
An Improved Droop Control Strategy for Grid-Connected Inverter Applied in Grid Voltage Inter-Harmonics and Fundamental Frequency Fluctuation

Abstract
:1. Introduction
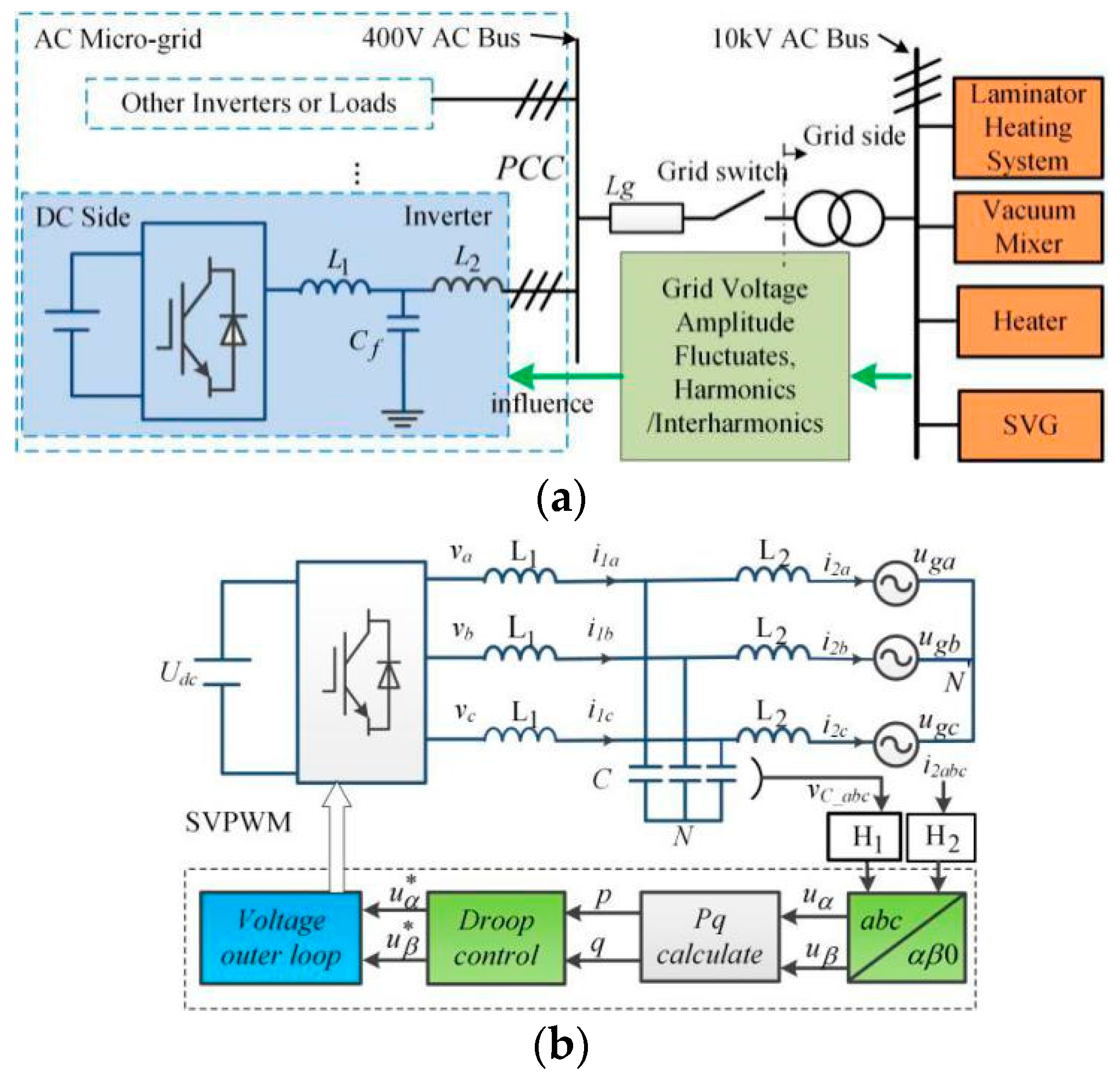
2. Modeling of Grid-Connected Inverters
2.1. System Modeling
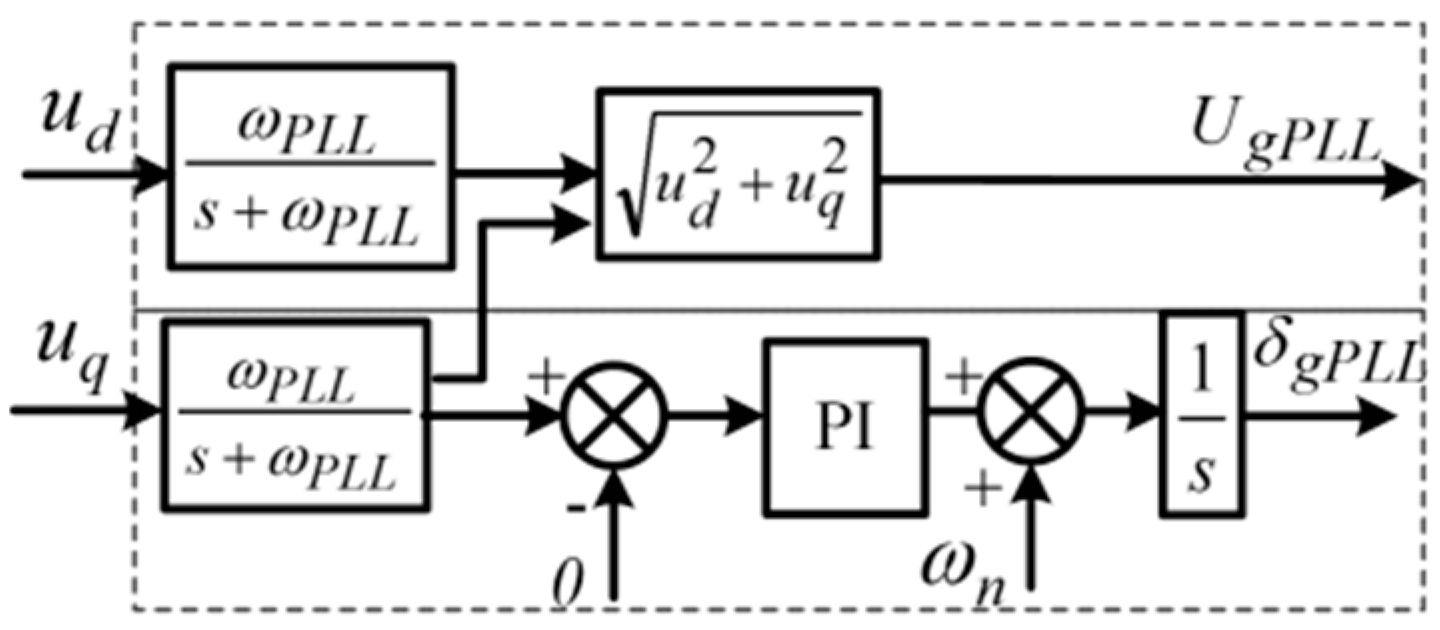
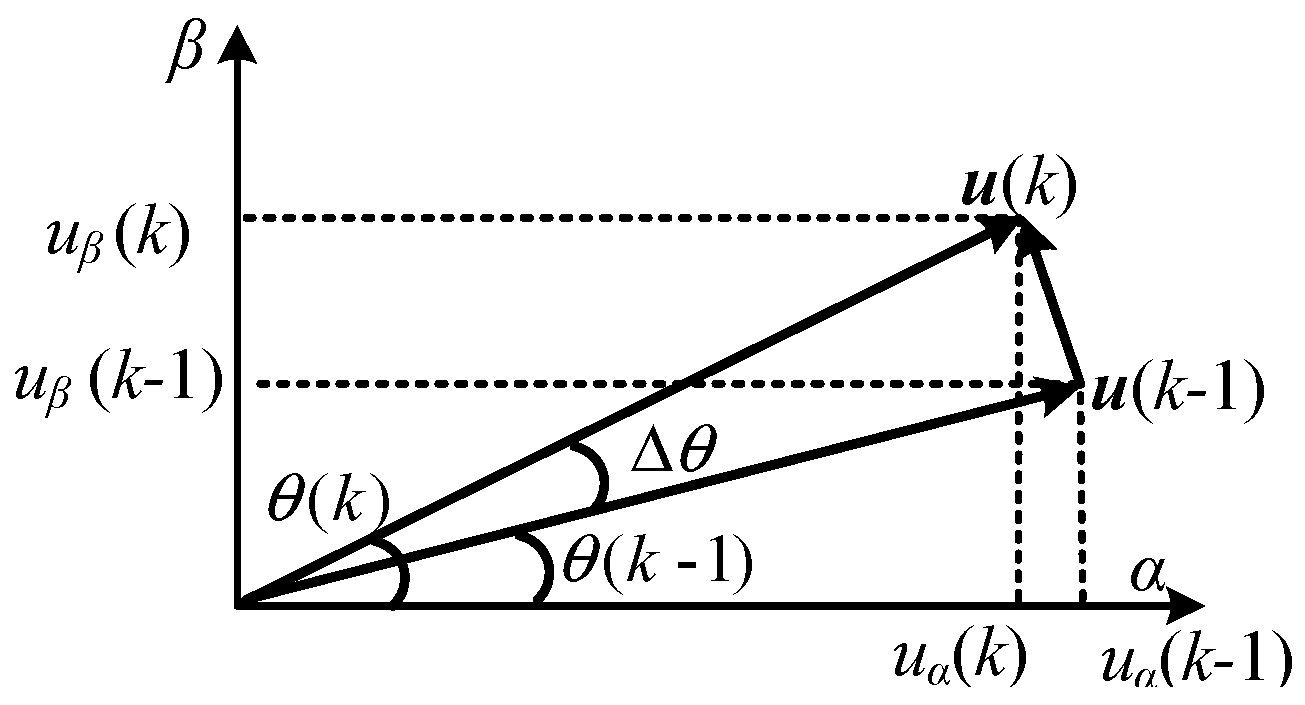
2.2. Instantaneous Frequency Detection
3. Control Strategy Based on Incomplete Current Differential Feedback
- (1)
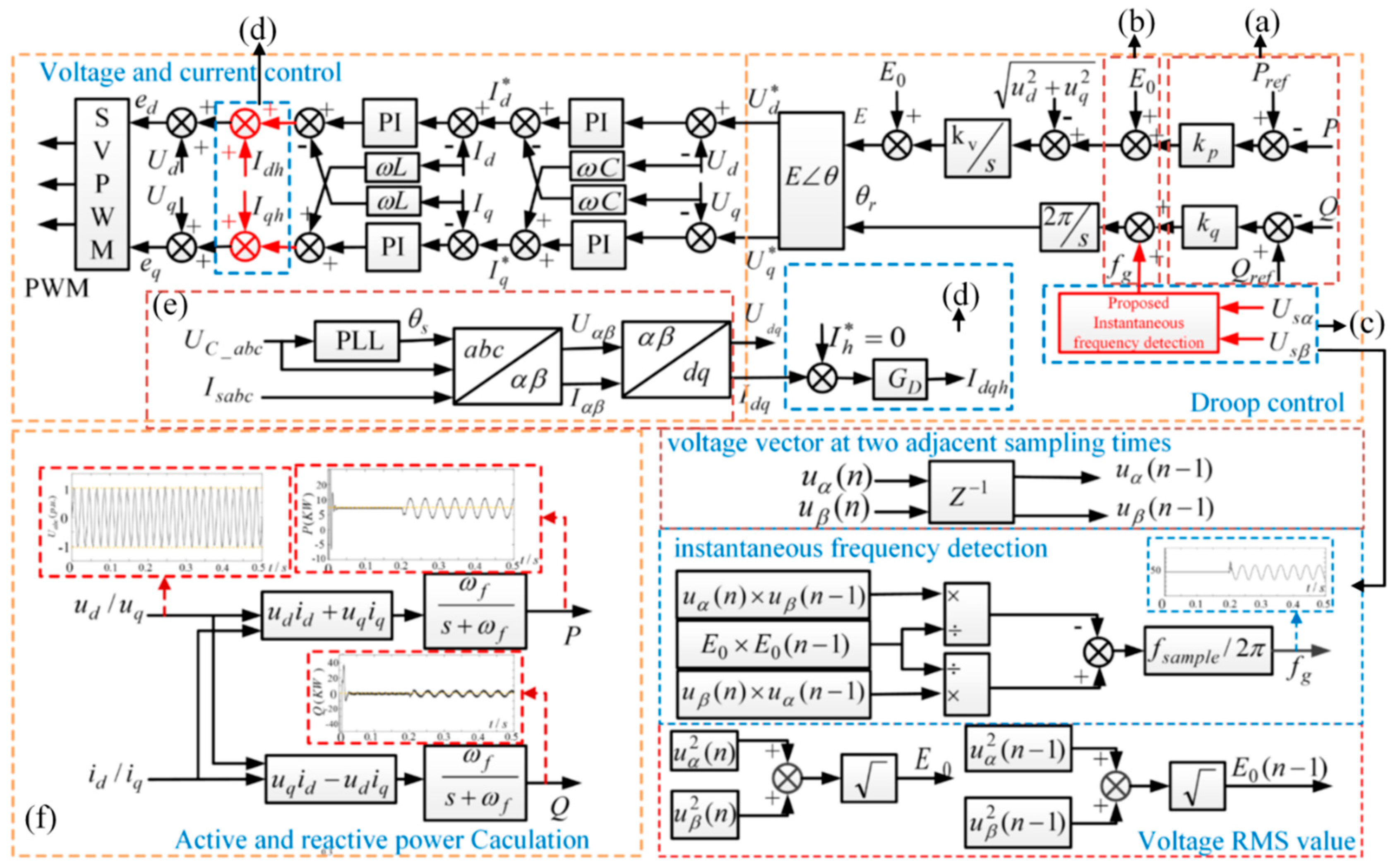
- Coordinate transformation: The proposed control strategy is developed under the dq frame, hence the fundamental parts behave as dc components and the electrical angle of the fundamental grid voltage is obtained by uq after a low-pass filter, as shown in Figure 2, to avoid the influence of distorted grid voltage. The current Idq and Udq can be obtained in the synchronous reference frame based on grid voltage Iabc and Uabc, shown in Figure 5a.
- (2)
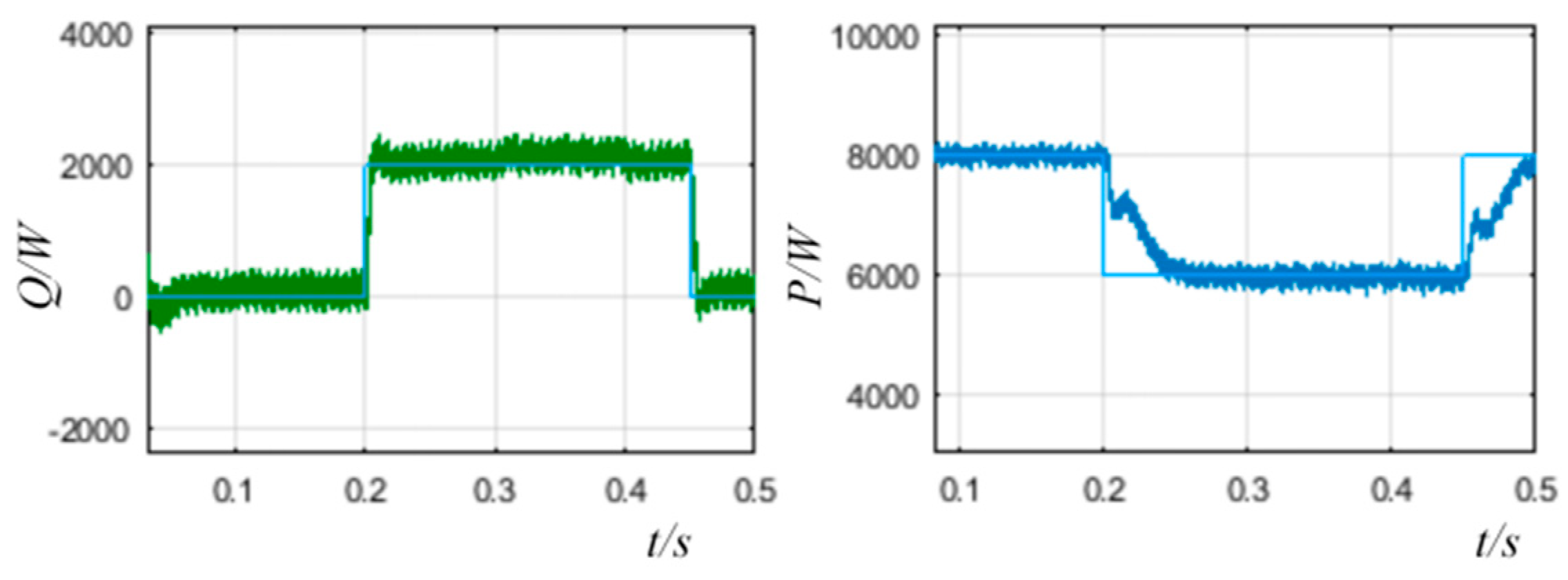
- Feed-forward of grid instantaneous frequency and voltage magnitude: Power flow control in grid-connected mode may be influenced by fluctuation of grid frequency and voltage magnitude. Meanwhile, a tracking error exists in the reactive power control loop. The feed-forward of grid frequency and voltage magnitude is applied to suppress grid fluctuation impacts. Frequency is obtained by instantaneous frequency detection method, as described in Section 2.2 and shown in Figure 5b, instead of PLL.
- (3)
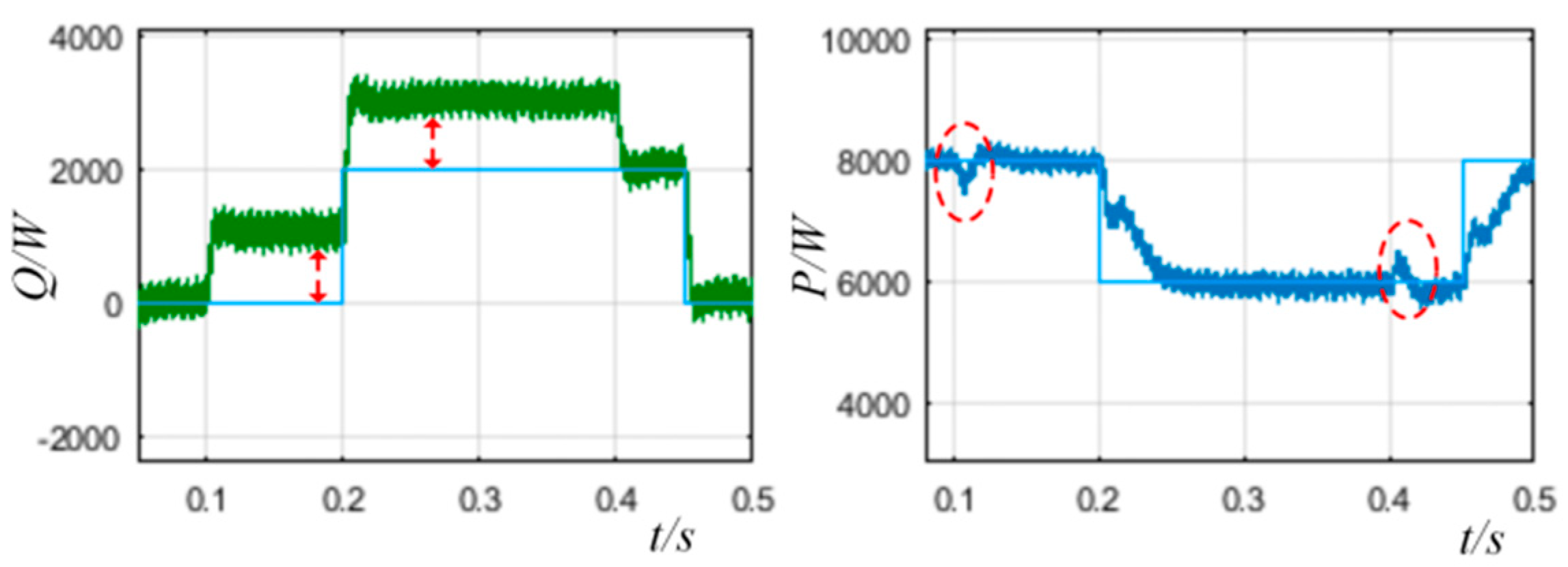
- Fundamental droop control (shown in Figure 5c): According to the description in Section 2.1, the power flow control in the grid-connected mode of traditional droop control is mainly affected by two aspects—reactive power tracking static error and grid frequency and grid voltage amplitude fluctuations.
- (4)
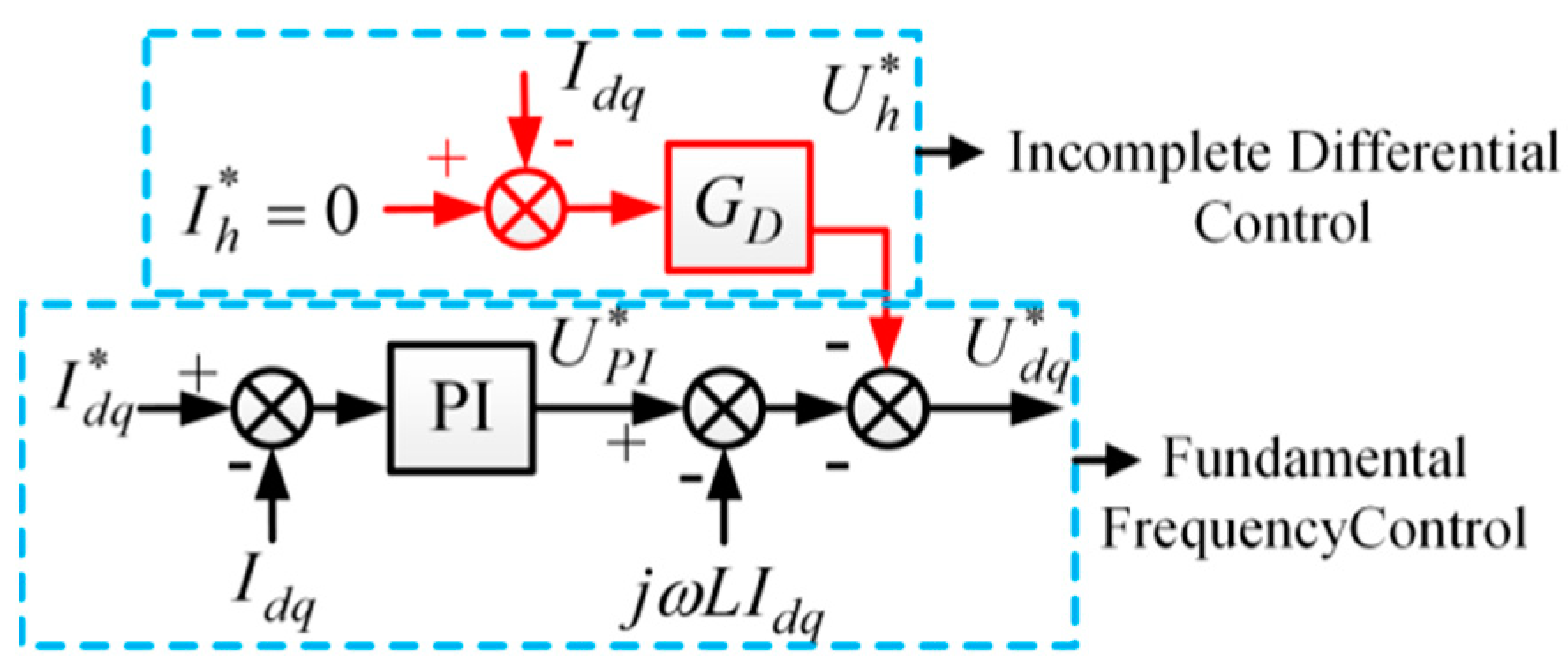
- Incomplete Differential Control
4. Results
4.1. Simulation Results
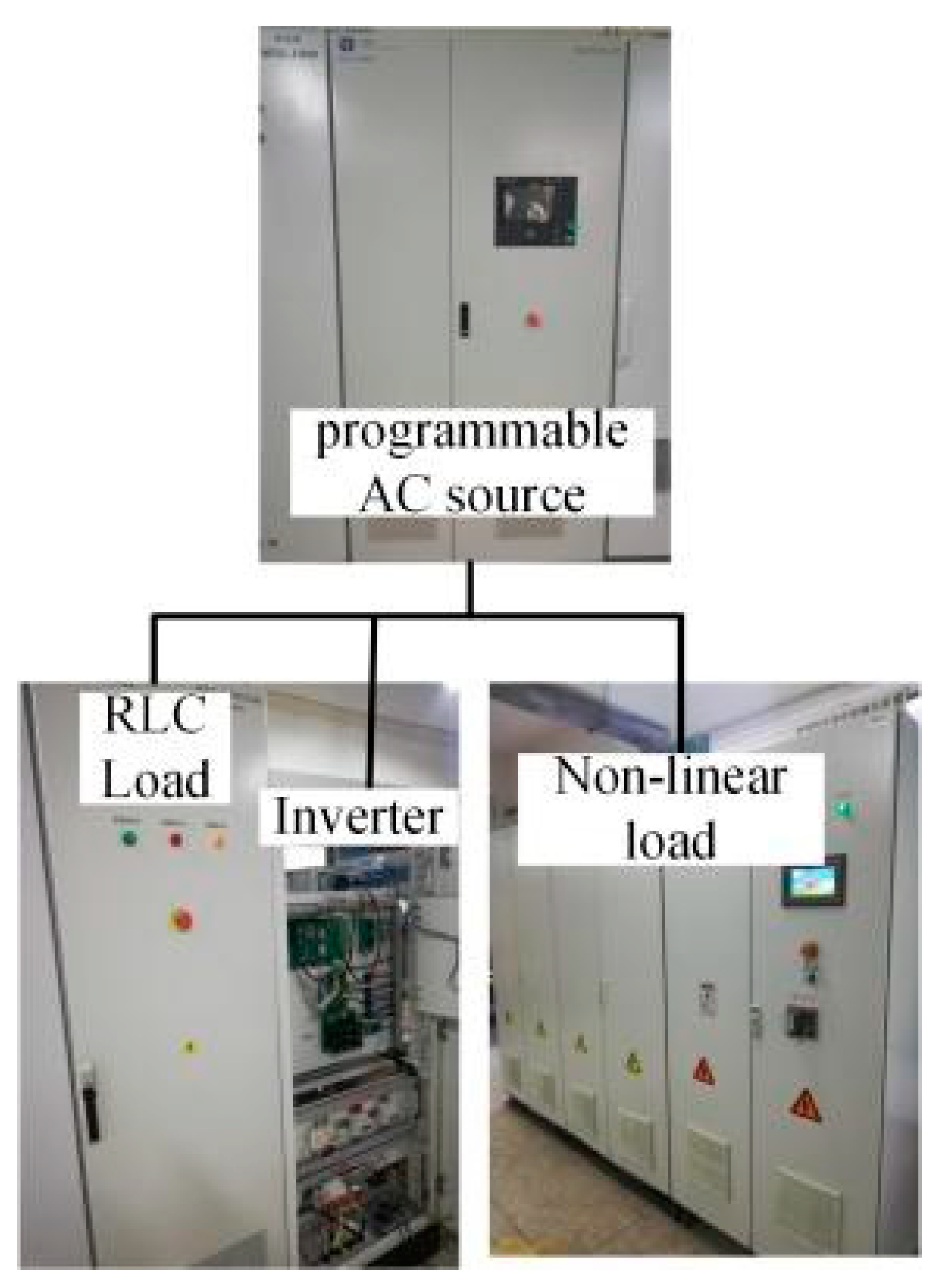
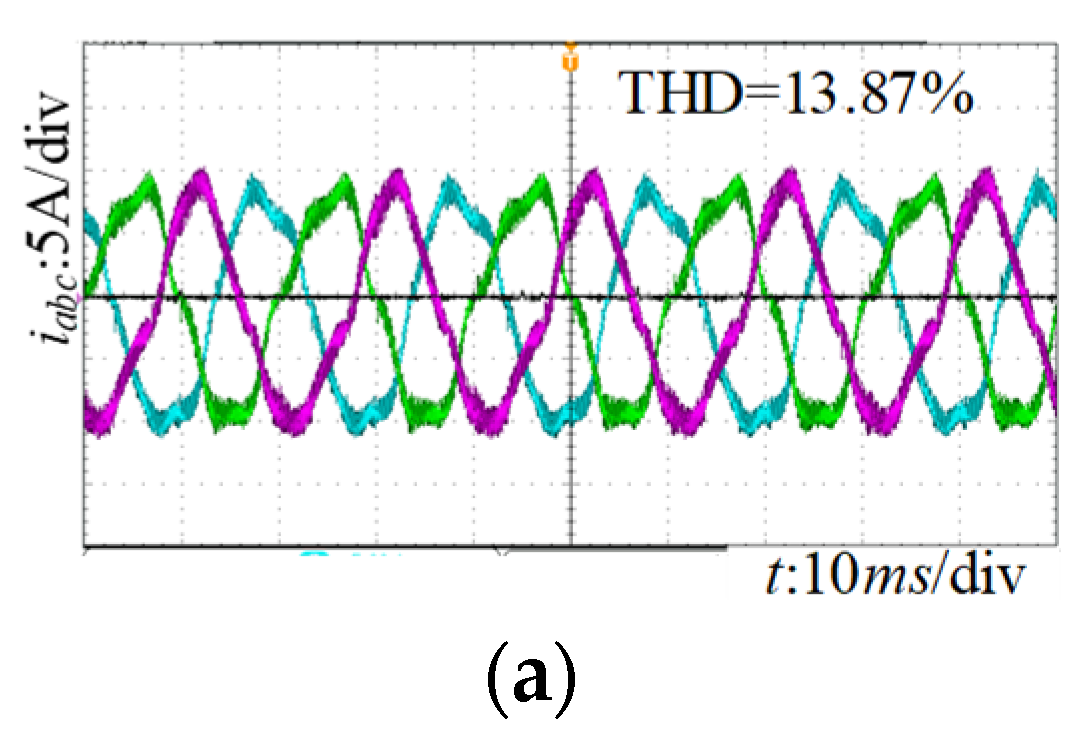
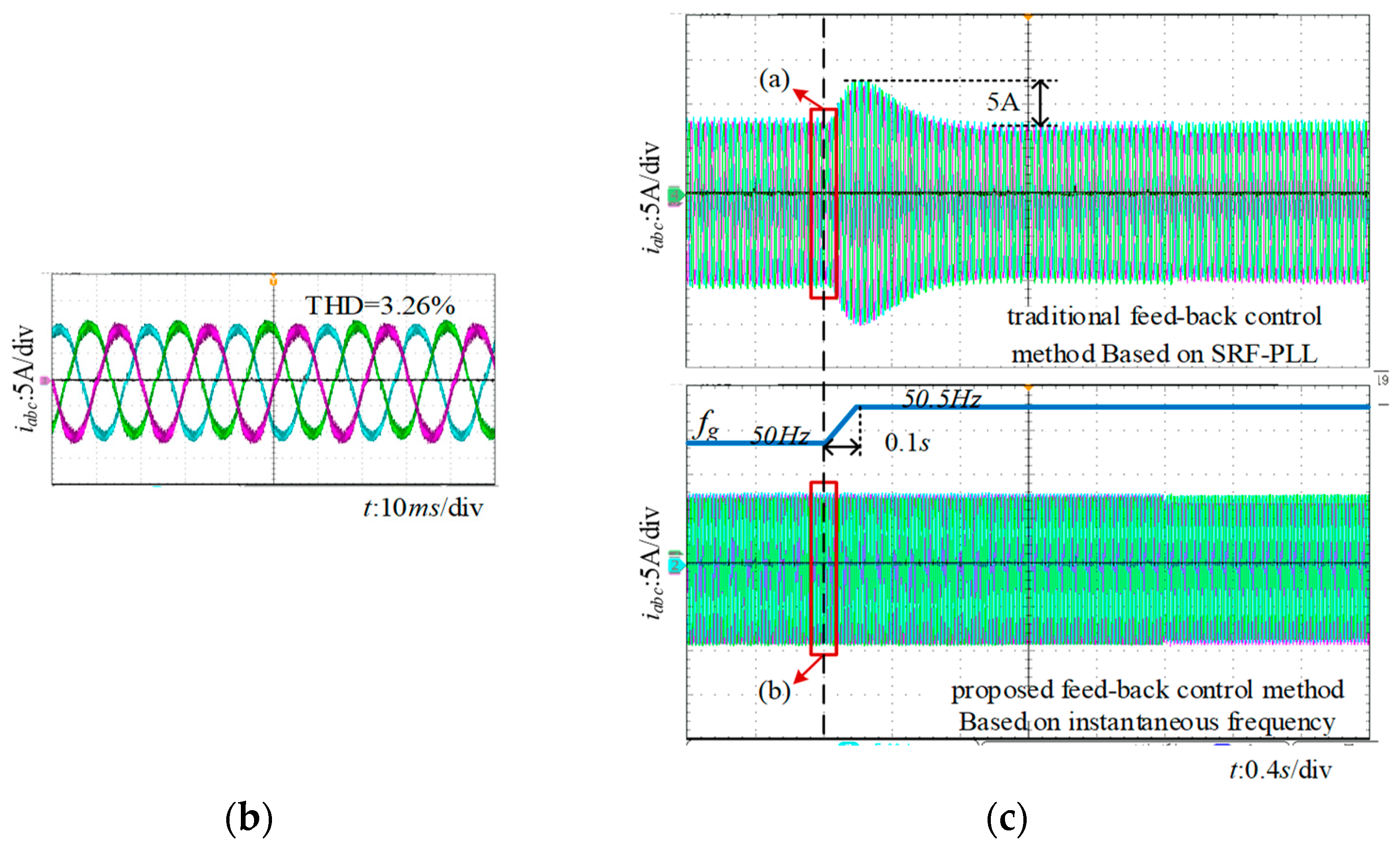
4.2. Experimental Results
5. Conclusions
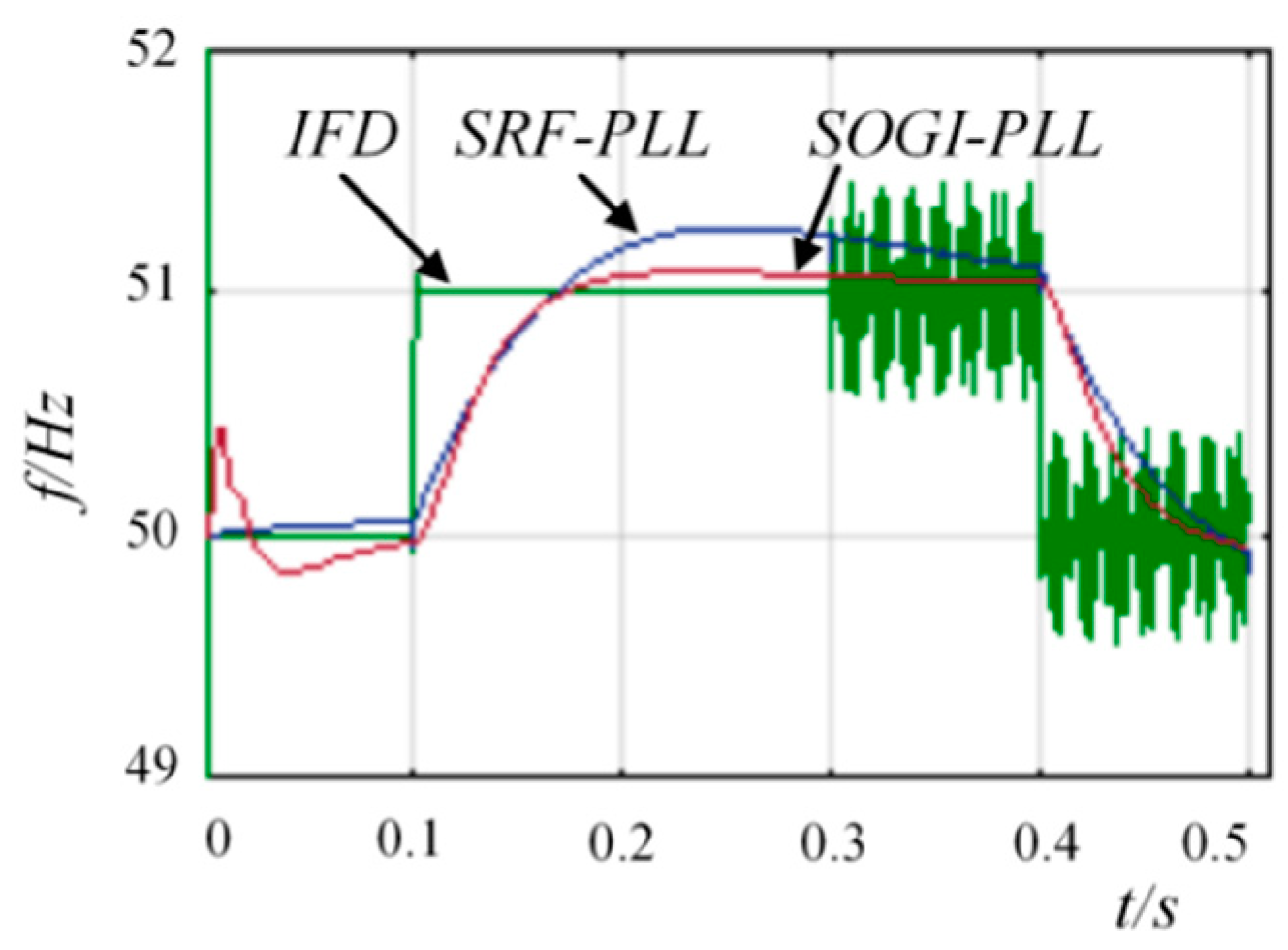
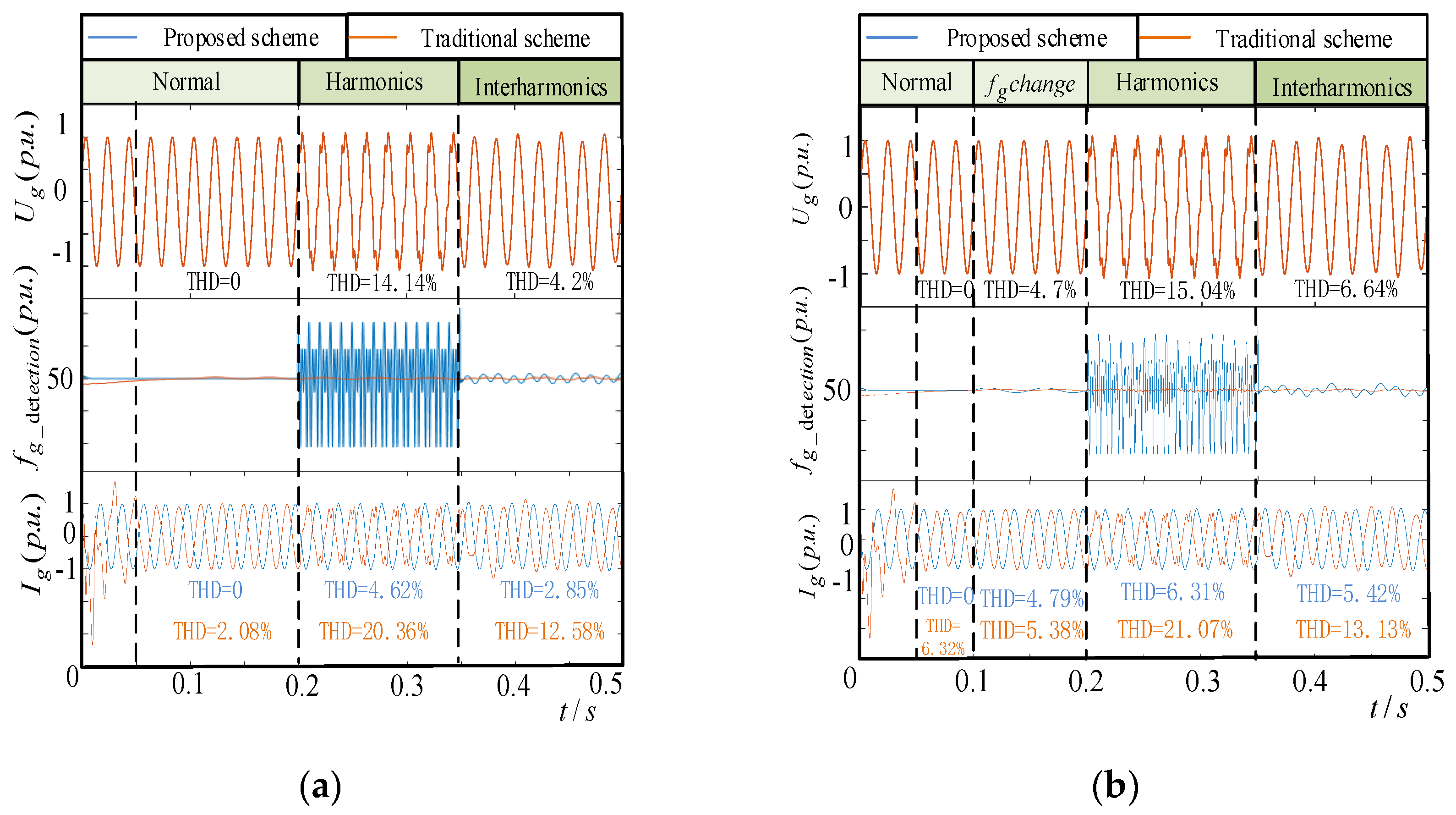
- The proposed instantaneous frequency detection method has a faster response and better precision than SRF- and SOGI-PLL systems under grid voltage conditions with fundamental frequency fluctuations and inter-harmonics.
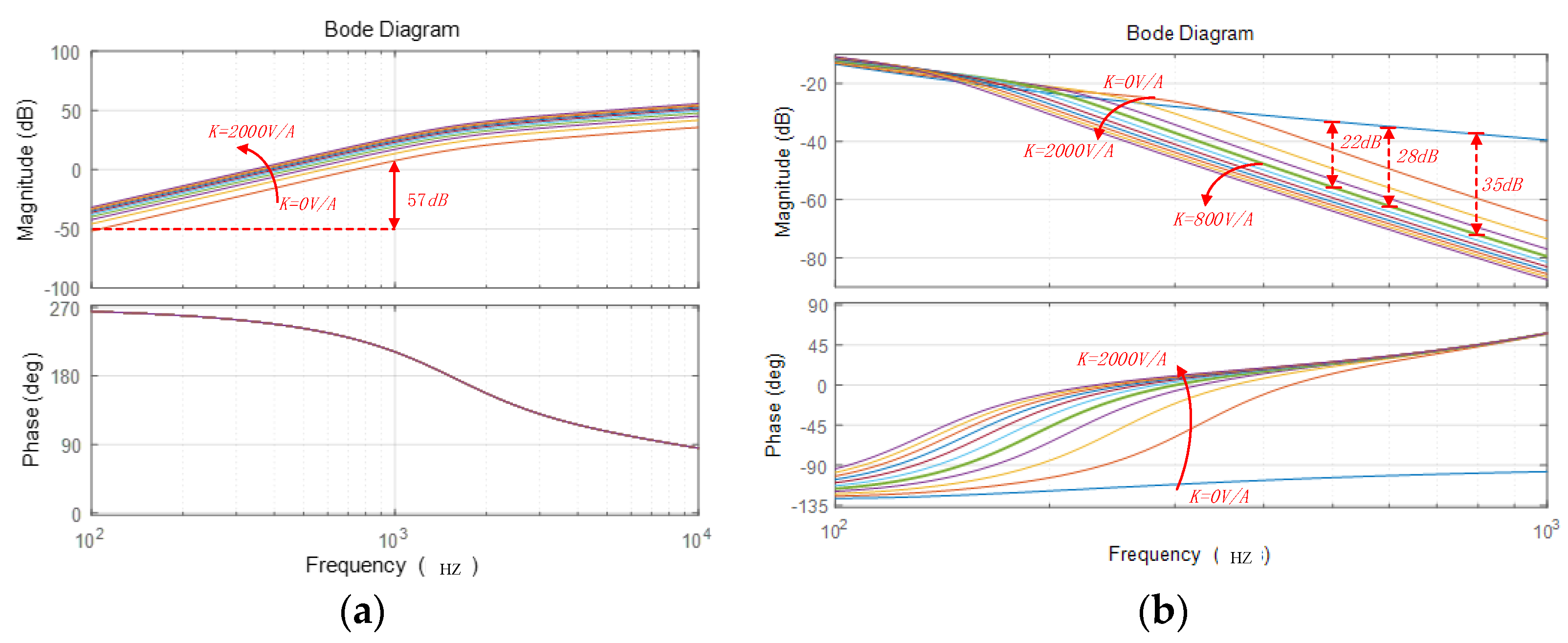
- The suppression strategy based on incomplete differential feedback can work on a harmonic range, so that the harmonic frequency detection can be avoided and inter-harmonic current can also be suppressed.
- The incomplete differential feedback and instantaneous frequency feed-forward methods were applied in a droop control; control parameters can be designed by considering the harmonic current suppression frequency range. This method is flexible and convenient to apply to future inverter custom modifications.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Symbols |
|---|---|
| Voltage of DC side | Udc |
| Reference voltage | Vref |
| Grid voltage | ug (Vg as RMS) |
| Output voltage of inverter | vabc (Vabc as RMS) |
| Output current of inverter | i2abc |
| Conductance and capacity of filter | L1, L2, Cf |
| sampling coefficient | H1, H2 |
| Instantaneous active power, reactive power | P, Q |
| Reference active power, reactive power | Pref, Qref |
| Grid equivalent impedance | Lg = Rg + jXg |
References
- Deng, Y.; Tao, Y.; Chen, G.; Li, G.; He, X. Enhanced Power Flow Control for Grid-Connected Droop-Controlled Inverters With Improved Stability. IEEE Trans. Ind. Electron. 2016, 64, 5919–5929. [Google Scholar] [CrossRef]
- Wu, X.; Li, X.; Yuan, X.; Geng, Y. Grid Harmonics Suppression Scheme for LCL-Type Grid-Connected Inverters Based on Output Admittance Revision. IEEE Trans. Sustain. Energy 2015, 6, 411–421. [Google Scholar] [CrossRef]
- Yao, W.; Chen, M.; Matas, J.; Guerrero, J.; Qian, Z.-M. Design and Analysis of the Droop Control Method for Parallel Inverters Considering the Impact of the Complex Impedance on the Power Sharing. IEEE Trans. Ind. Electron. 2011, 58, 576–588. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of Dynamic Characteristics Between Virtual Synchronous Generator and Droop Control in Inverter-Based Distributed Generators. IEEE Trans. Power Electron. 2016, 31, 3600–3611. [Google Scholar] [CrossRef]
- Silwal, S.; Taghizadeh, S.; Karimi-Ghartemani, M.; Hossain, M.J.; Davari, M. An Enhanced Control System for Single-Phase Inverters Interfaced With Weak and Distorted Grids. IEEE Trans. Power Electron. 2019, 34, 12538–12551. [Google Scholar] [CrossRef]
- Zhang, H.; Ruan, X.; Lin, Z.; Wu, L.; Ding, Y.; Guo, Y. Capacitor Voltage Full Feedback Scheme for LCL-Type Grid-Connected Inverter to Suppress Current Distortion Due to Grid Voltage Harmonics. IEEE Trans. Power Electron. 2021, 36, 2996–3006. [Google Scholar] [CrossRef]
- Liu, Q.; Li, Y.; Hu, S.; Luo, L. A Transformer Integrated Filtering System for Power Quality Improvement of Industrial DC Supply System. IEEE Trans. Ind. Electron. 2019, 67, 3329–3339. [Google Scholar] [CrossRef]
- Liu, Q.; Li, Y.; Luo, L.F.; Peng, Y.; Cao, Y. Power Quality Management of PV Power Plant With Transformer Integrated Filtering Method. IEEE Trans. Power Deliv. 2018, 34, 941–949. [Google Scholar] [CrossRef]
- Alishah, R.S.; Bertilsson, K.; Blaabjerg, F.; Sathik, M.A.J.; Rezaee, A.Y. New Grid-Connected Multilevel Boost Converter Topology With Inherent Capacitors Voltage Balancing Using Model Predictive Controller. In Proceedings of the 2020 22nd European Conference on Power Electronics and Applications (EPE’20 ECCE Europe) IEEE, Lyon, France, 7–11 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Qi, Y.; Lin, P.; Wang, Y.; Tang, Y. Two-Dimensional Impedance-Shaping Control With Enhanced Harmonic Power Sharing for Inverter-Based Microgrids. IEEE Trans. Power Electron. 2019, 34, 11407–11418. [Google Scholar] [CrossRef]
- Ravindran, V.; Ronnberg, S.K.; Bollen, M. Interharmonics in PV Systems: A Review of Analysis and Estimation Methods; Considerations for Selection of an Apt method. Renew. Power Gener. IET 2019, 13, 2023–2032. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, H.; Shi, F.; Sun, Y.; Terzija, V. A Robust and Adaptive Detection Scheme for Interharmonics in Active Distribution Network. IEEE Trans. Power Deliv. 2018, 33, 2524–2534. [Google Scholar] [CrossRef]
- Pang, B.; Nian, H.; Wu, C.; Cheng, P. Stator Harmonic Current Suppression for DFIG System Considering Integer Harmonics and Inter-harmonics. IEEE Trans. Ind. Electron. 2019, 66, 7001–7011. [Google Scholar] [CrossRef]
- Feola, L.; Langella, R.; Papič, I.; Testa, A. Selective Interharmonic Compensation to Improve Statcom Performance for Light Flicker Mitigation. IEEE Trans. Power Deliv. 2018, 33, 2442–2451. [Google Scholar] [CrossRef]
- Cavazzana, F.; Mattavelli, P.; Corradin, M.; Toigo, I. On the Stability Analysis of Multiple Parallel Inverters Using the Impedance Multiplication Effect. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Institution of Engineering and Technology (IET), Glasgow, UK, 19–21 April 2016; p. 6. [Google Scholar] [CrossRef]
- Chen, J.; Shao, H.; Cheng, Y.; Wang, X.; Li, G.; Sun, C.; Jiang, Q.; Qin, J. Harmonic Circulation and DC Voltage Instability Mechanism of parallel-SVG System. IET Renew. Power Gener. 2020, 14, 793–802. [Google Scholar] [CrossRef]
- Dong, D.; Wen, B.; Boroyevich, D.; Mattavelli, P.; Xue, Y. Analysis of Phase-Locked Loop Low-Frequency Stability in Three-Phase Grid-Connected Power Converters Considering Impedance Interactions. IEEE Trans. Ind. Electron. 2015, 62, 310–321. [Google Scholar] [CrossRef]
- Thacker, T.; Boroyevich, D.; Burgos, R.; Wang, F. Phase-Locked Loop Noise Reduction via Phase Detector Implementation for Single-Phase Systems. IEEE Trans. Ind. Electron. 2011, 58, 2482–2490. [Google Scholar] [CrossRef]
- Golestan, S.; Monfared, M.; Freijedo, F.D. Design-Oriented Study of Advanced Synchronous Reference Frame Phase-Locked Loops. IEEE Trans. Power Electron. 2012, 28, 765–778. [Google Scholar] [CrossRef]
- Feola, L.; Langella, R.; Testa, A. On the Effects of Unbalances, Harmonics and Interharmonics on PLL Systems. IEEE Trans. Instrum. Meas. 2013, 62, 2399–2409. [Google Scholar] [CrossRef]
- Ali, Z.; Christofides, N.; Hadjidemetriou, L.; Kyriakides, E. Design of an Advanced PLL for Accurate Phase Angle Extraction under Grid Voltage HIHs and DC Offset. IET Power Electron. 2018, 11, 995–1008. [Google Scholar] [CrossRef]
- Yang, L.; Chen, Y.; Luo, A.; Chen, Z.; Zhou, L.; Zhou, X.; Wu, W.; Tan, W.; Guerrero, J.M. Effect of Phase Locked Loop on Small-Signal Perturbation Modeling and Stability Analysis for Three-Phase LCL-Type Inverter Connected to Weak Grid. IET Renew. Power Gener. 2018, 13, 86–93. [Google Scholar] [CrossRef]
- Davari, M.; Mohamed, Y.A.I. Robust Vector Control of a Very Weak-Grid-Connected Voltage-Source Converter Considering the Phase-Locked Loop Dynamics. IEEE Trans. Power Electron. 2017, 32, 977–994. [Google Scholar] [CrossRef]
- Xu, J.; Qian, Q.; Zhang, B.; Xie, S. Harmonics and Stability Analysis of Single-Phase Grid-Connected Inverters in Distributed Power Generation Systems Considering Phase-Locked Loop Impact. IEEE Trans. Sustain. Energy 2019, 10, 1470–1480. [Google Scholar] [CrossRef]
- Zhou, J.Z.; Ding, H.; Fan, S.; Zhang, Y.; Gole, A.M. Impact of Short-Circuit Ratio and Phase-Locked-Loop Parameters on the Small-Signal Behavior of a VSC-HVDC Converter. IEEE Trans. Power Deliv. 2014, 29, 2287–2296. [Google Scholar] [CrossRef]
- Zhao, M.; Yuan, X.; Hu, J.; Yan, Y. Voltage Dynamics of Current Control Time-Scale in a VSC-Connected Weak Grid. IEEE Trans. Power Syst. 2016, 31, 2925–2937. [Google Scholar] [CrossRef]
- Harnefors, L. Analysis of Sub Synchronous Torsional Interaction With Power Electronic Converters. IEEE Trans. Power Syst. 2007, 22, 305–313. [Google Scholar] [CrossRef]
- Cheng, P.; Nian, H.; Wu, C.; Zhu, Z.Q. Direct Stator Current Vector Control Strategy of DFIG Without Phase-Locked Loop During Network Unbalance. IEEE Trans. Power Electron. 2016, 32, 284–297. [Google Scholar] [CrossRef]














| Parameter | Values |
|---|---|
| Rated power, frequency | 10 kW, 50 Hz |
| Inductance and capacitance of LC filter | L = 1.1 mH, C = 49 μF |
| Switching frequency | fc = 10 kHz |
| Controller sampling time | TC = 10−4 s |
| DC-link voltage | Vdc* = 600 V |
| Grid nominal voltage (RMS) | Vg = 400 V |
| Transformer ratio | n = 1:2 |
| Grid equivalent impedance | R = 2 mΩ |
| Voltage inner loop coefficient | KP = 0.1, Ki = 200 |
| Droop control coefficient | kP = 3 × 10−3, kQ = 2 × 10−4 |
| incomplete differential controller (GD) | k = 800, ξ = 0.707, ωn = 500 × π |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Wang, B.; Liu, J.; Li, D. An Improved Droop Control Strategy for Grid-Connected Inverter Applied in Grid Voltage Inter-Harmonics and Fundamental Frequency Fluctuation. Electronics 2021, 10, 1827. https://doi.org/10.3390/electronics10151827
Xu W, Wang B, Liu J, Li D. An Improved Droop Control Strategy for Grid-Connected Inverter Applied in Grid Voltage Inter-Harmonics and Fundamental Frequency Fluctuation. Electronics. 2021; 10(15):1827. https://doi.org/10.3390/electronics10151827
Chicago/Turabian StyleXu, Wanwan, Bin Wang, Jiang Liu, and Da Li. 2021. "An Improved Droop Control Strategy for Grid-Connected Inverter Applied in Grid Voltage Inter-Harmonics and Fundamental Frequency Fluctuation" Electronics 10, no. 15: 1827. https://doi.org/10.3390/electronics10151827