Reactive Power and Current Harmonic Control Using a Dual Hybrid Power Filter for Unbalanced Non-Linear Loads

 , , and
, , and
Abstract
:1. Introduction
- In order to mitigate all the current harmonic components generated by unbalanced non-linear loads, a great number of passive filters must be used for each harmonic to be compensated.
- Some problems related to the peak resonance of the filter with the electrical grid, a phenomenon known as harmonic-amplifying, can occur [7,8,9]. This phenomenon happens because the passive filters drain the current harmonics not only from the local non-linear loads but also from other non-linear loads connected to the grid.
- Depending on the power level, passive filters are bulkier and heavier and present inferior performance when compared with active solutions, such as active power filters and hybrid power filters.
2. Dual Hybrid Power Filter
2.1. Nine-Switch Inverter Analysis
2.2. Passive Filter Analysis
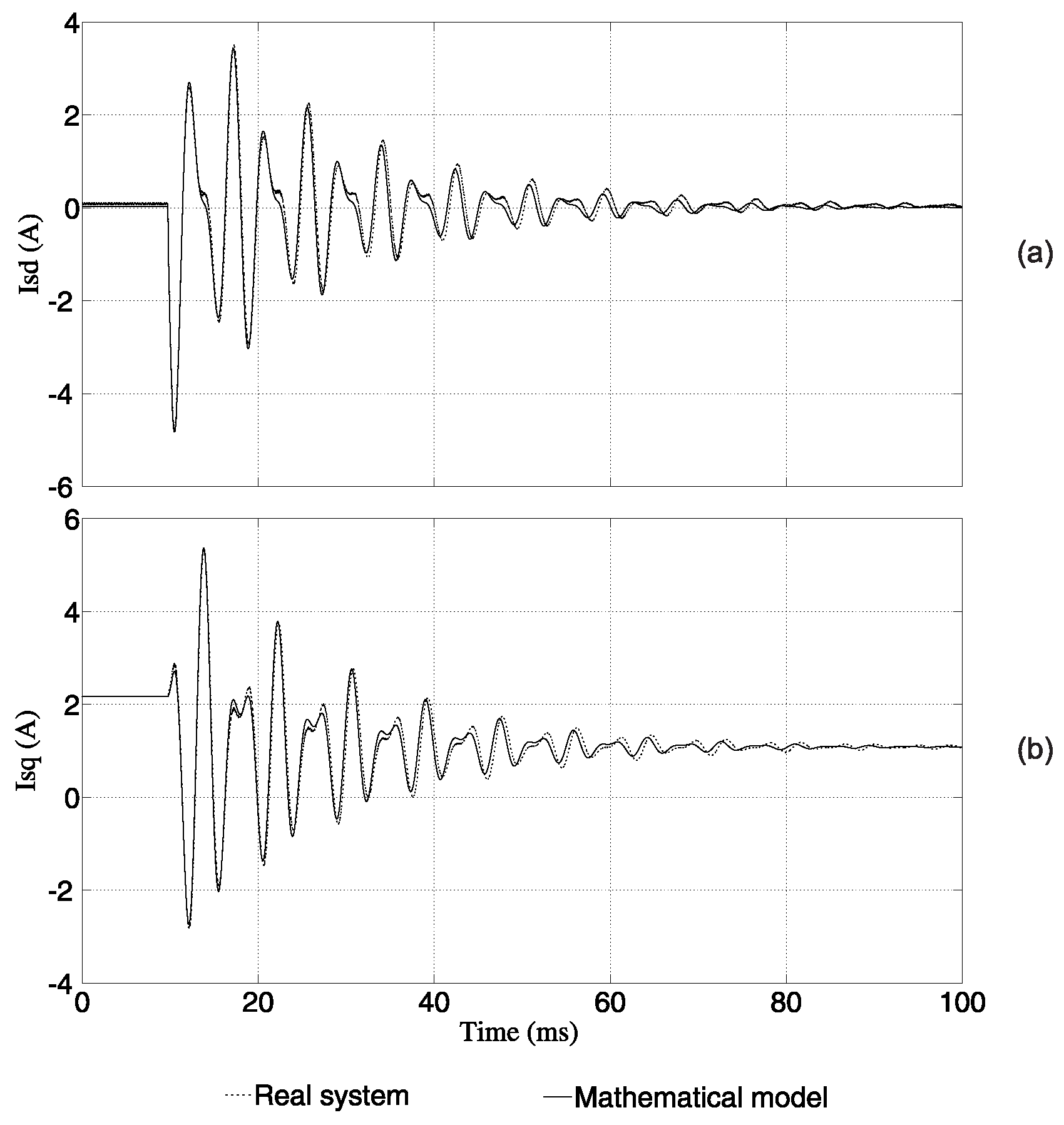
3. Dual Hybrid Power Filter Mathematical Model for Reactive Power Control
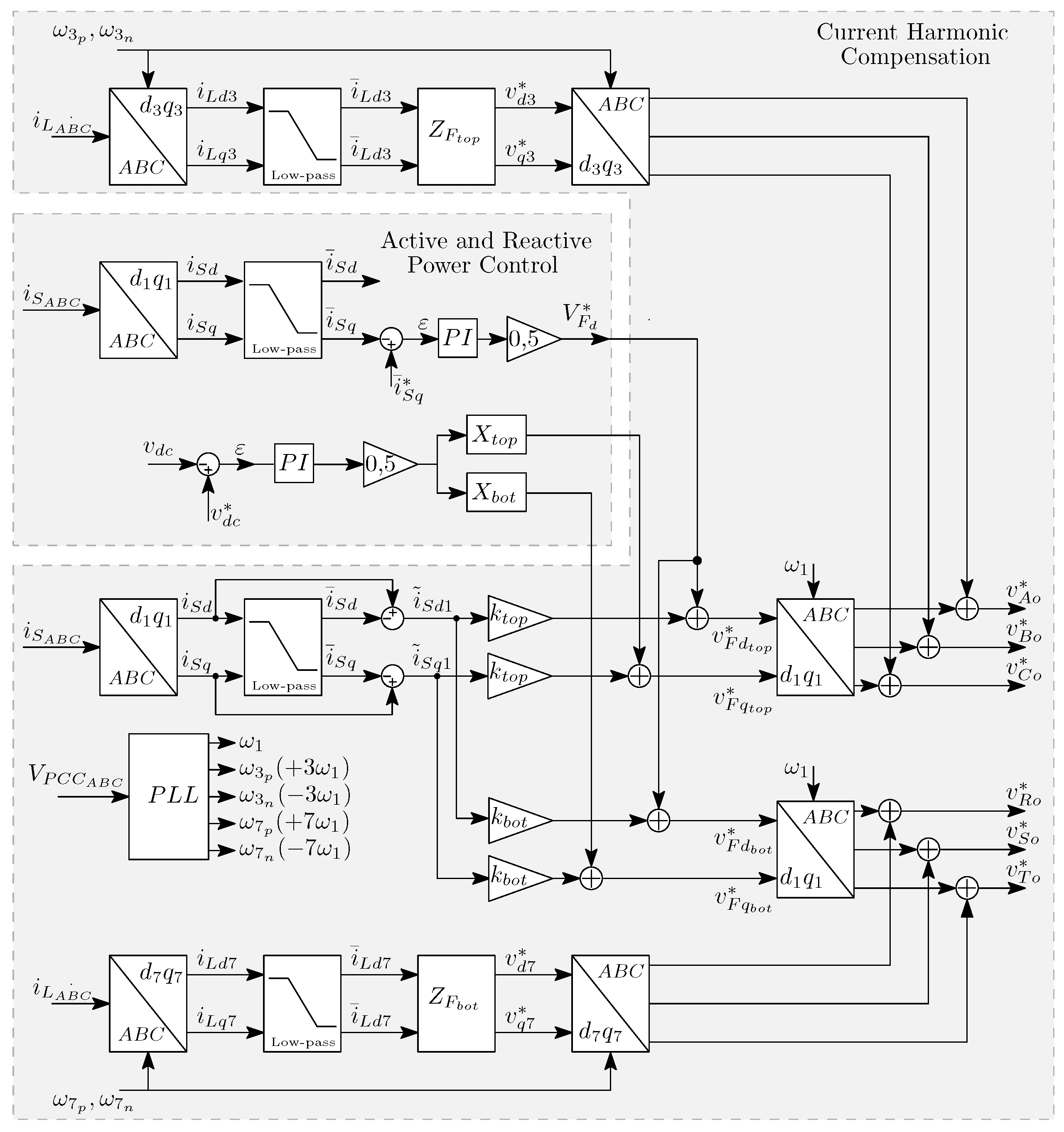
4. Hybrid Power Filter Control System
4.1. Active and Reactive Power Control
4.1.1. Reactive Power Control
4.1.2. Dc-Link Voltage Control
4.2. Current Harmonic Compensation
4.2.1. Feedback Control
4.2.2. Top and Bottom Feedforward Controls
5. Experimental Prototype
5.1. Reactive Power Compensation Performance
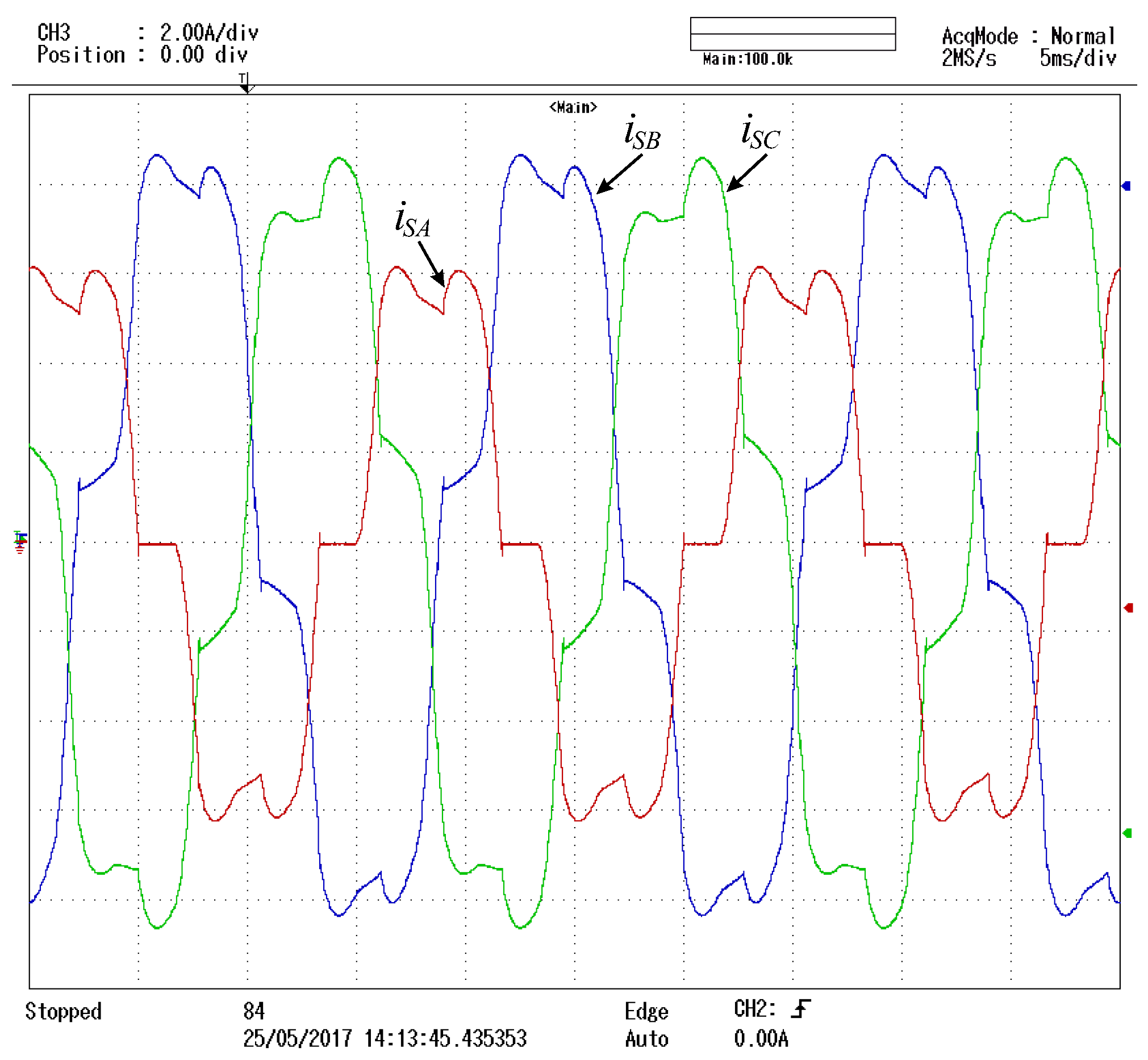
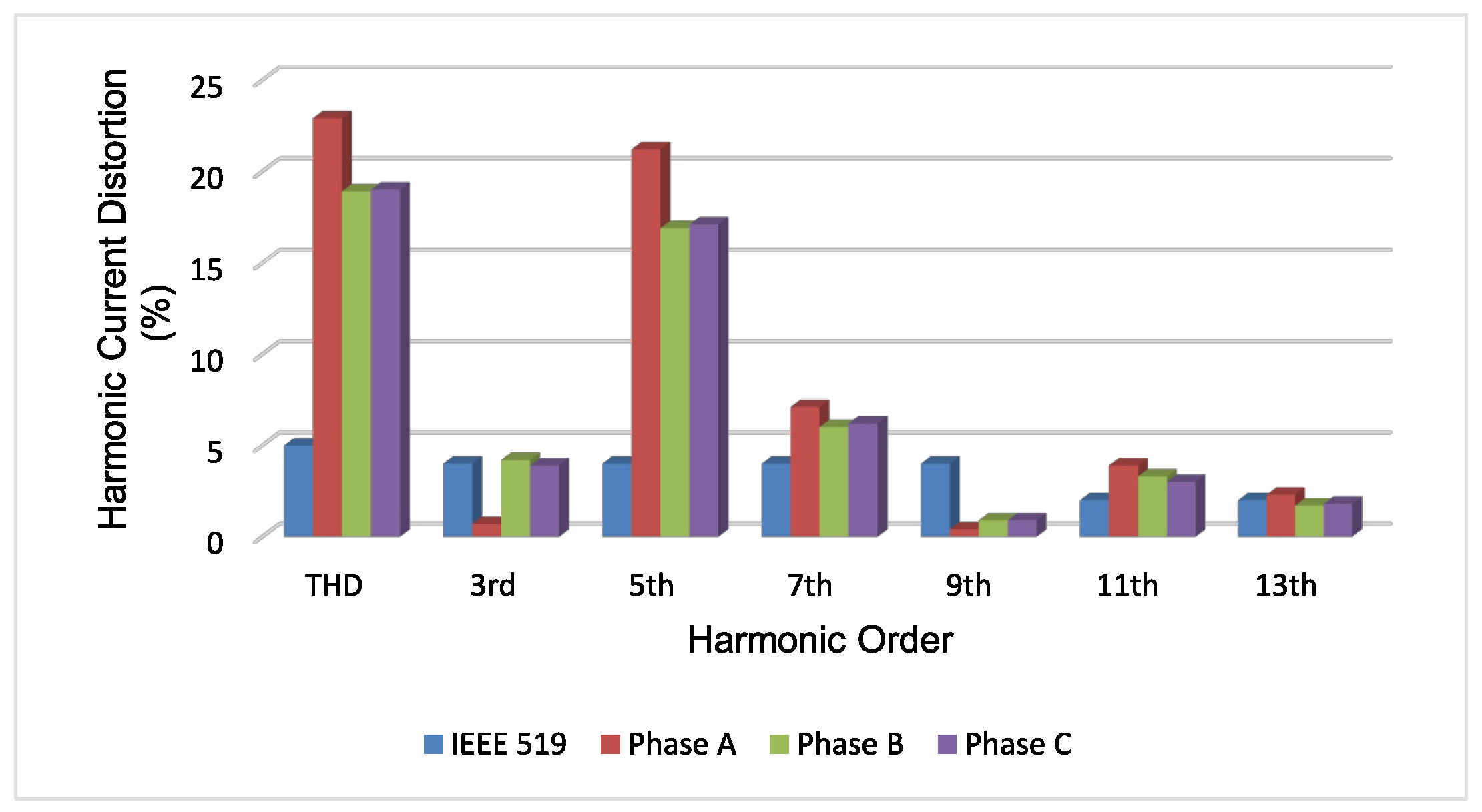
5.2. Current Harmonic Compensation Performance
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Jewell, W. Electrical power systems quality. IEEE Power Energy Mag. 2003, 99, 63–64. [Google Scholar] [CrossRef]
- Hingorani, N.G.; Gyugyi, L. Understanding FACTS Concepts and Technology of Flexible AC Transmission Systems; IEEE Press: Piscataway, NJ, USA, 2000; pp. 1–429. [Google Scholar]
- Conseil International des Grands Reseaux Electriques (CIGRE). Custom Power-State of the Art; CIGRE WG14.31; CIGRE: Paris, France, 2002; pp. 1–104. [Google Scholar]
- Institute of Electrical and Electronics Engineers (IEEE). IEEE Guide for Application of Power Electronics for Power Quality Improvement on Distribution Systems Rated 1 kV Through 38 kV; IEEE Standard 1409-2012; IEEE: New York, NY, USA, 2012; pp. 1–90. [Google Scholar]
- Hossain, E.; Tür, M.R.; Padmanaban, S.; Ay, S.; Khan, I. Analysis and Mitigation of Power Quality Issues in Distributed Generation Systems Using Custom Power Devices. IEEE Access 2018, 6, 16816–16833. [Google Scholar] [CrossRef]
- Rivas, D.; Moran, L.; Dixon, J.; Espinoza, J. Improving passive filter compensation performance with active techniques. IEEE Trans. Ind. Electron. 2003, 50, 161–170. [Google Scholar] [CrossRef]
- Fujita, H.; Akagi, H. A practical approach to harmonic compensation in power systems - series connection of passive and active filters. IEEE Trans. Ind. Appl. 1991, 27, 1020–1025. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Jouanne, A. A comparison and assessment of hybrid filter topologies and control algorithms. In Proceedings of the IEEE 32nd Annual Power Electronics Specialists Conference, Vancouver, BC, Canada, 17–21 June 2001; pp. 565–570. [Google Scholar]
- Srianthumrong, S.; Akagi, H. A medium-voltage transformerless AC/DC power conversion system consisting of a diode rectifier and a shunt hybrid filter. IEEE Trans. Ind. Appl. 2003, 39, 874–882. [Google Scholar] [CrossRef]
- Limongi, L.R.; Roiu, D.; Bojoi, R.; Tenconi, A. Analysis of active power filters operating with unbalanced loads. In Proceedings of the IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 584–591. [Google Scholar]
- Ribeiro, R.L.A.; Azevedo, C.C.; Sousa, R.M. A robust adaptive control strategy of active power filters for power-factor correction, harmonic compensation, and balancing of nonlinear loads. IEEE Trans. Power Electron. 2012, 27, 718–730. [Google Scholar] [CrossRef]
- Furtado, P.C.S.; Rodrigues, M.C.B.P.; Braga, H.A.C.; Barbosa, P.G. Two-phase, three-wire shunt active power filter using the single-phase p-q theory. In Proceedings of the Brazilian Power Electronics Conference, Gramado, Brazil, 27–31 October 2013; pp. 1245–1250. [Google Scholar]
- Rahman, N.F.A.; Radzi, M.A.M.; Soh, A.C.; Mariun, N.; Rahim, N.A. Adaptive hybrid fuzzy-proportional plus crisp-integral current control algorithm for shunt active power filter operation. Energies 2016, 9, 737. [Google Scholar] [CrossRef]
- Monroy-Morales, J.L.; Campos-Gaona, D.; Hernández-Ángeles, M.; Peña-Alzola, R.; Guardado-Zavala, J.L. An active power filter based on a three-level inverter and 3D-SVPWM for selective harmonic and reactive compensation. Energies 2017, 10, 297. [Google Scholar] [CrossRef]
- Tan, K.-H.; Lin, F.-J.; Chen, J.-H. A three-phase four-leg inverter-based active power filter for unbalanced current compensation using a Petri probabilistic fuzzy neural network. Energies 2017, 10, 2005. [Google Scholar] [CrossRef]
- Hoon, Y.; Mohd Radzi, M.A.; Hassan, M.K.; Mailah, N.F. Control algorithms of shunt active power filter for harmonics mitigation: A review. Energies 2017, 10, 2038. [Google Scholar] [CrossRef]
- Peng, F.Z.; Akagi, H.; Nabae, A. A new approach to harmonic compensation in power systems—A combined system of shunt passive and series active filters. IEEE Trans. Ind. Appl. 1990, 26, 983–990. [Google Scholar] [CrossRef]
- Lam, C.S.; Wong, M.C. A novel b-shaped l-type transformerless hybrid active power filter in three-phase four-wire systems. In Proceedings of the 38th North American Power Symposium, Carbondale, IL, USA, 17–19 September 2006; pp. 235–241. [Google Scholar]
- Bhattacharya, A.; Chakraborty, C.; Bhattacharya, S. Parallel-connected shunt hybrid active power filters operating at different switching frequencies for improved performance. IEEE Trans. Ind. Electron. 2012, 59, 4007–4019. [Google Scholar] [CrossRef]
- Limongi, L.R.; Silva Filho, L.R.; Genu, L.G.B.; Bradaschia, F.; Cavalcanti, M.C. Transformerless hybrid power filter based on a six-switch two-leg inverter for improved harmonic compensation performance. IEEE Trans. Ind. Electron. 2015, 62, 40–51. [Google Scholar] [CrossRef]
- Luo, Z.; Su, M.; Yang, J.; Sun, Y.; Hou, X.; Guerrero, J.M. A repetitive control scheme aimed at compensating the 6k + 1 harmonics for a three-phase hybrid active filter. Energies 2016, 9, 787. [Google Scholar] [CrossRef]
- Tokiwa, A.; Yamada, H.; Tanaka, T.; Watanabe, M.; Shirai, M.; Teranishi, Y. New hybrid static VAR compensator with series active filter. Energies 2017, 10, 1617. [Google Scholar] [CrossRef]
- Corasaniti, V.F.; Barbieri, M.B.; Arnera, P.L. Hybrid active filter for reactive and harmonics compensation in a distribution network. IEEE Trans. Ind. Electron. 2009, 56, 670–677. [Google Scholar] [CrossRef]
- Salmeron, P.; Litran, S.P. A control strategy for hybrid power filter to compensate four-wires three-phase systems. IEEE Trans. Power Electron. 2010, 25, 1923–1931. [Google Scholar] [CrossRef]
- Asiminoaei, B.L.; Lascu, C.; Blaabjerg, F.; Boldea, I. Performance improvement of shunt active power filter with dual parallel topology. IEEE Trans. Power Electron. 2007, 22, 247–259. [Google Scholar] [CrossRef]
- Kim, G.-T.; Lipo, T.A. VSI-PWM rectifier/inverter system with a reduced switch count. IEEE Trans. Ind. Appl. 1996, 32, 1331–1337. [Google Scholar]
- Limongi, L.; Bradaschia, F.; Azevedo, G.M.S.; Genu, L.G.B.; Silva Filho, L.R. Dual hybrid power filter based on a nine-switch inverter. Electr. Power Syst. Res. 2014, 117, 154–162. [Google Scholar] [CrossRef]
- Liu, C.; Wu, B.; Zargari, N.R.; Xu, D.; Wang, J. A novel three-phase three-leg AC/AC converter using nine igbts. IEEE Trans. Power Electron. 2009, 24, 1151–1160. [Google Scholar]
- Institute of Electrical and Electronics Engineers (IEEE). IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power Systems; IEEE Standard 519-1992; IEEE: New York, NY, USA, 1993; pp. 1–112. [Google Scholar]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Instantaneous Reactive Power Compensators Comprising Switching Devices without Energy Storage Components. IEEE Trans. Ind. Appl. 1984, IA-20, 625–630. [Google Scholar] [CrossRef]
- Duesterhoeft, W.C.; Schulz, M.W.; Clarke, E. Determination of Instantaneous Currents and Voltages by Means of Alpha, Beta, and Zero Components. Trans. Am. Inst. Electr. Eng. 1951, 70, 1248–1255. [Google Scholar] [CrossRef]
- Park, R.H. Two-reaction theory of synchronous machines generalized method of analysis-part I. Trans. Am. Inst. Electr. Eng. 1929, 48, 716–727. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Sun, J.A. Robust Adaptive Control; PTR Prentice-Hall: Upper Saddle River, NJ, USA, 1996; pp. 803–813. ISBN 9780134391007. [Google Scholar]
- Ribeiro, R.L.A.; Rocha, T.O.A.; Sousa, R.M.; Santos, E.C.; Lima, A.M.N. A Robust DC-Link Voltage Control Strategy to Enhance the Performance of Shunt Active Power Filters Without Harmonic Detection Schemes. IEEE Trans. Ind. Electron. 2015, 62, 803–813. [Google Scholar] [CrossRef]
- Semikron IGBT Module SKM50GB12T4. Available online: https://www.semikron.com/dl/service-support/downloads/download/semikron-datasheet-skm50gb12t4-22892000/ (accessed on 25 May 2018).
- Semikron Gate Drive SKPC 22/2. Available online: http://astronix.biz/datasheets/SKPC22.PDF (accessed on 25 May 2018).
- Modular dSPACE System DS1005 Processor Board. Available online: https://www.dspace.com/shared/data/bkm/catalog2014_en/files/assets/basic-html/page332.html (accessed on 25 May 2018).
- dSPACE DS5101 Board PWM Generation. Available online: https://www.dspace.com/shared/data/pdf/2018/dSPACE_DS5101_Catalog2018.pdf (accessed on 25 May 2018).
- dSPACE DS2004 Board for A/D Conversion. Available online: https://www.dspace.com/shared/data/pdf/2018/dSPACE_DS2004_Catalog2018.pdf (accessed on 25 May 2018).
- dSPACE DS4002 Board for Digital I/O. Available online: https://www.dspace.com/shared/data/pdf/2018/dSPACE_DS4002_Catalog2018.pdf (accessed on 25 May 2018).
- YOKOGAWA DL850 ScopeCorder. Available online: https://cdn.tmi.yokogawa.com/BUDL850E-00EN.pdf (accessed on 25 May 2018).
- High-Speed 100 M/s, 12-Bit Isolation Module 720211. Available online: https://cdn.tmi.yokogawa.com/BUDL850E-01EN.pdf (accessed on 25 May 2018).
- Fluke 434-II Power Quality Analyzer. Available online: http://media.fluke.com/documents/F430-II_umeng0100.pdf (accessed on 25 May 2018).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NSI Switching States | |||||
|---|---|---|---|---|---|
| 1 | 1 | 1 | 0 | ||
| 2 | 0 | 1 | 1 | ||
| 3 | 1 | 0 | 1 |
| Parameter | Symbol | Value |
|---|---|---|
| Line-to-line grid voltage (rms) | 220 V | |
| Grid frequency | 60 Hz | |
| Switching frequency | 20 kHz | |
| Dc-link voltage | 260 V | |
| Dc-link capacitor | 4700 F | |
| Top filter capacitor (5th harmonic) | 46 F | |
| Top filter inductor (5th harmonic) | 6.12 mH | |
| Top filter Resistor (5th harmonic) | 620 m | |
| Bottom filter capacitor (11th harmonic) | 46 F | |
| Bottom filter inductor (11th harmonic) | 1.26 mH | |
| Bottom filter resistor (11th harmonic) | 300 m | |
| Nonlinear three-phase load input inductor | 5 mH | |
| Nonlinear three-phase load dc-link resistor | 31 | |
| Unbalance load input inductor | 7 mH | |
| Unbalance load inductor | 128 mH | |
| Unbalance load dc-link resistor | 60 | |
| Linear three-phase load inductor | 128 mH | |
| Linear three-phase load dc-link resistor | 24 |
| Parameter | Symbol | Value |
|---|---|---|
| Real pole position | a | 26.67 rad/s |
| Variable T | T | 1.64 s |
| Position of the imaginary part of the complex pole | 1820 rad/s | |
| Proportional gain of reactive power control | −0.075 | |
| Integral gain of reactive power control | −1475.2 s |
| Maximum Harmonic Current Distortion in Percent of | ||||||
|---|---|---|---|---|---|---|
| Individual Harmonic Order (Odd Harmonics) | ||||||
| <11 | TDD | |||||
| <20 * | 4.0 | 2.0 | 1.5 | 0.6 | 0.3 | 5.0 |
| ≥20 and <50 | 7.0 | 3.5 | 2.5 | 1.0 | 0.5 | 8.0 |
| ≥50 and <100 | 10.0 | 4.5 | 4.0 | 1.5 | 0.7 | 12.0 |
| ≥100 and <1000 | 12.0 | 5.5 | 5.0 | 2.0 | 1.0 | 15.0 |
| >1000 | 15.0 | 7.0 | 6.0 | 2.5 | 1.4 | 20.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodrigues Limongi, L.; Bradaschia, F.; Hermann de Oliveira Lima, C.; Cabral Cavalcanti, M. Reactive Power and Current Harmonic Control Using a Dual Hybrid Power Filter for Unbalanced Non-Linear Loads. Energies 2018, 11, 1392. https://doi.org/10.3390/en11061392
Rodrigues Limongi L, Bradaschia F, Hermann de Oliveira Lima C, Cabral Cavalcanti M. Reactive Power and Current Harmonic Control Using a Dual Hybrid Power Filter for Unbalanced Non-Linear Loads. Energies. 2018; 11(6):1392. https://doi.org/10.3390/en11061392
Chicago/Turabian StyleRodrigues Limongi, Leonardo, Fabricio Bradaschia, Calebe Hermann de Oliveira Lima, and Marcelo Cabral Cavalcanti. 2018. "Reactive Power and Current Harmonic Control Using a Dual Hybrid Power Filter for Unbalanced Non-Linear Loads" Energies 11, no. 6: 1392. https://doi.org/10.3390/en11061392