



Intelligent Short-Term Multiscale Prediction of Parking Space Availability Using an Attention-Enhanced Temporal Convolutional Network


Abstract
:1. Introduction
1.1. Literature Review
1.2. Research Questions
- (a)
- Is there an alternative calculation method that is faster and more efficient than existing methods? Can this method effectively predict parking space availability, by considering it as a time series with periodic changes?
- (b)
- Which factors should be considered? Multiple influencing factors, such as dates, weather conditions, etc., are usually expressed in textual form. How can these factors be quantified and incorporated into numerical calculations?
- (c)
- What is the appropriate time scale for prediction? Should the prediction time interval be in minutes, days, or months?
1.3. Proposed Solution
- (a)
- Firstly, the applicability of TCN was evaluated using a single input of time series. Then, the parameterization of multiple influencing factors was discussed.
- (b)
- To evaluate the impact of various parameters on parking space availability, the network was improved by incorporating multiple input channels and implementing attention mechanisms to achieve an efficient allocation of information processing resources.
- (c)
- We expected the time precision of prediction to be as refined as possible without wasting computational resources, to provide reference for precise regulation of traffic flow. However, longer periodic predictions can provide longer preparation time for the formulation and implementation of residents’ travel and transportation policies from a macro perspective, similar to weather forecasts. Therefore, we considered two time scales: ultra-short-term predictions with minute intervals and short-term predictions with daily intervals. We validated the prediction results of available parking spaces using these two scales, and then evaluated the prediction of the parking lot congestion index by considering multiple influencing factors.
1.4. Research Contributions
- (a)
- This paper proposes different TCN solutions for different time units and time sequence lengths in various scenarios. For ultra-short-term NAP prediction, data at each minute of a single natural month were used for the dataset. Unlike previously reported approaches that excluded static data at night, this study retains the continuity of time-series features, which leads to higher accuracy. This suggests that the continuity of static data as a sequence in the time dimension should not be ignored, as it plays an important role in the network’s learning and optimization process. For short-term parking predictions on a daily basis, the BI was introduced to quantify the availability of parking places in the parking lot. The impact of various factors, such as date, extreme weather, and human regulation, was considered to forecast time-series changes over a relatively longer time span, which represents a novel approach.
- (b)
- To achieve the described functions, a network architecture for A-TCN is proposed based on the original TCN. To address the influence of multiple factors, a spatial attention mechanism module is introduced to intelligently adjust the weights of different factors without changing the size of the input tensor. For datasets with different amounts of data, suitable network depths and training parameter suggestions are provided. The obtained accuracy results are intended to be higher than those achieved in previous studies.
2. Materials and Methods
- (a)
- Parallelism: TCN allows for a higher speed compared with RNN.
- (b)
- Flexible receptive field size: TCN provides better control over the model’s memory size and adaptability to different domains.
- (c)
- Stable gradients: TCN avoids the issues of gradient explosion/vanishing that are commonly encountered in RNN networks.
- (d)
- Low memory requirements: TCN exhibits lower memory requirements during training.
- (e)
- Variable-length inputs: TCN can handle sequence data of any length, providing flexibility in dealing with inputs of different sizes.
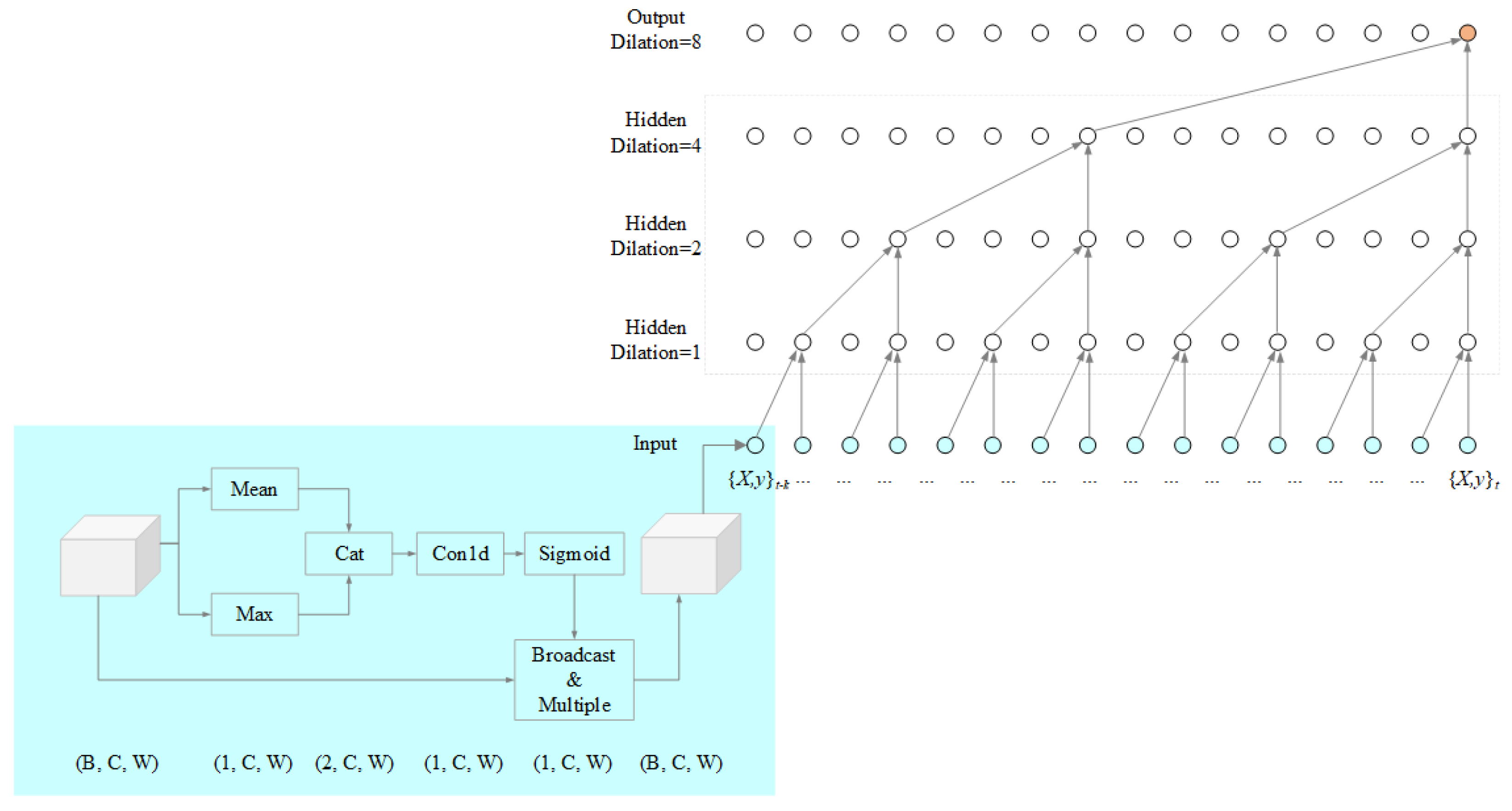
2.1. Attention-Temporal Convolution Network
2.1.1. Network Architecture
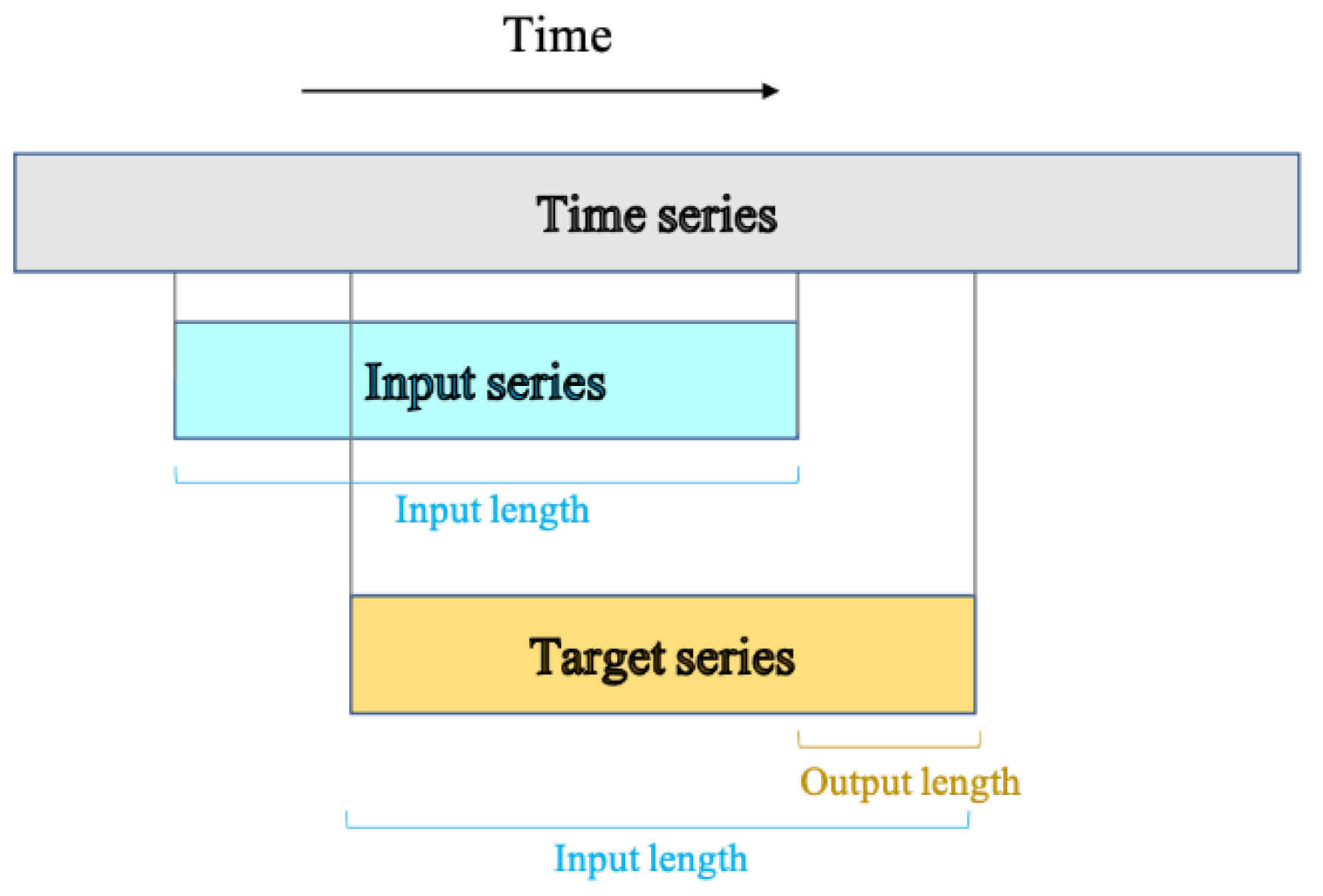
2.1.2. Inputs and Targets
2.1.3. Data Preprocessing Module
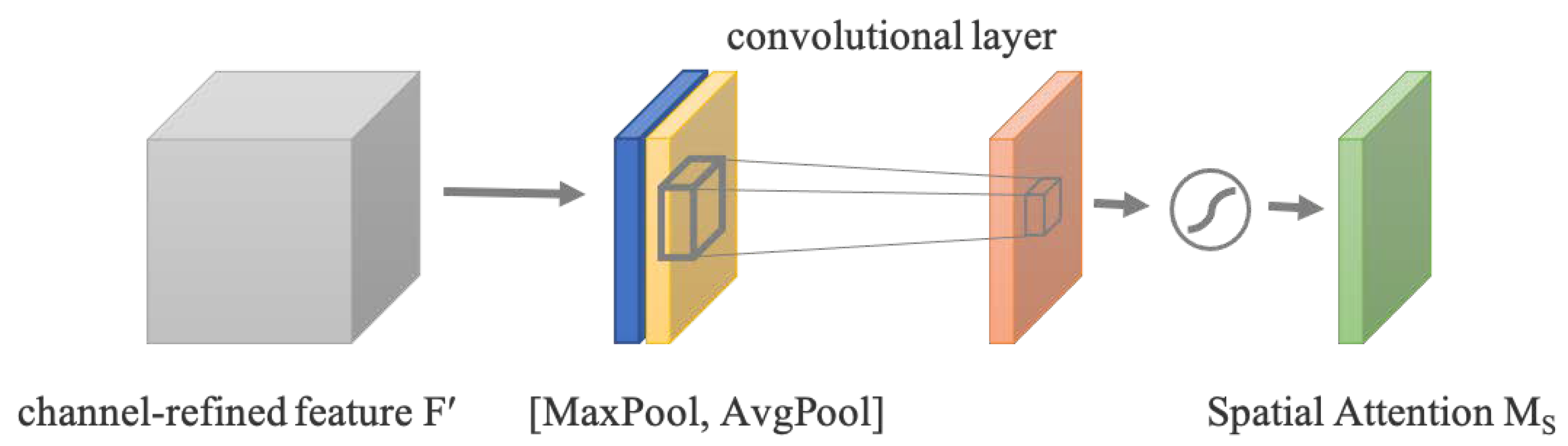
2.1.4. Spatial Attention Module
2.2. Data Preprocessing Method
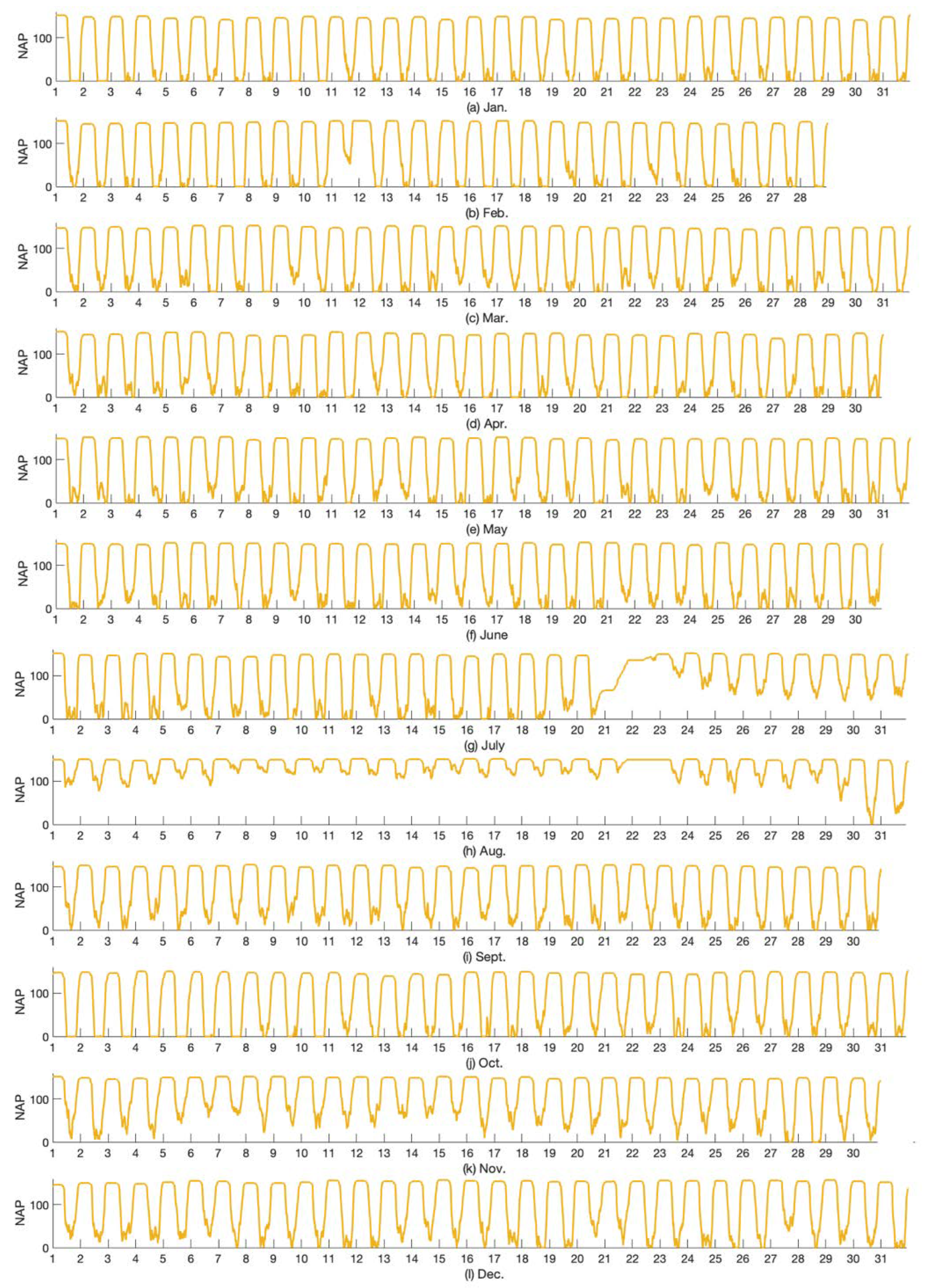
2.2.1. Normalization of NAP Time Series
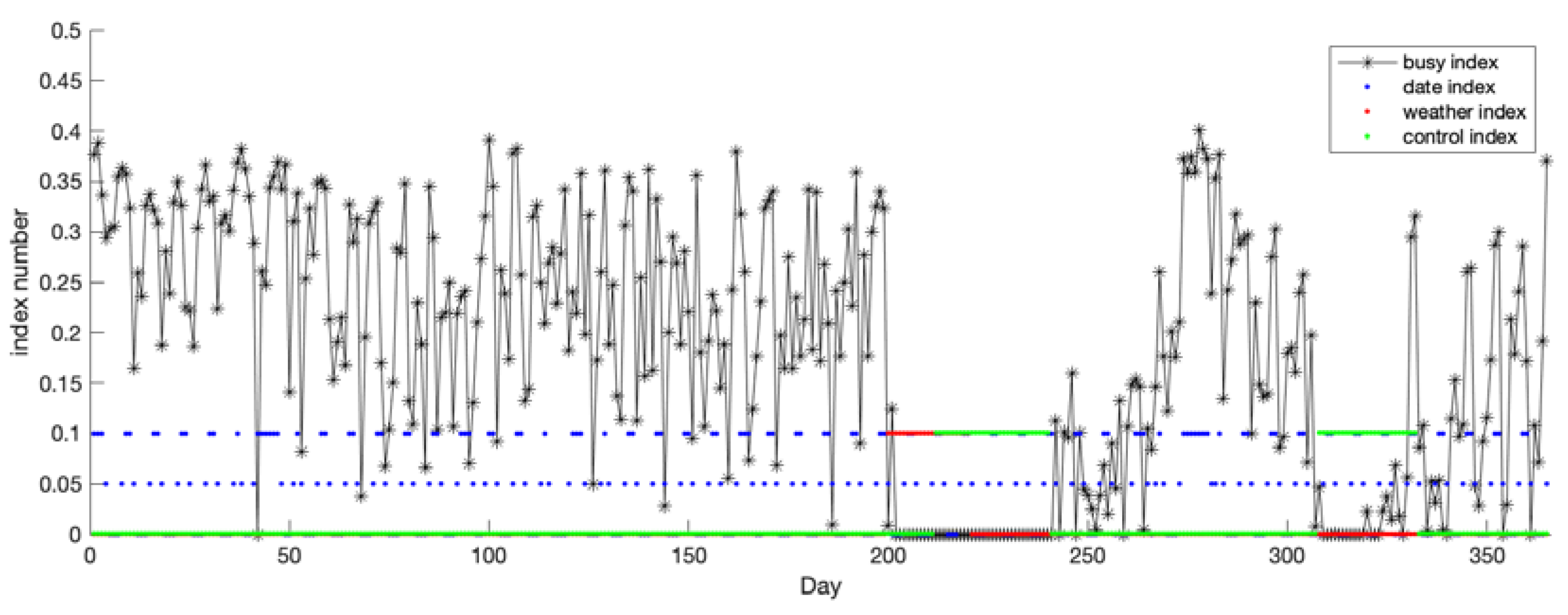
2.2.2. Multidimensional Evaluation and Quantification of Influencing Factors
- DI: The associated dates are classified into three types: working days not adjacent to holidays, working days adjacent to holidays, and holidays. The weight of working days not adjacent to holidays is 0, the weight of working days adjacent to holidays is 0.05, and the weight of holidays is 0.1.
- WI: Ordinary weather does not have a significant impact on parking space availability in the city’s parking lots, so only the suppression effect of extreme weather conditions is considered. The parameter weight of extreme weather is set to 0.1, and the weight of common weather is 0.
- CI: Negative interventions, such as traffic control, are the primary consideration, mainly manifested as the release of parking resources. The weight during such periods is set as 0.1, and the weight for periods with no intervention is set as 0.
2.3. Performance Measures
3. Experiment and Results
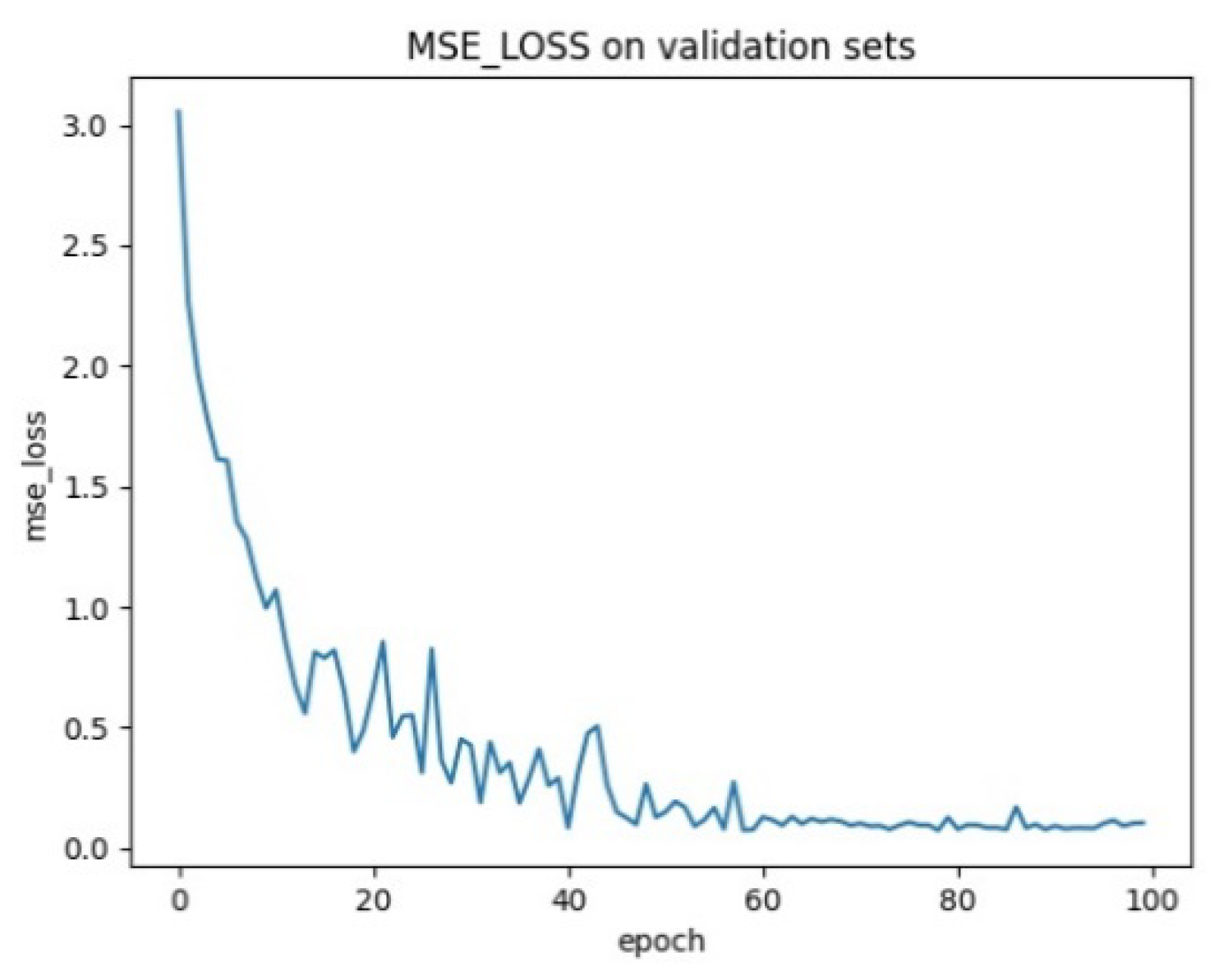
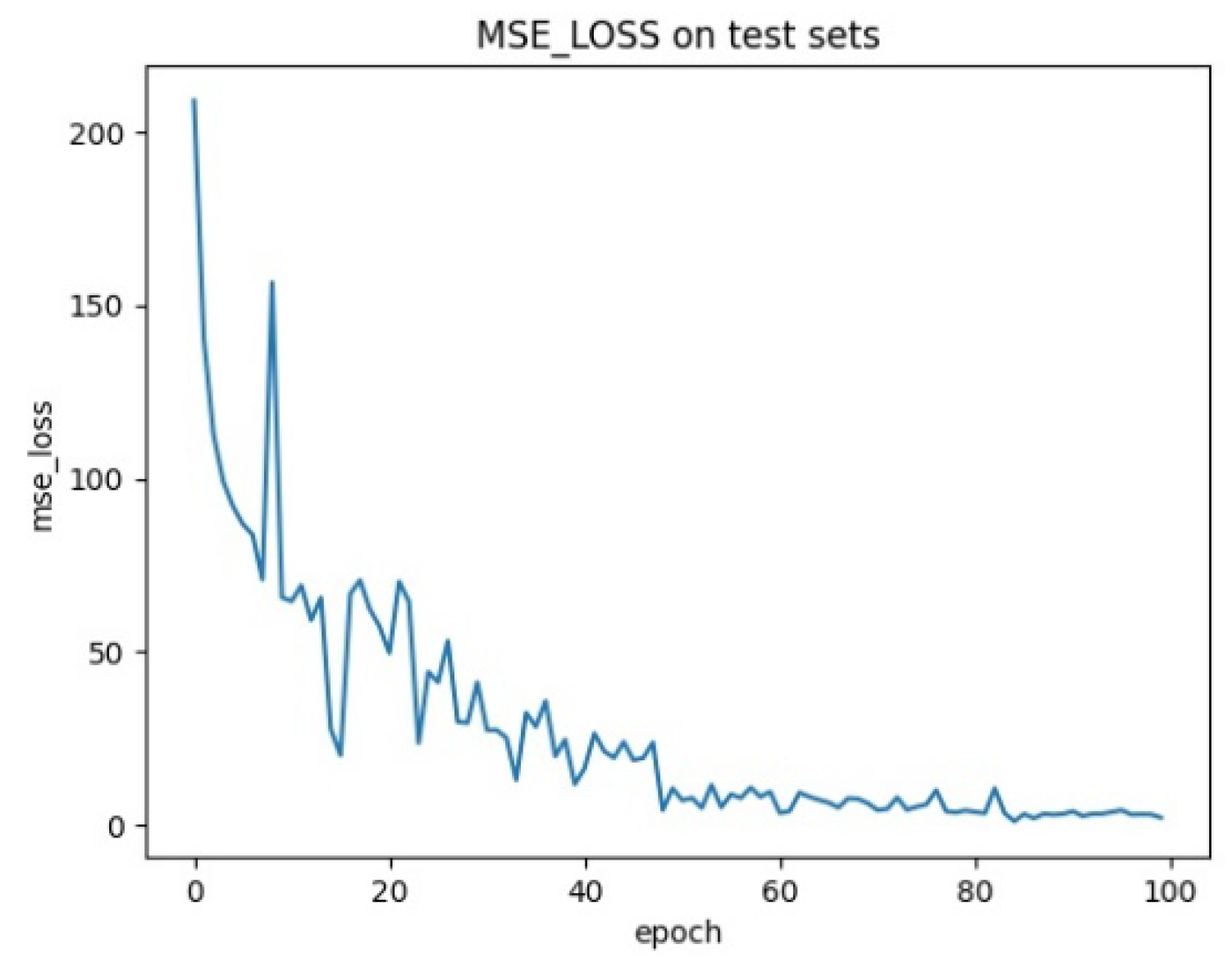
3.1. Network Training
3.2. Analysis of Ultra-Short-Term Forecasting Results on TCN
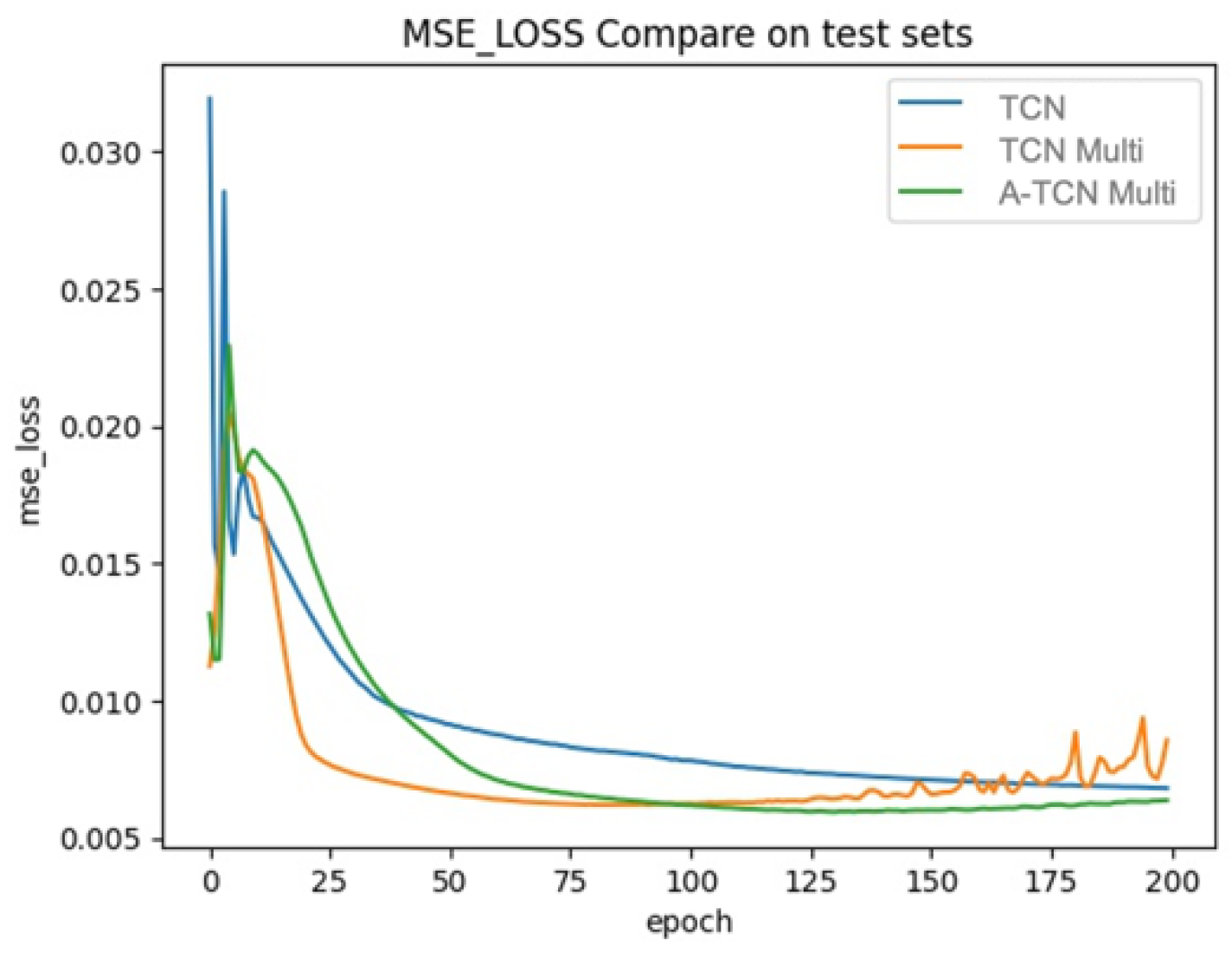
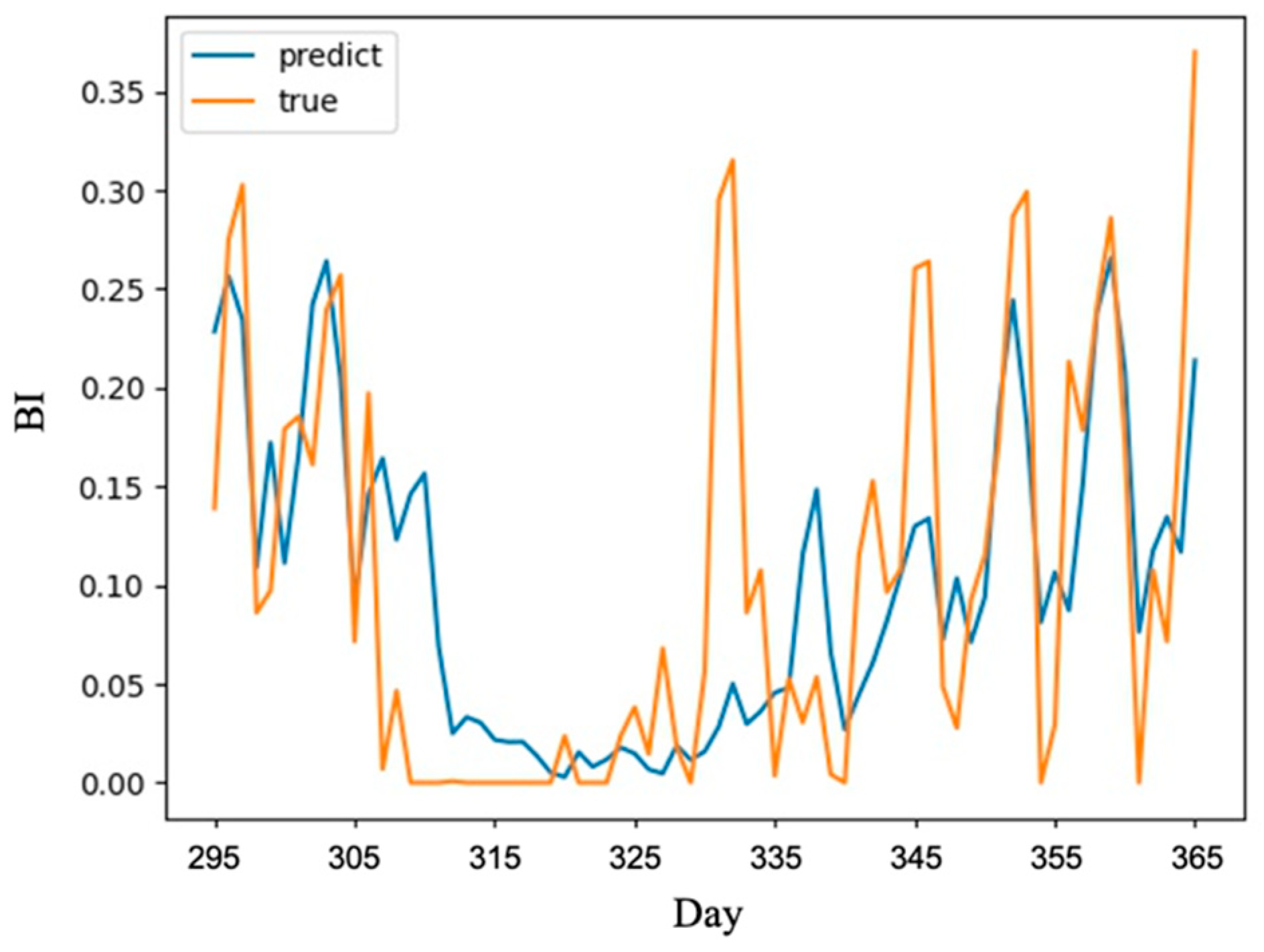
3.3. Analysis of Short-Term Forecasting Results on A-TCN
4. Discussion
4.1. Advantages and Drawbacks of TCN
- Data storage during validation. During validation/testing, an RNN only needs to maintain the hidden state and obtain the current input to generate predictions. In other words, a fixed length set of vectors provides a summary of the entire history, and the observed sequence can be discarded. In contrast, a TCN needs to receive the original sequence of valid historical length, so it may require more memory during evaluation.
- Potential parameter change for a transfer of domain. Different domains may have varying requirements for the number of historical data points needed for model predictions. Therefore, when transferring the model from a domain that requires minimal memory to one that requires longer memory, a TCN may not have a sufficiently large receptive field.
4.2. Prospects
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ogryzek, M.; Krupowicz, W.; Sajnóg, N. Public Participation as a Tool for Solving Socio-Spatial Conflicts of Smart Cities and Smart Villages in the Sustainable Transport System. Remote Sens. 2021, 13, 4821. [Google Scholar] [CrossRef]
- Yin, C.; Xiong, Z.; Chen, H.; Wang, J.; Cooper, D.; David, B. A literature survey on smart cities. Sci. China Inf. Sci. 2015, 58, 100102. [Google Scholar] [CrossRef]
- Pereira, G.V.; Parycek, P.; Falco, E.; Kleinhans, R. Smart governance in the context of smart cities: A literature review. Inf. Policy 2018, 23, 143–162. [Google Scholar] [CrossRef]
- Giuffrè, T.; Siniscalchi, S.M.; Tesoriere, G. A Novel Architecture of Parking Management for Smart Cities. Procedia–Soc. Behav. Sci. 2012, 53, 16–28. [Google Scholar] [CrossRef]
- Errousso, H.; Alaoui, E.A.A.; Benhadou, S.; Medromi, H. Exploring how independent variables influence parking occupancy prediction: Toward a model results explanation with SHAP values. Prog. Artif. Intell. 2022, 11, 367–396. [Google Scholar] [CrossRef]
- She, F.; Qiu, J.; Tang, M. Simulation of prediction for free parking spaces in large parking lots. Appl. Res. Comput. 2019, 36, 851–854. (In Chinese) [Google Scholar]
- Wang, Q.; Li, H. Design of Parking Space Management System Based on Internet of Things Technology. In Proceedings of the 2022 IEEE Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC 2022), Dalian, China, 14–16 April 2022. [Google Scholar]
- Han, Y.; Zheng, Z.; Zhao, J.; Liu, C. Forecasting of effective parking space based on grey-distributed wavelet neural network model. J. Transp. Syst. Eng. Inf. Technol. 2017, 17, 60–67. (In Chinese) [Google Scholar]
- Klappenecker, A.; Lee, H.; Welch, J.L. Finding available parking spaces made easy. Ad. Hoc. Netw. 2014, 12, 243–249. [Google Scholar] [CrossRef]
- Athineos, M.; Ellis, D.P.W. Autoregressive modeling of temporal envelopes. IEEE Trans. Signal Process. 2007, 55, 5237–5245. [Google Scholar] [CrossRef]
- Liu, S.; Guan, H.; Yan, H.; Yin, H. Unoccupied Parking Space Prediction of Chaotic Time Series. In Proceedings of the Tenth International Conference of Chinese Transportation Professionals (ICCTP), Beijing, China, 4–8 August 2010. [Google Scholar] [CrossRef]
- Jia, W.; Zhao, D.; Shen, T.; Ding, S.; Zhao, Y.; Hu, C. An optimized classification algorithm by BP neural network based on PLS and HCA. Appl. Intell. 2015, 43, 176–191. [Google Scholar] [CrossRef]
- Chen, H.; Tu, X.; Wang, Y.; Zheng, J. Short-term parking space prediction based on wavelet-ELM neural network. J. Jilin Univ. Sci. Ed. 2017, 55, 388–392. (In Chinese) [Google Scholar]
- Xie, K. Characteristics and Optimization of Motor Vehicle Parking Space Sharing in the Central Business District of Universities. Master’s Thesis, Southeast University, Chongqing, China, 2014. (In Chinese). [Google Scholar]
- Gao, G.; Ding, Y.; Jiang, F.; Li, C. Prediction of parking guidance space based on BP neural networks. Comput. Syst. Appl. 2017, 1, 236–239. (In Chinese) [Google Scholar]
- Zhao, W.; Zhang, Y. Application research of parking lot free parking number prediction based on back propagation neural network. J. Harbin Univ. Commer. Nat. Sci. Ed. 2015, 2015, 44–46. (In Chinese) [Google Scholar]
- Ji, Y.; Tang, D.; Blythe, P.; Guo, W.; Wang, W. Short-term forecasting of available parking space using wavelet neural network model. IET Intell. Transp. Syst. 2014, 9, 202–209. [Google Scholar] [CrossRef]
- Ji, Y.; Chen, X.; Wang, W.; Hu, B. Short-term forecasting of parking space using particle swarm optimization–wavelet neural network model. J. Jilin Univ. Eng. Technol. Ed. 2016, 46, 399–405. (In Chinese) [Google Scholar] [CrossRef]
- Li, W.; Wang, X. Time series prediction method based on simplified LSTM neural network. J. Beijing Univ. Technol. 2021, 47, 480–488. (In Chinese) [Google Scholar] [CrossRef]
- Zeng, C.; Mia, C.; Wang, K.; Cui, Z. Predicting vacant parking space availability: A DWT-Bi-LSTM model. Phys. A Stat. Mech. Appl. 2022, 599, 127498. [Google Scholar] [CrossRef]
- Luo, X.; Li, D.; Yang, Y.; Zhang, S. Short-term traffic flow prediction based on KNN-LSTM. J. Beijing Univ. Technol. 2018, 44, 1521–1527. (In Chinese) [Google Scholar] [CrossRef]
- Bandara, K.; Bergmeir, C.; Hewamalage, H. LSTM-MSNet: Leveraging forecasts on sets of related time series with multiple seasonal patterns. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 1586–1599. [Google Scholar] [CrossRef]
- Shao, W.; Zhang, Y.; Guo, B.; Qin, K.; Chan, J.; Salim, F.D. Parking availability prediction with long short term memory model. In Green, Pervasive, and Cloud Computing (GPC 2018), Lecture Notes in Computer Science; Li, S., Ed.; Springer: Cham, Switzerland, 2019; Volume 11204, pp. 124–137. [Google Scholar] [CrossRef]
- Tian, Y.; Wei, C.; Xu, D. Traffic Flow Prediction Based on Stack AutoEncoder and Long Short-Term Memory Network. In Proceedings of the 2020 IEEE 3rd International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 20–22 November 2020. [Google Scholar] [CrossRef]
- Li, J.; Li, J.; Zhang, H. Deep Learning Based Parking Prediction on Cloud Platform. In Proceedings of the 2018 4th International Conference on Big Data Computing and Communications (BIGCOM), Chicago, IL, USA, 7–9 August 2018. [Google Scholar] [CrossRef]
- Camero, A.; Toutouh, J.; Stolfi, D.H.; Alba, E. Evolutionary deep learning for car park occupancy prediction in smart cities. In Learning and Intelligent Optimization (LION 12 2018), Lecture Notes in Computer Science; Battiti, R., Brunato, M., Kotsireas, I., Pardalos, P., Eds.; Springer: Cham, Switzerland, 2019; Volume 11353, pp. 386–401. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Short-term traffic forecasting: Where we are and where we’re going. Transp. Res. Part C Emerg. Technol. 2014, 43, 3–19. [Google Scholar] [CrossRef]
- Tanimura, R.; Hiromori, A.; Umedu, T.; Yamaguchi, H.; Higashino, T. Prediction of Deceleration Amount of Vehicle Speed in Snowy Urban Roads Using Weather Information and Traffic Data. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar] [CrossRef]
- Li, T.; Ma, J.; Lee, C. Markov-Based Time Series Modeling Framework for Traffic-Network State Prediction under Various External Conditions. J. Transp. Eng. Part A Syst. 2020, 146, 04020042. [Google Scholar] [CrossRef]
- Xu, X.J.; Bai, Y.L.; Xu, L.; Xu, Z.Z.; Zhao, X.W. Traffic flow prediction based on random forest in severe weather conditions. J. Shaanxi Norm. Univ. 2020, 48, 25–31. [Google Scholar] [CrossRef]
- Bao, X.; Jiang, D.; Yang, X.; Wang, H. An improved deep belief network for traffic prediction considering weather factors. Alex. Eng. J. 2021, 60, 413–420. [Google Scholar] [CrossRef]
- Nigam, A.; Srivastava, S. Weather impact on macroscopic traffic stream variables prediction using recurrent learning approach. J. Intell. Transp. Syst. Technol. Plan. Oper. 2023, 27, 19–35. [Google Scholar] [CrossRef]
- Zhang, D.; Kabuka, M.R. Combining weather condition data to predict traffic flow: A GRU-based deep learning approach. IET Intell. Transp. Syst. 2018, 12, 578–585. [Google Scholar] [CrossRef]
- Polson, N.G.; Sokolov, V.O. Deep learning for short-term traffic flow prediction. Transp. Research. Part C Emerg. Technol. 2017, 79, 1–17. [Google Scholar] [CrossRef]
- Bai, S.; Kolter, J.Z.; Koltun, V. An Empirical Evaluation of Generic Convolutional and Recurrent Networks for Sequence Modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar] [CrossRef]
- Lea, C.; Vidal, R.; Reiter, A.; Hager, G.D. Temporal Convolutional Networks: A Unified Approach to Action Segmentation. arXiv 2016, arXiv:1608.08242. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time Series Type | Time Interval | Start Date | End Date |
|---|---|---|---|
| Available parking places | 1 min | 1 January 2021 | 31 December 2021 |
| Multivariate factors | 1 day |
| Index | Parameter | Weight |
|---|---|---|
| DI | Working days not adjacent to holidays | 0 |
| Working days adjacent to holidays | 0.05 | |
| Holidays | 0.1 | |
| WI | Common weather | 0 |
| Extreme weather | 0.1 | |
| CI | None | 0 |
| Suppression | 0.1 |
| Time Scale | Time Unit | Number of Data Points |
|---|---|---|
| Ultra-short | Per minute in one month | 44,640 |
| Short | Per day in one year | 365 |
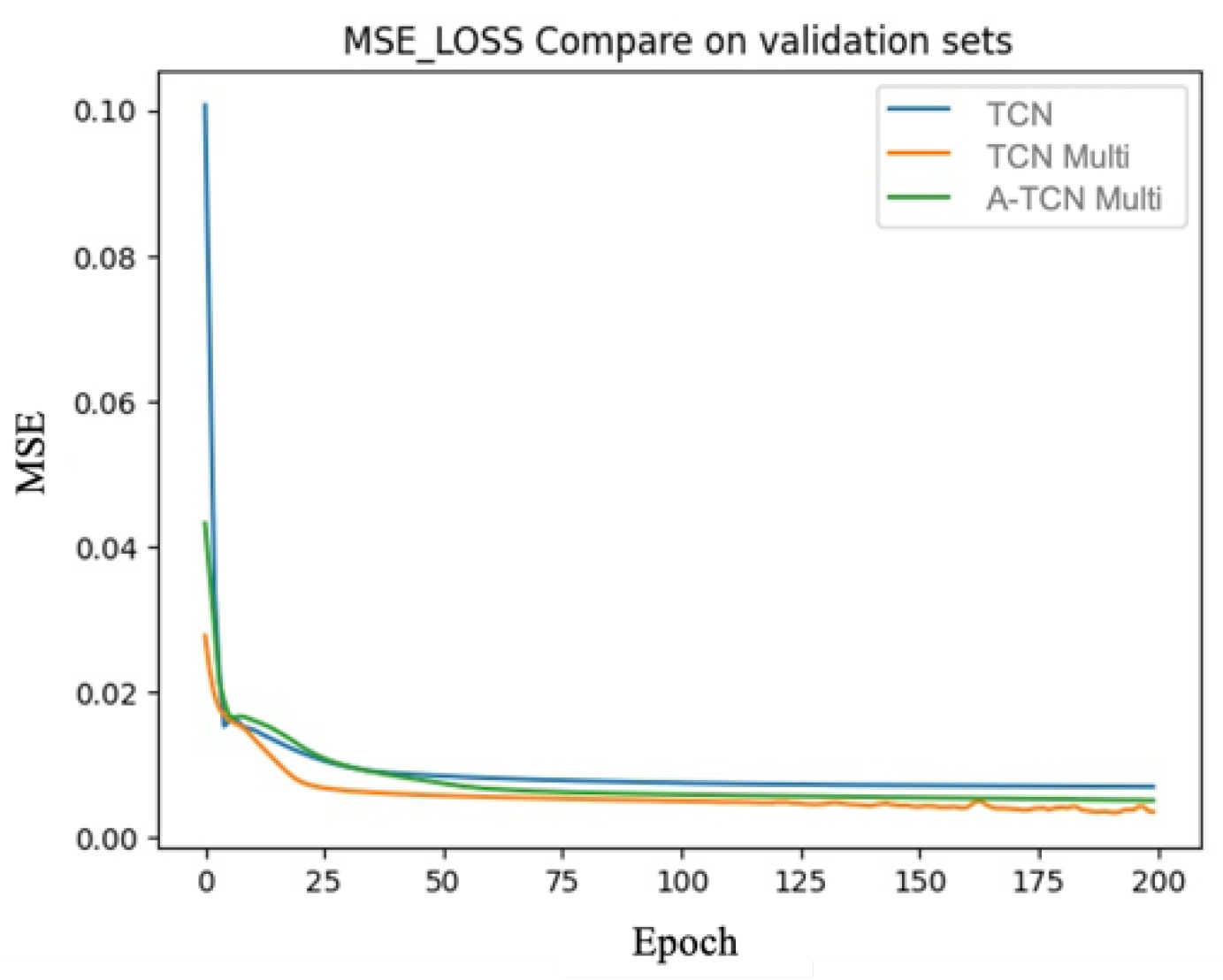
| Method | MSE |
|---|---|
| TCN with univariate input | 0.0083 |
| TCN with multivariate input | 0.0079 |
| A-TCN with multivariate input | 0.0061 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, K.; Wan, Z.; Zhang, Y.; Cui, Z.; Zhang, Z.; Jiang, C.; Zhang, F. Intelligent Short-Term Multiscale Prediction of Parking Space Availability Using an Attention-Enhanced Temporal Convolutional Network. ISPRS Int. J. Geo-Inf. 2023, 12, 208. https://doi.org/10.3390/ijgi12050208
Shang K, Wan Z, Zhang Y, Cui Z, Zhang Z, Jiang C, Zhang F. Intelligent Short-Term Multiscale Prediction of Parking Space Availability Using an Attention-Enhanced Temporal Convolutional Network. ISPRS International Journal of Geo-Information. 2023; 12(5):208. https://doi.org/10.3390/ijgi12050208
Chicago/Turabian StyleShang, Ke, Zeyu Wan, Yulin Zhang, Zhiwei Cui, Zihan Zhang, Chenchen Jiang, and Feizhou Zhang. 2023. "Intelligent Short-Term Multiscale Prediction of Parking Space Availability Using an Attention-Enhanced Temporal Convolutional Network" ISPRS International Journal of Geo-Information 12, no. 5: 208. https://doi.org/10.3390/ijgi12050208