1. Introduction
The stability of the power system is a complex issue and depends on many factors, which are increasingly difficult to maintain at the level required [
1,
2]. The reason for these events is disorders occurring in the network in the form of uncontrolled load changes, the stochastic generation of energy from renewable energy sources (RES), and overloads in distribution lines resulting from outdated, radial network topology, the environment (lightning), and limited equipment reliability. These factors cause the network to be treated as a nonlinear system, for which it is difficult to determine the optimal parameters of real-time operation. Therefore, it is advisable to use all methods available to monitor system operation, including the detection of faults and disturbances. This observation is often limited to the measurements of power grid parameters and the energy balance in a specific node of the system with specialized devices (e.g., PMU devices, SCADA system) by transmission and distribution system operators [
3]. A corresponding increase in the observability of the system is important in view of the growing number of new sources, including electric vehicles (EVs). When modifying the grid structure and implementing new elements, the additional extended system and regional services should also be developed/built, which are perhaps not yet technically necessary or implementable under the current regulatory framework, but should not be overlooked regarding the technical and economic analysis of system operation for future grid extensions. Those services could increasingly be provided partially or totally by electromobility in the medium- and long-term.
With the current generation of electric-powered vehicles, including battery electric vehicles (BEVs), plug-in hybrid electric vehicles (PHEVs), and hybrid electric vehicles (HEVs), the most popular in Germany are BEVs and PHEVs based on statistics for 2019 and 2020 [
4]. Detailed information on the design and differences between the mentioned vehicle variants can be found in the articles [
5,
6,
7], which describe in detail power sources, models, sustainability, and charging infrastructure. The most popular approach consists of buying and using a vehicle as a private means of transport, but products and services based on car-sharing are developing rapidly on the market, which is helping to make electromobility more competitive. All the car-sharing models used currently are described in detail in the article [
8], which also points out the existing trends in this sector and topics of new future research. In addition, the articles [
9,
10,
11] present the results of research and analyses concerning the development of EV rental services, including the intelligent deployment of stations [
11], field testing of the current solutions [
10] and the impact of the growing number of car-sharing services on mobility and environmental protection [
9]. This growth is due to government subsidies and benefits included in the new directives and allowing, among other things, EVs to use bus lanes [
12]. This affects the current attractiveness of EVs significantly and essentially affects the increasing number of rentals per year. Moreover, their price is relatively small and acceptable, allowing EVs to be rented for a period of a few to several minutes, which, in most cases, is sufficient to cover a specific range of distances under urban conditions. Additionally, emission-free driving contributes to the improvement of environmental standards and the quality of inhabitants’ life in the large cities where these services are provided. This also reduces the growing problem of traffic noise in large metropolises. All these factors are aiming for the sustainable use of electric vehicles in logistics management strategies, as presented in the article [
13].
Based on the studies available, similar analyses were carried out in the article [
14] where real data measurements were used to analyze current charging behavior in Sweden and Norway. The article focused on the utilization of public high-power charging stations to reduce the length of charging time for EVs, taking into account the vehicle’s energy demand. It tried to find a queuing model for a future fast charging infrastructure. The authors of [
15] also used the real measurements data of vehicles available to quantify correlations between the kinematic parameters of the vehicle and its energy consumption. Apart from using real data from vehicles, the authors did not consider the charging process. Another study that uses measurement data in the analysis of EV utilization in the power grid is [
16]. This article also used global positioning system (GPS) data, such as the vehicle’s driving profiles including charging and discharging data. The authors tried to determine the possibility of using vehicles in the process of peak-load shifting using their own control algorithms. No additional energy source was used to supply the vehicles in [
16], which is the case in this work. Moreover, the authors focused on the fleet of vehicles used not only by industry but also by individual customers with different driving styles. Different driving techniques also increase the energy consumption of the vehicle and therefore the energy taken from the grid. Detailed information on the economic aspects of different urban driving techniques can be found in [
17]. Another article where real measurement data of the EV fleet were used is [
18]. The authors determined the savings compared with conventional internal combustion engine (ICE) vehicles used on the same routes using GPS data and information on the charging stations available. Nevertheless, no information was included in this study about the impact of this fleet on the grid power flow or additional energy sources. Ji and Thal [
19] focused on the analysis of greenhouse gas emissions with plug-in hybrid and battery EVs based on logged trips. Similar to the previous case, local load growth was not considered. The element of RES was fully omitted.
The works in which the authors analyzed the cooperation of EVs with RES include [
20,
21,
22,
23,
24,
25]. In [
20], the author showed the advantages of the cooperation of EVs with wind generators, using the example of their application in Denmark. Similar to the following article, the author made use of measured data from an additional energy source installed in the system. However, the driving profiles of the vehicles or the grid load were not considered, and the utilization of the vehicles was limited to the regulation of energy generation from wind farms. A similar approach was presented in [
21], where the authors used measured data obtained from a photovoltaic farm and real energy demand data in the urban residential area in their simulation. They proposed two strategies to control EVs for peak shaving. In this case, the modeling of vehicle operation including discharging and charging was done according to the algorithm adopted and focused on determining the annual costs of battery degradation, energy costs, and revenue in relation to parameters such as the maximum depth of discharge. In the article [
22], the authors performed a similar analysis using historical metering data. Nevertheless, in the article different types of electric vehicles (PHEVs and BEVs) are used and a larger number of additional energy sources. There was no focus on economic analysis related to electricity trading. Similar for the paper [
23], in the paper [
24], the authors proposed a control system for vehicle charging process to reduce the negative uncontrolled impact on the power grid. They used real-time measurements for energy and PV installations for this purpose. The electric cars used in the analysis had a random value of the SOC level and the start time of the charging process according to the adopted algorithm, unlike here, where the charging time was strictly determined by the GPS data, for which the vehicle was actually parked and could be physically connected to the charging station. In the paper [
25], a similar problem of integrating electric vehicles into the electricity grid and reducing their impact on the grid when cooperating with PV sources was presented. In this paper, the authors used 1-min data to develop the analysis results. However, the authors used models based on Markov transition matrices and probability theory to create the input data, unlike in this case, where measured and GPS data of vehicles were used as inputs. Nevertheless, many scientific articles describe the potential use of EVs extensively in a distribution network [
26]. One of the fields of application is the energy distribution sector. The deployment of vehicles in smart grids has often been analyzed to increase efficiency and reduce disruptions in the power grid, as an increase in their number and uncontrolled operation may contribute to reducing the flexibility and stability of the distribution network [
27]. Consequently, various analyses, such as optimal solutions for charging management [
28], are being carried out to counteract this effect and identify the potential benefits of such use of EVs. In [
29], the authors indicated the real benefits of cooperation between EVs, power system operators, and energy producers. Similar relationships and conclusions were presented in [
30], which also included energy management in micro-grids. In addition, EVs equipped with rechargeable batteries, serving primarily as a means of transport, may, based on tests, be used as a specialized emergency energy source. The work on such a solution can be found in [
31], where a real-life military application of a microgrid system based on vehicle-to-grid/vehicle-to-vehicle (V2G-V2V) was described.
V2G systems can be developed due to the increase in the number of electric vehicles on the market. Research on these systems is also possible due to the intensified development of car-sharing offers, which can be observed in many cities in Europe, and which was described by Sprei et al. [
32] with the example of 12 cities in Europe and the United States. Furthermore, common car-sharing systems were described, among others, by Schmöller et al. [
33] on the example of Munich and Berlin, for which data of a German free-floating carsharing system was used. Similar analyses were presented by Campisi et al. [
34] in Italy, Becker et al. [
35] in Switzerland, and Vine and Polak [
36] in England. The significant participation of electric vehicles in car-sharing has a horizontal effect on the environment by reducing emissions [
37,
38] and EVs’ social aspects as presented in the article [
39].
The cooperation of new energy sources cannot take place in an uncontrolled way and, therefore, appropriate communication standards have been used in this area [
40] for the secure exchange of data between participants. In the case of large systems consisting of EV fleets, energy management, communication, and appropriate control systems play a decisive role in the stable implementation of the V2G strategy. In [
41], the authors indicate the tasks that such a system should fulfill to be able to perform the assumed functions, and point out the necessity of modularization and increasing the number of possible communication methods. The latest protocol, which is being developed for the need to standardize communication between the EV, the charging station, and the system operator, is the ISO 15118 standard, which was described in [
42]. Together with the IEC 61851 charging standard, which has been prepared for EVs and is described in [
43], it complements it with elements of secure, encrypted communication allowing bidirectional energy exchange and, thus, realization of the V2G model. Moreover, in [
44], the authors constructed their own charging system and carried out tests of the system functioning according to the IEC 61581 and ISO 15118 communication standard. These standards are currently being implemented by all leading automotive manufacturers.
Another aspect that was omitted in this article is the impact of the charging process on the quality of the electricity. However, this aspect is also a popular research topic worldwide. The large integration of electronic power devices both in the vehicle itself or the charging station can lead to voltage and current distortions. Examples of such deformations can be observed in [
45,
46]. In [
47], authors not only presented the negative impact of vehicles and the potential interferences that can be generated but also proposed possible actions to reduce the occurrence of these interferences. Similarly, in [
48], the authors presented a solution based on the utilization of EVs to regulate the voltage in the system with appropriate control strategies.
Furthermore, intensive utilization of EVs is associated with the degradation of the battery cells and acceleration of the aging processes, which are linked with the deterioration of user comfort. Analyses are often carried out using real measurement data, and models as in [
49,
50] are created with the purpose of determining the phenomena affecting the battery use in the V2G operations resulting from the construction and technology used. These studies most often show a deterioration in the properties of the storage facilities due to the increased frequency of the charging and discharging process under various conditions. In [
51], the life of batteries used in vehicles has been estimated, based on different driving profiles and charging methods during the provision of system services within the Vehicle-to-Grid strategy. In [
52], the authors identified negative effects resulting from calendar aging on capacity loss, resistance increase, and rate capability based on the Vehicle-to-Grid and Grid-to-Vehicle strategies adopted. Similar analyses can also show scientific research which presents a small impact of Vehicle-to-Grid strategies on battery capacity with appropriate control algorithms [
53]. Aging processes are also directly related to additional costs, the analysis of which was carried out, inter alia, in the [
54,
55]. The issue of cell wear and battery lifetime is not covered in this article. In reaction to the occurrence of undesired events during the charging of vehicle batteries, appropriate methods and control algorithms are being developed. In [
56], the authors proposed a method allowing electric vehicles to be charged in temporary load valleys, thus limiting the impact of vehicles on increasing energy demand. The methodology presented was studied for different locations (home, public buildings) and for different numbers of vehicles (low, medium, and high electric vehicle penetration). In turn, Iacobucci et al. [
57] proposed a practical approach to optimize the operation of shared autonomous electric vehicles including smart charging based on dynamic electricity prices. Another global approach to the problem of cooperation between electric vehicles and energy system was presented by Wulff et al. [
58], where he presented smart control implementations for 9 million EVs in Germany in 2030. The authors show that peak load can be reduced from 3 to 5% depending on the proposed charging solution for EVs.
According to the European Commission’s proposal, the sale of diesel cars will be stopped from 2030 [
59]. Similar measures will lead to a transformation in the transport sector. Companies which have so far used classic engines in their fleet will increasingly opt for solutions which do not conflict with EU regulations. This growth will be associated with an increase in energy demand. The work is aimed at investors, planners, and designers, with the aim of pointing out the need to take the extra measures into account when planning the construction of new company headquarters, which are also investing in various types of renewable energy sources.
The current work includes elements of technical analysis allowing one to identify the potential of an EV fleet composed of 60 battery electric vehicles. An attempt was made to determine the real impact of replacing traditional ICE vehicles with electric ones for a medium-sized company. The study observes the changes in energy demand that can occur with this replacement.
The energy consumption of the EVs was based on GPS data of traditional ICE vehicles currently used for transport services in Germany. Based on this data, the theoretical fuel consumption provided by the manufacturer was compared with the real consumption taken from the measured data (amount of fuel used in l) of a fleet of 60 tested vehicles. The driving profiles were compiled using GPS data, and energy usage for the EV was obtained by calculation. Furthermore, the intervals during which the batteries would be discharged due to driving were taken into account, as well as charging at designated possible periods during the stopover on the company premises according to the data recorded. Both charging and discharging profiles were determined based on assumptions regarding the charging power available and vehicle energy demand per km. The aim of this work was to analyze the change of the fleet of traditional ICE vehicles to EVs within a given enterprise. The increase in electricity consumption and constantly rising prices of electricity on the market force enterprises to seek appropriate solutions to reduce costs and energy usage and simultaneously increase their independence from energy supplies. In addition, some of the specialized companies make extensive use of vehicles that provide services in the framework of which they carry out specific tasks and cover similar routes with a known frequency. On this basis, a model was analyzed based on the use of historical GPS data of the journeys of ICE vehicles, the potential impact of PV electricity generation, and the daily energy demand of the company’s facility. The studies present the potential for the use of the EV fleet in industrial transport and the charging requirements for the group of vehicles selected. In addition, it was shown that electrification of the automotive sector will increase the instantaneous energy demand, forcing the integration of renewable energy sources in the project design of new installations by developers.
The article is organized as follows:
Section 2 presents the current state of the charging station infrastructure in Europe and the system services that this infrastructure could provide.
Section 3 defines the assumptions and their justification and presents the calculation process for the model of the EV fleet created.
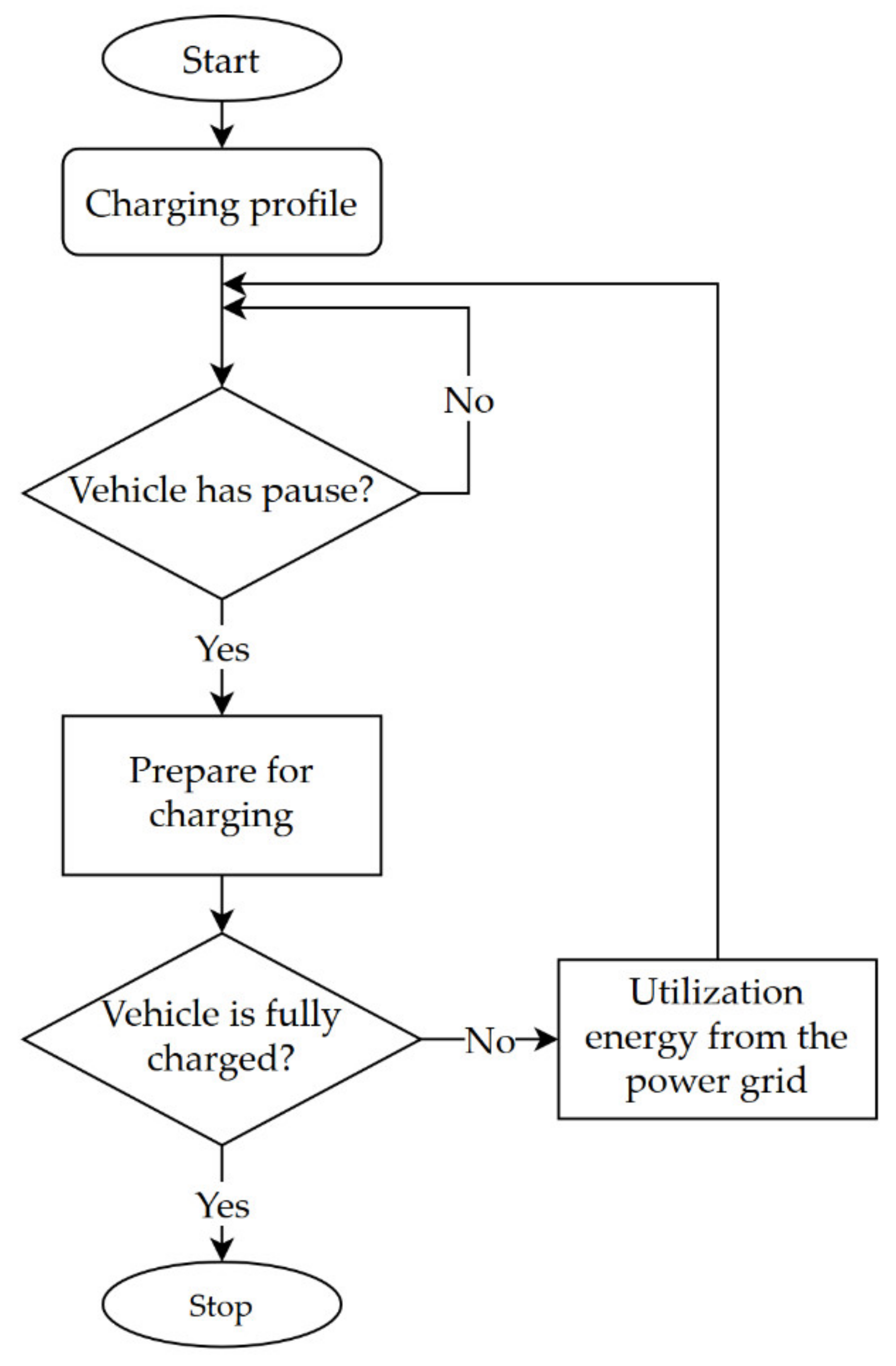
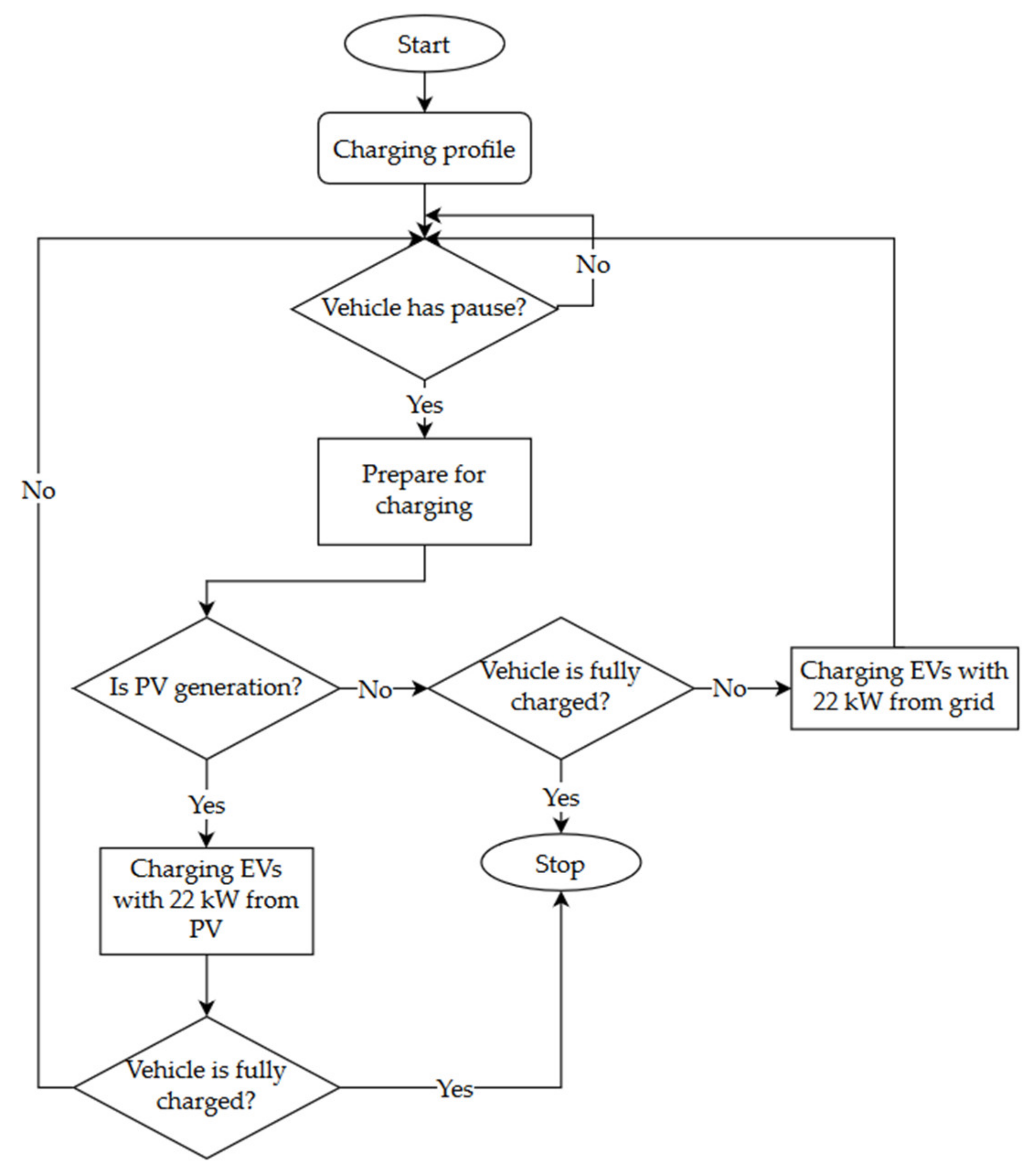
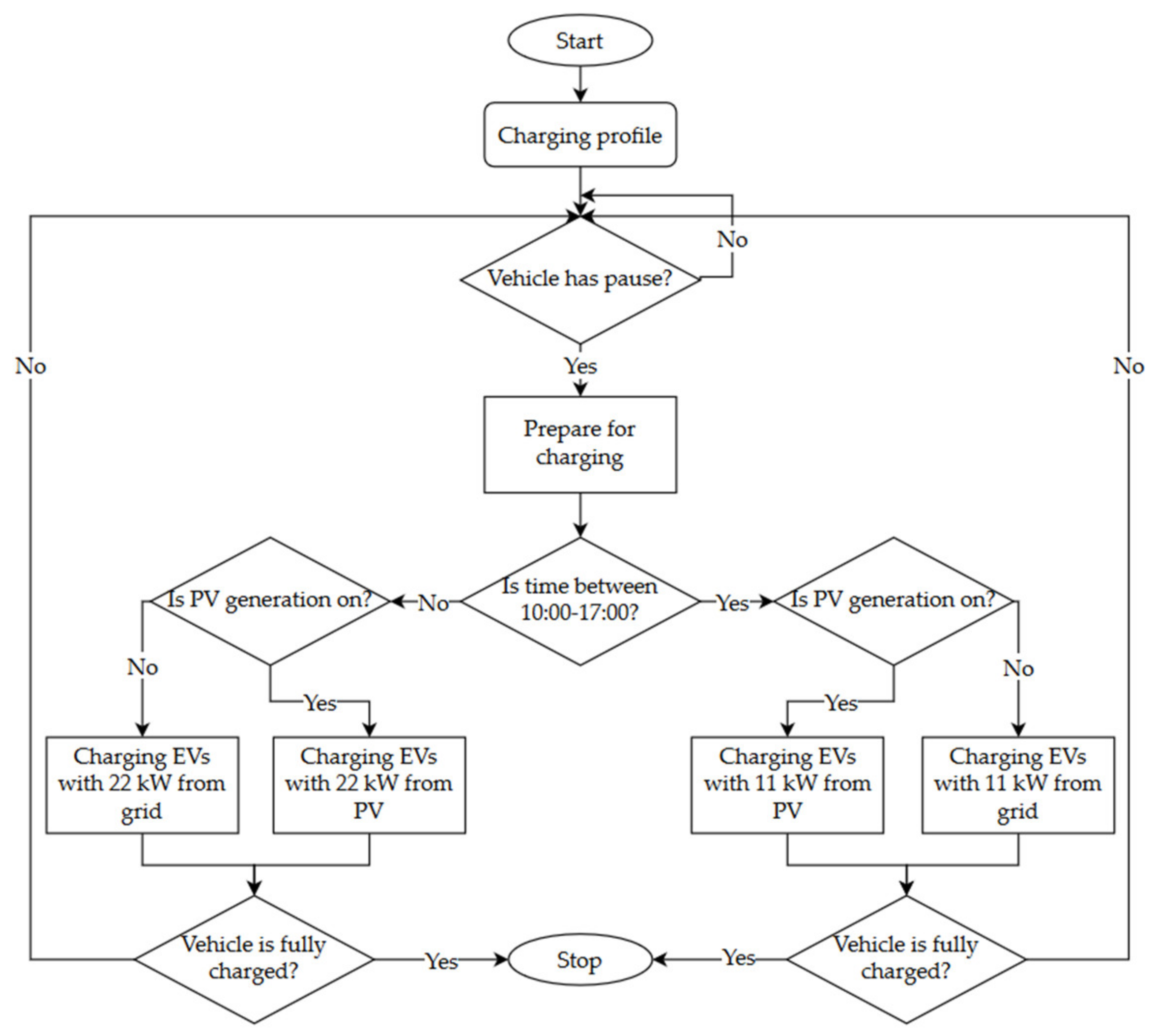
Section 4 defines the control algorithm that manages the vehicle charging process in the scenario under analysis.
Section 5 looks at the case study. Finally,
Section 6 presents the results and discussion from the work conducted. Conclusions are presented in the
Section 7.
2. Evolution and Application Potential of Electromobility
Electromobility does not only describe a group of EVs but also all the interconnections and integration infrastructure in the power grid as a framework for safe and reliable cooperation. The charging stations are used as physical connection for the EV to the grid.
Common charging methods and charging times for electric cars are presented in
Table 1.
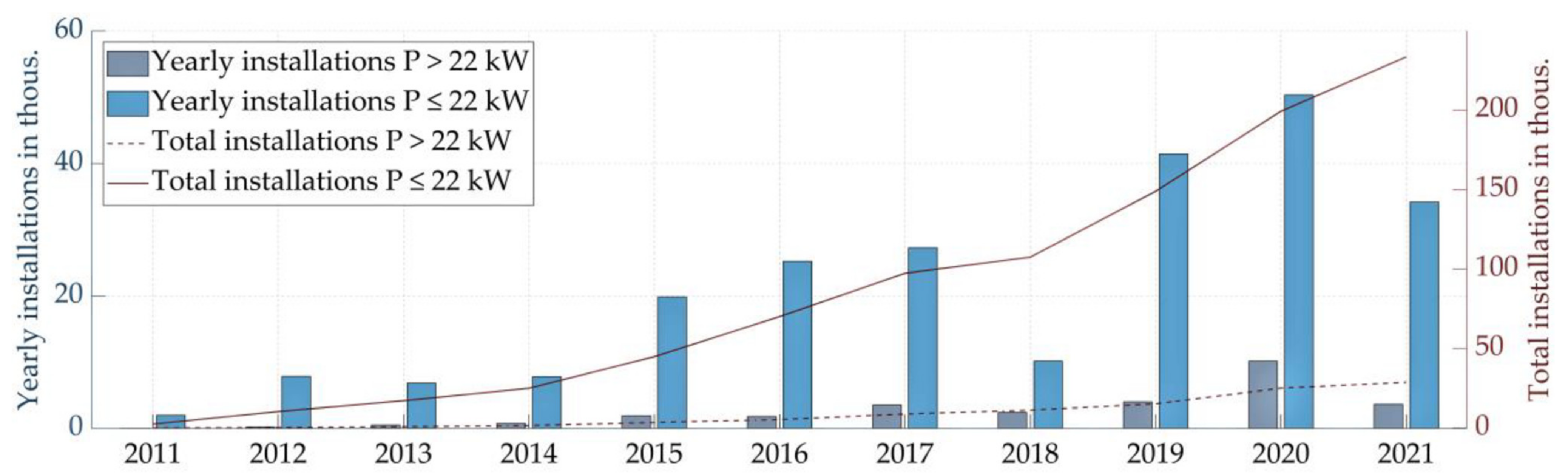
This poses an increasing challenge to the current grid infrastructure as the current building and commercial object where connections have been designed for specific power values with a minimum reserve resulting from the connection plans. In the past, the possibility of increasing the load on the grid as a result of new vehicle charging points had not been considered. This results in some network elements which are now exposed to overloading of the distribution lines. Despite the difficulties of integrating EVs into the grid, their number is steadily increasing. The number of new public charging points have been rising in recent years, as shown in
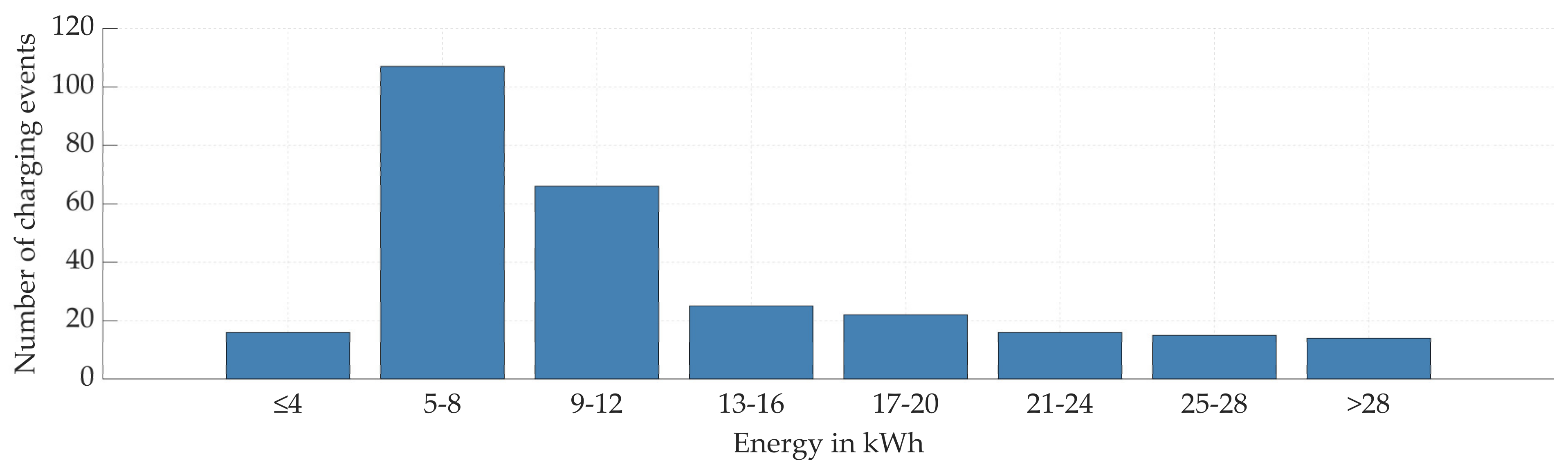
Figure 1 and
Figure 2.
Figure 1 also forecasts the growth in the number of charging stations in 2021.
Figure 2 represents the number of times the vehicle has been charged in the specified energy range in one year. The development of EVs will eventually require the power grid to be adapted to the needs of electromobility.
Based on the charts attached, vehicles were most often charged between 7:00 and 9:00 in the IFF Fraunhofer charging station, where the charging process took from one to three hours and allowed the battery to be charged with an energy value from 5 to 12 kWh. In the case of the analysis of the optimal distribution of vehicle charging stations, proper interpretation of behavioral patterns is required which contribute significantly to the correct determination of their number, thus preventing oversizing and reducing infrastructure development costs. The EVs, together with their power electronics and batteries, should be capable of converting energy, including extracting it from or transferring it back to the grid. They are increasingly not treated as electricity consumers but prosumer solutions. Therefore, their connection to the grid is standardized according to technical connection rules for low voltage (VDE-AR-N 410) [
62], which define the rules of cooperation between the vehicle and the grid, while maintaining the relevant parameters and utility profiles of the electric grid. In theory, because of this and the relatively high power and performance values of the systems, it is possible to provide classic system services, such as frequency maintenance (active power) and local voltage stabilization (reactive power), but it is also possible to use their potential for future system services: load management, phase balancing, energy quality improvement, or under exceptional circumstances, short circuit power supply. A detailed description is presented in
Table 2.
It should be noted that, regardless of the infrastructure and operation mode, the analysis and development of the model must be examined separately and in detail, as different factors can play a decisive role in this area. Some models that consider future network services may not be able to predict certain technical and regulatory aspects that could change in the future. In addition, particular attention should be paid not only to further trends and forecasts concerning the technical and economic development of systems and components but also to user requirements and behavior, as this is a costly technology that will continue to be subject to a medium- to rather long-term return on investment today. Some assumptions can be made, such as equipment costs may decrease with technology development, while approval/planning and installation costs will remain roughly the same. Other parameters and criteria are relevant for the development of a business model, for example, for suppliers or operators of charging infrastructure, such as the number of charging stations in the city districts, periods of use, charging services or electricity purchase costs. These, in turn, are currently still difficult to predict.
Finally, in the future, electric vehicles will be a crucial element in the power distribution. Their evolution, and in particular the development of electrochemical storage technologies, will increase battery capacity and battery lifetime, which will make it possible, in the long term, to use them for grid services (
Table 2). At the moment, this is difficult to achieve due to insufficiently developed communication and data transfer technology between system operators and charging stations, but it continues to be vigorously developed.
3. Modeling EVs–Consumption and Driving Profiles
The analyses were carried out using the Matlab R2020a software environment and based on measurement data consisting of
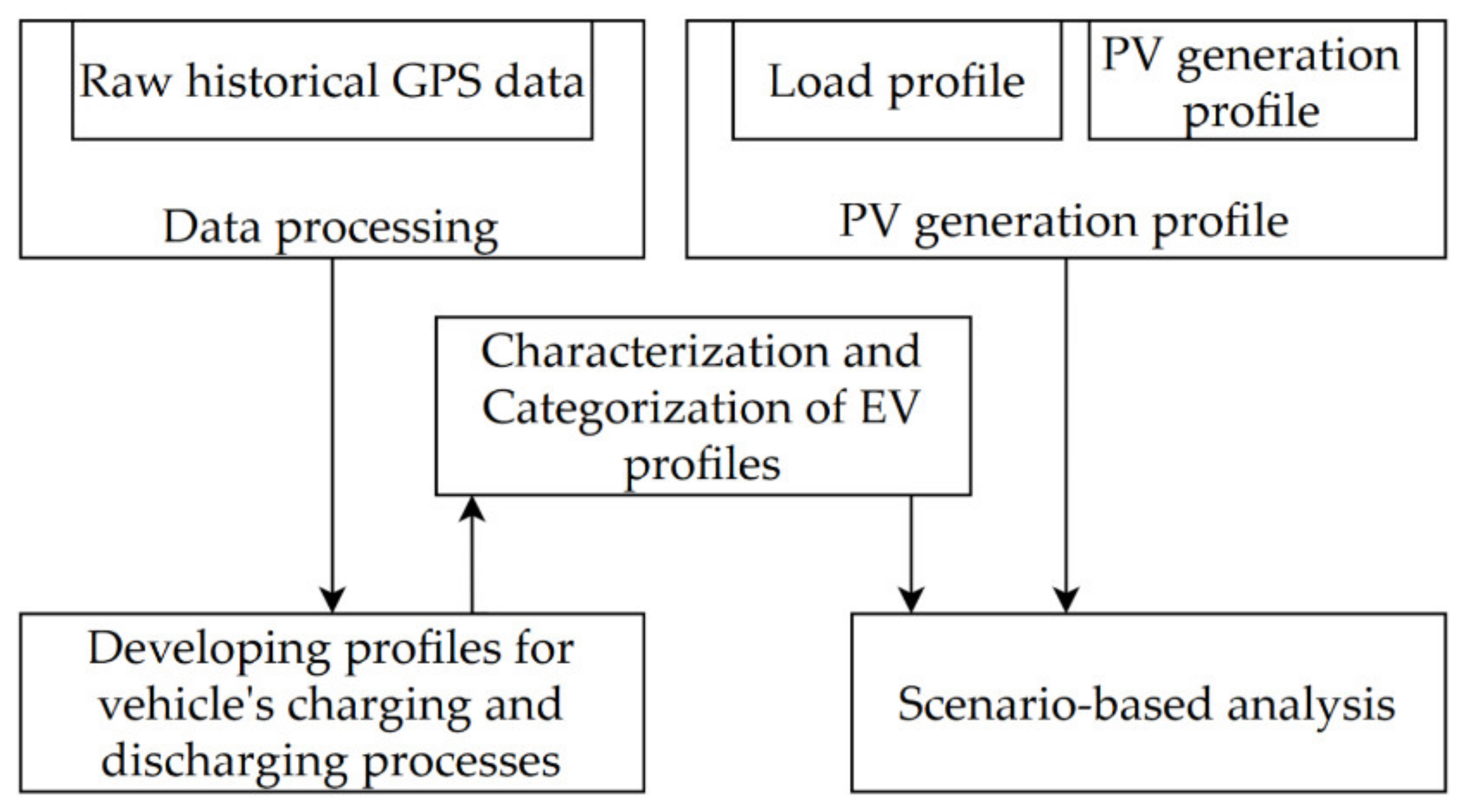
n = 604,800 points, which include weekly profiles of the fleet of diesel vehicles specializing in the provision of transport services. The GPS data used from “DAKO-Key” recorders placed in 60 light commercial vehicles (LCV) monitored the route traveled during the day and logging the selected parameters at a 1 min. frequency. The GPS recorders enabled 60 cars to be identified within one week in the process of delivering products in Halle/Saale in the southern part of the region of Saxony-Anhalt, Germany. They were used as input to simulate the use of EVs equipped with a battery pack in the scenarios under consideration. The calculations also used load measurements recorded by Janitza UMG 604-Pro and a power generation profile from the PV farm based on Siemens 7KM PAC4200 in September, 2018. A simplified model of the analysis is presented in
Figure 3.
This modeling method made it possible to determine certain characteristics values characterizing each individual journey, which made it possible to determine the potential demand for electricity or the compartments in which the vehicles can be recharged to the required level. The following assumptions were made in the calculation case chosen and they are presented in Equation (1):
where
is the
i-th EV’s energy consumption for
j-th time stamp,
is the difference in the distance traveled in consecutive time samples,
is the value of the power that the
i-th vehicle is charged for time
j,
minimum parking time required,
the geographical coordinates of the
i-th vehicle in the
j-th time sample,
are the geographical coordinates of the company address, and
the battery energy usage.
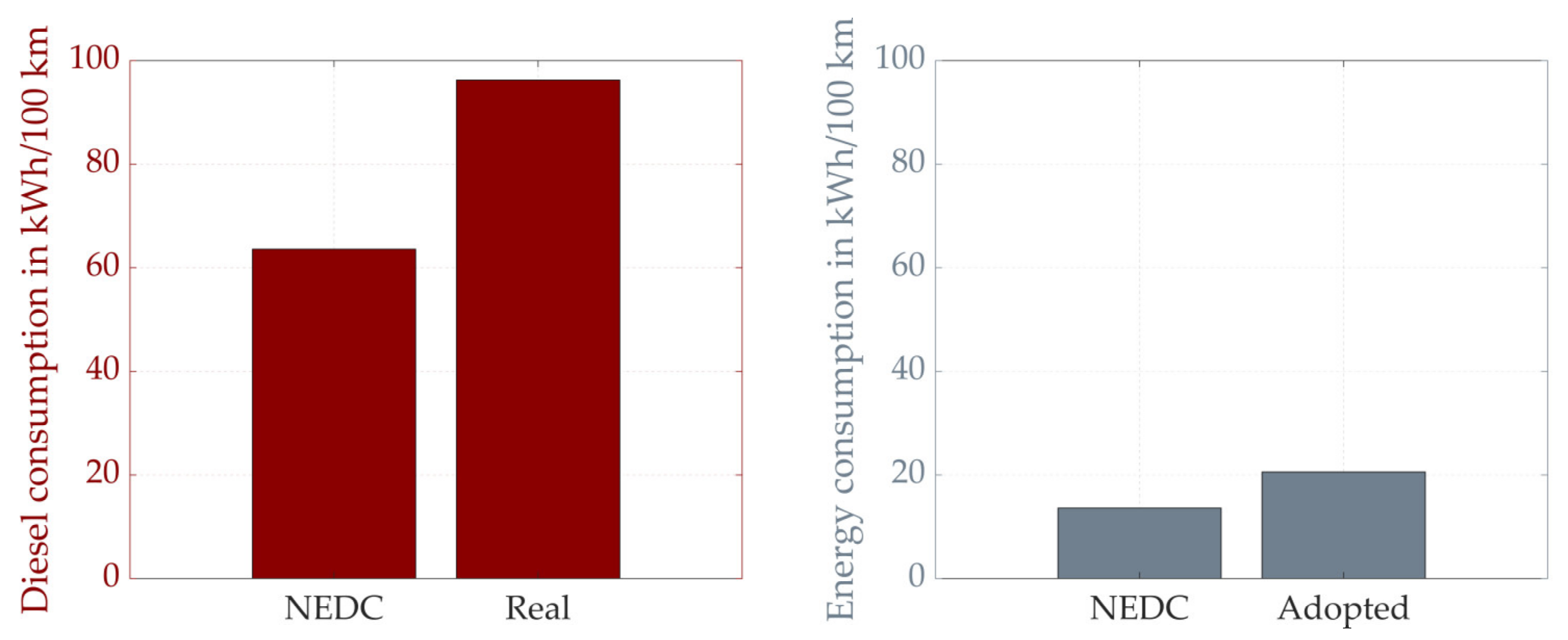
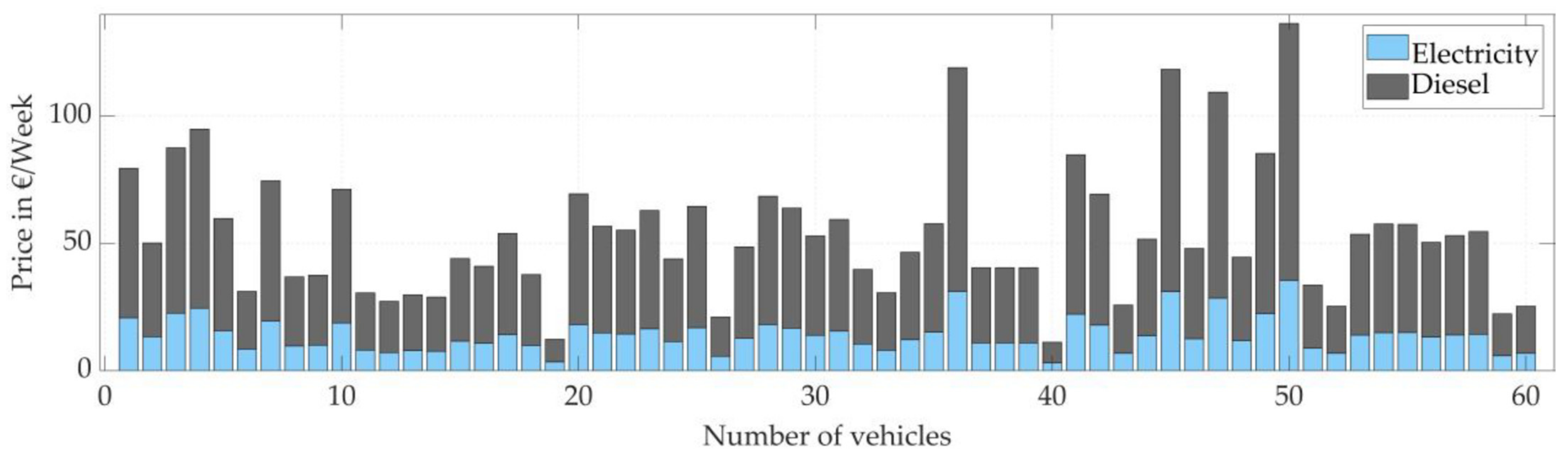
Furthermore, based on the driving profiles calculated and the time during which the vehicle remains in parking place, the electricity consumption profiles during driving and the charging profiles for which the corresponding values in kWh have been adopted. During the vehicle trips, it was not possible to measure the vehicle cargo, so these data were not used to determine the electric energy consumption. This value was determined on the basis of The New European Driving Cycle (NEDC) from which the manufacturer determined the energy consumption of the vehicle. The specific energy consumption for this study was calculated based on real fuel consumption from measurements compared with NEDC standard consumption (
Figure 4). In this case, a 51.3% increase in consumption was measured in comparison with the manufacturer’s declaration. The scaling factor was defined, and a further electrical consumption specification was amplified accordingly. The simulation considers the energy consumption declared by the manufacturer of the Nissan e-NV200 [
63], which is 136 Wh/km (NEDC), and for which the consumption value has been increased to 206 Wh/km by calculated the scaling factor.
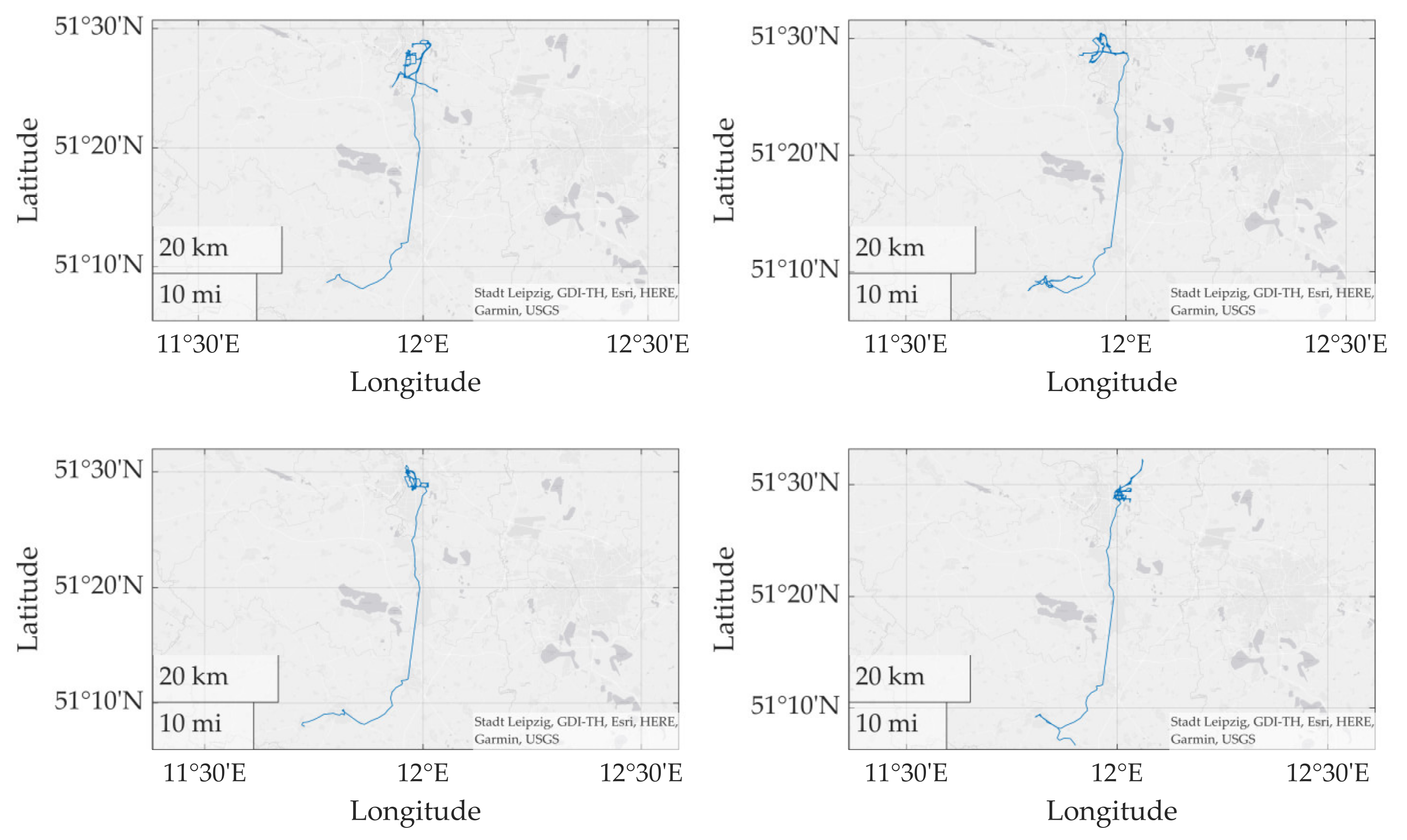
Furthermore, based on GPS data and the assumptions made, the daily energy consumption of the vehicle during the departure has been calculated according to Equation (2). Equation (3) shows the value of the charging power at the possible time intervals selected. Examples of the vehicle routes are presented by GPS data, and they are shown in
Figure 5.
where
is the change in charging power resulting from the duration of the charging process in the station.
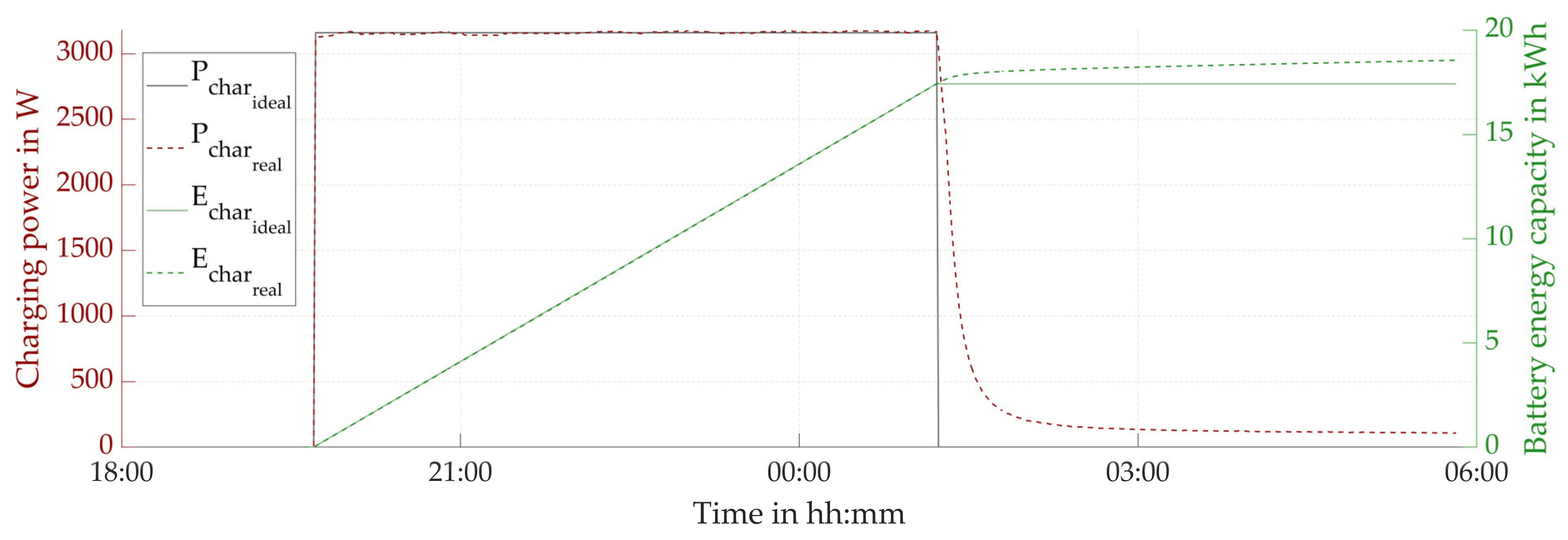
A simplified model was adopted for which the power value changes in steps to create charging profiles for EVs. The simplification adopted does not affect the simulation results obtained significantly, and the average relative error of the supplied energy E determined for the whole recorded charging process from
Figure 6 does not exceed σE = 2.19%.
Figure 6 was developed on the basis of the same measurements, which were also partly used to analyze harmonics during vehicle charging in article [
64].
The simplification used in
Figure 6 was implemented in a simulation for which the time intervals were determined in which the vehicle battery can be charged using the default 22 kW charger. The charging power is controlled depending on the algorithms applied, which are described in
Section 5.
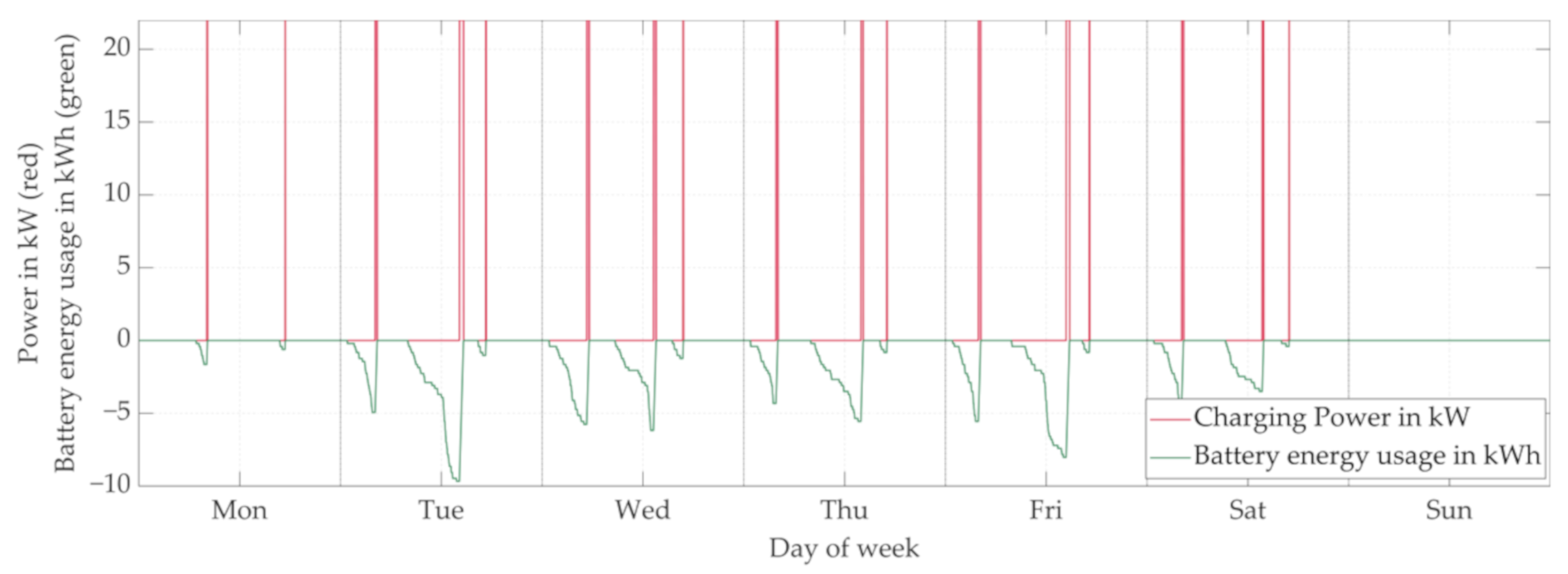
Figure 7 shows a selected one-week profile of one EV including the time windows available in which the vehicle has completed its trip and is recharged to the required value. Similar profiles were developed for the entire fleet analyzed.



 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}