
Underwater Power Tools for In Situ Preservation, Cleaning and Consolidation of Submerged Archaeological Remains


Abstract
:1. Introduction
2. Materials and Methods
- Underwater cleaning brush tool that features a 650 Kv brushless motor and an ergonomic lightweight design that makes more efficient and faster the cleaning operations carried out underwater by restorers to perform a soft cleaning of the submerged archaeological structures and artefacts.
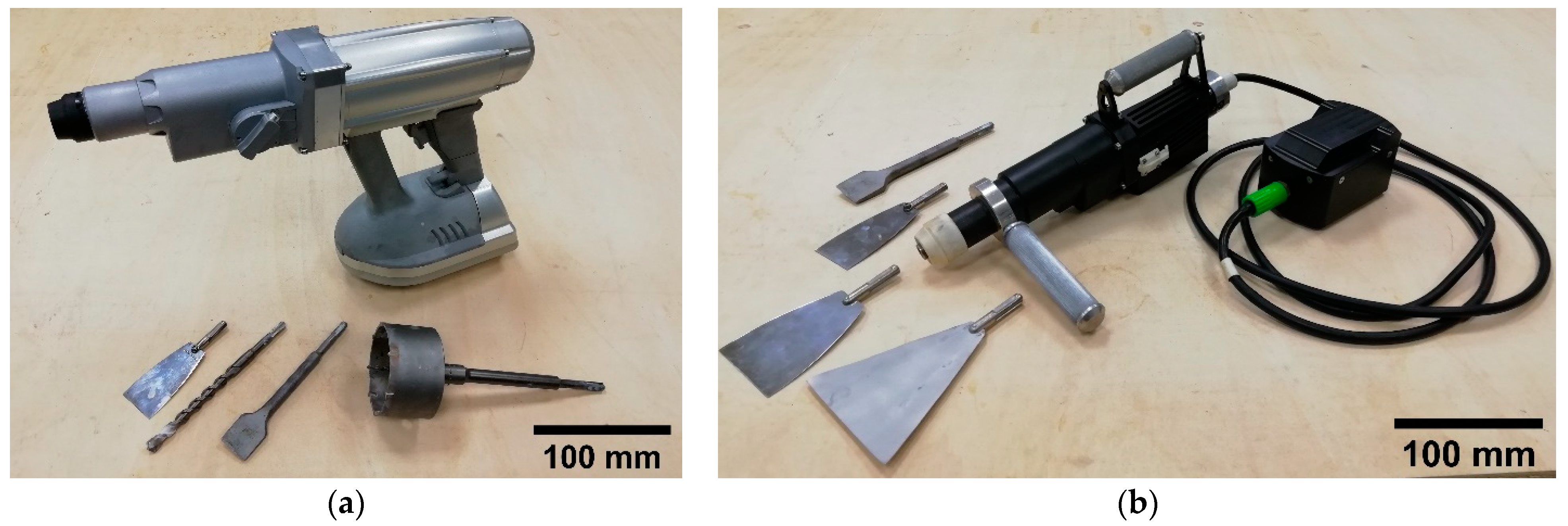
- Underwater multifunctional hammer drill that features a standard SDS (Slotted Drive System) chuck that allows the use of stainless-steel drill bits, core bits and chisels for the removal of dense encrustations.
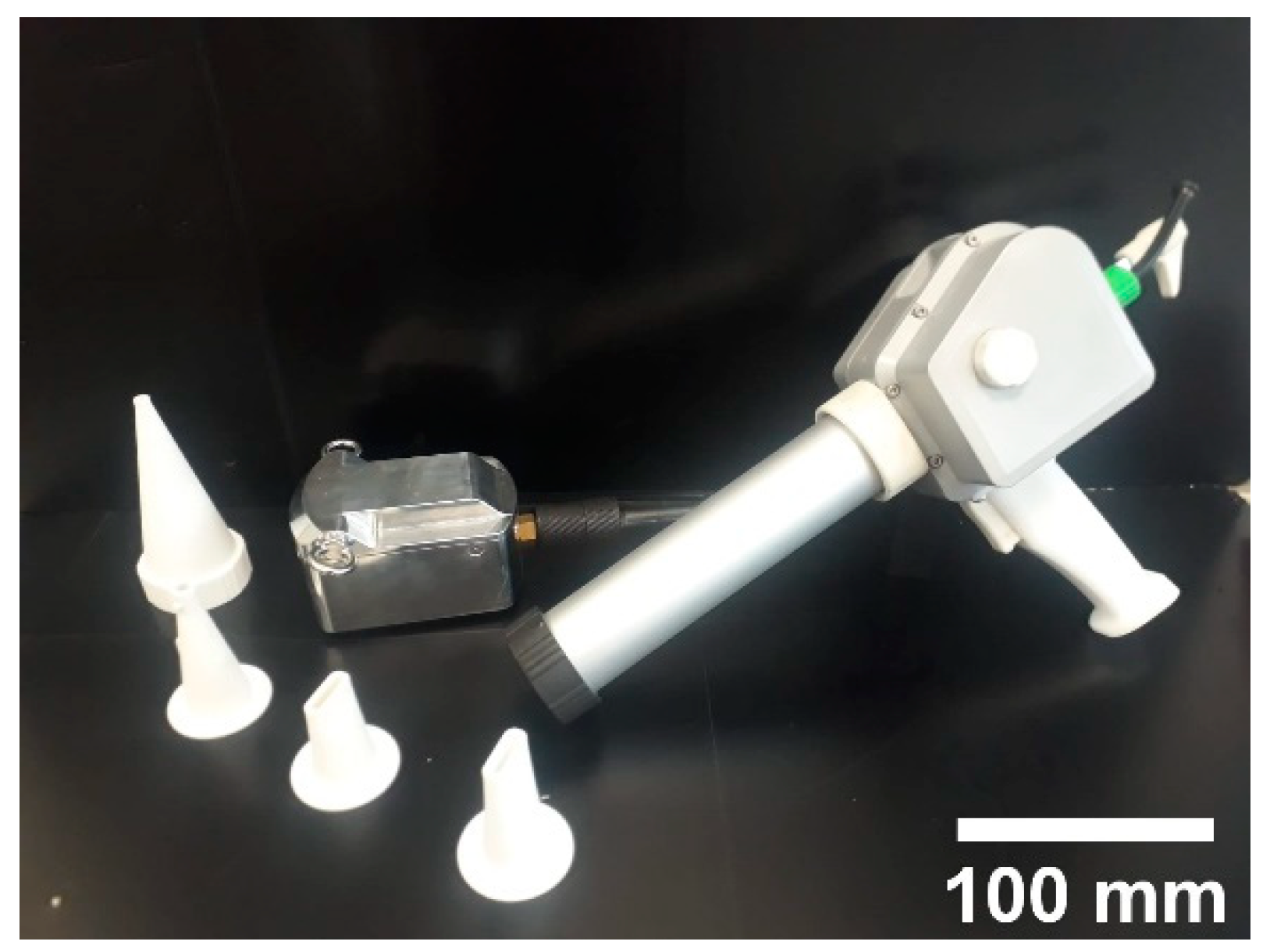
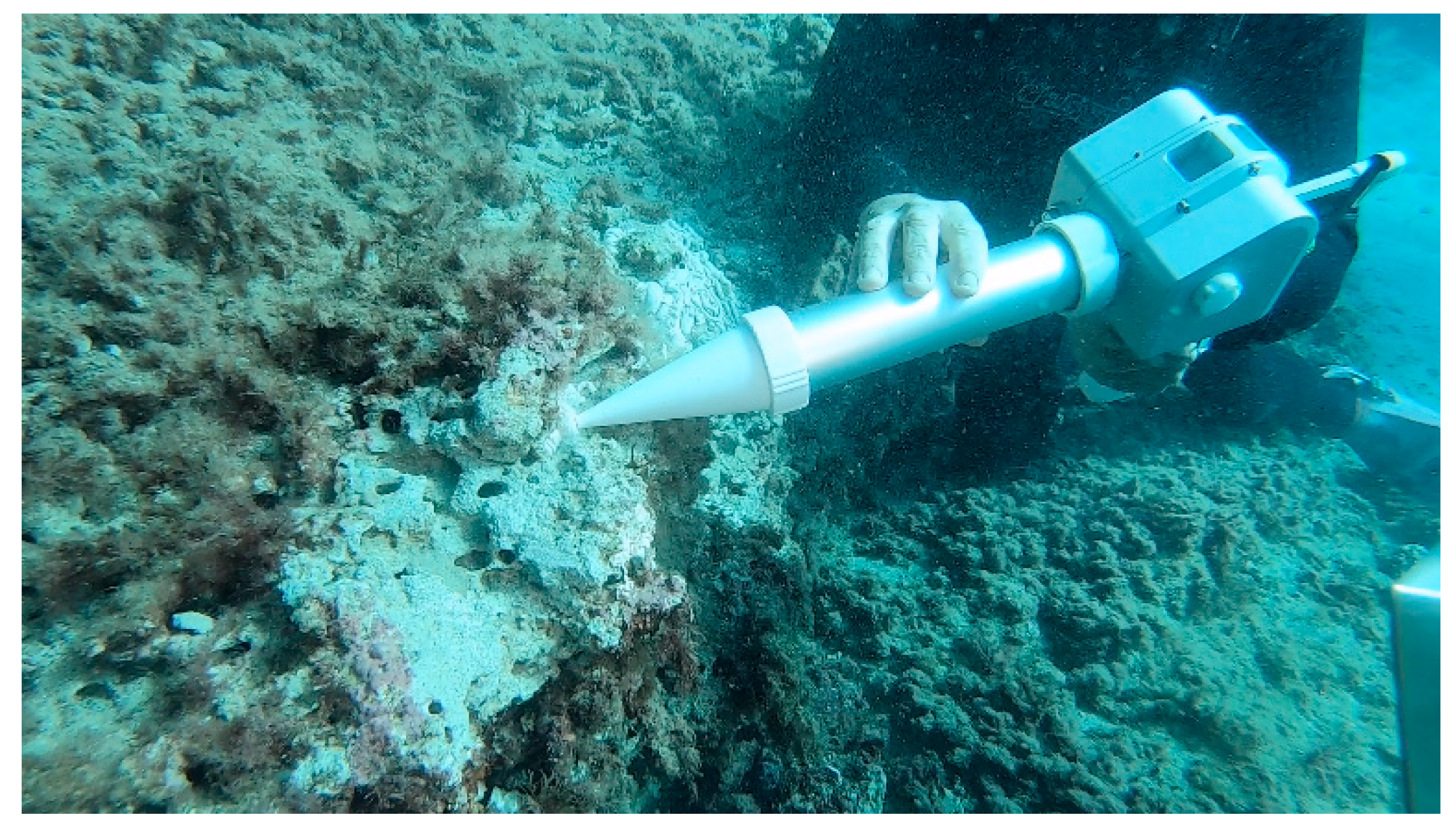
- Underwater injection tool that features an aluminium mortar cartridge and an 18 V brushed motor to extrude mortar through nozzles of different shapes and sizes. This feature, along with the ergonomic handle, significantly reduces the restorers’ arm and wrist efforts needed to perform consolidation activities.
3. Results
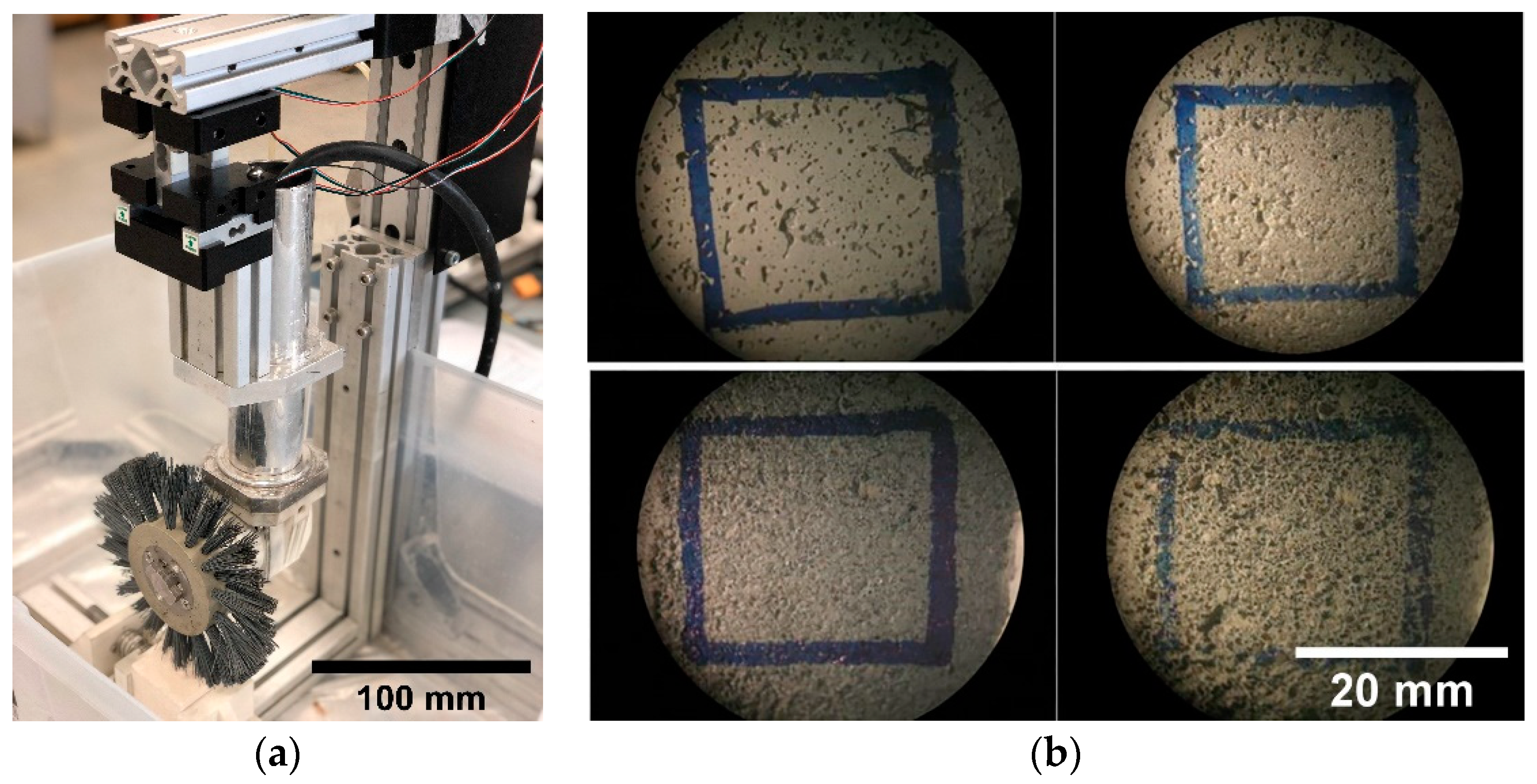
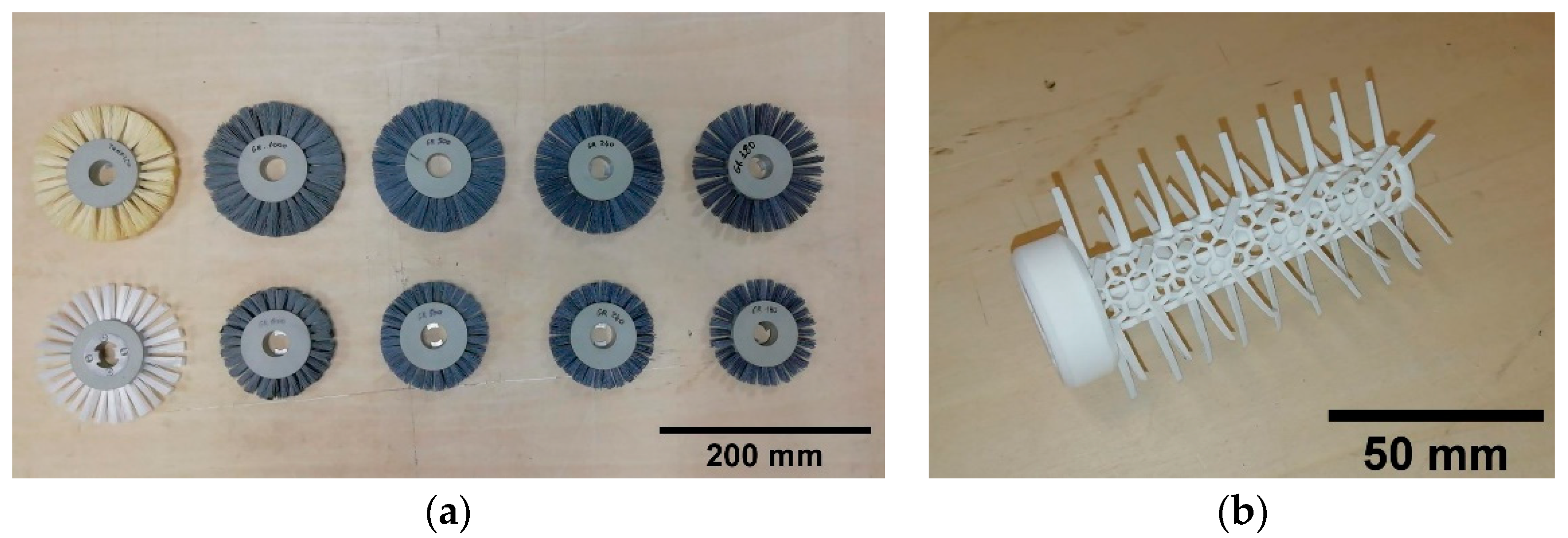
3.1. Underwater Cleaning Brush Tool
3.2. Underwater Multifunctional Hammer Drill
3.3. Underwater Mortar Injection Tool
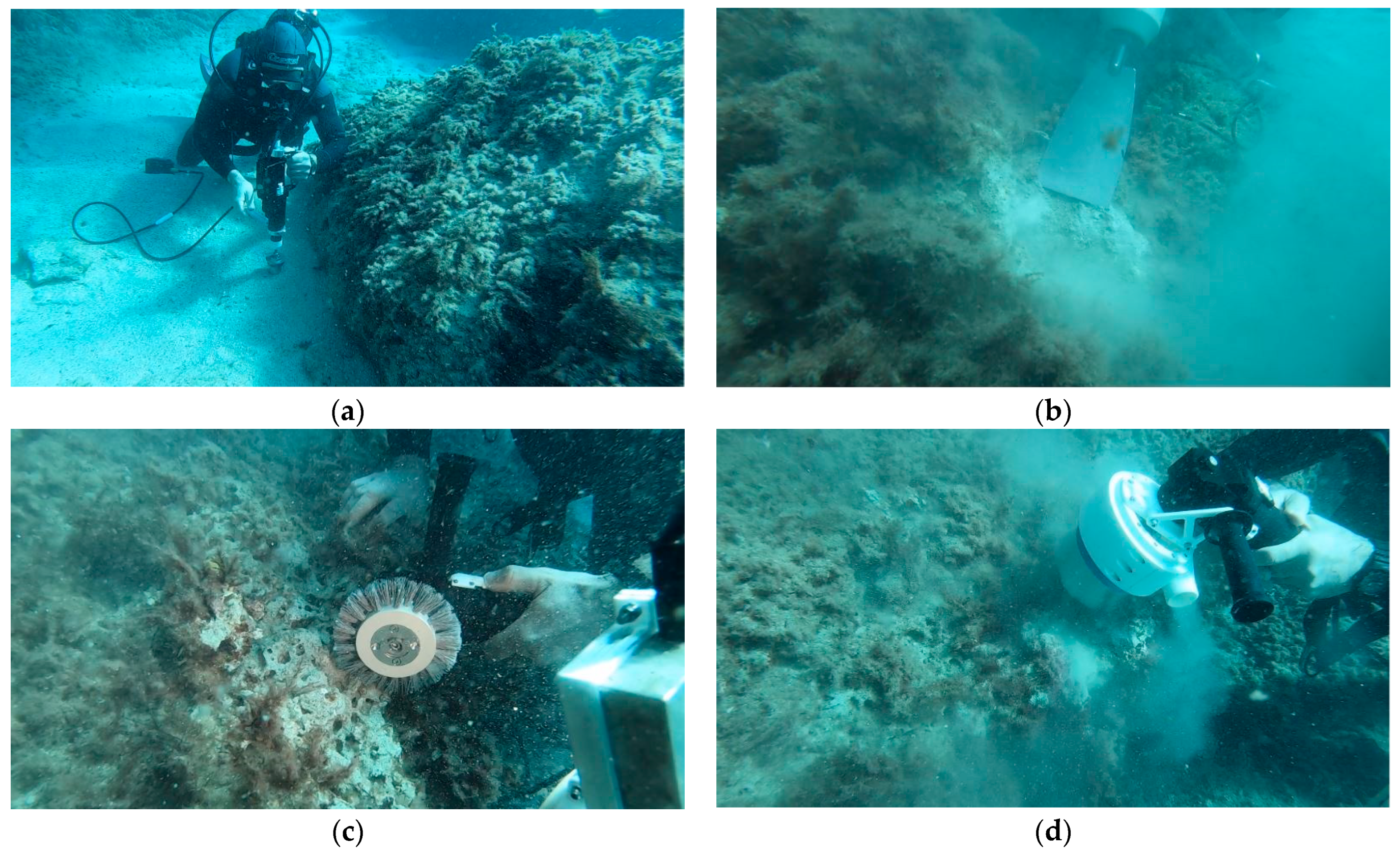
3.4. Field Tests
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Unesco. Convention on the Protection of the Underwater Cultural Heritage, Paris, France, 2 November 2001. Available online: http://portal.unesco.org/en/ev.php-URL_ID=13520&URL_DO=DO_TOPIC&URL_SECTION=201.html (accessed on 18 June 2021).
- Maarleveld, T.J.; Guérin, U.; Egger, B. Manual for Activities Directed at Underwater Cultural Heritage: Guidelines to the Annex of the UNESCO 2001 Convention; Unesco: Paris, France, 2013. [Google Scholar]
- Dromgoole, S. 2001 UNESCO convention on the protection of the underwater cultural heritage. Int. J. Mar. Coast. Law 2003, 18, 59–108. [Google Scholar] [CrossRef]
- Davidde, B. Methods and strategies for the conservation and museum display in situ of underwater cultural heritage. Archaeol. Marit. Mediterr. 2004, 1, 137–150. [Google Scholar]
- Khakzad, S.; Van Balen, K. Complications and effectiveness of in situ preservation methods for underwater cultural heritage sites. Conserv. Manag. Archaeol. Sites 2012, 14, 469–478. [Google Scholar] [CrossRef]
- Muckelroy, K. Maritime Archaeology; Cambridge University Press: Cambridge, UK, 1978. [Google Scholar]
- Babits, L.E. , Van Tilburg, H. Maritime Archaeology: A Reader of Substantive and Theoretical Contributions; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- ICOMOS. Underwater Cultural Heritage at Risk: Managing Natural and Human Impacts; ICOMOS: Paris, France, 2006. [Google Scholar]
- Davidde, B. Underwater archaeological parks: A new perspective and a challenge for conservation—the Italian panorama. Int. J. Naut. Archaeol. 2002, 31, 83–88. [Google Scholar]
- Pearson, C. Conservation of Marine Archaeological Objects; Elsevier: Amsterdam, Netherlands, 2014. [Google Scholar]
- Bruno, F.; Muzzupappa, M.; Barbieri, L.; Gallo, A.; Ritacco, G.; Lagudi, A.; Guida, R. The CoMAS project: New materials and tools for improving the in situ documentation, restoration, and conservation of underwater archaeological remains. Mar. Technol. Soc. J. 2016, 50, 108–118. [Google Scholar] [CrossRef]
- Bruno, F.; Muzzupappa, M.; Gallo, A.; Barbieri, L.; Galati, D.; Spadafora, F.; Petriaggi, R. Electromechanical devices for supporting the restoration of underwater archaeological artefacts. In Proceedings of the OCEANS 2015, Genova, Italy, 12–21 May 2015; pp. 1–5. [Google Scholar]
- Barbieri, L.; Bruno, F.; De Napoli, L.; Gallo, A.; Muzzupappa, M. Design of an electric tool for underwater archaeological restoration based on a user centred approach. In Advances on Mechanics, Design Engineering and Manufacturing; Springer: Cham, Switzerland, 2017; pp. 353–362. [Google Scholar]
- Bruno, F.; Muzzupappa, M.; Lagudi, A.; Gallo, A.; Spadafora, F.; Ritacco, G.; Angilica, A.; Barbieri, L.; Di Stefano, G.; Guida, R.; et al. A ROV for supporting the planned maintenance in underwater archaeological sites. In Proceedings of the Oceans 2015-Genova, Washington, DC, USA, 19–22 October 2015; pp. 1–7. [Google Scholar]
- Petriaggi, R.; Davidde, B. The ISCR Project "Restoring Underwater: An evaluation of the results after ten years from the beginning. In Proceedings of the 4th Conference on Preserving Archaeological Remains in Situ, Conservation and Management of Archaeological Sites, Copenhagen, Denmark, 23–26 May 2011; pp. 193–200. [Google Scholar]
- Cámara, B.; de Buergo, M.Á.; Bethencourt, M.; Fernández-Montblanc, T.; La Russa, M.F.; Ricca, M.; Fort, R. Biodeterioration of marble in an underwater environment. Sci. Total Environ. 2017, 609, 109–122. [Google Scholar] [CrossRef]
- Warscheid, T.; Braams, J. Biodeterioration of stone: A review. Int. Biodeterior. Biodegrad. 2000, 46, 343–368. [Google Scholar] [CrossRef]
- Ruffolo, S.A.; Ricca, M.; Macchia, A.; La Russa, M.F. Antifouling coatings for underwater archaeological stone materials. Prog. Org. Coat. 2017, 104, 64–71. [Google Scholar] [CrossRef]
- Davidde, B.; Bartolini, M.; Poggi, D.; Ricci, S. Marine bioerosion of stone artefacts preserved in the Museo Archeologico dei Campi Flegrei in the Castle of Baia (Naples). Arcaeol. Marit. Mediterr. 2010, 7, 75–115. [Google Scholar]
- Goggin, J.M. Underwater archaeology: Its nature and limitations. Am. Antiq. 1960, 25, 348–354. [Google Scholar] [CrossRef]
- La Russa, M.F.; Ruffolo, S.A.; Ricca, M.; Rovella, N.; Barca, D.; Gallo, A.; Lupia, M. The MaTaCoS project: New perspective in the conservation of underwater cultural heritage. In Proceedings of the X AIAr (Italian Archaeometric Society) National Convention, Turin, Italy, 14–17 February 2018. [Google Scholar]
- Green, J. Maritime Archaeology: A Technical Handbook; Routledge: Oxfordshire, UK, 2016. [Google Scholar]
- Bowens, A. (Ed.) Underwater Archaeology: The NAS Guide to Principles and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Mancinelli, R.; Petriaggi, R. An Experimental Conservation Treatment on the Mosaic Floor and Perimeter Walls of Room n. 1 of the So-Called" Villa con ingresso a protiro" in the Underwater Archaeological Park of Baia (Naples). Archaeol. Marit. Mediterr. 2004, 1, 109–126. [Google Scholar]
- Black, S.A. Seawater hydraulic systems for underwater equipment. In Offshore Technology Conference; OnePetro: Richardson, TX, US, 1981. [Google Scholar]
- Eppinger, S.; Ulrich, K. Product Design and Development, 7th ed.; McGraw-Hill Higher Education: New York, NY, USA, 2020. [Google Scholar]
- Boothroyd, G.; Dewhurst, P.; Knight, W.A. Product Design for Manufacture and Assembly; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Barbieri, L.; Calzone, F.; Muzzupappa, M. Form and function: Functional optimization and Additive Manufacturing. In Advances on Mechanics, Design Engineering and Manufacturing II; Springer: Cham, Switzerland, 2019; pp. 649–658. [Google Scholar]
- EU Patent n. EP3414800A1, 19/12/2018—Title: Device for Realizing an Underwater Electrical Connection. Available online: https://data.epo.org/gpi/EP3414800A1-DEVICE-FOR-REALIZING-AN-UNDERWATER-ELECTRICAL-CONNECTION (accessed on 1 April 2021).
- Italian Patent n. ITUB20160783A1, 16-08-2017—Title: Actuation System for Electric Tools. Available online: https://patents.google.com/patent/ITUB20160783A1/en (accessed on 1 April 2021).
- Stepanoff, A.J. Centrifugal and Axial Flow Pumps: Theory, Design, and Application; Krieger Pub Co: Malabar, FL, USA, 1993. [Google Scholar]
- Didier, W. Development and Validation of a Mathematical Model for Predicting the Performance of Rotary Hammer Drills. Master’s Thesis, University of Wisconsin-Milwaukee, Milwaukee, WI, USA, 2013. [Google Scholar]
- Pheasant, S.; Haslegrave, C.M. Bodyspace: Anthropometry, Ergonomics, and the Design of Work; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| M1 Brush 120 mm | M2 Brush 80 mm | ||||||
|---|---|---|---|---|---|---|---|
| Speed | Brush Pressure | Current (A) | Vertical Force (g) | Tangential Force (g) | Current (A) | Vertical Force (g) | Tangential Force (g) |
| V1 | S1 | 1.24 | 91 | 35 | 1.20 | 150 | 41 |
| S2 | 1.29 | 209 | 211 | 1.25 | 352 | 86 | |
| S3 | 1.33 | 158 | 196 | 1.27 | 536 | 102 | |
| V2 | S1 | 2.6 | 117 | 276 | 2.55 | 256 | 78 |
| S2 | 2.93 | 276 | 357 | 2.70 | 456 | 125 | |
| S3 | 3.03 | 276 | 422 | 2.83 | 625 | 254 | |
| V3 | S1 | 5.86 | 221 | 291 | 5.45 | 280 | 95 |
| S2 | 6.26 | 181 | 176 | 5.86 | 369 | 156 | |
| S3 | 6.35 | 165 | 743 | 6.03 | 568 | 335 | |
| Speed (RPM) | BPM | No Load Current (A) | Full Load Current (A) |
|---|---|---|---|
| 8500 | 1800 | 3.5 | 3.8 |
| 13,800 | 2900 | 5.8 | 7.8 |
| 22,000 | 4650 | 8.2 | 12.6 |
| Motor A | Motor B | |
|---|---|---|
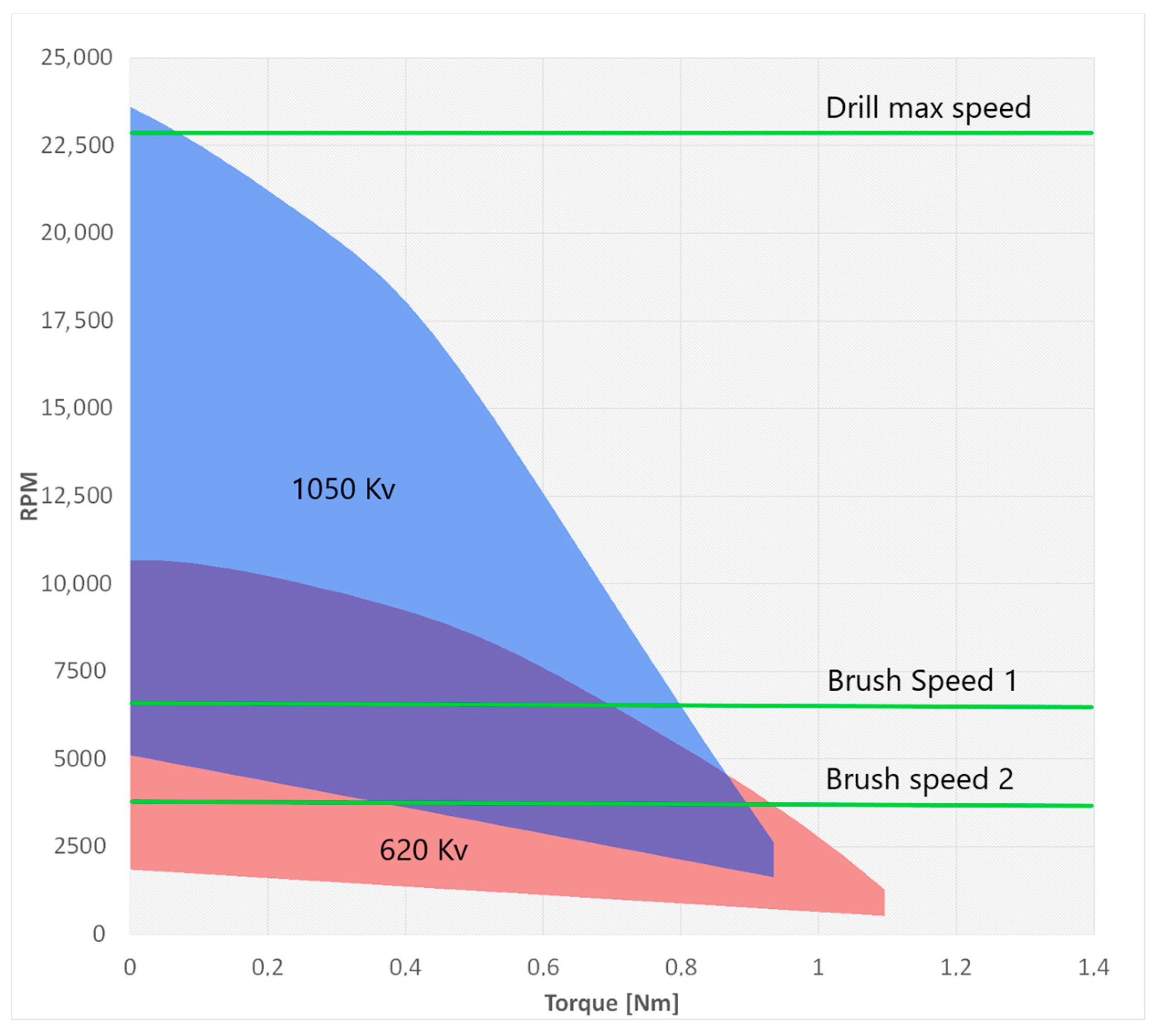
| RPM/V | 1050 Kv | 620 Kv |
| Poles | 1.5Y | 4 |
| Voltage (max) | 22.2 V (6S) | 18.5 V (5S) |
| Current (max) | 160 A | 110 A |
| Power (max) | 3100 W | 1750 W |
| Current (no load) | 1.4 A | 1.87 A |
| Diameter | 39 mm | 39 mm |
| Length | 84 mm | 78 mm |
| Shaft | 5 mm | 5 mm |
| Weight | 490 g | 365 g |
| Cleaning Brush Tool | |
|---|---|
| Dimensions, body (l × w × h) * | 286 × 78 × 135 mm |
| Dimensions with integrated battery (l × w × h) * | 398 × 99 × 140 mm |
| Quick release brush attachment: | |
| Standard tool attachment | M14 × 2 |
| Tool speed: | |
| Speed 1 | 1000 RPM |
| Speed 2 | 1500 RPM |
| Maximum power | 400 W |
| Battery | Li-Ion 5 Ah |
| Voltage | 18 V |
| Tool Weight **: | |
| in air | 2.60 kg |
| in water | 1.40 kg |
| External battery pack weight: | |
| in air | 1.90 kg |
| in water | 0.85 kg |
| Underwater Compact Chisel | |
|---|---|
| Dimensions (l × w × h) * | 373 × 82 × 150 mm |
| Tool attachment | SDS-plus |
| Impact energy (max) | 2.5 J |
| Impact rate | 0–4800 BPM |
| Power | 1000 W |
| Battery | Li-Ion 5 Ah |
| Voltage | 18 V |
| Tool Weight **: | |
| in air | 3.80 kg |
| in water | 2.20 kg |
| External battery pack weight: | |
| in air | 1.90 kg |
| in water | 0.85 kg |
| Underwater Rotary Hammer | |
|---|---|
| Dimensions (l × w × h) * | 536 × 154 × 367 mm |
| Tool attachment | SDS-plus |
| Impact energy | 3.2 J |
| Tool speed | 0–1400 RPM |
| Impact rate | 0–4800 BPM |
| Drilling capacity: | |
| wood | 30 mm |
| steel | 13 mm |
| concrete | 26 mm |
| concrete (with coring tools) | 68 mm |
| Power | 1200 W |
| Battery | Li-Ion 5 Ah |
| Voltage | 18 V |
| Weight: | |
| in air | 9.40 kg |
| in water | 3.57 kg |
| Mortar Injection Tool | |
|---|---|
| Dimensions (l × w × h) | 420 × 148 × 261 mm |
| Maximum pulling force | 225 kg |
| Piston speed (with no load) | 1–6 mm/s |
| Extrusion speed: | |
| Circular nozzle 4 mm | 50–330 mm/s |
| Circular nozzle 8 mm | 12.5–83 mm/s |
| Circular nozzle 12 mm | 5–33 mm/s |
| Cartridge capacity | 0.52 L |
| Battery (integrated) | Li-Ion 2 Ah |
| Voltage | 18 V |
| Weight in air | 3.65 kg |
| Weight in water | 1.55 kg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scalercio, E.; Sangiovanni, F.; Gallo, A.; Barbieri, L. Underwater Power Tools for In Situ Preservation, Cleaning and Consolidation of Submerged Archaeological Remains. J. Mar. Sci. Eng. 2021, 9, 676. https://doi.org/10.3390/jmse9060676
Scalercio E, Sangiovanni F, Gallo A, Barbieri L. Underwater Power Tools for In Situ Preservation, Cleaning and Consolidation of Submerged Archaeological Remains. Journal of Marine Science and Engineering. 2021; 9(6):676. https://doi.org/10.3390/jmse9060676
Chicago/Turabian StyleScalercio, Emiliano, Francesco Sangiovanni, Alessandro Gallo, and Loris Barbieri. 2021. "Underwater Power Tools for In Situ Preservation, Cleaning and Consolidation of Submerged Archaeological Remains" Journal of Marine Science and Engineering 9, no. 6: 676. https://doi.org/10.3390/jmse9060676