1. Introduction
During the last decades, the power flow pattern has changed with the increasing penetration of distributed energy from large wind farms, geothermal power plants, and solar photovoltaic power stations [
1]. Nowadays, the prodigious growth rate of plug-in hybrid vehicles (PHEVs) is accelerating this power system change, which means conventional generation is gradually being replaced and distributed generation (DG) is playing an important role in the future smart grids [
2,
3]. The concept of microgrids (MGs) emerged at the beginning of this century and is capable of operating in the grid-connected mode and islanded mode and handling the transitions between these two modes [
4,
5].
In AC microgrids (MGs), renewable energy generation is increasingly integrated into the grid through power electronic converters such as DC-AC inverters, which are always operated in parallel [
6]. When an MG is working in islanded mode, these inverters are always employed by droop control to realize satisfactory load-sharing performance and balance the demand of local loads to ensure system stability [
5,
7]. Meanwhile, the system regulation including frequency deviation and voltage droop, will be implemented in different time-scales [
8]. The control relationships of these MGs have three main categories, i.e., the master-slave control, peer-to-peer control, and hierarchical control. As for the master-slave control strategy, one inverter is treated as the master and the rest are slaves. The system safety and reliability are preponderantly dependent upon the master. The peer-to-peer control indicates the inverters have equal status, which avoids the communication links and is capable of plug-and-play operation when the micro-sources join or quit the MG whenever possible [
5]. However, these two strategies are individually used in islanded mode or grid-connected mode, and the hierarchical control strategy is proposed to combine both of these two modes and solve their switching problems.
Although the control strategies are different, they may use communication links among the inverter controllers more or less [
9,
10,
11,
12,
13,
14,
15], accordingly the network-based control was proposed. The introduction of network is mainly used to improve the performance and consolidate the system stability, as is the hierarchical structure. In addition, the power electronic converter in the MG has some features such as low inertia and fast response [
16]. The power system built by the MG is quite different from conventional power systems, showing a wide range of time-scale properties. The hierarchical design of the MG can distinguish these time-scales and fulfill their functions of electrical control, power quality regulation, and economic operation control independently in their exclusive time-scale, which is helpful to realize function standardization and improve the intelligence and flexibility of the MG [
5,
17]. The primary layer in the hierarchical structure containing most power electronic converters seldom uses network or only uses low-bandwidth network, then the droop control is used to solve the load-sharing issues among the paralleled micro-sources [
18]. The secondary control layer is employed to eliminate the deviation of output voltage and frequency existing in the primary layer, the structure is possibly centralized or decentralized and implemented partly by network configuration. However, the droop control employed in primary control has several disadvantages that limit its application, such as relatively inaccurate load-sharing, slow instantaneous response, frequency and amplitude deviation, and strong susceptibility to converter output impedance, etc. Especially when lots of different types of loads such as PHEVs plunge into the MG, it is hard to hand these disturbances from the sources to the loads safely and keep system permanent stable.
Many advanced methods based on droop control had been reported for inverter parallel operation [
19,
20,
21,
22]. For example, some strategies were presented such as Complex Line Impedance-Based Droop Method [
23], Angle Droop Control [
24], Voltage-Based Droop Control [
25], and Adaptive Virtual Impedance Control [
26]. These methods can partially solve the problems of link impedance unbalance, non-linear load-sharing, voltage distortion, and so on. However, they were trying to avoid the communication usage, at the expense of adding high computational complexity and extra analytical prerequisites. More importantly, they always achieved slightly inferior performance than the methods with interconnections. Under this circumstance, network-based control strategies were proven to be effective for the performance optimization of MGs [
18]. The interconnections can be designed from the physical line to network with a wide range of bandwidth. In this way, long-term stability, higher reliability, and superior load-sharing performances in different time-scales can be obtained via network. Moreover, the network in the primary layer could be integrated with the secondary layer if their communication time-scales are matched. However, some uncertain factors related to communication conditions such as time-delays or data dropouts would influence the system in the different ways [
27]. How to evaluate the impact of these factors and define the stability region of the system having these delays and data dropouts is very important.
In this paper, a comprehensive analysis of network-based control strategy used in the islanded mode of an AC microgrid is investigated, the model is simplified as a paralleled three-phase inverters system and it is a continuation of [
28]. In general, the merits network-based control can bring (1) simple and convenient implementation, (2) only one communication line needed to fulfill the bi-directional data flow, (3) better power-sharing performance than the traditional droop method, (4) anti-interference ability to restrain disturbances such as network-induced negative factors, (5) no extra control loop with a complicated algorithm, such as a virtual impedance loop, to supplement. Moreover, more advantages of the method including strong robustness and good time-scale compatibility can be achieved through analysis. Theoretical and experimental methods were utilized to verify these characteristics. The proposed analysis method and the obtained advantages of the network-based control strategy are worthy of studying because (1) the transmission speed and allowable capacity of the network to keep the system stable are in a wide range, and the network-based control can be compatible with both fast and slow loops. Moreover, the communication design is flexible and can be integrated with a power electronic converter and it is beneficial to build a new MG structure. (2) In a wide time-scale range, the system stability and performance may be immune to the time-delays and data dropouts. The high reliability it creates is helpful to maximize network utilization in power electronics. It is necessary to mention that many different communication infrastructures, such as Ethernet, worldwide interoperability for microwave access (WiMAX), and wireless fidelity (Wi-Fi), can be the good alternatives in network-based control in MGs [
5]. With the development of highly reliable and ultrafast networks, the impact of time-delays and data-dropouts on MG network-based control would possibly decrease.
This paper is organized as follows.
Section 2 provides the envisaged architecture of the network-based control system with paralleled three-phase inverters and addresses its potential role.
Section 3 presents the network-based control methods.
Section 4 builds the mathematical model featuring system sensitivity towards time-delay and data dropout, provides the analysis methods to specify their system stability. Experimental results of the proposed analysis are given in
Section 5. The supplementations of some issues including different rated power, time-delay level, and abnormal communication conditions are described in
Section 6.
Section 7 concludes the main contribution of this paper.
2. Architecture of Network-Based Control in MGs
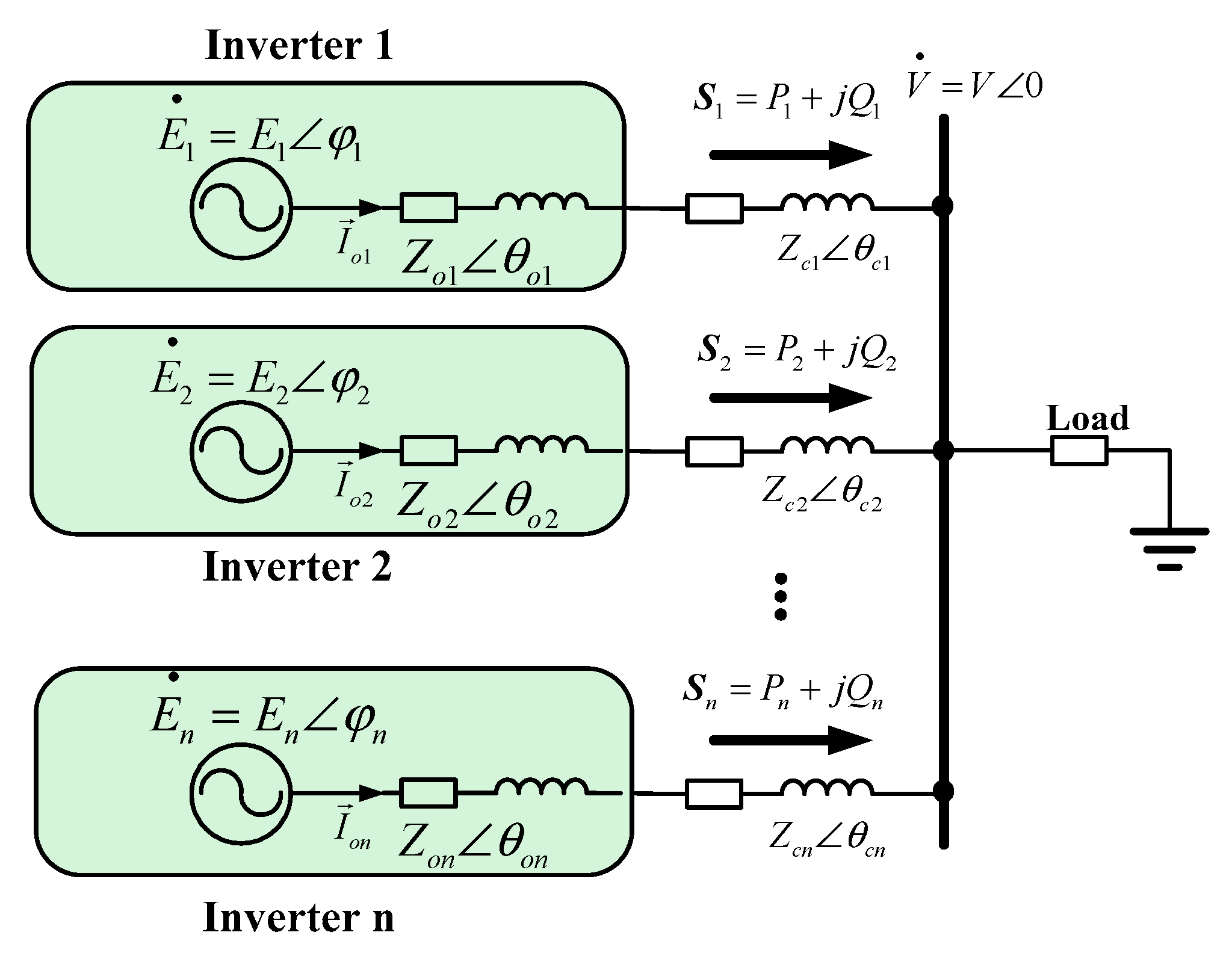
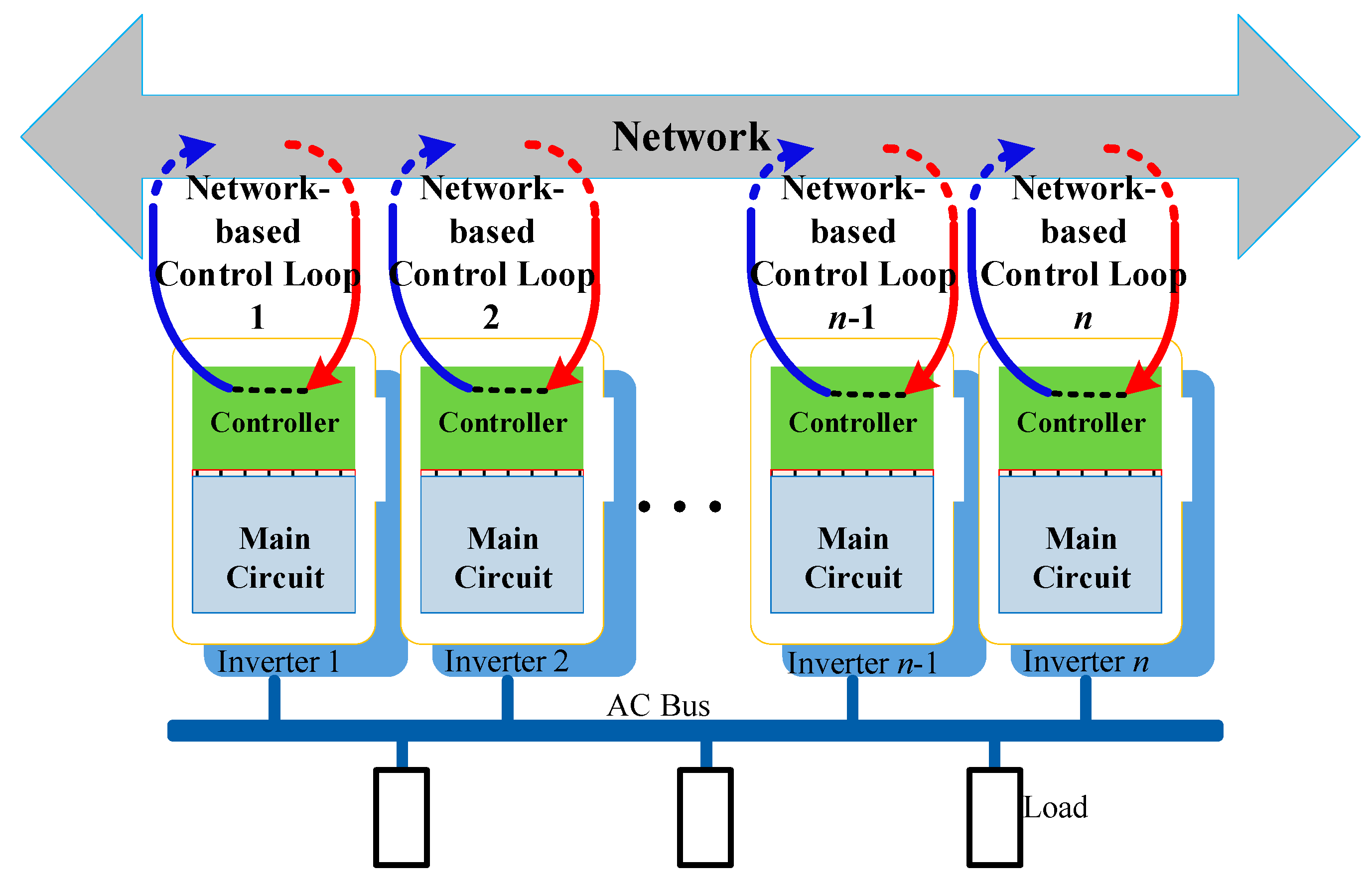
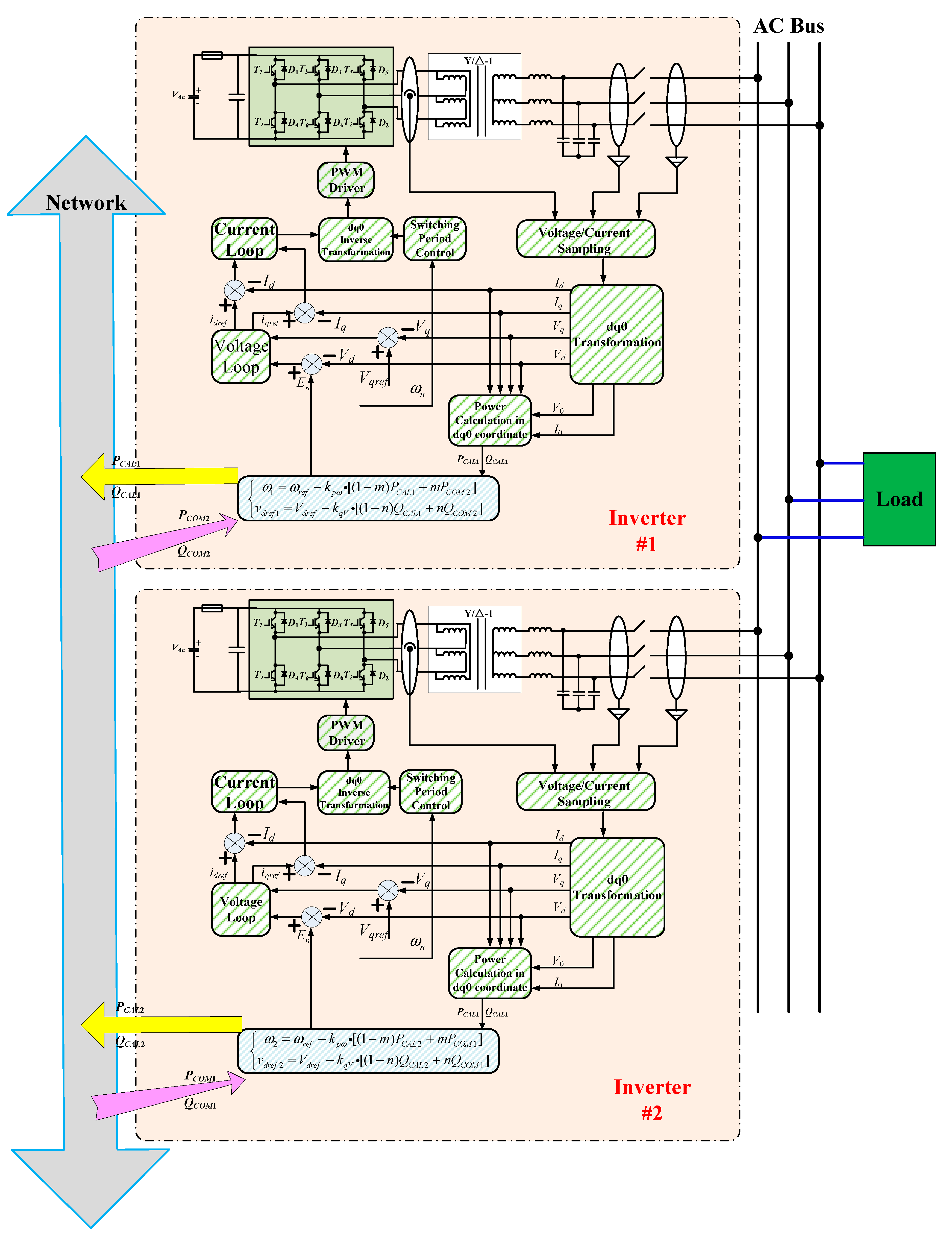
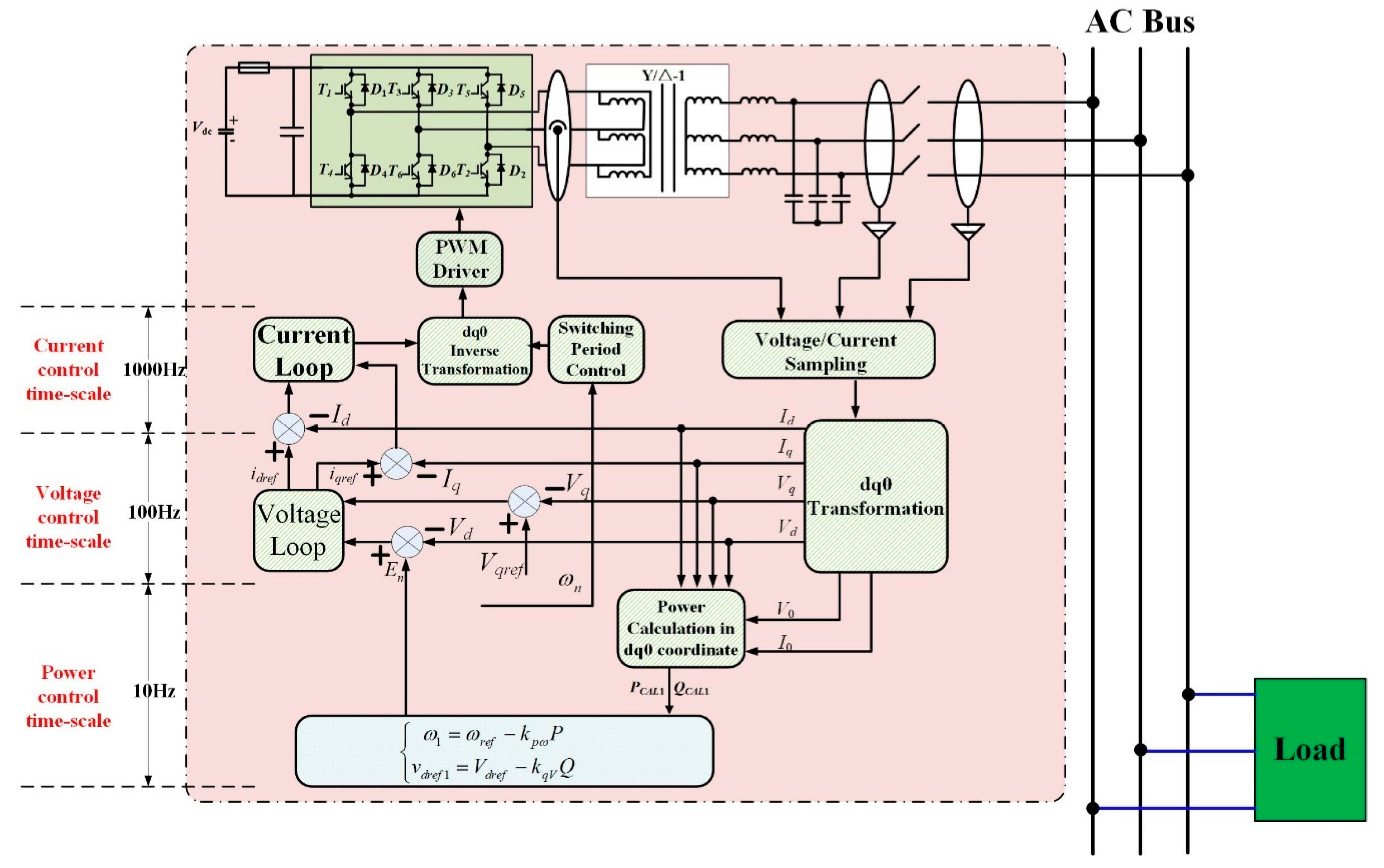
The operation time of the primary layer, the secondary, and tertiary level can be microseconds, seconds, and minutes. Hierarchical design is aiming for independent task-finishing for these different time-scale layers. We suppose the primary layer control is working without communication links, then droop control and its modified methods are available. As discussed above, these kinds of methods have their inherent disadvantages. For long-term stability and reliability, a network-based method could be possibly required to support the primary layer. If the network has powerful data-scheduling capability and the same time-scale level, the communication could be integrated together between the primary and secondary layer, which is cost-saving and increases utilization. That is the envisaged idea proposed in this paper, architecture of which is shown in
Figure 1 (the tertiary layer is not considered here). There are
N inverters in parallel micro-sources of MGs to support electricity of the load, where power droop control is employed to guarantee the basic load-sharing performance and system stability. The network-based control plays a helpful role in enhancing high-level reliability and stability.
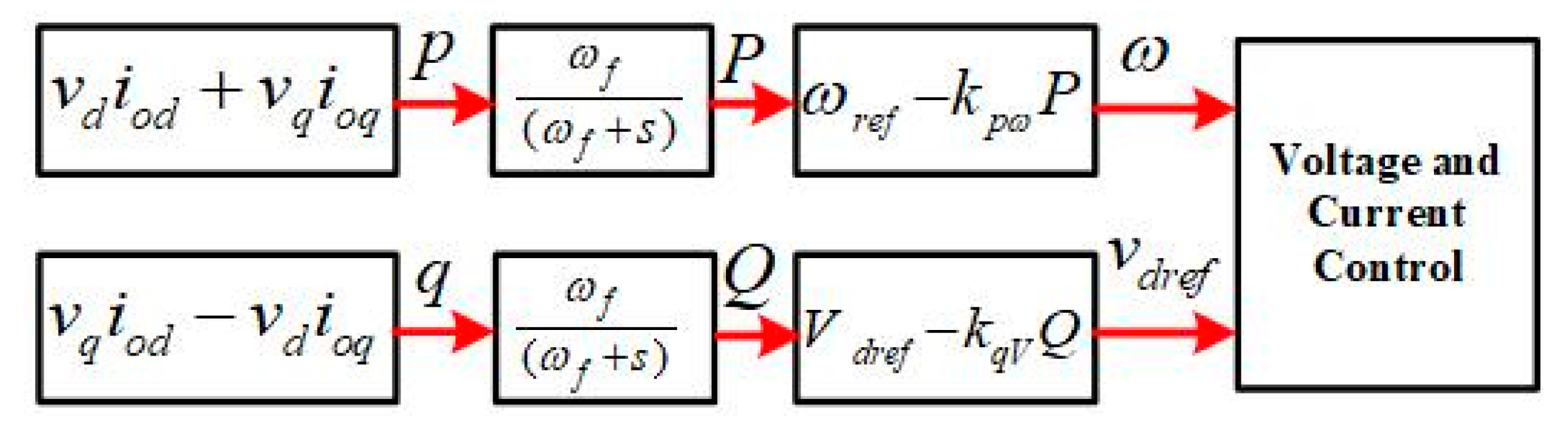
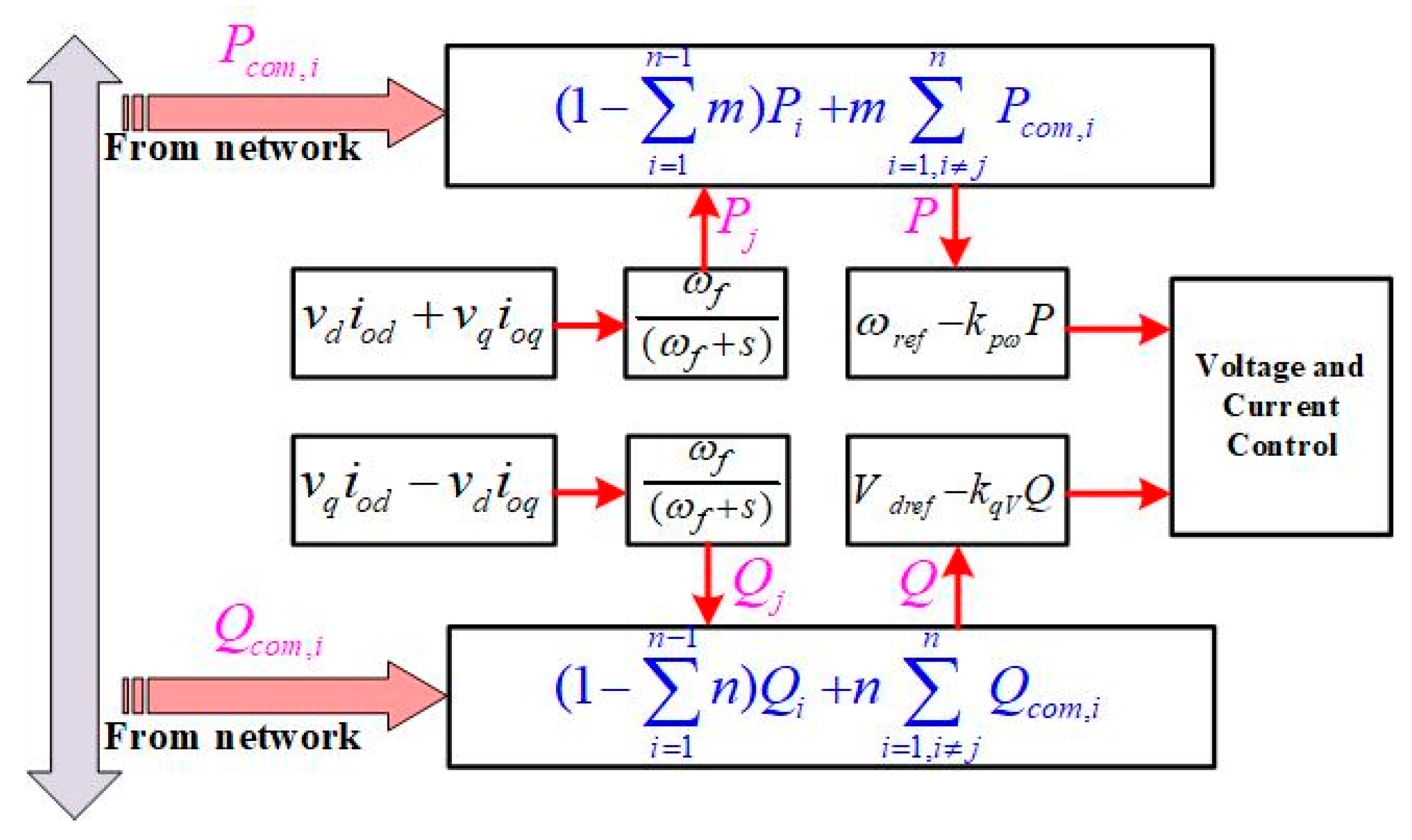
In primary control, there are at least two kinds of loops, the inner fast current/voltage loop and the outer slow power-droop loop. Sometimes, the power loop features an open loop unless virtual impedance or other strategy is added. In this paper, a novel idea related to the control loop is proposed, where the third control loop is designed to help the system in data-interaction via a network, in which the loop data flow is marked as a red arrow line and shown in
Figure 1. As is well-known, the network transmission speed is adjustable and thereby the time-scale of the extra loop could be flexibly designed. That means it could be slower than or even comparative to the inner loop and power loop. Thereby, how to design the third loop and how to evaluate the impact of network-induced time-delays or data dropouts during transmission are very important.
5. Experimental Results
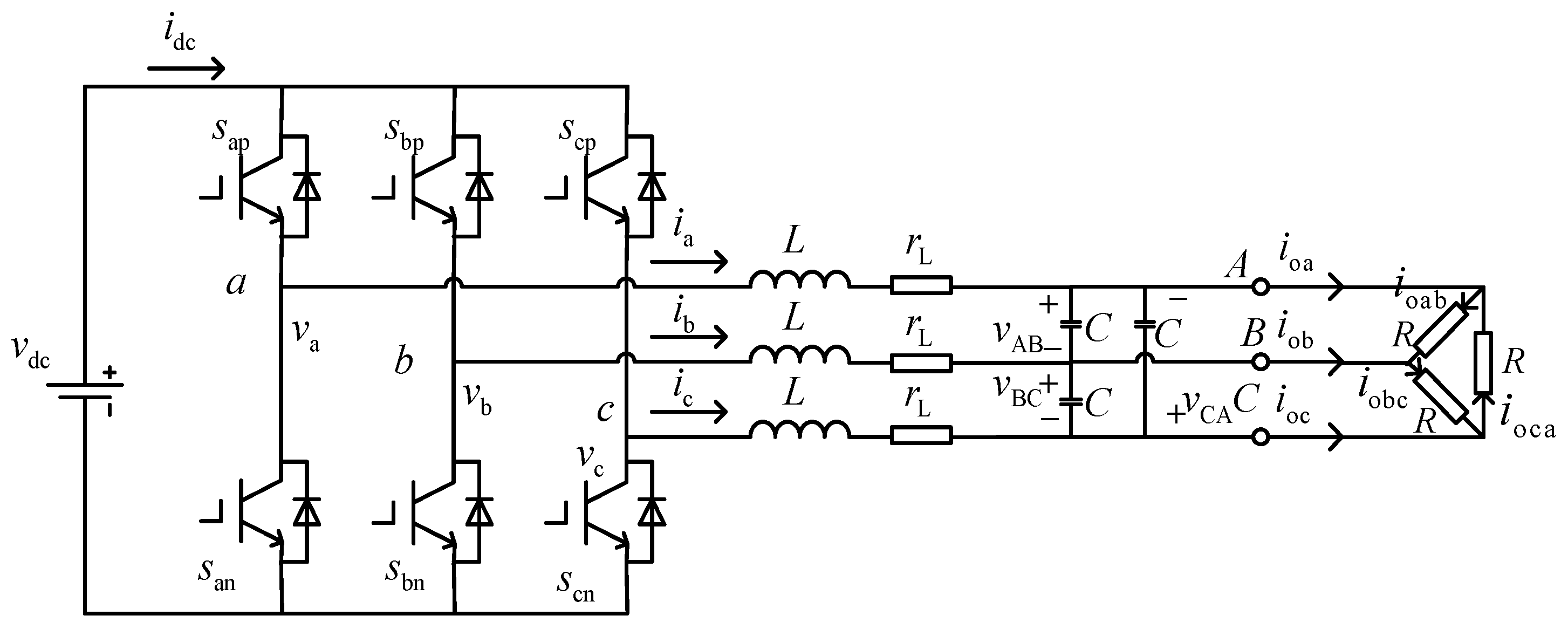
In order to verify the accuracy of mathematical analysis and the effectiveness of power allocation strategy, an experimental platform consisting of two 3 kW inverters using three-phase three-wire half-bridge topology was built, the architecture diagram is shown in
Figure 13. Each inverter was connected via CAN bus, which has perfect priority arbitration and enough transmission speed to form an information-shared network with other inverters. DSP (Digital Signal Processor) TMS320F28335 was applied to realize full digital control. The inductive current and capacitor voltage were converted into digital values after processing by the ADC (Analog-to-Digital) module embedded in the DSP, and abc-dq0 transformation was carried out. Through the instantaneous power calculation and low-pass filtering, the active power and reactive power
PCALn and
QCALn (
n = 1,2 in this experimental platform) were obtained, then they were put into the weighting algorithm with the network power information
PCOMn and
QCOMn to realize the P/Q droop control strategy. The transmission was set as bi-directional mode, the synchronous ID was equipped for each transmitted data to ensure all the communication action and control process have the same timestamp. The sampling period of this network-based control strategy was originally set as 20 ms. The specification parameters of this platform are shown in
Table 2.
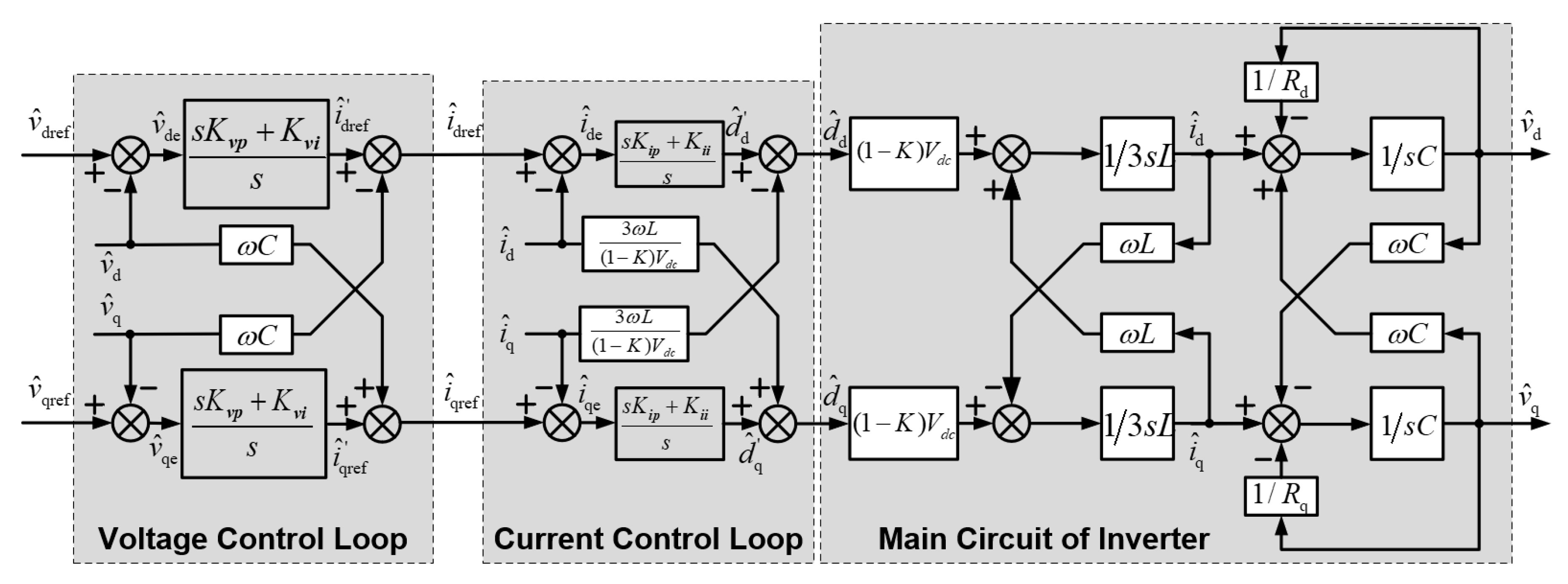
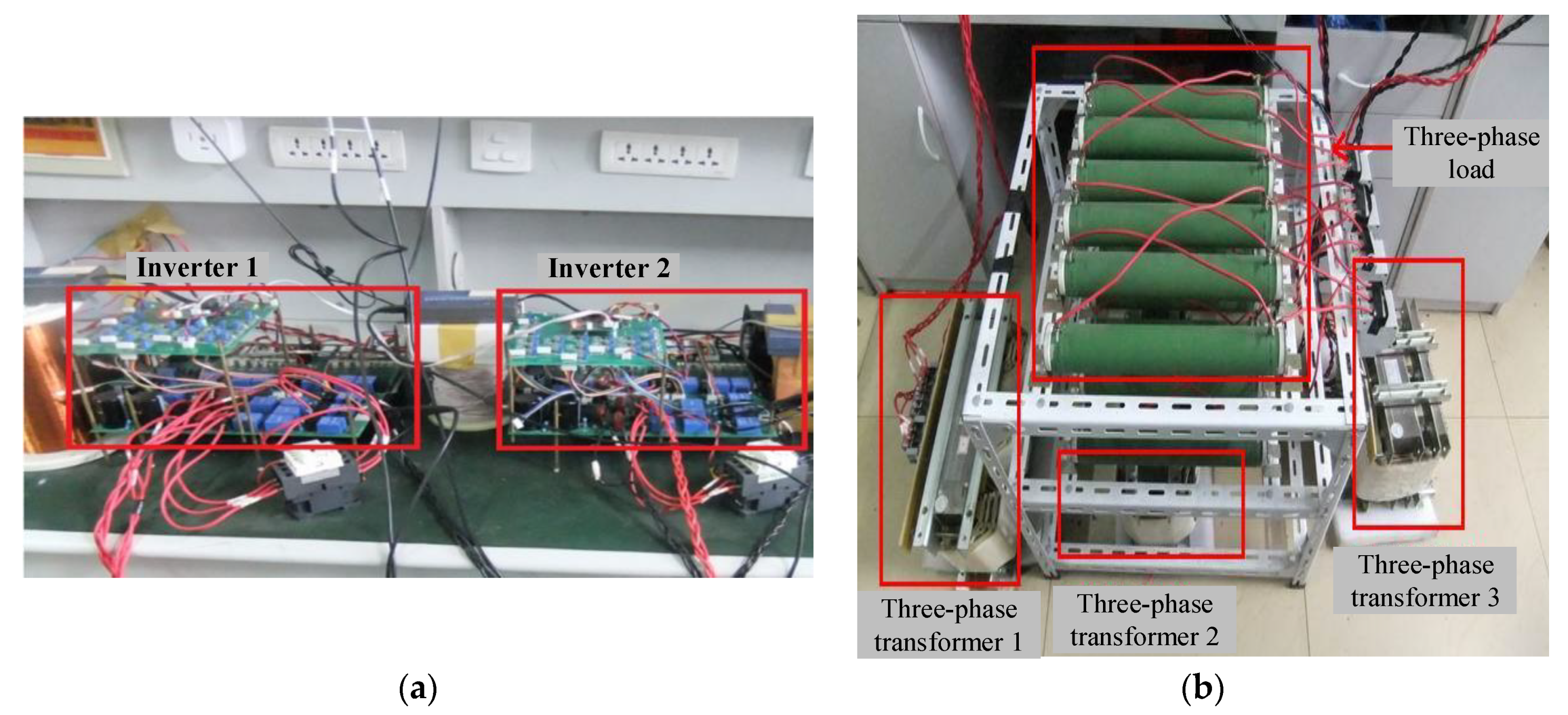
The control of this network-based system can be analyzed through three loops. First of all, after the instantaneous active and reactive power calculation based on dq0 coordinate transformation theory being done, P/Q droop control is designed to produce the voltage reference and provide the regulation of the output frequency. The main function of P/Q droop control is to shape a desired steady-state and dynamic performance, guarantee the system in an ideal power-sharing feature. Secondly, the output voltage is closely tracked through the voltage loop to ensure the stability of the inverter. Finally, the current loop is used to reflect the state change of the system and improve the dynamic response speed. A physical picture of the experimental platform is captured in
Figure 14, where two three-phase inverters are operated in parallel, the network interconnection, the white line in
Figure 14a, is used to realize the network-based control. IPM (Intelligent Power Module) PM75RLA060 is employed as a main-circuit module of inverters. The output of each inverter is connected to three-phase transformers as shown in
Figure 14b, which is designed as Y/△-1 connection for primary and secondary winding. Inductance L/capacitor C filter is employed, and the filter inductance L is obtained by leakage inductance of the three-phase transformer. The outputs of the three-phase transformer are linked with the common three-phase load via contactors as shown in
Figure 14b.
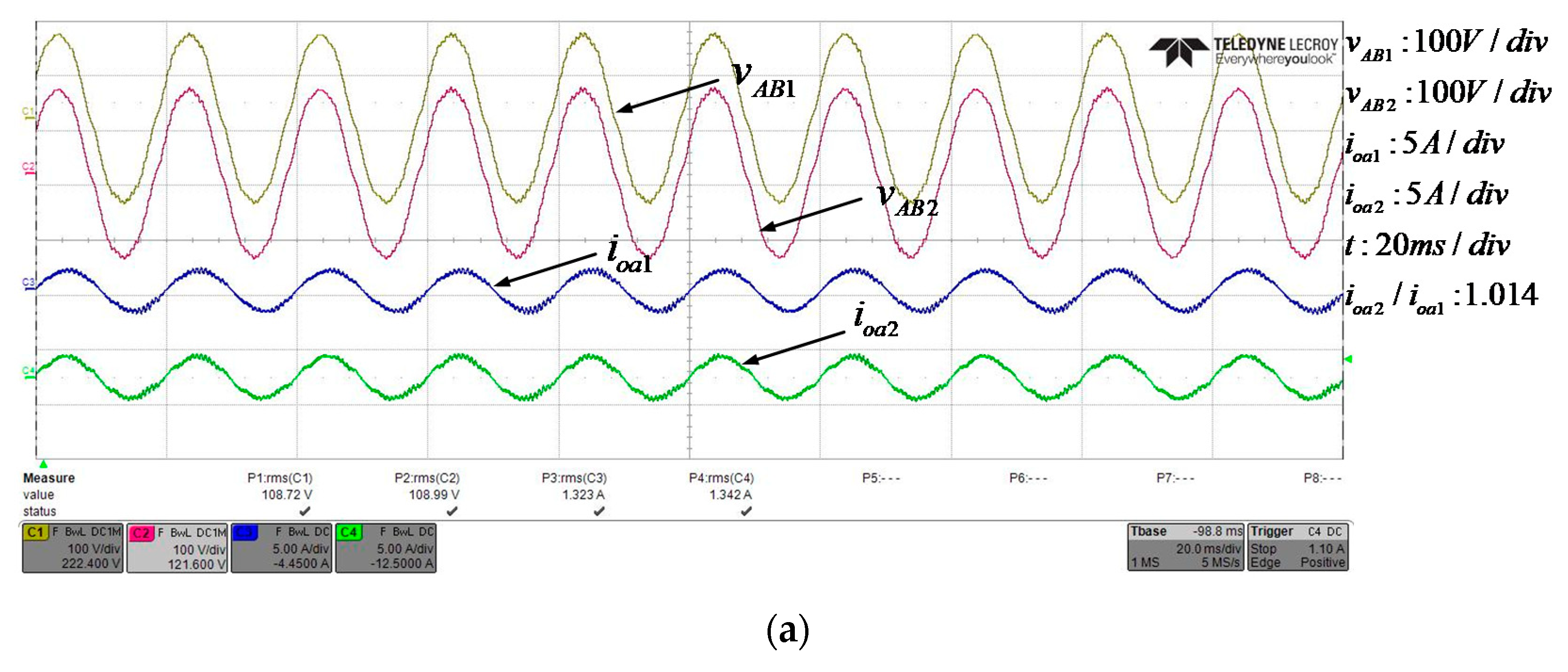
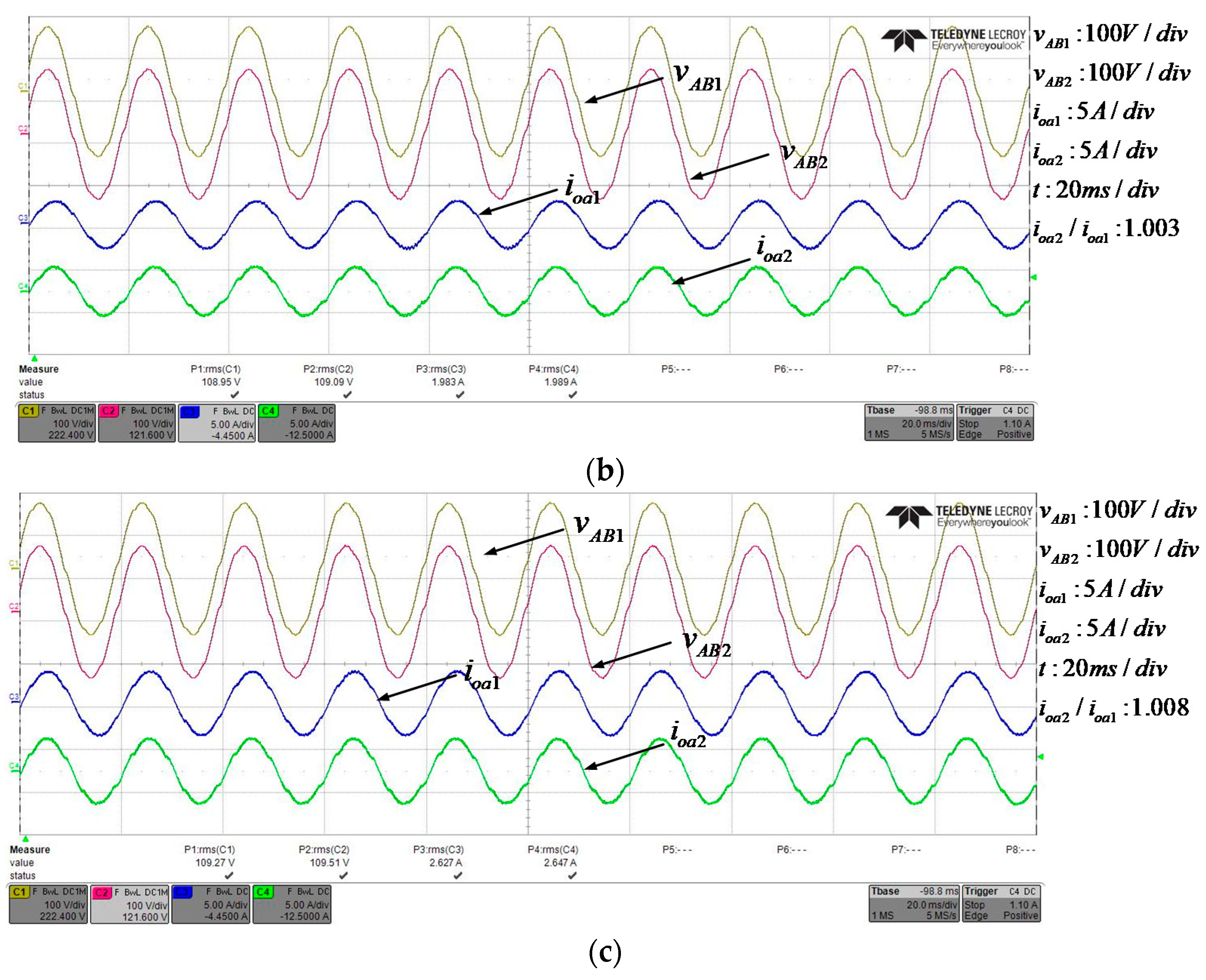
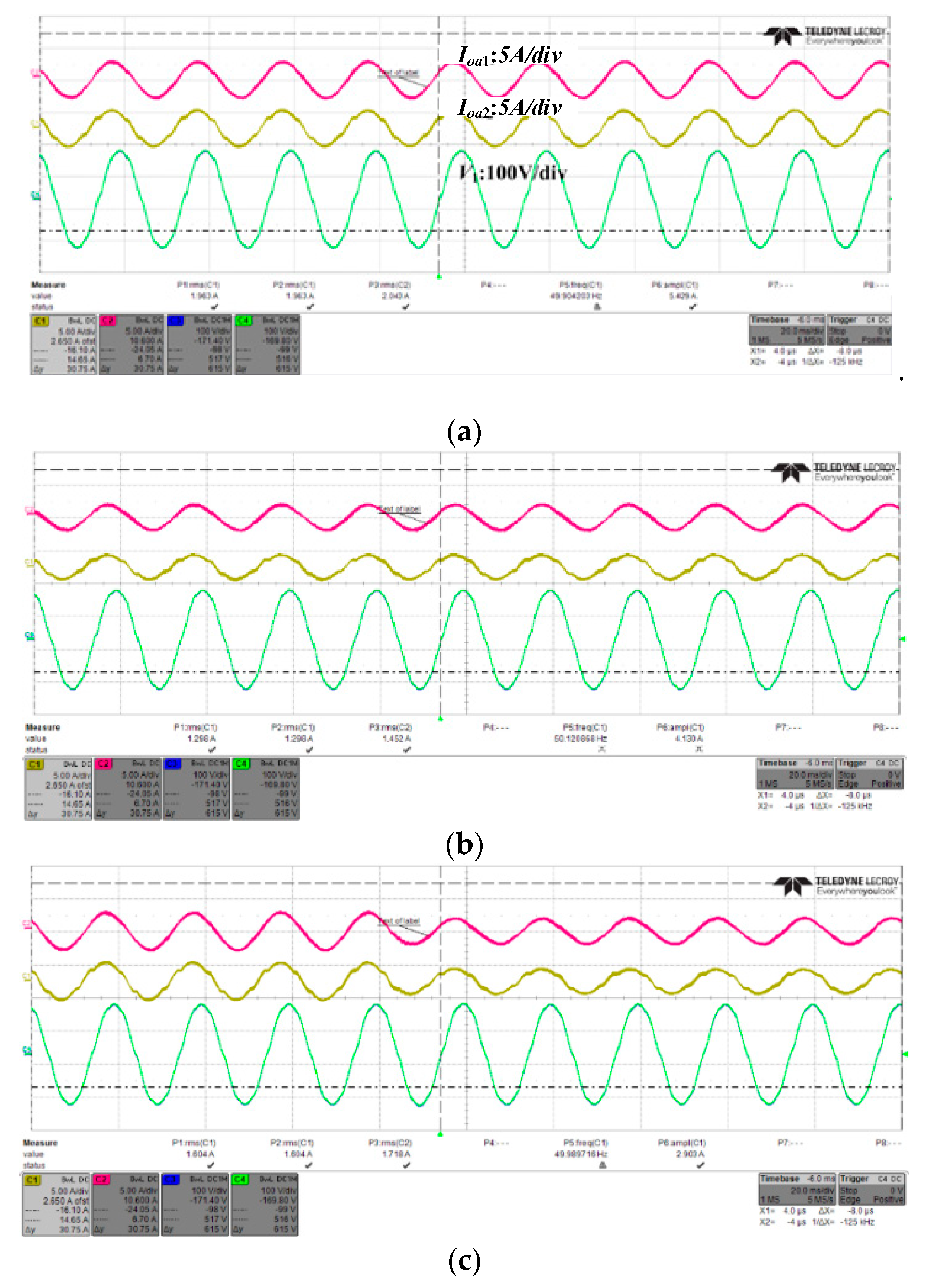
The steady-state output voltage and current in three different resistance loads when two inverters being paralleled are shown in
Figure 15a–c. It is clearly shown that when the load changes, the A-B-phase output line voltage of the two inverters (
vAB1,
vAB2) basically remains unchanged, while the inductive currents (i.e., A-phase output current
ioa1,
ioa2) have the constant proportional variation. In addition, the difference value of these two output currents, i.e., circulating current is nearly zero, which means the load-sharing is quite satisfactory as expected.
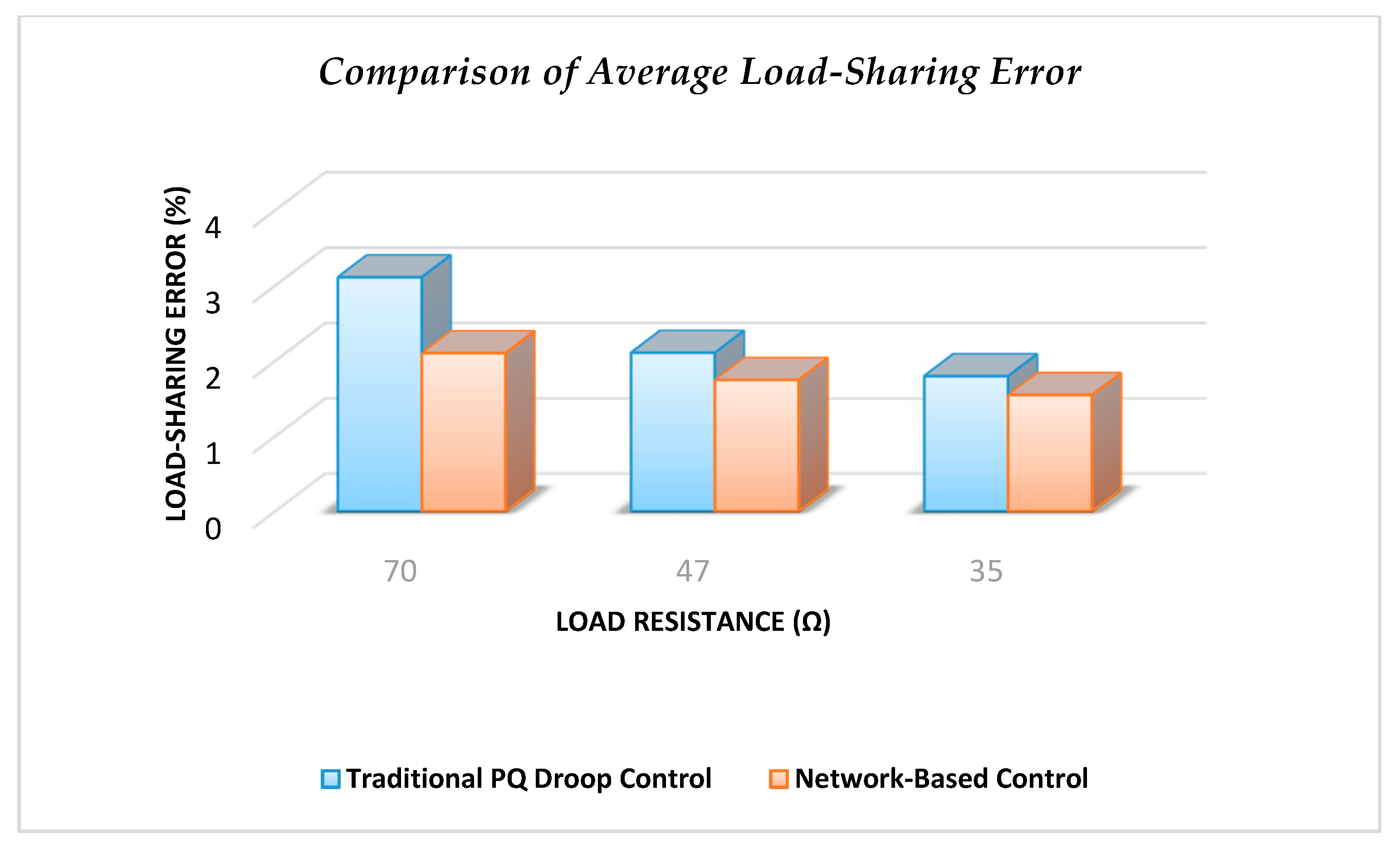
To better describe the superiority of the network-based strategy of inverter parallel operation in steady-state accuracy. The load-sharing error is defined and introduced by
Output current RMS (Root Mean Square) of each inverter was measured and recorded simultaneously. To make the results more reliable and precise, a number of groups of data were collected and put into the load-sharing error equation (Equation (24)). Then these errors are compiled as statistical data, such as average error or maximum/minimum error, etc. The inverter-parallel experiments were carried out by using network-based control and traditional power droop control (Equation (6)). The load-sharing errors can also be statistically processed and compared to quantify the performance. The average load-sharing errors by using the network-based control and traditional power droop control are addressed in
Figure 16. It is clearly indicated that on most occasions, the average load-sharing errors achieved by using network-based control are less than those with the conventional droop control method. More importantly, these errors can be restricted within 5% even though the network-based method must tolerate inherent network-induced time-delay (the delay is much less than one sampling period 20 ms without considering an unexpected and abnormal communication situation).
5.1. Impact of Time-Delay
To investigate the time-delay impact, we artificially produced different transmission times and observed how much time-delay would influence the system performance. As mentioned before, the timestamp will be labeled by ID for each transmitted power data for each inverter, which means synchronous function for the digital control is required. When the start-time begins with the power data of the other inverter arriving at the CAN bus toolbox, the timing of control time-delay can be calculated. In general, if the sampling period is long enough so that the controller can await the transmitted data with the same ID, the network-induced time-delay has little effect on the system stability.
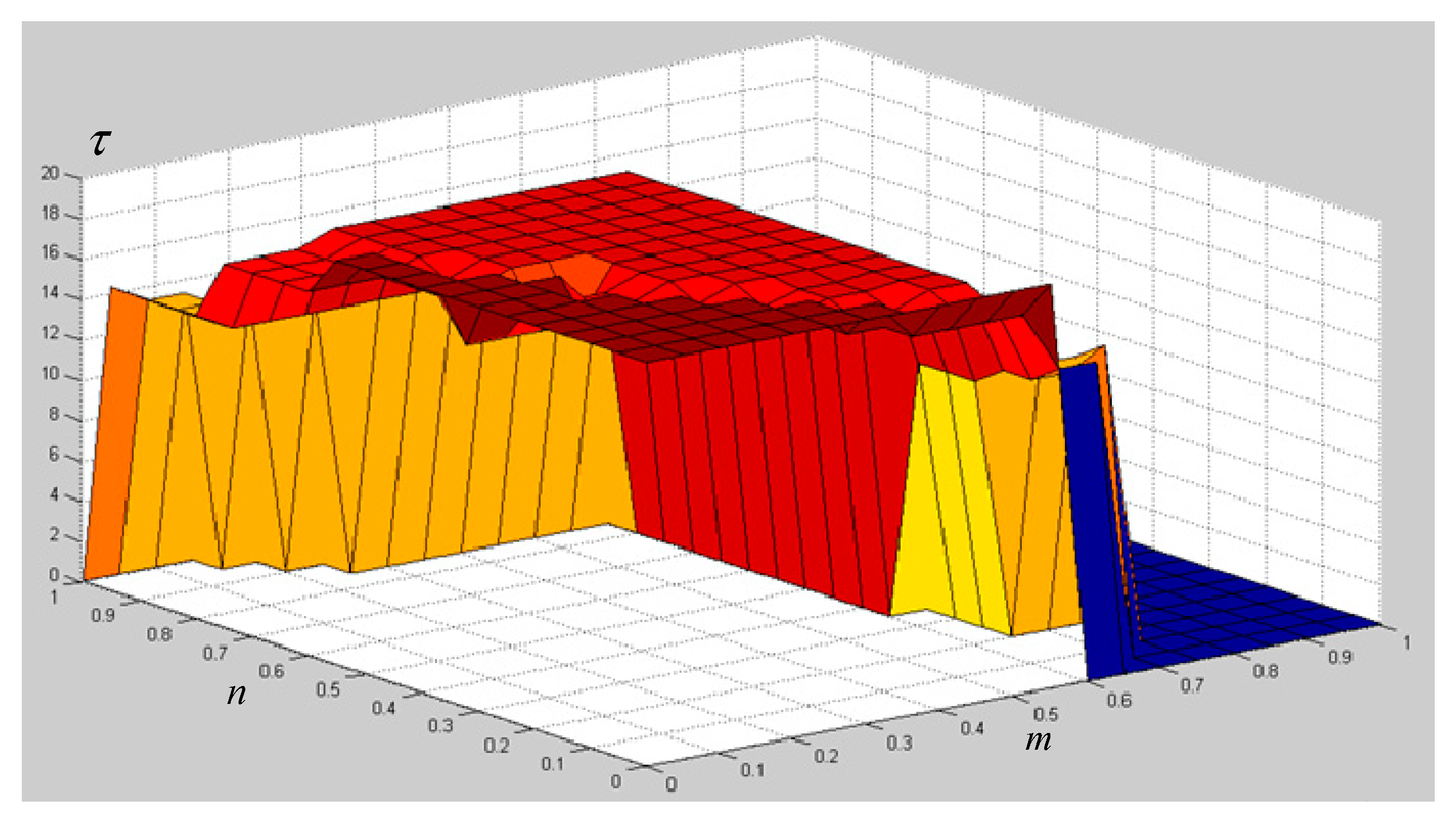
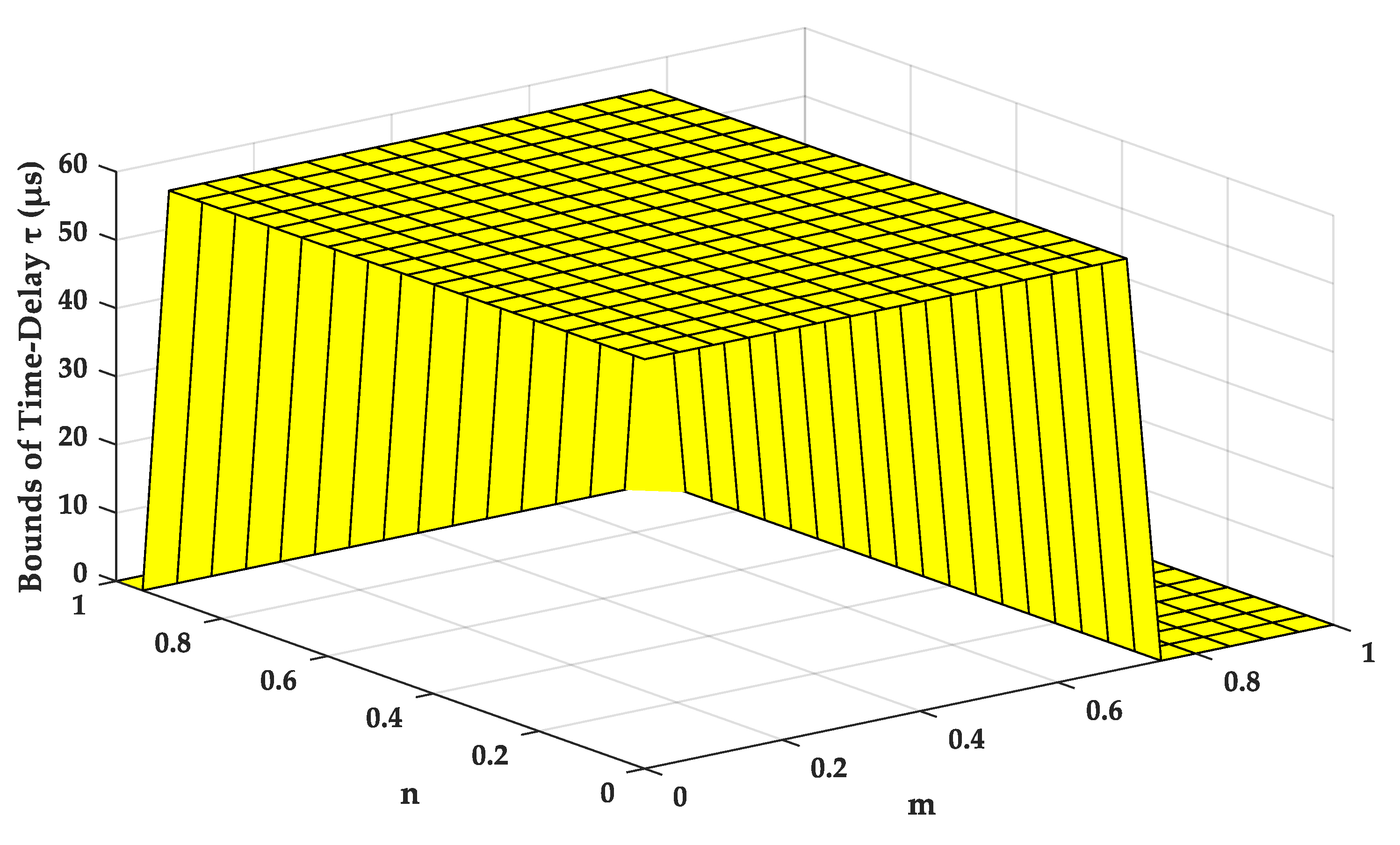
One group control coefficients
m =
n = 0.6 was used to test the time-delay impact. In the theoretical analysis in
Section 4.1, the allowable time-delay bound can be reached at one sampling period
h = 20 ms in a wide
m/
n range including
m =
n = 0.6. The time-delay artificially made by the time buffer was created at
. The experimental results are shown in
Figure 17, where output current
ioa1,
ioa2 (the upper two) and voltage waveforms
v1 (the lower green one) in load resistance 35 Ω, 47 Ω, and their mutual dynamic transit are displayed. These results show a desired steady-state output and very small circulating current between these inverters, an excellent dynamic response for load step changes in a network-based control strategy. To further describe its delay-insensitive feature, 30 load-sharing errors calculated by 30 groups of output current RMS measured at 5 min intervals during steady-state operation were recorded and numerically processed by average value. In this case, the average load-sharing error is within 2.8% when the load resistance is 35 Ω, which indicates that the excellent system performance is still maintained even when the time-delay is artificially increased to 20 ms. It is an inspiring outcome because the network-based control demonstrates a good robustness towards network-induced time-delay.
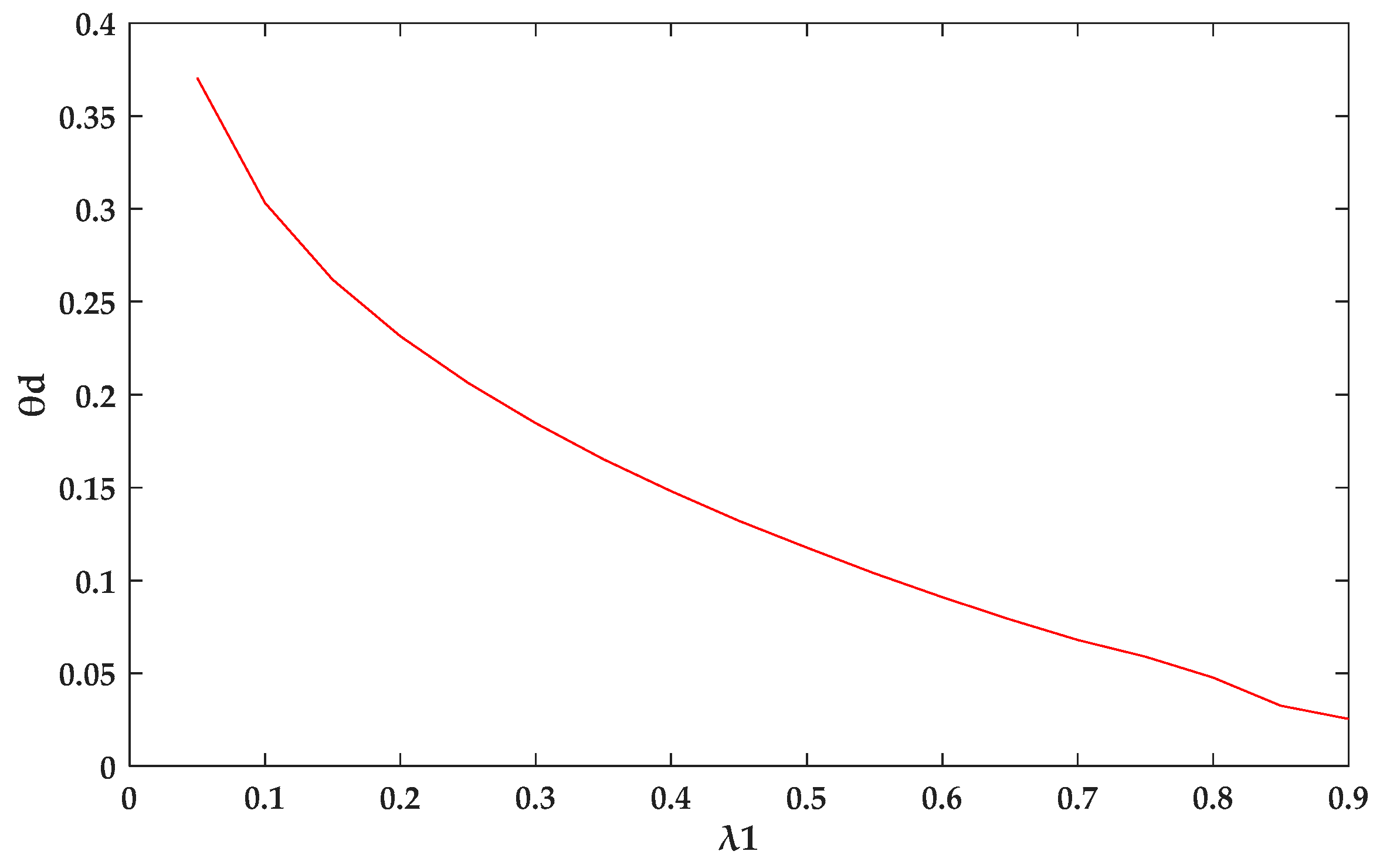
5.2. Impact of Data Dropout
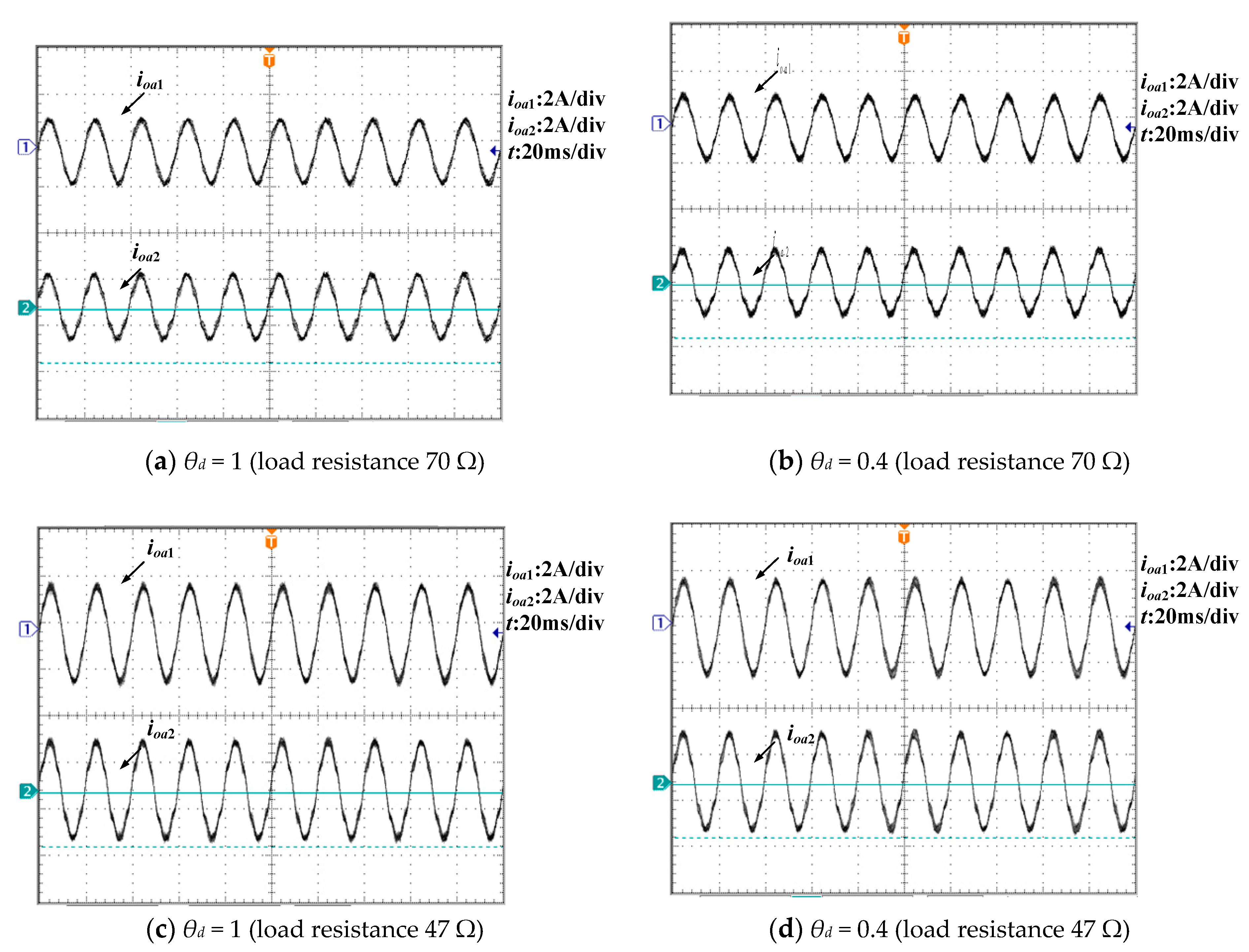
In this experimental test,
θd is defined to quantify the data dropout. For convenience, it can be designed as constant packet loss ratio. For example,
θd = 0.4 represents that 6 out of 10 data have been discarded or unsuccessfully transmitted. In actual operation, the deliberate design of
θd is based on the transmitted ID of power data. For each 10 continuous data transmissions with contiguous IDs, we can artificially choose some of them out of the network-based control to fit the
θd value. The comparisons of output current with inverter parallel operation between
θd = 1 and
θd = 0.4 in two load conditions can be observed in
Figure 18. As described above,
θd = 1 means there is no data dropout during the data transmission. From the results we can see power-sharing performance is barely affected by data dropout even if almost half of the transmission data is missing or blocked from being received. In addition, we tested worse network conditions such as
θd = 0.3 and
θd = 0.25, and the system kept stable and had satisfactory load-sharing performances as well. However, there will be a significant increase of load-sharing error when more data dropouts occur, especially when
θd < 0.2, which is largely consistent with the theoretical analysis in
Section 4.2. Overall, the network-based control shows a strong robustness towards data dropout.
5.3. Performance Tests of Small Time-Scale
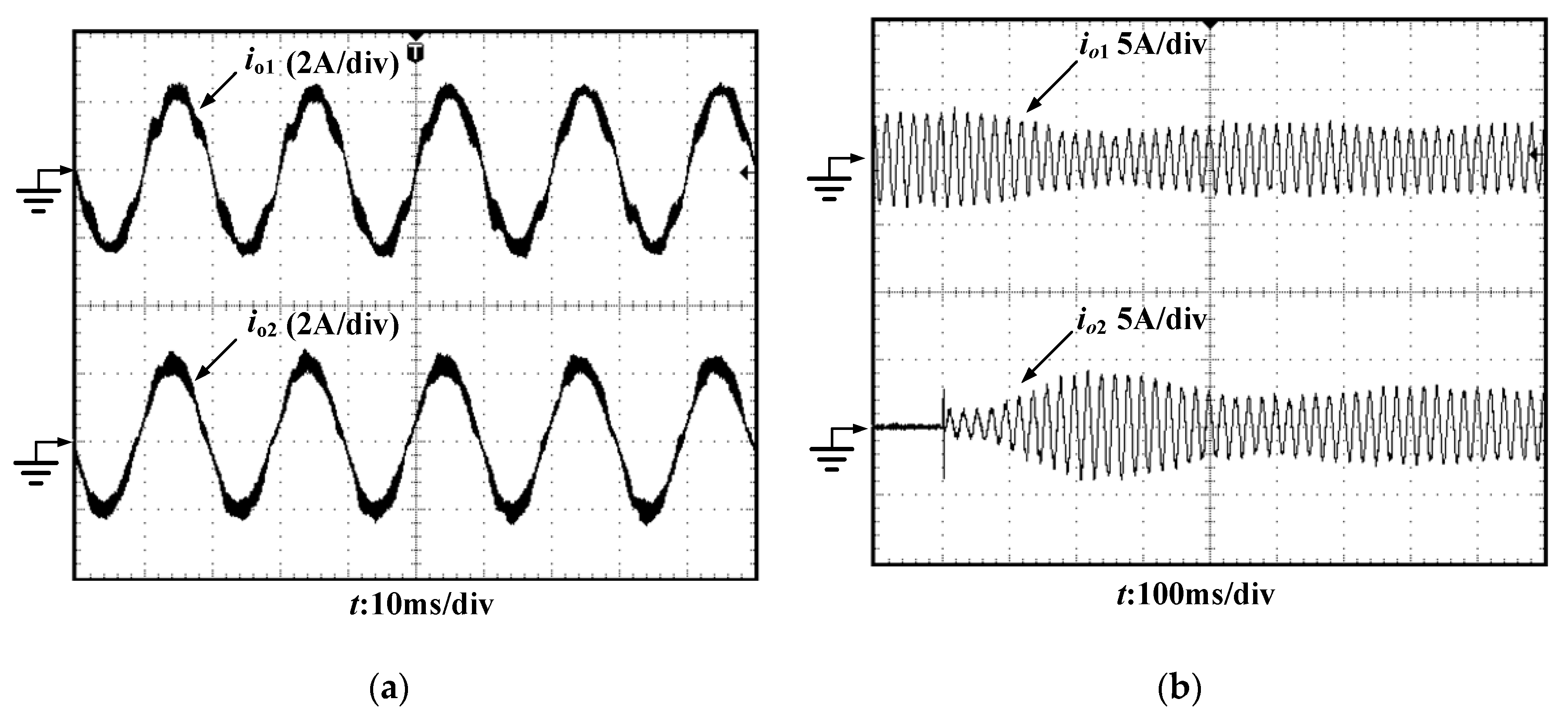
The adaptation of network-based control with a small time-scale is investigated in this section. We designed the sampling time
h approaching to microsecond level, 60 μs and the time-delay of transmission was set as
h. The steady-state and dynamic performance with load resistance 70 Ω are shown in
Figure 19. From the output current of inverter #1 and #2,
io1 and
io2, it demonstrates that although there exists some distortion and oscillation in the steady-state and dynamic state operation, the overall results are satisfactory. The existing output-current distortion is potentially due to the fact that the voltage reference is frequently updated upon the arrival of fast-speed transmission data, and the error of sampling or calculation would increase the possibility of impacting the voltage, current control loop, and power quality. To give a further evaluation, the average load-sharing errors are collected and calculated. Even when the time-delay is up to 100 μs, the load-sharing is still kept within 5%. In brief, the long-term good reliability, excellent control accuracy, strong robustness and wide time-scale compatibility can be guaranteed by means of a network-based control strategy.
7. Conclusions
The AC microgrids (MGs) are capable of operating in grid-connected and islanded mode, handling their transitions. For islanded mode, droop-controlled inverters and their parallel operation are employed to balance the generated active and reactive power in the microgrid with the demand of local loads to ensure system stability. Different from traditional power droop control, network-based control was presented in this paper to obtain the potential performance of paralleled inverters. However, the negative factors derived from network such as time-delay and data dropout would have unexpected impacts on system, may degrade or influence the system stability and performance. From this perspective, the superiority of network-based control was analyzed. System models with time-delay and data dropout were built to evaluate their impacts. In addition, the same procedure was carried out to test the outcomes when different time-delay and data dropout are introduced. It was observed from the results that the network-based control has satisfactory performance under these unusual scenarios and strong robustness to these negative network-induced factors. On the other hand, if we change the control period and time-scale by increasing the sampling period from hundreds of microseconds to milliseconds level, system stability is still maintained in a very wide range with varied control coefficients, which means the system has a wide time-scale compatibility. In this sense, it provides the possibility of communication integration for different control layers in AC microgrid design with hierarchical structure. Experimental results verified the effectiveness of the analytical method, and the strong robustness and good time-scale compatibility of the network-based control strategy in a droop-controlled AC microgrid system. Finally, some important issues such as variant rated power and time-delay level existing in the paralleled inverters and communication failure were addressed, the description of problem-solving and explanation were also provided.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}