
The Performance of Electronic Current Transformer Fault Diagnosis Model: Using an Improved Whale Optimization Algorithm and RBF Neural Network
Abstract
:1. Introduction
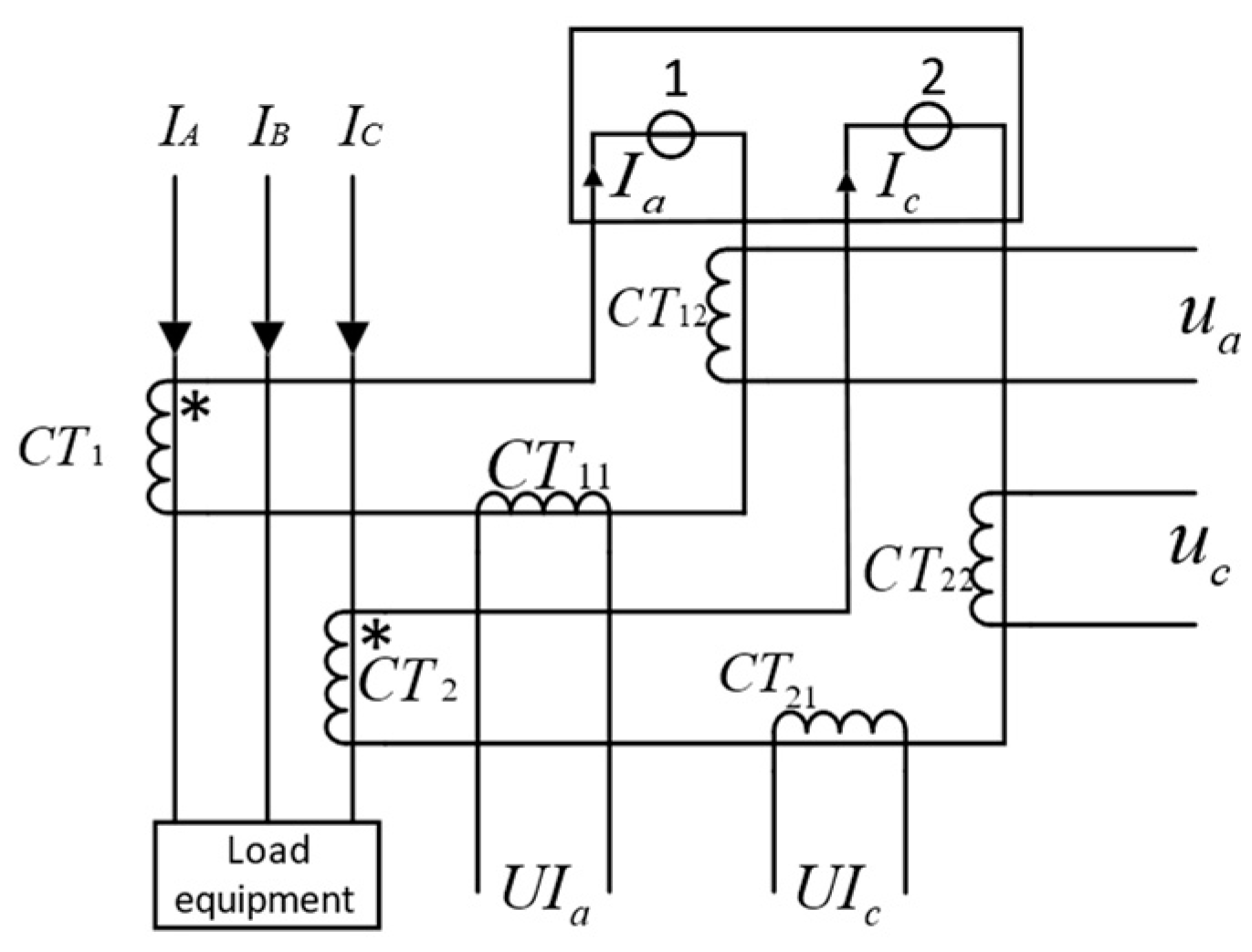
- We designed a detection circuit for electronic current transformers. Based on this design, we collected data through the detection points in the circuit, which can provide samples for training the RBFNN;
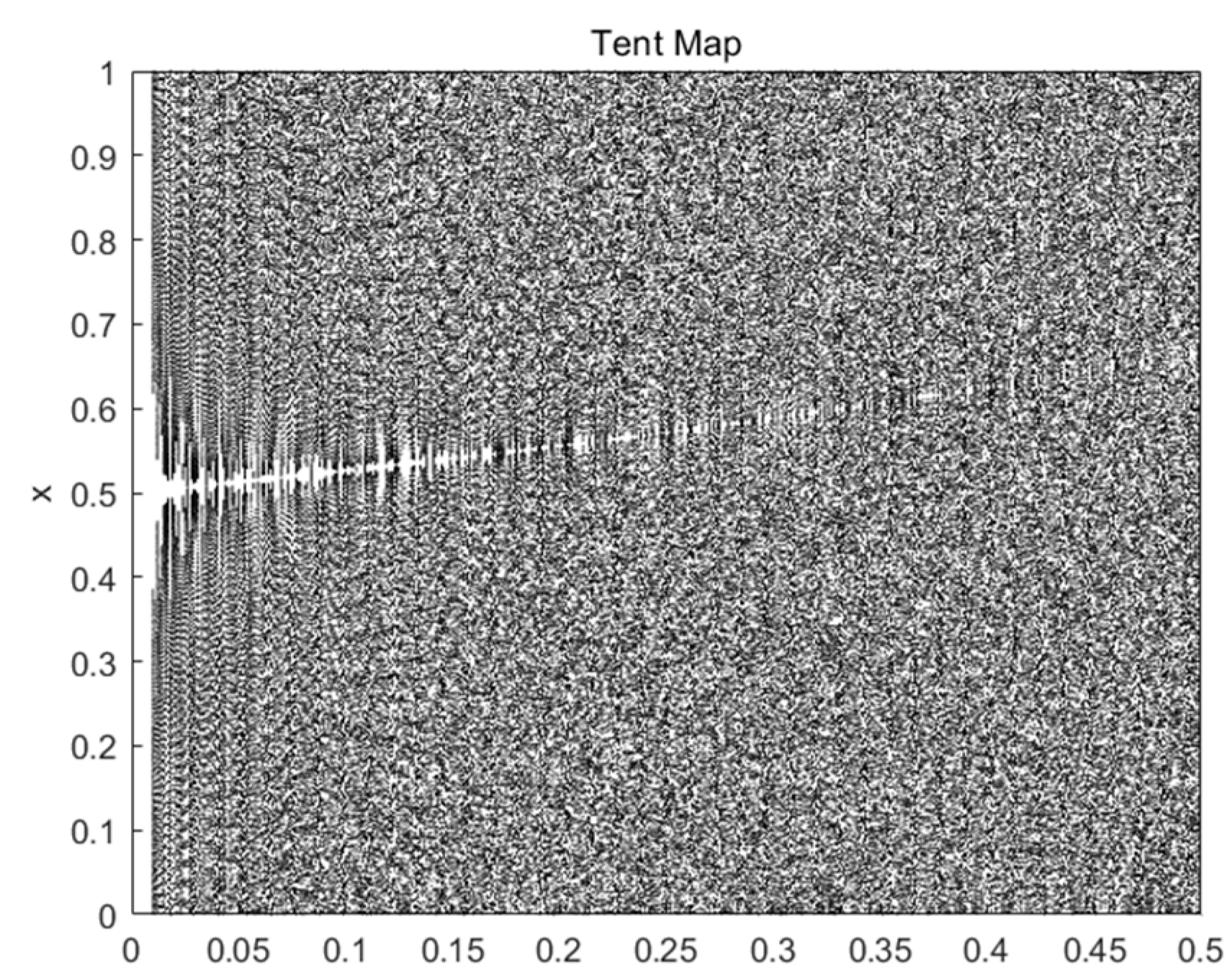
- We introduced the tent chaotic map strategy to enhance the population diversity of WOA, which helps accelerate the convergence speed of the algorithm;
- We introduced nonlinear convergence factor and adaptive inertia weight to enhance the local exploitation ability and global searching abilities of the WOA;
- We adjusted the annealing function of the SA algorithm, which makes the annealing speed vary according to the fitness value of the accepted worse solution. This will not only help the algorithm to avoid premature convergence but also improve the convergent speed in the late evolution;
- We proposed the CASAWOA-RBF as a tool to solve the ECT fault diagnosis problem.
2. Materials and Methods
2.1. Introduction of Detection Circuit for Electronic Current Transformers
- (1)
- Primary side short circuit: fluctuation of exceeds 10%;
- (2)
- Primary side short circuit: fluctuation of exceeds 10%;
- (3)
- Short circuit (in front of the secondary side): fluctuation of exceeds 10%;
- (4)
- Short circuit (in front of the secondary side): fluctuation of exceeds 10%;
- (5)
- Short circuit (at the back of the secondary side): fluctuation of and exceed 10% at the same time;
- (6)
- Short circuit (at the back of the secondary side): fluctuation of and exceed 10% at the same time;
- (7)
- CT Phase short circuit (secondary side): fluctuation of , , and more than 10% at the same time.
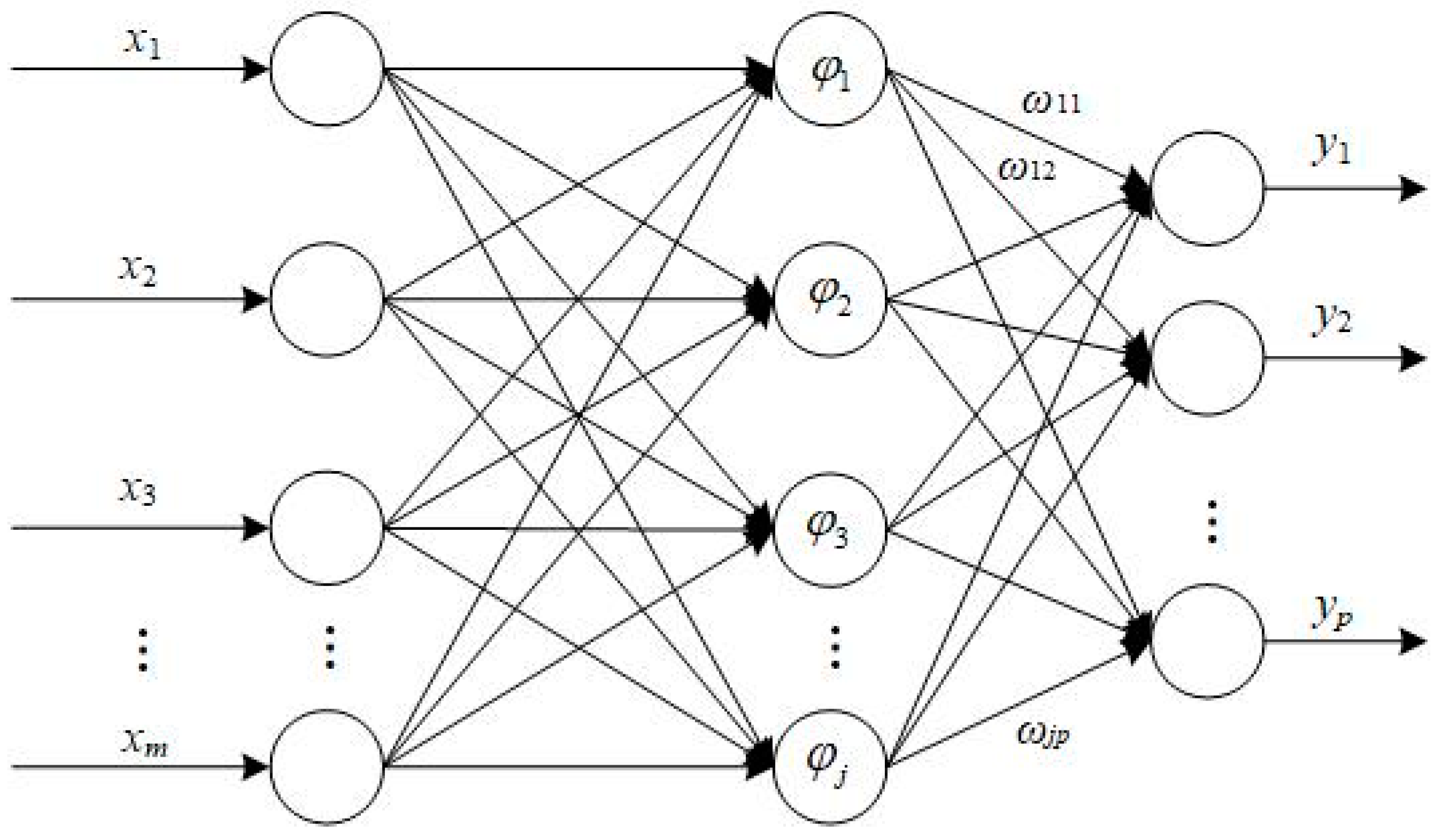
2.2. Introduction of RBF Neural Network
2.3. Introduction of Whale Optimization Algorithm (WOA)
2.3.1. Searching the Prey
2.3.2. Encircling the Prey
2.3.3. Bubble-Net Attacking Strategy
- (1)
- Shrinking Encircling Mechanism:
- (2)
- Logarithmic Spiral Updating Position:
3. Proposed Methods
3.1. Chaos Adaptive Simulated Annealing Based Whale Optimization Algorithm (CASAWOA)
3.1.1. Tent Chaotic Map Strategy
3.1.2. Nonlinear Convergence Factor
3.1.3. Adaptive Inertia Weight
3.1.4. The Improved Simulated Annealing Mechanism
| Algorithm 1 The Simulated Annealing Search Process in the CASAWOA |
| 1: = current solution; current solution fitness value 2: = new solution generated; new solution fitness value 3: Initialize the temperature . 4: Calculate the fitness value of two solutions 5: if > fitness of then 6: Accept 7: else 8: Calculate the probability by Equation (14) 9: end if 10: if rand (0, 1) > then 11: Accept 12: Upgrade the temperature by Equation (15) 13: else 14: Accept 15: end if |
3.1.5. Specific Steps of the CASAWOA
| Algorithm 2 The Pseudocode of the CASAWOA |
| 1: Initialize CASAWOA parameters 2: Initialize population according to Equation (10) 3: Calculate the fitness value of marked as 4: = the best search agent 5: for Iteration = 1 to do 6: for 7: Update and 8: if then 9: if then 10: Update the current solution by Equation (13) in the case of 11: else () 12: Select a random search agent 13: Update the current solution by Equation (2) 14: end if 15: if then 16: Update the current solution by Equation (13) in the case of 17: end if 18: end for 19: Check if there are solutions that exceed the search space and revise them. 20: Calculate the fitness of the new solution marked as 21: Update the solution according to the SA process in Algorithm 1 22: end for 23: Output |
3.2. CASAWOA Optimized RBF Neural Network (CASAWOA-RBF)
4. Simulation and Results
4.1. Results for Benchmark Functions
4.2. Performance of ECT Fault Diagnosis Based on CASAWOA Optimized RBF Network
4.2.1. Data Acquisition and Preprocessing
4.2.2. Compared Methods
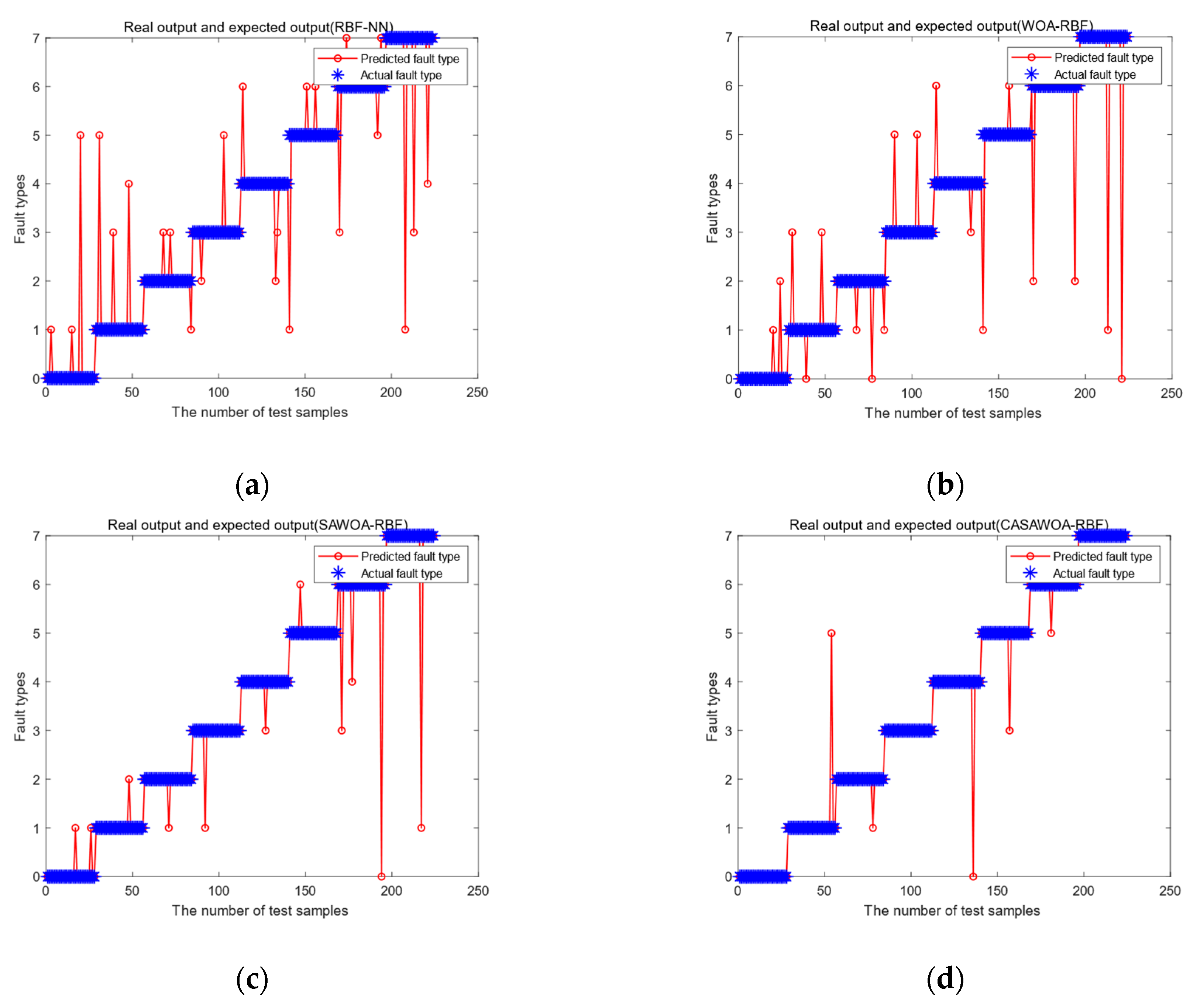
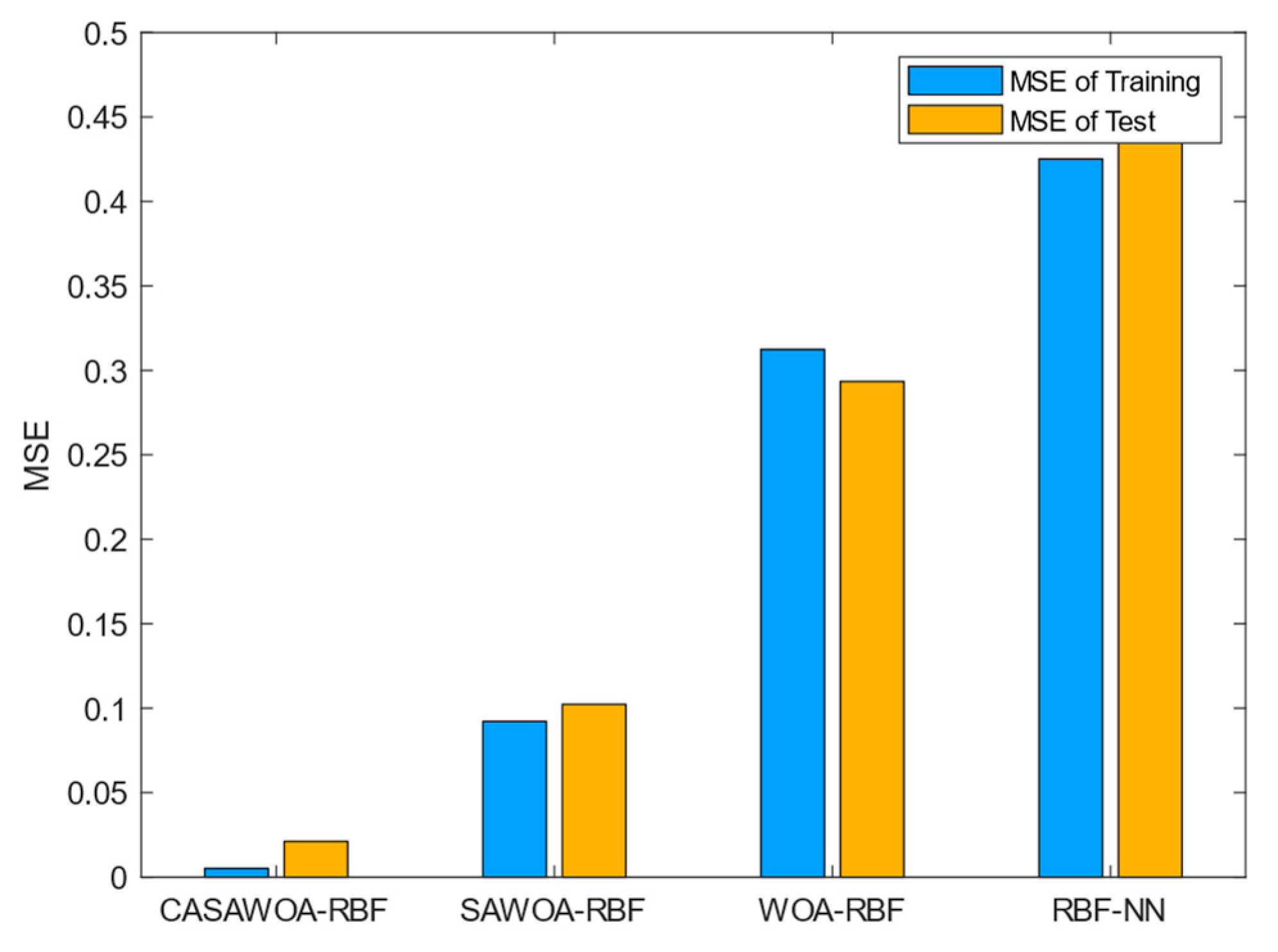
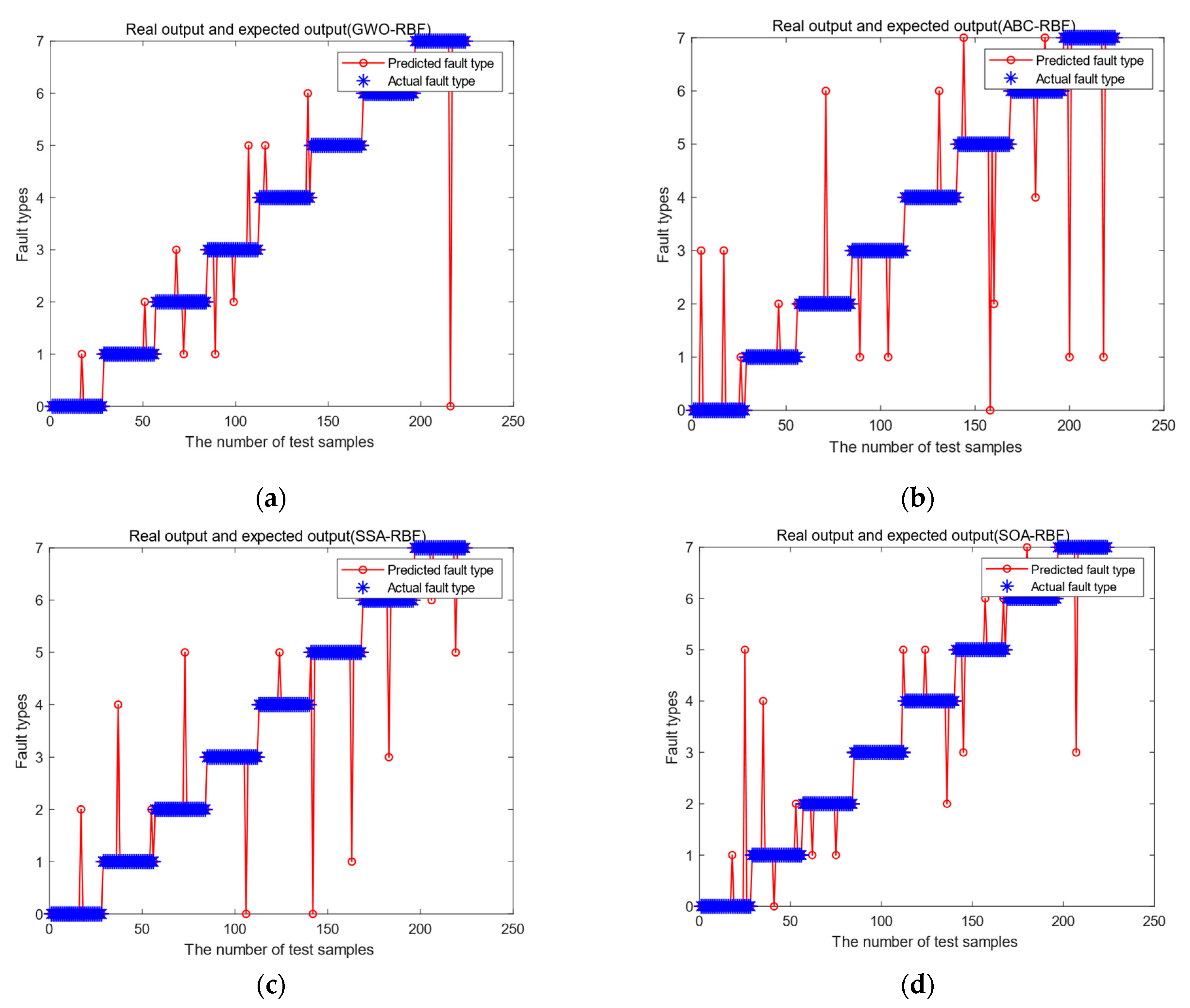
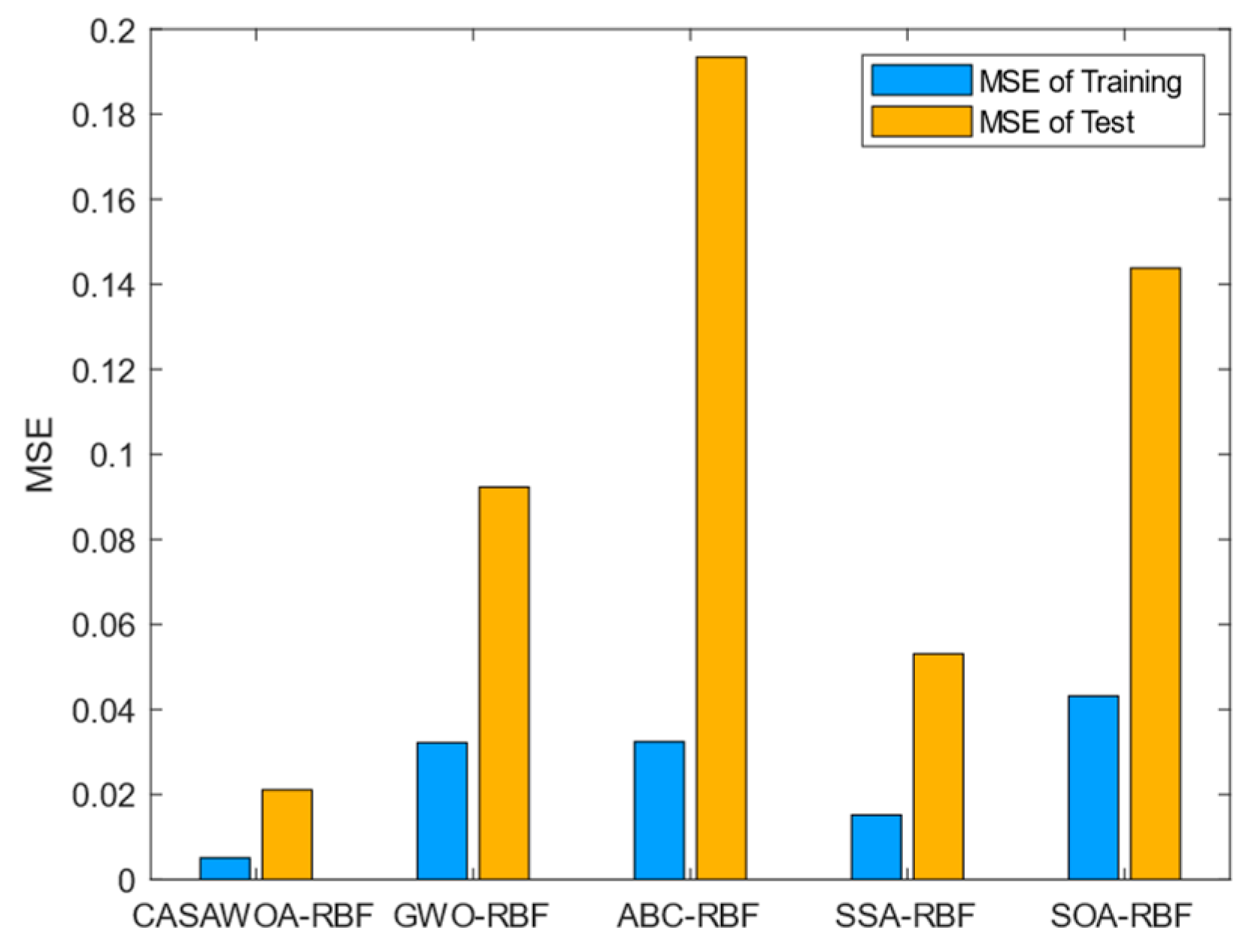
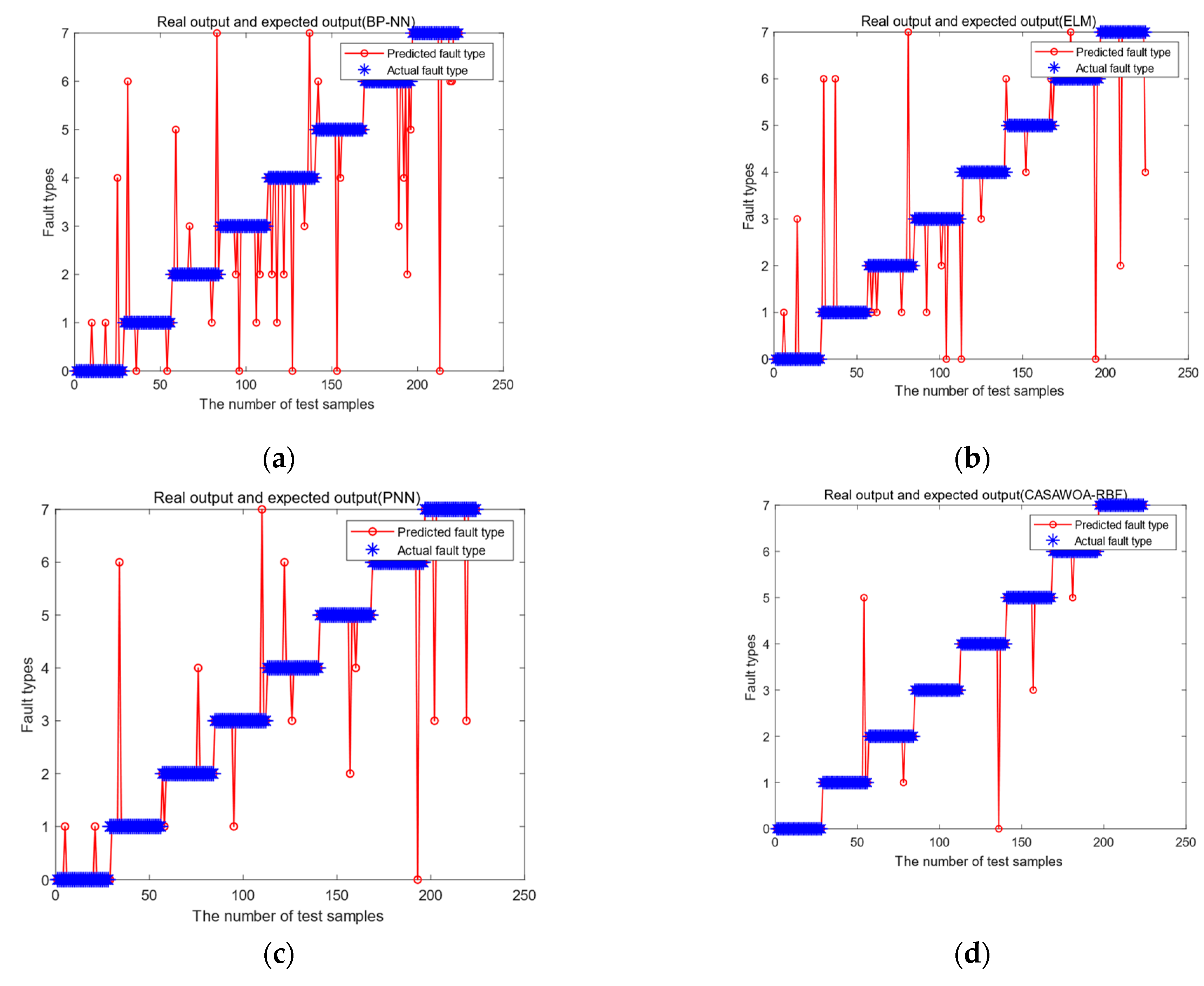
4.2.3. Results of Model Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, S.; Bryant, A.; Mawby, P.; Xiang, D.; Ran, L.; Tavner, P. An Industry-Based Survey of Reliability in Power Electronic Converters. IEEE Trans. Ind. Appl. 2011, 47, 1441–1451. [Google Scholar] [CrossRef]
- Wang, X.; Li, Q.; Li, C.; Yang, R.; Su, Q. Reliability assessment of the fault diagnosis methodologies for transformers and a new diagnostic scheme based on fault info integration. IEEE Trans. Dielectr. Electr. Insul. 2013, 20, 2292–2298. [Google Scholar] [CrossRef]
- Li, J.; Li, G.; Hai, C.; Guo, M. Transformer Fault Diagnosis Based on Multi-Class AdaBoost Algorithm. IEEE Access 2022, 10, 1522–1532. [Google Scholar] [CrossRef]
- Dai, J.; Song, H.; Sheng, G.; Jiang, X. Dissolved gas analysis of insulating oil for power transformer fault diagnosis with deep belief network. IEEE Trans. Dielectr. Electr. Insul. 2017, 24, 2828–2835. [Google Scholar] [CrossRef]
- Liu, Y.; Han, W.; Liu, F.; Li, Q.; Zhou, N. A collaborative diagnosis of abrupt-changing fault of electronic instrument transformer based on wavelet transform and WVD. Power Syst. Prot. Control 2019, 47, 163–170. [Google Scholar]
- Wang, H.; Tang, K.; Xu, R.; Zhu, X.; Li, X. Research on digital substation electronic transformer gradual variability fault diagnosis method. Power Syst. Prot. Control 2012, 40, 53–58. [Google Scholar]
- Chen, T.; Tian, G.; Sophian, A. Feature extraction and selection for defect classification of pulsed eddy current NDT. NDT E Int. 2008, 41, 467–476. [Google Scholar] [CrossRef]
- Xiong, X.; He, N.; Yu, J. Diagnosis of abrupt-changing fault of electronic instrument transformer in digital substation based on wavelet transform. Power Syst. Technol. 2010, 7, 181–185. [Google Scholar]
- Yu, T.; Wang, H.; Chen, X.; Tan, K. Fault Diagnosis and Fault Tolerant Method of Single Stage Matrix Type Power Electronic Transformer. In Proceedings of the 2021 IEEE 1st International Power Electronics and Application Symposium (PEAS), Beijing, China, 13–15 November 2021. [Google Scholar]
- Mian, T.; Choudhary, A.; Fatima, F. Vibration and infrared thermography based multiple fault diagnosis of bearing using deep learning. Nondestruct. Test. Eval. 2022, 1–22. [Google Scholar] [CrossRef]
- Chine, W.; Mellit, A.; Lughi, V.; Malek, A.; Sulligoi, G.; Pavan, A.M. A novel fault diagnosis technique for photovoltaic systems based on artificial neural networks. Renew Energy 2016, 90, 501–512. [Google Scholar] [CrossRef]
- Li, S.; Wu, G.; Gao, B.; Hao, C.; Xin, D.; Yin, X. Interpretation of DGA for transformer fault diagnosis with complementary SaE-ELM and arctangent transform. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 586–595. [Google Scholar] [CrossRef]
- Duan, H.; Xie, H.; Lu, Y. Transformer On-line Monitoring and Fault Diagnosis System Based on DRNN and PAS. In Proceedings of the 2019 IEEE 9th International Conference on Electronics Information and Emergency Communication (ICEIEC), Beijing, China, 12–14 July 2019. [Google Scholar]
- Li, J.; Zhang, Q.; Wang, K.; Wang, J.; Zhou, T.; Zhang, Y. Optimal dissolved gas ratios selected by genetic algorithm for power transformer fault diagnosis based on support vector machine. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 1198–1206. [Google Scholar] [CrossRef]
- Qu, L.; Zhou, H.; Liu, C.; Lu, Z. Study on Multi-RBF-SVM for Transformer Fault Diagnosis. In Proceedings of the 2018 17th International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), Wuxi, China, 19–23 October 2018. [Google Scholar]
- Li, Z.; Chen, W.; Shan, J.; Yang, Z.; Cao, L. Enhanced Distributed Parallel Firefly Algorithm Based on the Taguchi Method for Transformer Fault Diagnosis. Energies 2022, 15, 3017. [Google Scholar] [CrossRef]
- Meng, K.; Dong, Z.; Wang, D.; Wong, K. A Self-Adaptive RBF Neural Network Classifier for Transformer Fault Analysis. IEEE Trans. Power Syst. 2010, 25, 1350–1360. [Google Scholar] [CrossRef]
- Singla, P.; Subbarao, K.; Junkins, J. Direction-dependent learning approach for radial basis function networks. IEEE Trans. Neural Netw. 2007, 18, 203–222. [Google Scholar] [CrossRef]
- Chen, H.; Xu, Y.; Wang, M. A balanced whale optimization algorithm for constrained engineering design problems. Appl. Math. Model. 2019, 71, 45–59. [Google Scholar] [CrossRef]
- Lee, J.H.; Kim, J.W.; Song, J.Y.; Kim, Y.J.; Jung, S.Y. A novel memetic algorithm using modified particle swarm optimization and mesh adaptive direct search for PMSM design. IEEE Trans. Magn. 2015, 52, 1–4. [Google Scholar] [CrossRef]
- Choi, K.; Jang, D.H.; Kang, S.I.; Lee, J.H.; Chung, T.K.; Kim, H.S. Hybrid algorithm combing genetic algorithm with evolution strategy for antenna design. IEEE Trans. Magn. 2015, 52, 1–4. [Google Scholar] [CrossRef]
- Li, X.; Ma, S.; Yang, G. Synthesis of difference patterns for monopulse antennas by an improved cuckoo search algorithm. IEEE Antennas Wirel. Propag. Lett. 2016, 16, 141–144. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kulkarni, S.; Benediktsson, J.A.; Yang, X.S. A novel approach for multispectral satellite image classification based on the bat algorithm. IEEE Geosci. Remote Sens. Lett. 2016, 13, 599–603. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Yang, X.; Tao, L.; Yang, L. Transformer Fault Diagnosis Model Based on Improved Gray Wolf Optimizer and Probabilistic Neural Network. Energies 2021, 14, 3029. [Google Scholar] [CrossRef]
- Liu, X.; He, H. Fault Diagnosis for TE Process Using RBF Neural Network. IEEE Access 2021, 9, 118453–118460. [Google Scholar] [CrossRef]
- Li, Y.; Qiang, S.; Zhuang, X.; Kaynak, O. Robust and adaptive backstepping control for nonlinear systems using RBF neural networks. IEEE Trans. Neural Netw. 2004, 15, 693–701. [Google Scholar] [CrossRef] [PubMed]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Yang, D.; Li, G.; Cheng, G. On the efficiency of chaos optimization algorithms for global optimization. Chaos Solitons Fractals 2007, 34, 1366–1375. [Google Scholar] [CrossRef]
- Sun, H.; Xiao, H.; Hu, Q. Analysis for load distribution of tandem cold rolling based on constrained multi-objective evolutionary algorithm. China Mech. Eng. 2017, 28, 93–100. [Google Scholar]
- Kirpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1987, 220, 606–615. [Google Scholar]
- Lee, C.Y. Fast simulated annealing with a multivariate Cauchy distribution and the configuration’s initial temperature. J. Korean Phys. Soc. 2015, 66, 1457–1466. [Google Scholar] [CrossRef]
- Mafarja, M.M.; Mirjalili, S. Hybrid Whale Optimization Algorithm with simulated annealing for feature selection. Neurocomputing 2017, 260, 302–312. [Google Scholar] [CrossRef]
- Han, H.; Zhang, L.; Hou, Y.; Qiao, F. Nonlinear Model Predictive Control Based on a Self-Organizing Recurrent Neural Network. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 402–415. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Kay, B.; Karaboga, D. A modified Artificial Bee Colony algorithm for real-parameter optimization. Inf. Sci. 2012, 192, 120–142. [Google Scholar]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Dhiman, G.; Kumar, V. Seagull optimization algorithm: Theory and its applications for large-scale industrial engineering problems. Knowl. Based Syst. 2019, 165, 169–196. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Steps | Description |
|---|---|
| Step 1 | Randomly generate the initial values , and record them in the array |
| Step 2 | Generating the sequences of iteratively according to Equation (10). |
| Step 3 | Check if the termination condition is reached. If yes, go to Step 5; otherwise: if or , go to Step 4, otherwise go back to Step 2. |
| Step 4 | Change the initial value , j = j + 1, where is the random value. |
| Step 5 | Stop. |
| Algorithms | Population Size | Maximum Iteration Number | Initial Temperature | η | Nonlinear Adjustment Factor | Annealing Factor |
|---|---|---|---|---|---|---|
| WOA | 30 | 2000 | - | - | - | |
| SAWOA | 30 | 2000 | 100 | - | - | 0.93 |
| CASAWOA | 30 | 2000 | 100 | 0.1 | 1.6 |
| ID | ID | Dimension | Range | Optimum |
|---|---|---|---|---|
| F1 | 30 | [−100, 100] | 0 | |
| F2 | 30 | [−15, 15] | 0 | |
| F3 | 30 | [−5.1, 5.1] | 0 | |
| F4 | 30 | [−32, 32] | 0 | |
| F5 | 30 | [−600, 600] | 0 |
| ID | WOA | SAWOA | CASAWOA | |||
|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | Mean | SD | |
| F1 | 1.62 × 10−17 | 9.66 × 10−18 | 9.29 × 10−18 | 5.27 × 10−18 | 00 × 10+00 | 00 × 10+00 |
| F2 | 0.0355878 | 0.0381329 | 0.0257802 | 0.0288629 | 5.21 × 10−6 | 1.30 × 10−5 |
| F3 | 00 × 10+00 | 00 × 10+00 | 00 × 10+00 | 00 × 10+00 | 00 × 10+00 | 00 × 10+00 |
| F4 | 3.84 × 10−15 | 1.34 × 10−15 | 1.24 × 10−15 | 1.09 × 10−15 | 8.88 × 10−16 | 00 × 10+00 |
| F5 | 1.1 × 10−13 | 6.7 × 10−13 | 8.88 × 10−17 | 1.72 × 10−16 | 00 × 10+00 | 00 × 10+00 |
| Index | /A | /mA | /mA | /V | /V | /v | /V | Fault Type |
|---|---|---|---|---|---|---|---|---|
| 1 | 1.064 | 98.23 | 99.98 | 173.1 | 173.1 | 1.414 | 1.413 | Primary side short circuit |
| 2 | 1.031 | 121.71 | 100.03 | 173.1 | 173.1 | 0.426 | 1.414 | Primary side short circuit |
| 3 | 1.054 | 98.35 | 124.34 | 173.1 | 173.1 | 1.413 | 0.332 | Short circuit (in front of the secondary side) |
| 4 | 1.092 | 62.32 | 100.0 | 173.2 | 173.2 | 1.411 | 1.411 | Short circuit (in front of the secondary side) |
| 5 | 1.002 | 99.31 | 51.01 | 173.1 | 173.1 | 1.413 | 1.413 | Short circuit (at the back of the secondary side) |
| 6 | 1.032 | 12.16 | 99.86 | 173.2 | 173.1 | 0.018 | 1.414 | Short circuit (at the back of the secondary side) |
| 7 | 1.066 | 100.13 | 4.316 | 173.2 | 173.1 | 1.413 | 0.054 | Phase short circuit (Secondary side) |
| 8 | 1.126 | 50.06 | 50.4 | 173.1 | 173.2 | 0.707 | 0.708 | Normal |
| Index | Fault Type | Fault Code |
|---|---|---|
| F1 | Normal | 0000 |
| F2 | Primary side short circuit | 0001 |
| F3 | Primary side short circuit | 0010 |
| F4 | Short circuit (in front of secondary side) | 0011 |
| F5 | Short circuit (in front of secondary side) | 0100 |
| F6 | Short circuit (at the back of the secondary side) | 0101 |
| F7 | Short circuit (at the back of the secondary side) | 0110 |
| F8 | Phase short circuit (Secondary side) | 0111 |
| Methods | Parameters Settings |
|---|---|
| WOA-RBF | |
| SAWOA-RBF | , annealing factor = 0.93 |
| CASAWOA-RBF | , factor nonlinear adjustment factor = 1.6 |
| GWO-RBF | |
| ABC-RBF | |
| SSA-RBF | |
| SOA-RBF | |
| ELM | Number of hidden neuron = 20 |
| PNN | Smoothing factor = 0.06 |
| Methods | Accuracy (%) |
|---|---|
| RBF-NN | 89.29% |
| WOA-RBF | 91.52% |
| SAWOA-RBF | 95.09% |
| CASAWOA-RBF | 97.78% |
| Methods | Accuracy (%) |
|---|---|
| WOA-RBF | 91.52% |
| SAWOA-RBF | 95.09% |
| GWO-RBF | 95.54% |
| ABC-RBF | 92.86% |
| SSA-RBF | 95.09% |
| SOA-RBF | 93.30% |
| CASAWOA-RBF | 97.78% |
| Methods | Accuracy (%) |
|---|---|
| BP-NN | 86.61% |
| ELM | 91.07% |
| PNN | 93.30% |
| CASAWOA-RBF | 97.78% |
| ECT Faults | RBF-NN | WOA-RBF | SAWOA-RBF | GWO-RBF | ABC-RBF | SSA-RBF | SOA-RBF | BPNN | ELM | PNN | CASAWOA-RBF |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 89.29% | 92.86% | 92.86% | 96.43% | 89.29% | 96.43% | 92.86% | 89.29% | 92.86% | 92.86% | 100% |
| F2 | 89.29% | 89.29% | 96.43% | 96.43% | 92.86% | 92.86% | 89.29% | 89.29% | 92.86% | 92.86% | 96.43% |
| F3 | 89.29% | 89.29% | 96.43% | 92.86% | 96.43% | 96.43% | 92.86% | 85.71% | 85.71% | 92.86% | 96.43% |
| F4 | 92.86% | 92.86% | 96.43% | 89.29% | 92.86% | 96.43% | 96.43% | 85.71% | 89.29% | 92.86% | 100% |
| F5 | 89.29% | 92.86% | 96.43% | 92.86% | 96.43% | 96.43% | 92.86% | 78.57% | 89.29% | 92.86% | 96.43% |
| F6 | 89.29% | 89.29% | 96.43% | 100% | 89.29% | 92.86% | 89.29% | 89.29% | 92.86% | 92.86% | 96.43% |
| F7 | 85.71% | 92.86% | 89.29% | 100% | 92.86% | 92.86% | 92.43% | 85.71% | 92.86% | 96.43% | 96.43% |
| F8 | 89.29% | 92.86% | 96.43% | 96.43% | 92.86% | 92.86% | 92.86% | 89.29% | 92.86% | 92.86% | 100% |
| ECT Faults | RBF-NN | WOA-RBF | SAWOA-RBF | GWO-RBF | ABC-RBF | SSA-RBF | SOA-RBF | BPNN | ELM | PNN | CASAWOA-RBF |
|---|---|---|---|---|---|---|---|---|---|---|---|
| F1 | 100.00% | 89.66% | 96.30% | 96.43% | 96.15% | 93.10% | 96.30% | 80.65% | 89.66% | 92.86% | 96.55% |
| F2 | 83.33% | 83.33% | 84.38% | 90.00% | 83.87% | 96.30% | 89.29% | 83.33% | 83.87% | 86.67% | 96.43% |
| F3 | 92.59% | 89.29% | 96.43% | 92.86% | 90.00% | 93.10% | 92.86% | 82.76% | 92.31% | 96.30% | 100% |
| F4 | 81.25% | 89.66% | 93.10% | 96.15% | 92.86% | 96.43% | 93.10% | 88.89% | 92.59% | 89.66% | 96.55% |
| F5 | 92.59% | 100.00% | 96.43% | 100.00% | 96.43% | 96.43% | 96.30% | 88.00% | 92.59% | 92.86% | 100% |
| F6 | 86.21% | 92.59% | 100.00% | 93.33% | 100.00% | 89.66% | 89.29% | 92.59% | 100.00% | 100.00% | 93.10% |
| F7 | 88.89% | 92.86% | 96.15% | 96.55% | 92.86% | 96.43% | 93.10% | 85.71% | 86.67% | 93.10% | 100% |
| F8 | 92.59% | 96.30% | 100.00% | 100.00% | 92.86% | 100.00% | 96.43% | 92.59% | 92.86% | 96.30% | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, P.; Wang, T.; Yang, H.; Meng, C.; Zhang, H.; Cheng, L. The Performance of Electronic Current Transformer Fault Diagnosis Model: Using an Improved Whale Optimization Algorithm and RBF Neural Network. Electronics 2023, 12, 1066. https://doi.org/10.3390/electronics12041066
Yang P, Wang T, Yang H, Meng C, Zhang H, Cheng L. The Performance of Electronic Current Transformer Fault Diagnosis Model: Using an Improved Whale Optimization Algorithm and RBF Neural Network. Electronics. 2023; 12(4):1066. https://doi.org/10.3390/electronics12041066
Chicago/Turabian StyleYang, Pengju, Taoyun Wang, Heng Yang, Chuipan Meng, Hao Zhang, and Li Cheng. 2023. "The Performance of Electronic Current Transformer Fault Diagnosis Model: Using an Improved Whale Optimization Algorithm and RBF Neural Network" Electronics 12, no. 4: 1066. https://doi.org/10.3390/electronics12041066