
Sliding Isolation Systems: Historical Review, Modeling Techniques, and the Contemporary Trends

Department of Civil Engineering, Manipal Institute of Technology, Manipal Academy of Higher Education, Manipal 576104, India
*
Author to whom correspondence should be addressed.
Buildings 2022, 12(11), 1997; https://doi.org/10.3390/buildings12111997
Submission received: 7 October 2022
/
Revised: 28 October 2022
/
Accepted: 3 November 2022
/
Published: 16 November 2022
(This article belongs to the Special Issue Seismic Impact on Building Structures: Assessment, Design, and Strengthening)
Abstract
:Base isolation techniques have emerged as the most effective seismic damage mitigation strategies. Several types of aseismic devices for base isolation have been invented, studied, and used. Out of several isolation systems, sliding isolation systems are popular due to their operational simplicity and ease of manufacturing. This article discusses the historical development of passive sliding isolation systems, such as pure friction systems, friction pendulum systems, and isolators with other sliding surface geometries. Moreover, multiple surface isolation systems and their behavior as well as the effectiveness of using complementary devices with standalone passive isolation devices are examined. Furthermore, the article explored the various modeling techniques adopted for base-isolated single and multi-degree freedom building structures. Special attention has been given to the techniques available for modeling the complex phenomena of sliding and non-sliding phases of sliding bearings. The discussion is further extended to the development in the contemporary areas of seismic isolation, such as active and hybrid isolation systems. Although a significant amount of research is carried out in the area of active and hybrid isolation systems, the passive sliding isolation system still has not lost its appeal due to its ease of adaptability to the structures.
1. Introduction
Earthquakes are one of the most catastrophic natural events, often resulting in the loss of lives and structures. Humans have been trying to reduce the harmful effects of earthquakes on structures, such as buildings, bridges, and tanks. The main challenge faced in reducing the harmful effect of an earthquake is to arrive at a suitable method to dissipate or offset the vast amount of energy imparted to the structure during a seismic event. In this regard, researchers have been developing some mechanical appurtenances over the years. As a result, several mechanical devices, such as fluid viscous dampers [1], visco-elastic dampers [2], and yielding-type dampers [3], have been invented. Depending on their location and type of arrangement within the structure, these devices absorb seismic energy locally. Over the years, the research focus shifted to developing mechanical devices that can significantly reduce the transfer of seismic energy to the structure, which led to the invention of base isolation systems. In principle, a base isolation system must have very high stiffness in the vertical direction and low stiffness in the lateral direction. High vertical stiffness enables the transfer of gravity loads, whereas low lateral stiffness ensures that the structure behaves as a rigid unit for the lateral load. The main issue to be addressed in the earthquake-resistant design of structures is the resonance problem. During a seismic event, structures generally are prone to frequency amplification as their fundamental frequency typically lies in the range of earthquake frequencies. Base isolation systems minimize the resonance issue by significantly altering the fundamental frequency of the structure. The concept of base isolation is not new; historically, the earliest known patent on the base isolation technique can be traced back to 1870 [4]. In the patent application, Jules Touaillon of California proposed a seismic isolation system which uses a combination of spheres and spherical surfaces to achieve seismic isolation (Figure 1).
Furthermore, in the year 1909, a doctor named Calantarients of Great Britain proposed an isolation technique [5], wherein a talc or mica layer is used between the foundation and superstructure to safeguard the building against earthquakes. One of the earlier known examples of seismic isolation can be found in a multi-story building in Ljubljana, Slovenia. The building was built in 1933 by adhering to the seismic isolation philosophy. The building’s foundation is separated from the deep file foundation using 2.5 mm thick layers of metals and asphalt [6,7]. To date, several review articles on various base isolation systems are available [8,9,10,11,12,13,14,15]. In 1969, an elementary school in Skopje, Yugoslavia, was base-isolated with unreinforced rubber blocks [16]. Therefore, the base isolation project of the Pestalozzi school is one of the earliest known implementations of the base isolation technique in an actual structure. Since the rubber blocks were unreinforced, the isolators lacked sufficient vertical stiffness, resulting in some amount of horizontal acceleration converting into vertical acceleration. This acceleration produces an additional bouncing effect which is highly undesired. As a result, these blocks are not used for base isolation at the present time. However, the experiences with these rubber blocks have led to considerable research, and since then, researchers have developed several types of rubber bearings [11].
One of the simplest ways to achieve base isolation is to implement some sliding mechanism between the superstructure and substructure. In its simplest form, this type of isolation can use a sand layer between the superstructure and substructures [17]. Although this approach is simple and reasonably effective for small structures, it is not suitable for multi-story buildings. More recently, Azinović et al. [18] proposed the use of thermal insulation boards installed beneath the foundations of a contemporary energy-efficient building to allow for controlled lateral sliding between the individual layers of the board. Out of the various scenarios considered by these researchers, the sliding prevention scenario was found to be the most cost-effective. To date, several varieties of sliding isolation systems have been developed. These systems are discussed in detail in the subsequent sections. Although the idea of seismic isolation is more than a century old, research and wide practical implementation started about 40 years ago. Since its inception, the concept of base isolation has significantly matured, and various base isolators have been developed, patented, and implemented.
Modern isolation systems can be broadly classified into elastomer base isolators, rolling-type isolators, and sliding isolators. Elastomer isolators use rubber as the base material, which may have metal insertions to increase the vertical stiffness. The details regarding elastomer isolators and their applications to the structures can be found in [19]. The rolling-type isolators use balls or rolling rods which can roll on concave surfaces. During an earthquake event, the energy is dissipated through rolling friction. Several research articles on various rolling-type isolations are available [20,21,22,23]. A detailed review of these isolators is also available [24]. The sliding isolators have two or more contact surfaces and work by mutual sliding of one or multiple surfaces. Although many review articles on various base isolation systems are available, the authors found only a few review articles on sliding isolators. Moreover, review articles discussing the various modeling techniques are still rare. Furthermore, review articles addressing the use of complementary devices along with sliding isolators are limited. In this context, the present review paper mainly focuses on sliding isolation systems, with special attention given to various modeling techniques for isolated structures and the complementary devices used with the sliding isolators.
2. Sliding Isolation Systems—History of Various Types
In this section, the historical development of sliding isolators based on the number of sliding surfaces is discussed. Several important studies and key findings of these studies are also briefly examined.
2.1. Sliding Isolation Systems with a Single Sliding Surface
In Bihar (India), during the 1934 earthquakes, many buildings survived as they developed cracks running longitudinally below the superstructure. These cracks permitted the sliding of the superstructure over the foundation, preventing damage to the superstructure [25]. This observation became the topic of interest, and researchers proposed sliding-type joints [26,27,28,29]. Few authors proposed a pure friction type (P-F) joint, where materials, such as graphite powder, sand or engine oil, are used between the superstructure and substructure to achieve the required coefficient of friction [25,26]. These structures significantly reduced the spectral acceleration when subjected to dynamic loading, indicating the effectiveness of P-F base isolation. Since these studies were restricted to simple one-story buildings, Nikolić-Brzev studied [30] a multiple-level P-F isolation scheme for multi-story buildings. The system was found to be effective in reducing the dynamic response of the buildings when compared with fixed-base buildings. Several other detailed studies and modeling techniques are also available on P-F isolation systems [31,32,33,34,35]. The details of these modeling techniques are discussed in Section 7.
Due to the lack of restoring mechanism in a P-F system, the superstructure may permanently shift from its original position at the end of a seismic event. This residual shift may affect the functional use of the building. Therefore, researchers shifted their focus toward sliding systems with restoring capabilities. Zayas et al. [36] proposed a simple system known as the friction pendulum system (FPS). Details of a typical friction pendulum isolator are shown in Figure 2.
The isolator consists of an articulated slider, which moves on a stainless-steel spherical surface. The slider is coated with stainless steel and encased in the cavity of a spherical plate. The slider portion in contact with the spherical surface is coated with a composite material with low friction, usually Teflon. Teflon is the trade name of polytetrafluoroethylene (PTFE). During a seismic excitation, the slider moving on the spherical surface may lift the mass, and the gravitational force provides the necessary restoring force. The friction between the slider and surface provides the necessary damping. This type of isolator has been extensively studied, and the results of detailed experimental studies are available [37,38]. Jangid [39] developed a mathematical model for a multi-story building and a bridge isolated with FPS. The researcher found the existence of optimal friction values, which can significantly reduce sliding displacements and floor accelerations. More recently, researchers proposed a regression expression to obtain the optimal value for the coefficient of friction [40]. It was found that the optimal value is dependent on the intensities of earthquakes. Vibhute et al. [41] proposed a graphical approach to obtain the optimal friction value. This method was found to be intuitive and simpler than the optimization algorithms. The effect of local bending effects on the response of FPS isolated buildings under seismic loading was studied by Tsai [42]. Through the study, the researcher found that ignoring the local bending effect may be unrealistic and should be included in the formulation phase. A study on FPS-isolated structures indicates the importance of considering bi-directional earthquake excitations [43]. It was found that the sliding displacement increases between 20% and 38% in the bi-directional excitation case when compared with unidirectional excitation. Several researchers studied various FPS-isolated structures, such as buildings [44], bridges [45], liquid storage tanks [46], and nuclear power plants [47]. Typically for analysis purposes, FPS is modeled in 1D or 2D; although this is agreeable under normal loading, it is not realistic in extreme loads, which may include uplifting [48]. In this context, several researchers have studied the behavior of FPS under extreme tri-axial loading by considering 3D models [49,50]. It is a well-established fact that the response of a structure is different for a near-fault than for a far-field earthquake. Therefore, base-isolated structures may show large displacements for near-fault pulses [51]. The frequency of an FPS is a function of its sliding geometry alone. Since the curvature of FPS remains the same over the sliding surface, the isolation frequency is constant. As a result, a low-frequency earthquake might induce resonance in the structure resting on FPS. Therefore, Pranesh and Sinha [52] proposed a variable frequency pendulum isolator (VFPI) whose frequency varies along the geometrical surface. The surface considered for the isolator is derived based on the modified expression of an ellipse. Since the curvature changes along the surface, the period of the isolator varies throughout the sliding. As a result, the matching of isolator and earthquake frequency is avoided, effectively curbing the resonance issue. Furthermore, the isolator is found to be effective for high-intensity earthquakes. A similar isolator known as a variable curvature friction pendulum system (VCFPS) was proposed by Tsai [53]. Here, the concave surface of the isolator is derived by subtracting a function from the equation for the sliding surface of FPS. The author studied the effectiveness of VCFPS by considering a numerical model of a building subjected to various earthquakes. The study indicated that the isolator could significantly reduce the base shear even in a near-fault earthquake characterized by low frequency. Lu et al. [54] introduced an isolator with a spherical curvature at the central portion with linearly varying geometry beyond this central region. The isolator is called a conical friction pendulum isolator (CFPI). Due to the geometry, the isolator acts similar to FPS within some threshold, and thus isolation frequency remains constant. Beyond this threshold, the frequency of isolation varies linearly along the geometry owing to the linearly varying surface. A comparison of the FPS, CFPI, and VFPI is shown in Figure 3.
Herein, it was found that all the isolators performed well in a far-field earthquake. However, for near-fault earthquakes, VFPI and CFPI are found to be more effective than FPS. Except for FPS, all other isolation systems mentioned earlier have flatter sliding surfaces, resulting in large residual displacements. In an attempt to reduce this residual displacement, Lu et al. [55] developed a sliding isolator known as a polynomial friction pendulum isolator (PFPI). The surface geometry of this isolator is governed by a fifth-order polynomial. The response of PFPI in terms of displacements was significantly lower than FPS for near-fault earthquakes. Krishnamoorthy [56] proposed an isolator whose geometry, as well as the coefficient of friction, varies with isolator displacement, named variable radius friction pendulum system (VRFPS). The geometry of VRFPS varies exponentially along the sliding surface, whereas the coefficient of friction varies linearly along the surface. The isolator was effective for a wide range of earthquake frequencies and significantly reduced residual displacement. Malu and Murnal [57] considered VFPI varying the coefficient of friction along the geometry to reduce the harmful effects of near-fault earthquakes. Rather than linearly varying the coefficient of friction as in VRFPS, the authors varied the coefficient of friction only in two specific regions. Authors claimed that restricting the variation of friction coefficient only in two regions significantly reduces the difficulties involved in manufacturing these isolation bearings. Moreover, the isolator was effective in reducing both acceleration and displacement. Furthermore, Calvi et al. [58] proposed two more varieties of these isolation systems. One system uses a flat surface known as BowTie (BT), and the other with a curved surface similar to FPS is known as BowC (BC). In both cases, the coefficient of friction varies along the surface. Authors argued that this variable friction coefficient could be practically obtained by creating concentric bands of different materials. Due to the flat geometry, BT lacks the recentering ability, but this could be used as a cost-effective solution for temporary buildings. However, BC has a re-centering capability and thus can be used for more permanent structures. Although analytical studies on BC isolators showed promising results, the authors suggested additional experimental studies to check the practical feasibility of these isolators. The sliding isolation systems generally use costly materials to achieve a low coefficient of friction for the surface. In this regard, a low-cost alternative for typical isolation bearing was suggested by Brito et al. [59]. The isolation system uses typical construction materials, such as concrete and steel, and does not use any replaceable mechanical parts. The authors explored the possibility of combining both convex and concave surfaces for isolation purposes.
2.2. Sliding Isolation Systems with Multiple Sliding Surfaces
Although the earliest literature on isolators with multiple sliding surfaces dates back to the 19th century [4], a systematic study in this area started only in this century. The effectiveness of sliding isolator systems for a wide range of earthquake frequencies encouraged the researchers to focus on isolators with multiple sliding surfaces. Tsai et al. [60] proposed a multiple friction pendulum system (MFPS) with two concave sliding surfaces (Figure 4). Due to its unique design, this isolator can accommodate large sliding displacements. Furthermore, multiple frictional surfaces provide additional damping, thus offsetting the harmful accelerations.
Fenz and Constantinou [61] studied various parameters of double concave friction bearings by varying the coefficient of friction, radii of sliding surfaces, and the height of articulates and sliders. The authors proposed that with several of these variables, designers can arrive at upper and lower isolator surfaces, whose radii can be varied depending on the requirement. Further research in base isolation has led to the development of another multi-stage friction pendulum bearing known as a triple pendulum (TP) bearing [62]. The system makes use of three independent pendulum mechanisms and four concave surfaces, as shown in Figure 5.
TP bearings are capable of achieving different hysteresis properties when being displaced. This property of variable hysteresis enables the isolator to adapt to different earthquake frequencies. Detailed theoretical and experimental studies of these multi-stage frictional pendulum isolators were carried out by Fenz and Constantinou [63,64]. Since sliding displacements are distributed on all the sliding surfaces, the heat generated during the high-velocity movement is also minimized. Various modeling techniques of these isolators are also available in detail [65,66]. A detailed study has been conducted by Morgan and Mahin [67] to assess the reliability of TP bearings. This probability-based study indicated that TP bearings are effective in various seismic hazard levels. A detailed study of these isolators subjected to extreme forces conducted by Becker et al. [68] showed that the damages are generally limited to inner sliding surfaces. Most recently, Lee and Constantinou [69] developed a quintuple friction pendulum isolator (Figure 6).
The isolator has six spherical sliding surfaces, which provides designers with multiple options to achieve complex seismic isolation requirements. A detailed mathematical model and finite element technique to model this type of isolator are proposed by Keikha and Ghodrati [70] and Sodha et al. [71], respectively.
A comparison of the typical force (f)-displacement (d) behavior and stiffness at various regimes (k) for various sliding isolators discussed to date is shown in Figure 7.
As seen in these figures, with the evolution of sliding isolators from single surface pure friction form to quintuple form, plenty of control points are now available to the designers. Each form shows better force-displacement behavior and energy dissipating capabilities than the previous one. At present, with many variables to choose from, the designers can aim at achieving very complex requirements of modern high-rise buildings. Recently, a sliding isolator known as XY-FP is gaining popularity among researchers [72]. The construction details of the isolator can be seen in Figure 8.
The unique feature of this isolator is that it has two different sliding surfaces perpendicular to each other, which permits independent sliding. Due to the arrangement, the isolator can have uncoupled behavior in two directions. Furthermore, the isolator can be designed to have two separate isolation periods by providing different curvatures in each of the directions. This feature benefits designers who wish to address displacement demands in the principal directions. Moreover, due to the vertical connector, this isolator can prevent the uplift, which can be caused by unforeseen vertical accelerations due to earthquakes. Most of the isolators mentioned earlier in this section have curved surfaces which may lead to manufacturing difficulties. In this context, a sloped sliding-type bearing (SSB) has been proposed recently [73]. This isolator has two orthogonal railings similar to XY-FP bearing; however, in contrast to the curved surface, this isolator has two discontinuous slopes. Since the isolator does not have a fixed curvature, it can efficiently avoid the resonance issue. However, this isolator lacks a fillet between two sloping surfaces. As a result, the isolator is prone to impact effects during the transition from one slope to the other.
3. Parameters Affecting the Frictional Coefficient in Sliding Isolators
The contact pressure is one of the parameters which can significantly affect the coefficient of friction. Studies have shown that friction is dependent on the apparent area of bearing (Aa), shear strength (S0), and the normal load (W) [74]. Accordingly, some researchers proposed a modified equation [75]. The equation for the coefficient of friction considering the contact pressure effect is as follows:
µ = Aa S0/W
Experimental studies have shown that friction reduces with the increase in contact pressure [76,77,78]. A detailed mathematical model which incorporates the dependency of sliding velocity on bearing pressure was developed by some authors [78].
Sliding isolators generally use Teflon-steel interfaces, which support the weight of the superstructure. Studies have shown that the friction developed at the interfaces of Teflon-steel does not remain constant during sliding as in Coulomb friction but varies with the sliding velocity and contact pressure [79,80]. Researchers have found that friction increases with the sliding velocity up to a certain value (0.1 to 0.2 m/s) but remains constant beyond that [77]. Furthermore, these researchers found that this reduction is prominent in the case of high-velocity motions. It has been reported that ignoring the velocity-dependent friction model for sliding isolations would result in an unrealistic estimation of the forces [81]. The coefficient of sliding friction can be approximated by the equation given by Mokha et al. [82]:
where
µs = µmax − (µmax − µmin) exp (−aV)
- µmax = friction coefficient corresponding to large velocity.
- µmin = friction coefficient corresponding to low velocity.
- a = a constant varies between 20 and 100 s/m depending on the contact pressure and interface conditions.
- V = velocity of sliding motion.
Equation (2) represents a simplified form of a complex behavior but has been found to produce agreeable results, and thus even incorporated in the structural analysis software SAP2000 [83]. The dependence of friction on the velocity of motion implies that the coefficient of sliding friction is directly related to the characteristics of earthquakes. Therefore, the velocity aspect needs to be carefully addressed, especially when analyzing structures subjected to high-frequency earthquakes.
Another parameter which significantly influences the friction coefficient is the heat generated during the sliding movement of the isolation components. Several authors have reported that at high velocities, the friction coefficient slightly reduces [75,84,85]. This reduction has been attributed mainly to the melting of the bearing material at elevated temperatures generated during high-velocity motion [86]. Through experimentation, researchers found that the decay in friction could be significant; for non-lubricated surfaces, this could be as high as 25% and 30% [87]. Although the reduction in friction coefficient may reduce the base shear, this may warrant undesired large displacements. Some researchers have proposed 3D models of FPS bearings capable of simulating heat flux generated depending on the sliding velocity and contact pressure [49,88]. Design tools for the estimation of temperature-characteristics are also available [89]. Recently, De Dominico et al. [90] have conducted detailed experimentation to assess the effect of temperature on the friction coefficient of a double-curved sliding isolator. This experimental regime included the use of several thermocouples to sense the temperature variation within the sliding surface. It was found that lower sliding velocities associated with a temperature rise up to 45 °C had an insignificant effect on friction.
To date, the discussion on friction variation has been dealt with by considering velocity and temperature separately in this section. However, velocity, contact pressure, and temperature are all interdependent in the actual scenario. In this context, the authors Kumar et al. [91] proposed a unified model that can account for the various parameters mentioned earlier. The study indicated that temperature has the highest effect on the isolator displacement out of various parameters. Additional parameters which affect the isolation performance are surface roughness, corrosion, contamination, lubrication, and wear, etc. The effect of these parameters is discussed in detail in the technical report [86].
4. Parameters for the Design of Sliding Isolators
Some essential design parameters related to the sliding isolators are discussed in this section. Although the discussion is mainly related to curved surface isolators, except for the sliding curvature details, other parameters are also applicable to flat surface isolators. The usage of sliding isolators in real-life structures is governed by several factors, such as the type of material and thickness required for the sliding surface, the thickness of the steel plate, the dynamic coefficient of friction, and the radius of the sliding surface in case of curved surfaces, etc. Although sliding isolators mostly use a Teflon-steel interface, some researchers have also considered polyamide (PA) and polyethylene (PE) for the sliding surface [92]. The nominal coefficient of friction can be chosen based on Equation (2). The typical specification for a FPS is given in Table 1.
Interested readers can refer to detailed design examples of sliding isolators for the bridges in [93,95]. The design parameters are to be chosen carefully based on the standard code of practices relevant to the country. To date, several countries have released standard codes of practice related to base isolation, such as American codes [96,97], European codes [98,99], and Japanese codes [100]. Recently, a draft version of the New Zealand code has also been released [101]. The behavior of the sliding isolators is also affected by several other aspects, such as ageing, contamination, cumulative movement, and temperature. To account for these aspects, upper and lower bound values of modification factors must also be incorporated into the design. Detailed discussions of these factors can be found in [75].
5. Behavior of Sliding Isolators under Extreme Loading
Sliding isolators have been proven to be very effective against earthquake excitations over the years. However, due to their non-adaptive characteristics, they may demonstrate undesirable behavior when subjected to certain excitations. If the sliding isolator is subjected to large unwarranted displacement, the slider can move beyond the edge and may even eject out of the housing unit. This issue can be addressed using a retainer ring around the sliding surfaces. However, this may lead to reduced displacement. Moreover, the slider may collide with the rim, damaging the bearing. This aspect should be taken into account during the design process. A sliding isolator may experience uplifting when the lifting forces overcome the compression on the bearing due to the structure. Depending on the amount of decoupling of the isolator components, the effect of uplifting can range from mild to catastrophic. Sarlis and Constantinou [102] have provided detailed modeling techniques for TP bearings, including the uplift phenomenon. This model is further used in a study conducted on double pendulum friction bearing subjected to pulse-type motion [103]. Results indicated that under large masses, the retainer failure is more significant than the uplift failure. Moreover, the study showed that providing a large radius of curvature was detrimental to the isolator. Furthermore, it was found that a short-period pulse results in failure due to impact. Recently, some researchers studied the effect of the hardening stage in a TP bearing subjected to extreme loading [68]. The hardening stage significantly reduced the force of impact within the isolator but had a negligible effect on the force transfer to the superstructure. The possible uplift issues can be avoided using uplift restrainers [104,105,106]. The restrainers are usually not integral to isolators and may need additional space and separate maintenance. In this regard, a more practical isolation system with uplift restraint known as XP-FP isolation bearing has been invented [72]. This bearing works similar to FPS under horizontal loading but restrains uplift when subjected to vertical excitations [107].
6. Sliding Isolators with Complementary Devices
The sliding isolators have some limitations when used as standalone devices. In the case of pure friction devices, these limitations include large sliding displacements and significant residual displacements. Furthermore, although friction pendulum isolators effectively control residual displacements, they may be subjected to large sliding displacements in a low-frequency earthquake. Some researchers tried to address these issues by combining sliding and rubber isolators [108,109,110] Constantinou et al. [111] proposed a sliding isolation system which uses steel springs at the base. The energy dissipation in this type of system is provided by the friction generated between the sliding interfaces, and the restoring capability is provided by the springs. A similar concept has been explored by several researchers [112,113]. The sliding isolators with pendulum mechanisms are quite effective in controlling residual displacements. Although these isolators produce less displacement when compared with P-F isolators, the magnitude of this displacement is deemed to be quite large. Therefore, Tsopelas et al. [114] considered a sliding isolator with additional energy dissipation devices known as fluid dampers for bridges. This system reduced the sliding displacement and was effective for a wide frequency range of seismic excitation. Since energy dissipation by the isolator plays a major role in reducing the harmful seismic effects, Makris and Chang [115] discussed various energy dissipation models in their study. The study indicates that, with a suitable viscous energy dissipation mechanism, it is possible to reduce large displacements without a further increase in base shear and accelerations. Chang et al. [116] carried out studies by considering viscous and friction damping in base-isolated structures. A friction pendulum bearing has been considered for the study with additional fluid dampers. The fluid dampers provide viscous damping, and the sliders provide friction damping. Experimental results indicated that viscous damping is most effective in moderately low frequencies, whereas friction damping is effective in low-frequency excitations. Soneji and Jangid [117] studied the effectiveness of a combination of base isolation and viscous fluid dampers (VFD) for flexible bridges. Due to its construction, a VFD produces the reaction out of phase with the forces on the structure. Therefore, this hybrid system effectively reduced the sliding displacement without appreciably increasing the base shear. Furthermore, the authors found an optimal viscous damping value for which the base isolation is most effective. The researcher Providakis [118] extended this study to seek the effectiveness of this hybrid base isolation system on multi-story buildings. The author studied the effect of the VFD damping coefficient on the response of the building subjected to earthquakes. The study indicated that an optimal value for the damping coefficient exists and any higher value than this has a detrimental effect on inter-story drifts and floor accelerations. As indicated by the researchers, the base isolation system scheme, which uses FPS and VFDs, is quite effective in controlling the structural response. However, the system cannot adapt to various earthquake frequencies due to a well-known issue of FPS, which may show resonant behavior in near-fault excitations. Krishnamoorthy [119,120] proposed a passive combination of VFD with VRFPS for the seismic isolation. Due to the exponential sliding geometry of the VRFPS, the system avoids the resonance issue. Moreover, in general, the sliding displacement of a VRFPS is slightly more than FPS, but the usage of VFD reduces this significantly. With this combination, the researcher was able to avoid the resonant response of the structure as well as control the sliding displacement. The previous researchers mainly used linear viscous dampers in their study; however, studies on the effect of non-linear dampers are limited. Wolff et al. [121] studied the effect of a non-linear viscous damper on the friction pendulum isolated structure. The authors concluded that linear VFDs are more beneficial than non-linear VFDs for reducing sliding displacements. Some studies conducted by authors Zhou and Chen [122] indicated that the dampers used in conjunction with isolators are more effective in strong seismic events than small magnitude earthquakes. Additional detailed modeling techniques for these base isolation systems are discussed by some researchers [123].
7. Modeling Techniques of Base-Isolated Building Structures
Modeling a base-isolated structure is rather difficult than conventional structures as it involves modeling a sliding joint. The process of obtaining a solution for governing equations is fairly complex due to the discontinuity between the foundation and the structure. One of the earliest known models capable of modeling base isolation is a coulomb friction model proposed by Hartog [124]. The author provided a solution for a single-degree of freedom system (SDOF) (Figure 9) subjected to excitation from an external source.
An improved two-degree of freedom model with the coulomb friction and viscous damping subjected to harmonic excitation was also proposed [125]. A similar modeling technique was later used to study a masonry building resting on a sliding joint [25,26]. The researchers proposed a mathematical model to represent the sliding friction effect and further verified it by conducting tests on experimental models of masonry buildings. The mathematical model is a two-degree freedom (two-DOF) model consisting of a top (m1) and base mass (m2), as shown in Figure 10.
An isolated structure on a sliding joint passes through sliding and non-sliding phases in a short time, and mathematically modeling these phases is quite a challenge. Some authors modeled a basic two-DOF oscillator system subjected to harmonic excitation and provided solutions by considering sliding and non-sliding phases [28,29]. Modeling of sliding and static phases is more complex for seismic excitations than harmonic excitations as these phases alter within a short time. To deal with this complex problem, Mostaghel and Tanbakuchi [31] proposed a mathematical model where they developed the conditions for the beginning and end of the sliding phases. The authors used the end condition of a sliding phase as the initial condition for the next phase. Although the entire system is non-linear, it acts linearly during the sliding and non-sliding phases, enabling the authors to provide solutions to the non-linear system using linear equations. The approaches mentioned to date apply to small structures (only two-DOF) and would be computationally intensive if modified to suit larger structures. One of the earlier attempts to address these limitations is made by Yang et al. [32]. Earlier researchers made use of two-DOF with base mass at the plinth level; however, the authors here considered masses of stories at floor levels. The authors proposed a multi-degree freedom system (MDOF) with a fictitious spring (K) at the base, as shown in Figure 11a. In the non-sliding phase, the fictitious spring’s stiffness is very high, whereas, in the sliding phase, the stiffness considered is zero (Figure 11b).
Due to this unique technique, the solution for the sliding structure can utilize numerical methods, which are well-suited for computers. Although this method is simple, a very small velocity is expected in the non-sliding phase, which can produce errors in the solution. Vafai et al. [33] proposed a modified method using a rigid link, as shown in Figure 12a, to overcome this issue. This link assumes a value of zero stiffness during the sliding phase and infinity during the non-sliding phase (Figure 12b). Therefore, this method solves the issue of unpredicted oscillations during the transition phase from sliding to non-sliding. The method is computationally efficient and requires less time for the solutions.
In all these models, researchers considered only a horizontal degree of freedom at each story level, and this idealization may affect the reliability of the models proposed. Therefore, Krishnamoorthy and Saumil [34] proposed an MDOF structure resting on a P-F sliding surface considering all six degrees of freedom. The authors used the fictitious spring model proposed by Yang et al. [32] to simulate the sliding and non-sliding phases. Most of the approaches are based on relative displacements of the masses. Moreover, Krishnamoorthy [35] proposed a model based on the absolute displacement approach. This approach reduces the computational effort significantly as the matrices related to the stiffness and damping do not change when the structure undergoes sliding and non-sliding phases. Furthermore, the author studied the effects of providing a restoring mechanism on the structure’s response.
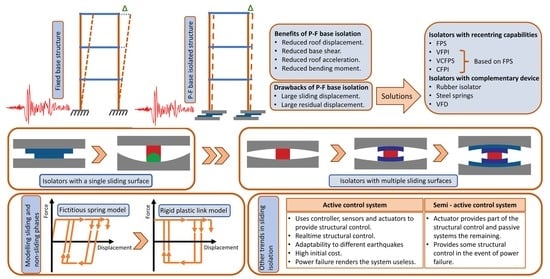
8. Other Trends in Sliding Isolation Systems
The standalone sliding devices or devices connected with supplemental viscous dampers are passive, i.e., they cannot adapt and change their behavior depending on the input frequency. The general issues with passive systems are: (i) Lack of adaptability—PF and FPS isolators work only for a limited type of earthquake frequency, (ii) large isolator displacements—common in PF and pendulum isolators with flatter surfaces, (iii) residual displacement—common with most of the sliding isolators, except for FPS. Furthermore, the occurrence of high magnitude earthquakes is rare, due to which isolators might not activate for a long time. Therefore, the coefficient of friction is likely to vary and may not achieve the desired level of isolation. Moreover, passive isolators need a certain threshold frequency to activate, i.e., for minor vibrations, the isolator might not come into effect at all, which could be detrimental to sensitive instruments within the structure. Therefore, to achieve the required degree of structural control, researchers started focusing on methods to instantly control the behavior of structures depending on the response of a structure subjected to an earthquake [126,127,128,129]. This active control system consists of controllers, sensors, and actuators to achieve the required level of seismic control. The development of these active control systems gained momentum with the advancement in computer technology, and many buildings in Japan incorporated this system [130]. To date, several review literatures are available on active control systems [131,132]. Although an active control system can adapt and control the response in real-time, researchers have observed several issues in the real-world implementation of the system, such as substantial initial and maintenance costs and demand for vast amounts of electricity. Moreover, the controller design is very complex, and the system requires large actuators to cope with seismic forces [133]. Furthermore, active systems need large electric power, which may not be available during an earthquake, rendering the entire system useless.
Given these major drawbacks, researchers have developed semi-active systems. In this system, actuators provide one part of the control, and passive systems provide the remaining part. As a result, the electricity demands reduce considerably and in case of a total power failure, the passive system can still provide a reasonable amount of control. A semi-active system typically consists of passive devices, such as P-F isolator, FPS, and rubber bearings used in conjunction with controllable devices, such as variable friction, variable stiffness, and variable damping devices. Several researchers developed systems capable of varying the friction coefficient of isolators depending on earthquake intensity [134,135]. The friction coefficient varied by adjusting fluid pressure in a chamber within the isolator. In an earthquake event, the computer senses the structure’s response and sends appropriate signals to the control valve of the fluid intake chamber. Nagarajiah et al. [136] proposed a semi-active system comprising a passive sliding isolator and an active hydraulic actuator with a parallel re-centering spring. The researcher developed a control algorithm to give instant feedback to the actuator to control the high-frequency region. Therefore, the system can control the acceleration and sliding displacement better than a passive sliding isolator. For a lower magnitude earthquake, the controller reduces the friction coefficient, which helps the isolator system to activate even for minor vibrations. During a large earthquake, the coefficient of friction of the isolator increases, effectively mitigating the effect of major vibrations. The effectiveness of a semi-active system of sliding isolators with actuators for a bridge was studied by Yang et al. [137]. The study showed that the system could control the large sliding displacement. This study was further extended to multi-story building models [138] to indicate the robustness of the control technique. Dyke et al. [139] studied the effectiveness of using magneto-rheological (MR) dampers (Figure 13) in structural control.
The damping coefficient of these dampers can be controlled instantly by passing an electric current through the MR liquid, which is contained inside the damper. Due to the availability of this control over the damping coefficient, these dampers can be effective for a wide range of excitations. Details of these dampers and the effectiveness of these dampers in controlling the behavior of the structure are available in [140,141]. Some researchers have further studied the effectiveness of using a combination of MR dampers with sliding isolation systems in reducing the earthquake response of bridges [142,143] and buildings [144].
Wongprasert and Symans [145] proposed an isolation system consisting of passive FPS and rubber bearing in conjunction with adaptable fluid dampers. The authors developed a control algorithm based on fuzzy logic for varying the fluid pressure within these dampers, which can alter the damping properties of the system depending on the excitation. A similar system, which is a combination of a curved surface isolator and a controllable fluid damper, was studied by Krishnamoorthy et al. [146]. The authors used a neural network algorithm based on a radial basis function for the dynamic control of the system. Moreover, researchers have developed devices whose stiffness can vary continuously during an earthquake to reduce the large displacements induced in bridges due to near-fault earthquakes. This system, when used along with passive sliding isolators, was found to be effective in reducing the displacement without imparting additional forces to the structure [147]. More recently, some researchers developed an FPS which can be tuned suitably depending on the type of excitation [148,149,150]. These isolators can change their friction coefficient depending on the seismic inputs. A fluid chamber within the isolator controls this variation of friction. Tunable FPS are found to be very effective in a variety of earthquake excitations due to their adaptability.
9. Challenges in the Worldwide Implementation of Isolation Schemes
Although base isolation techniques have become mature enough to be used in real-life structures, they are still not used in many countries. Especially in developing countries, such as India, the application of these technologies is difficult to achieve. To date, one hospital building in Bhuj, Gujrat, India, has been retrofitted with rubber bearings [151]. This reluctance could be mainly attributed to the perceived higher cost of these technologies [101]. Furthermore, the lack of understanding of the long-term benefits of isolation and complicated design code documents are other aspects which affect the implementation of isolation techniques [152]. Several researchers have shown that choosing an appropriate isolation system can reduce the life-cycle cost by 20% when compared with a rigid base structure [153,154]. When considering life-cycle costs, the major focus is on reducing the damage and downtime costs. It has been found that even for minor earthquakes providing seismic isolation could be economically viable [155]. Some researchers have shown that although the direct construction cost of the base-isolated structure is high, the post-earthquake loss cost would be about 82% to 84% lower compared with a fixed base structure [156]. Mayes et al. [157] suggested that the initial cost of the base isolation scheme mainly depends on the design forces prescribed by the codes and the location of the isolators (floor level and top of basement level). More conservative codes lead to higher force estimation and increase the cost. Furthermore, if the isolators are planned at the floor level, it may lead to higher costs due to the requirement of additional structural slabs. However, even with the high initial costs, cost savings can be achieved due to savings in non-structural component bracing. Moreover, these researchers pointed out that for the actual cost comparison, it is necessary to assess the conventional and isolated structures under the same performance criteria. In one example, where both the conventional and isolated structures are evaluated under the same performance level, the isolation cost was reduced by 6% [158]. A recent study by Egbelakin et al. [158] identified the hurdles in implementing base isolation strategies. Although the researchers discussed the context of the implementation scenario in New Zealand, most of the addressed issues are common in many developing countries. The researchers pointed out that the lack of awareness and market availability are the key reasons behind the reluctance to adopt base isolation schemes. Furthermore, the researchers suggest that the incorporation of base isolation schemes in the code of practice is the key to global acceptance of these technologies. To date, the discussion in this section has been on isolation systems in general rather than on specific isolators. A study conducted by Clemente and Buffarini [159] on buildings isolated with elastomer and sliding isolators shows a negligible cost difference between conventional and base-isolated buildings. Moreover, these researchers found that the base isolation scheme is less expensive than conventional buildings when the design is for higher seismic forces. Furthermore, a recent study on the life-cycle cost of FPS isolated structure indicates that the life-cycle cost of isolation is inversely proportional to the degree of isolation required [160]. These studies have indicated that the real-life cost of base isolation is not higher than the conventional buildings; therefore, competent code authorities and governments should address any reluctance to use these technologies.
10. Conclusions
This paper discusses the development in the field of base isolation in general and from a historical perspective. The focus has been on the development of sliding isolation systems. Various types of friction isolator systems based on their geometry have been discussed. Furthermore, various modeling techniques of sliding base-isolated structures have been reviewed. The various other developments in the area of active and semi-active isolation systems have been reviewed, as well. The following conclusions may be summarized based on the previous discussions:
- (1)
- Base isolation is one of the oldest techniques and has been proven effective over the centuries. However, this technique is still not widely practiced in many parts of the world [151].
- (2)
- Sliding isolation systems are being researched exhaustively due to their simplicity and cost-effectiveness. In fact, the cost of a curved surface isolator is lower than high-damping rubber bearings [161]. Although the sliding isolators are very effective in seismic isolation, some inherent issues, such as dependency of friction on velocity, heat, and contact pressure, need special attention during the design.
- (3)
- FP isolator is one of the simplest forms of isolator with a restoring capability. Although the isolator effectively controls the harmful effects of earthquakes, it is prone to pulse-like seismic excitation.
- (4)
- The resonance issue of the FP isolator lead the researchers to look for alternative isolator surfaces, which can provide the restoring capacity similar to the FP isolator and still avoid the resonance issue.
- (5)
- Various isolators, such as VFPI, VRFPS, CFPI, and VFPI have been developed, and detailed studies have proven that these isolators are capable of providing sufficient seismic isolation without inducing resonance.
- (6)
- Compared with FP isolators, these isolators have flatter geometry, which may lead to larger sliding displacement and higher residual displacements.
- (7)
- Several researchers have proposed multiple sliding surface isolators, such as double pendulum, triple pendulum, and quintuple bearings to accommodate large sliding displacement. Due to the multiple sliding surfaces, it is possible to achieve higher energy dissipation. Moreover, the hysteresis behavior of multiple surface isolators provides many control points for designers to achieve the desired isolation level.
- (8)
- Some researchers used supplemental systems, such as VFDs to control the large displacement of sliding isolation systems. These dampers are capable of reducing the sliding displacement without inducing higher forces on the structures. This unique feature of VFDs is attributed to its out-of-phase behavior during seismic excitations.
- (9)
- Modeling a sliding system is challenging as it involves obtaining the solutions for a structure which is disconnected at the base.
- (10)
- The solution technique for the isolated structure is further complicated due to sliding and non-sliding phases. Several researchers proposed different techniques to tackle this problem.
- (11)
- The standalone sliding isolators are incapable of adapting to various seismic excitations, which prompted researchers to propose active structural control systems.
- (12)
- Active control systems can respond to seismic excitations in real-time and thus are suitable for a wide range of frequencies. However, this system is very costly, and electricity demand is very high. Moreover, in the event of a major power failure, the entire system may be ineffective.
- (13)
- Several semi-active systems were proposed and tested to alleviate the drawbacks of an active system, such as a controllable friction system in conjunction with a sliding isolator and MR dampers with PF isolators. These devices considerably reduce the cost without compromising the adaptability to wide frequency ranges.
- (14)
- Although active and semi-active base isolation systems are quite effective in controlling the seismic behavior of the structure, due to their simplicity, the passive sliding isolation systems still appeal to the research community. Therefore, new varieties of sliding systems are still being developed and studied by researchers worldwide.
Author Contributions
Conceptualization, A.R.A., A.K. and K.K.; resources, M.C.; writing—original draft preparation, A.R.A.; writing—review and editing, A.R.A. and M.C.; visualization, A.R.A.; supervision, A.K. and K.K.; project administration, A.K. All authors have read and agreed to the published version of the manuscript.
Funding
The APC was funded by Manipal Academy of Higher Education, Manipal.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Symans, M.D.; Constantinou, M.C. Passive Fluid Viscous Damping Systems for Seismic Energy Dissipation. J. Earthq. Technol. 1998, 35, 185–206. [Google Scholar]
- Chang, K.C.; Soong, T.T.; Oh, S.-T.; Lai, M.L. Seismic Behavior of Steel Frame with Added Viscoelastic Dampers. J. Struct. Eng. 1995, 121, 1418–1426. [Google Scholar] [CrossRef]
- Skinner, R.I.; Kelly, J.M.; Heine, A.J. Hysteretic Dampers for Earthquake-Resistant Structures. Earthq. Eng. Struct. Dyn. 1974, 3, 287–296. [Google Scholar] [CrossRef]
- Touaillon, J. Improvement in Buildings. US Patent No. 99. 973, 1870. [Google Scholar]
- Calantarients, J.A. Improvements in and Connected with Building and Other Works and Appurtenances to Resist the Action of Earthquakes and the Like; Paper No. 325371; Stanford University: Stanford, CA, USA, 1909. [Google Scholar]
- Fajfar, P. Ljubljana skyscraper. Concern for earthquake safety in the thirties. Gradb. Vestn. 1995, 34, 119–122. (In Slovene) [Google Scholar]
- Bek, M.; Oseli, A.; Saprunov, I.; Zhumagulov, B.T.; Mian, S.M.; Gusev, B.V.; Žarnić, R.; von Bernstorff, B.; Holeček, N.; Emri, I. High Pressure Dissipative Granular Materials for Earthquake Protection of Houses. Anal. Pazu 2013, 3, 75–86. [Google Scholar] [CrossRef]
- Kelly, J.M. Aseismic Base Isolation: Review and Bibliography. Soil Dyn. Earthq. Eng. 1986, 5, 202–216. [Google Scholar] [CrossRef]
- Buckle, I.G.; Mayes, R.L. Seismic Isolation: History, Application, and Performance—A World View. Earthq. Spectra 1990, 6, 161–201. [Google Scholar] [CrossRef]
- Malu, G.; Pranesh, M. Sliding Isolation Systems: State-of-the-Art Review. IOSR J. Civ. Eng. 2013, 6, 30–35. [Google Scholar]
- Jangid, R.S.; Datta, T.K. Seismic Behaviour of Base-Isolated Buildings: A State-of-the-Art Review. Proc. Inst. Civ. Eng.-Struct. Build. 1995, 110, 186–203. [Google Scholar] [CrossRef]
- Warn, G.P.; Ryan, K.L. A Review of Seismic Isolation for Buildings: Historical Development and Research Needs. Buildings 2012, 2, 300–325. [Google Scholar] [CrossRef] [Green Version]
- Calvi, P.M.; Calvi, G.M. Historical Development of Friction-Based Seismic Isolation Systems. Soil Dyn. Earthq. Eng. 2018, 106, 14–30. [Google Scholar] [CrossRef]
- Ismail, M. Seismic Isolation of Structures. Part I: Concept, Review and a Recent Development. Hormig. Acero 2018, 69, 147–161. [Google Scholar] [CrossRef]
- De Luca, A.; Guidi, L.G. State of Art in the Worldwide Evolution of Base Isolation Design. Soil Dyn. Earthq. Eng. 2019, 125, 105722. [Google Scholar] [CrossRef]
- Kelly, J.M. Vertical Flexibility in Isolation Systems. Civ. Eng. Res. J. 2018, 4, 555629. [Google Scholar] [CrossRef] [Green Version]
- Li, L. Base Isolation Measure for Aseismic Buildings in China. In Proceedings of the 8th World Conference on Earthquake Engineering, San Francisco, CA, USA, 21–28 July 1984; Volume 6, pp. 791–798. [Google Scholar]
- Azinović, B.; Kilar, V.; Koren, D. Energy-Efficient Solution for the Foundation of Passive Houses in Earthquake-Prone Regions. Eng. Struct. 2016, 112, 133–145. [Google Scholar] [CrossRef]
- Kelly, J.M. Earthquake-Resistant Design with Rubber, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 1997; ISBN 978-1-4471-0971-6. [Google Scholar]
- Jangid, R.S. Stochastic Seismic Response of Structures Isolated by Rolling Rods. Eng. Struct. 2000, 22, 937–946. [Google Scholar] [CrossRef]
- Zhou, Q.; Lu, X.; Wang, Q.; Feng, D.; Yao, Q. Dynamic Analysis on Structures Base-Isolated by a Ball System with Restoring Property. Earthq. Eng. Struct. Dyn. 1998, 27, 773–791. [Google Scholar] [CrossRef]
- Yang, C.-Y.; Hsieh, C.-H.; Chung, L.-L.; Chen, H.-M.; Wu, L.-Y. Effectiveness of an Eccentric Rolling Isolation System with Friction Damping. J. Vib. Control 2012, 18, 2149–2163. [Google Scholar] [CrossRef]
- Rawat, A.; Matsagar, V. Seismic Analysis of Liquid Storage Tank Using Oblate Spheroid Base Isolation System Based on Rolling Friction. Int. J. Non-Linear Mech. 2022, 147, 104186. [Google Scholar] [CrossRef]
- Harvey, P.S.; Kelly, K.C. A Review of Rolling-Type Seismic Isolation: Historical Development and Future Directions. Eng. Struct. 2016, 125, 521–531. [Google Scholar] [CrossRef]
- Qamaruddin, M. Development of Brick Building Systems for Improved Earthquake Performance. Ph.D. Thesis, University of Roorkee, Roorkee, India, 1978. [Google Scholar]
- Arya, A.S.; Chandra, B.; Qamaruddin, M. A New Building System for Improved Earthquake Performance. In Proceedings of the Sixth Symposium on Earthquake Engineering, IIT Roorkee (Formerly, University of Roorkee), Roorkee, India, 5–7 October 1978; Volume 1, pp. 499–504. [Google Scholar]
- Arya, A.S.; Qamaruddin, M.; Chandra, B. New System of Brick Buildings for Improved Behaviour during Earthquakes. In Proceedings of the Seventh World Conference on Earthquake Engineering, Istanbul, Turkey, 8–13 September 1980; pp. 225–232. [Google Scholar]
- Mostaghel, N.; Hejazi, M.; Tanbakuchi, J. Response of Sliding Structures to Harmonic Support Motion. Earthq. Eng. Struct. Dyn. 1983, 11, 355–366. [Google Scholar] [CrossRef]
- Westermo, B.; Udwadia, F. Periodic Response of a Sliding Oscillator System to Harmonic Excitation. Earthq. Eng. Struct. Dyn. 1983, 11, 135–146. [Google Scholar] [CrossRef]
- Nikolić-Brzev, S. An Innovative Seismic Protection Scheme for Masonry Buildings. In Proceedings of the 10th International Conference on Brick/Block Masonry, Calgary, AB, Canada, 5–7 July 1994; pp. 273–282. [Google Scholar]
- Mostaghel, N.; Tanbakuchi, J. Response of Sliding Structures to Earthquake Support Motion. Earthq. Eng. Struct. Dyn. 1983, 11, 729–748. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Lee, T.-Y.; Tsai, I.-C. Response of Multi-Degree-of-Freedom Structures with Sliding Supports. Earthq. Eng. Struct. Dyn. 1990, 19, 739–752. [Google Scholar] [CrossRef]
- Vafai, A.; Hamidi, M.; Ahmadi, G. Numerical Modeling of MDOF Structures with Sliding Supports Using Rigid-Plastic Link. Earthq. Eng. Struct. Dyn. 2001, 30, 27–42. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Saumil, P. In-Plane Response of a Symmetric Space Frame with Sliding Upports. Int. J. Appl. Sci. Eng. 2005, 3, 1–11. [Google Scholar]
- Krishnamoorthy, A. An Absolute Displacement Approach for Modeling of Sliding Structures. Struct. Eng. Mech. 2008, 29, 659–671. [Google Scholar] [CrossRef] [Green Version]
- Zayas, V.A.; Low, S.S.; Mahin, S.A. A Simple Pendulum Technique for Achieving Seismic Isolation. Earthq. Spectra 1990, 6, 317–333. [Google Scholar] [CrossRef]
- Mokha, A.; Constantinou, M.C.; Reinhorn, A.M.; Zayas, V.A. Experimental Study of Friction-pendulum Isolation System. J. Struct. Eng. 1991, 117, 1201–1217. [Google Scholar] [CrossRef]
- Gilberto, M.; Whittaker, A.S.; Fenves, G.L.; Mahin, S.A. Experimental and Analytical Studies of the Friction Pendulum System for the Seismic Protection of Simple Bridges; Earthquake Engineering Research Center: Berkeley, CA, USA, 2004; p. 110. [Google Scholar]
- Jangid, R.S. Optimum Friction Pendulum System for Near-Fault Motions. Eng. Struct. 2005, 27, 349–359. [Google Scholar] [CrossRef]
- Castaldo, P.; Amendola, G. Optimal Sliding Friction Coefficients for Isolated Viaducts and Bridges: A Comparison Study. Struct. Contr. Health Monit. 2021, 28, e2838. [Google Scholar] [CrossRef]
- Vibhute, A.S.; Bharati, S.D.; Shrimali, M.K.; Datta, T.K. Optimum Coefficient of Friction in FPS for Base Isolation of Building Frames. Pract. Period. Struct. Des. Constr. 2022, 27, 04022042. [Google Scholar] [CrossRef]
- Tsai, C.S. Finite Element Formulations for Friction Pendulum Seismic Isolation Bearings. Int. J. Numer. Methods Eng. 1997, 40, 29–49. [Google Scholar] [CrossRef]
- Ryan, K.L.; Chopra, A.K. Estimating the Seismic Displacement of Friction Pendulum Isolators Based on Non-Linear Response History Analysis. Earthq. Eng. Struct. Dyn. 2004, 33, 359–373. [Google Scholar] [CrossRef]
- Mazza, F.; Sisinno, S. Nonlinear Dynamic Behavior of Base-Isolated Buildings with the Friction Pendulum System Subjected to near-Fault Earthquakes. Mech. Based Des. Struct. Mach. 2017, 45, 331–344. [Google Scholar] [CrossRef]
- Wang, Y.-P.; Chung, L.-L.; Liao, W.-H. Seismic Response Analysis of Bridges Isolated with Friction Pendulum Bearings. Earthq. Eng. Struct. Dyn. 1998, 27, 1069–1093. [Google Scholar] [CrossRef]
- Seleemah, A.A.; El-Sharkawy, M. Seismic Response of Base Isolated Liquid Storage Ground Tanks. Ain Shams Eng. J. 2011, 2, 33–42. [Google Scholar] [CrossRef] [Green Version]
- Whittaker, A.S.; Kumar, M.; Kumar, M. Seismic Isolation of Nuclear Power Plants. Nucl. Eng. Technol. 2014, 46, 569–580. [Google Scholar] [CrossRef] [Green Version]
- Almazán, J.L.; De La Llera, J.C.; Inaudi, J.A. Modelling Aspects of Structures Isolated with the Frictional Pendulum System. Earthq. Eng. Struct. Dyn. 1998, 27, 845–867. [Google Scholar] [CrossRef]
- Monti, G.; Petrone, F. Analytical Thermo-Mechanics 3D Model of Friction Pendulum Bearings. Earthq. Eng. Struct. Dyn. 2016, 45, 957–977. [Google Scholar] [CrossRef] [Green Version]
- Oliveto, N.D. Geometrically Nonlinear Analysis of Friction Pendulum Systems under Tri-Directional Excitation. Eng. Struct. 2022, 269, 114770. [Google Scholar] [CrossRef]
- Hall, J.F.; Heaton, T.H.; Halling, M.W.; Wald, D.J. Near-Source Ground Motion and Its Effects on Flexible Buildings. Earthq. Spectra 1995, 11, 569–605. [Google Scholar] [CrossRef] [Green Version]
- Pranesh, M.; Sinha, R. VFPI: An Isolation Device for Aseismic Design. Earthq. Eng. Struct. Dyn. 2000, 29, 603–627. [Google Scholar] [CrossRef]
- Tsai, C.S.; Chiang, T.-C.; Chen, B.-J. Finite Element Formulations and Theoretical Study for Variable Curvature Friction Pendulum System. Eng. Struct. 2003, 25, 1719–1730. [Google Scholar] [CrossRef]
- Lu, L.-Y.; Shih, M.-H.; Wu, C.-Y. Near-Fault Seismic Isolation Using Sliding Bearings with Variable Curvatures. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Lu, L.-Y.; Wang, J.; Hsu, C.-C. Sliding Isolation Variable Frequency Bearings for near—Fault Ground Motions. In Proceedings of the 4th International Conference on Earthquake Engineering, Taipei, Taiwan, 12–13 October 2006. [Google Scholar]
- Krishnamoorthy, A. Seismic Isolation of Bridges Using Variable Frequency and Variable Friction Pendulum Isolator System. Struct. Eng. Int. 2010, 20, 178–184. [Google Scholar] [CrossRef]
- Malu, G.; Murnal, P. Variable Coefficient of Friction: An Effective VFPI Parameter to Control near-Fault Ground Motions. ISET J. Earthq. Technol. 2012, 49, 73–87. [Google Scholar]
- Calvi, P.M.; Moratti, M.; Calvi, G.M. Seismic Isolation Devices Based on Sliding between Surfaces with Variable Friction Coefficient. Earthq. Spectra 2016, 32, 2291–2315. [Google Scholar] [CrossRef]
- Brito, M.B.; Ishibashi, H.; Akiyama, M. Shaking Table Tests of a Reinforced Concrete Bridge Pier with a Low-cost Sliding Pendulum System. Earthq. Eng. Struct. Dyn. 2019, 48, 366–386. [Google Scholar] [CrossRef]
- Tsai, C.S.; Chiang, T.-C.; Chen, B.-J. Experimental Study for Multiple Friction Pendulum System. In Proceedings of the 13th World Conference on Earthquake Engineering, Vancouver, BC, Canada, 1–6 August 2004. [Google Scholar]
- Fenz, D.M.; Constantinou, M.C. Behaviour of the Double Concave Friction Pendulum Bearing. Earthq. Eng. Struct. Dyn. 2006, 35, 1403–1424. [Google Scholar] [CrossRef]
- Fenz, D.M.; Constantinou, M.C. Modeling Triple Friction Pendulum Bearings for Response-History Analysis. Earthq. Spectra 2008, 24, 1011–1028. [Google Scholar] [CrossRef]
- Fenz, D.M.; Constantinou, M.C. Spherical Sliding Isolation Bearings with Adaptive Behavior: Theory. Earthq. Eng. Struct. Dyn. 2008, 37, 163–183. [Google Scholar] [CrossRef]
- Fenz, D.M.; Constantinou, M.C. Spherical Sliding Isolation Bearings with Adaptive Behavior: Experimental Verification. Earthq. Eng. Struct. Dyn. 2008, 37, 185–205. [Google Scholar] [CrossRef]
- Becker, T.C.; Mahin, S.A. Experimental and Analytical Study of the Bi-Directional Behavior of the Triple Friction Pendulum Isolator. Earthq. Eng. Struct. Dyn. 2012, 41, 355–373. [Google Scholar] [CrossRef]
- Sarlis, A.A.; Constantinou, M.C. A Model of Triple Friction Pendulum Bearing for General Geometric and Frictional Parameters: Revised Triple Friction Pendulum Bearing Model. Earthq. Eng. Struct. Dyn. 2016, 45, 1837–1853. [Google Scholar] [CrossRef]
- Morgan, T.A.; Mahin, S.A. Achieving Reliable Seismic Performance Enhancement Using Multi-Stage Friction Pendulum Isolators. Earthq. Eng. Struct. Dyn. 2010, 39, 1443–1461. [Google Scholar] [CrossRef]
- Becker, T.C.; Bao, Y.; Mahin, S.A. Extreme Behavior in a Triple Friction Pendulum Isolated Frame. Earthq. Eng. Struct. Dyn. 2017, 46, 2683–2698. [Google Scholar] [CrossRef]
- Lee, D.; Constantinou, M.C. Quintuple Friction Pendulum Isolator: Behavior, Modeling, and Validation. Earthq. Spectra 2016, 32, 1607–1626. [Google Scholar] [CrossRef]
- Keikha, H.; Amiri, G.G. Seismic Performance Assessment of Quintuple Friction Pendulum Isolator with a Focus on Frictional Behavior Impressionability from Velocity and Temperature. J. Earthq. Eng. 2019, 25, 1256–1286. [Google Scholar] [CrossRef]
- Sodha, A.; Vasanwala, S.A.; Soni, D. Probabilistic Evaluation of Seismically Isolated Building Using Quintuple Friction Pendulum Isolator. In Advances in Intelligent Systems and Computing; Springer: Singapore, 2019; pp. 149–159. ISBN 9789811319655. [Google Scholar]
- Marin-Artieda Claudia, C.; Whittaker Andrew, S. Theoretical Studies of the XY-FP Seismic Isolation Bearing for Bridges. J. Bridge Eng. 2010, 15, 631–638. [Google Scholar] [CrossRef]
- Yang, C.-Y.; Wang, S.-J.; Lin, C.-K.; Chung, L.-L.; Liou, M.-C. Analytical and Experimental Study on Sloped Sliding-Type Bearings. Struct. Control Health Monit. 2021, 28, e2828. [Google Scholar] [CrossRef]
- Tabor, D. Friction—The Present State of Our Understanding. J. Lubr. Technol. 1981, 103, 169–179. [Google Scholar] [CrossRef]
- Constantinou, M.; Tsopelas, P.; Kasalanati, A.; Wolff, E. Property Modification Factors for Seismic Isolation Bearings; MCEER-99-0012; State University of New York at Buffalo (NY): Buffalo, NY, USA, 1999. [Google Scholar]
- Constantinou, M.C.; Caccese, J.; Harris, H.G. Frictional Characteristics of Teflon–Steel Interfaces under Dynamic Conditions. Earthq. Eng. Struct. Dyn. 1987, 15, 751–759. [Google Scholar] [CrossRef]
- Mokha, A.; Constantinou, M.; Reinhorn, A. Teflon Bearings in Base Isolation I: Testing. J. Struct. Eng. 1990, 116, 438–454. [Google Scholar] [CrossRef]
- Mokha, A.; Constantinou, M.; Reinhorn, A. Teflon Bearings in Base Isolation II: Modeling. J. Struct. Eng. 1990, 116, 455–474. [Google Scholar] [CrossRef]
- Flom, D.G.; Porile, N.T. Friction of Teflon Sliding on Teflon. J. Appl. Phys. 1955, 26, 1088–1092. [Google Scholar] [CrossRef]
- Makinson, K.R.; Tabor, D. The Friction and Transfer of Polytetrafluoroethylene. Proc. R. Soc. London. Ser. A. Math. Phys. Sci. 1964, 281, 49–61. [Google Scholar] [CrossRef]
- Castaldo, P.; Tubaldi, E. Influence of FPS Bearing Properties on the Seismic Performance of Base-Isolated Structures. Earthq. Eng. Struct. Dyn. 2015, 44, 2817–2836. [Google Scholar] [CrossRef]
- Mokha, A.; Constantinou, M.C.; Reinhorn, A.M. Teflon Bearings in Aseismic Base Isolation: Experimental Studies and Mathematical Modeling; NCEER-88-0038; State University of New York at Buffalo (NY): Buffalo, NY, USA, 1988. [Google Scholar]
- Computer and Structures Inc. CSI Analysis Reference Manual for SAP2000; Computer and Structures Inc.: Berkley, CA, USA, 2010. [Google Scholar]
- Bondonet, G.; Filiatrault, A. Frictional Response of PTFE Sliding Bearings at High Frequencies. J. Bridge Eng. 1997, 2, 139–148. [Google Scholar] [CrossRef]
- Mosqueda, G.; Whittaker Andrew, S.; Fenves Gregory, L. Characterization and Modeling of Friction Pendulum Bearings Subjected to Multiple Components of Excitation. J. Struct. Eng. 2004, 130, 433–442. [Google Scholar] [CrossRef]
- Constantinou, M.C.; Whittaker, A.S.; Kalpakidis, Y.; Fenz, D.M.; Warn, G.P. Performance of Seismic Isolation Hardware under Service and Seismic Loading; MCEER-07-0012; State University of New York at Buffalo (NY): Buffalo, NY, USA, 2007. [Google Scholar]
- Dolce, M.; Cardone, D.; Croatto, F. Frictional Behavior of Steel-PTFE Interfaces for Seismic Isolation. Bull. Earthq. Eng. 2005, 3, 75–99. [Google Scholar] [CrossRef]
- Quaglini, V.; Bocciarelli, M.; Gandelli, E.; Dubini, P. Numerical Assessment of Frictional Heating in Sliding Bearings for Seismic Isolation. J. Earthq. Eng. 2014, 18, 1198–1216. [Google Scholar] [CrossRef]
- Gandelli, E. Advanced Tools for the Design of Sliding Isolation Systems for Seismic-Retrofitting of Hospitals. Ph.D. Thesis, Politecnico di Milano, Milan, Italy, 2017. [Google Scholar]
- De Domenico, D.; Ricciardi, G.; Infanti, S.; Benzoni, G. Frictional Heating in Double Curved Surface Sliders and Its Effects on the Hysteretic Behavior: An Experimental Study. Front. Built Environ. 2019, 5, 74. [Google Scholar] [CrossRef] [Green Version]
- Kumar, M.; Whittaker, A.S.; Constantinou, M.C. Characterizing Friction in Sliding Isolation Bearings. Earthq. Eng. Struct. Dyn. 2015, 44, 1409–1425. [Google Scholar] [CrossRef]
- Barone, S.; Calvi, G.M.; Pavese, A. Experimental Dynamic Response of Spherical Friction-Based Isolation Devices. J. Earthq. Eng. 2019, 23, 1465–1484. [Google Scholar] [CrossRef]
- Buckle, I.G.; Constantinou, M.; Dicleli, M.; Ghasemi, H. Seismic Isolation of Highway Bridges; MCEER-06-SP07; State University of New York at Buffalo (NY): Buffalo, NY, USA, 2006. [Google Scholar]
- Constantinou, M.C.; Kalpakidis, Y.; Filiatrault, A.; Ecker Lay, R.A. LRFD-Based Analysis and Design Procedures for Bridge Bearings and Seismic Isolators; MCEER-11-0004; State University of New York at Buffalo (NY): Buffalo, NY, USA, 2011. [Google Scholar]
- Buckle, I.; Al-Ani, M.; Monzon, E. Seismic Isolation Design Examples of Highway Bridges; NCHRP 20-7/Task 262 (M2); University of Nevada Reno: Reno, NV, USA, 2011. [Google Scholar]
- American Association of State Highway and Transportation Officials. Guide Specifications for Seismic Isolation Design; American Association of State Highway and Transportation Officials: Washington, DC, USA, 1999. [Google Scholar]
- American Society of Civil Engineers. Minimum Design Loads and Associated Criteria for Buildings and other Structures; ASCE/SEI 7-2016; American Society of Civil Engineers: Reston, VA, USA, 2016. [Google Scholar]
- CEN 1337-1; Structural Bearings—Part 1: General Design Rules. European Committee for Standardization: Bruxelles, Belgium, 2000.
- CEN 15129; Anti-Seismic Devices. European Committee for Standardization: Bruxelles, Belgium, 2009.
- BSLEO. Building Standard Law; [2000/2016]; Building Center of Japan, Chiyoda-ku: Tokyo, Japan, 2016. [Google Scholar]
- Guideline for the Design of Seismic Isolation Systems for Buildings—Draft for Trial Use; New Zealand Society for Earthquake Engineering Inc.: Wellington, New Zealand, 2019.
- Sarlis, A.A.; Constantinou, M.C. Model of Triple Friction Pendulum Bearing for General Geometric and Frictional Parameters and for Uplift Conditions; MCEER-13-0010; State University of New York at Buffalo (NY): Buffalo, NY, USA, 2013. [Google Scholar]
- Bao, Y.; Becker, T.C.; Hamaguchi, H. Failure of Double Friction Pendulum Bearings under Pulse-Type Motions. Earthq. Eng. Struct. Dyn. 2017, 46, 715–732. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Reinhorn, A.M.; Constantinou, M.C. Experimental Study of Sliding Isolated Structures with Uplift Restraint. J. Struct. Eng. 1992, 118, 1666–1682. [Google Scholar] [CrossRef] [Green Version]
- Xiong, W.; Zhang, S.-J.; Jiang, L.-Z.; Li, Y.-Z. Introduction of the Convex Friction System (CFS) for Seismic Isolation. Struct. Control Health Monit. 2017, 24, e1861. [Google Scholar] [CrossRef]
- Xiong, W.; Zhang, S.-J.; Jiang, L.-Z.; Li, Y.-Z. The Multangular-Pyramid Concave Friction System (MPCFS) for Seismic Isolation: A Preliminary Numerical Study. Eng. Struct. 2018, 160, 383–394. [Google Scholar] [CrossRef]
- Roussis, P.C.; Constantinou, M.C. Uplift-Restraining Friction Pendulum Seismic Isolation System. Earthq. Eng. Struct. Dyn. 2006, 35, 577–593. [Google Scholar] [CrossRef]
- Guéraud, R.; Noël-Leroux, J.-P.; Livolant, M.; Michalopoulos, A.P. Seismic Isolation Using Sliding-Elastomer Bearing Pads. Nucl. Eng. Des. 1985, 84, 363–377. [Google Scholar] [CrossRef]
- Mostaghel, N.; Khodaverdian, M. Dynamics of Resilient-Friction Base Isolator (R-FBI). Earthq. Eng. Struct. Dyn. 1987, 15, 379–390. [Google Scholar] [CrossRef]
- Kelly, J.M.; Chalhoub, M.S. Earthquake Simulator Testing of a Combined Sliding Bearing and Rubber Bearing Isolation System; Earthquake Engineering Research Center, College of Engineering, University of California: Berkeley, CA, USA, 1990. [Google Scholar]
- Constantinou, M.C.; Mokha, A.S.; Reinhorn, A.M. Study of Sliding Bearing and Helical-steel-spring Isolation System. J. Struct. Eng. 1991, 117, 1257–1275. [Google Scholar] [CrossRef]
- Wei, X.; Li-Zhong, J.; Zhi-Hui, Z.; Yao-Zhuang, L. Introduction of Flat-Spring Friction System for Seismic Isolation. Soil Dyn. Earthq. Eng. 2021, 145, 106649. [Google Scholar] [CrossRef]
- Chakraborty, S.; Roy, K.; Ray-Chaudhuri, S. Design of Re-Centering Spring for Flat Sliding Base Isolation System: Theory and a Numerical Study. Eng. Struct. 2016, 126, 66–77. [Google Scholar] [CrossRef]
- Tsopelas, P.; Constantinou, M.C.; Okamoto, S.; Fujii, S.; Ozaki, D. Experimental Study of Bridge Seismic Sliding Isolation Systems. Eng. Struct. 1996, 18, 301–310. [Google Scholar] [CrossRef]
- Makris, N.; Chang, S.-P. Effect of Viscous, Viscoplastic and Friction Damping on the Response of Seismic Isolated Structures. Earthq. Eng. Struct. Dyn. 2000, 29, 85–107. [Google Scholar] [CrossRef]
- Chang, S.-P.; Makris, N.; Whittaker, A.S.; Thompson, A.C.T. Experimental and Analytical Studies on the Performance of Hybrid Isolation Systems. Earthq. Eng. Struct. Dyn. 2002, 31, 421–443. [Google Scholar] [CrossRef]
- Soneji, B.B.; Jangid, R.S. Passive Hybrid Systems for Earthquake Protection of Cable-Stayed Bridge. Eng. Struct. 2007, 29, 57–70. [Google Scholar] [CrossRef]
- Providakis, C.P. Effect of Supplemental Damping on LRB and FPS Seismic Isolators under Near-Fault Ground Motions. Soil Dyn. Earthq. Eng. 2009, 29, 80–90. [Google Scholar] [CrossRef]
- Krishnamoorthy, A. Variable Curvature Pendulum Isolator and Viscous Fluid Damper for Seismic Isolation of Structures. J. Vib. Control 2011, 17, 1779–1790. [Google Scholar] [CrossRef]
- Krishnamoorthy, A. Seismic Control of Continuous Bridges Using Variable Radius Friction Pendulum Systems and Viscous Fluid Dampers. Int. J. Acoust. Vib. 2015, 20, 24–35. [Google Scholar] [CrossRef]
- Wolff, E.D.; Ipek, C.; Constantinou, M.C.; Tapan, M. Effect of Viscous Damping Devices on the Response of Seismically Isolated Structures. Earthq. Eng. Struct. Dyn. 2014, 44, 185–198. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, P. Shaking Table Tests and Numerical Studies on the Effect of Viscous Dampers on an Isolated RC Building by Friction Pendulum Bearings. Soil Dyn. Earthq. Eng. 2017, 100, 330–344. [Google Scholar] [CrossRef]
- Chen, X.; Xiong, J. Seismic Resilient Design with Base Isolation Device Using Friction Pendulum Bearing and Viscous Damper. Soil Dyn. Earthq. Eng. 2022, 153, 107073. [Google Scholar] [CrossRef]
- Hartog, J.P.D. Forced Vibrations with Combined Viscous and Coulomb Damping. Lond. Edinb. Dublin Philos. Mag. J. Sci. 1930, 9, 801–817. [Google Scholar] [CrossRef]
- Yeh, G.C.K. Forced Vibrations of a Two-degree-of-freedom System with Combined Coulomb and Viscous Damping. J. Acoust. Soc. Am. 1966, 39, 14–24. [Google Scholar] [CrossRef]
- Soong, T.T.; Manolis, G.D. Active Structures. J. Struct. Eng. 1987, 113, 2290–2302. [Google Scholar] [CrossRef]
- Cha, J.Z.; Pitarresi, J.M.; Soong, T.T. Optimal Design Procedures for Active Structures. J. Struct. Eng. 1988, 114, 2710–2723. [Google Scholar] [CrossRef]
- Inaudi, J.; López-Almansa, F.; Kelly, J.M.; Rodellar, J. Predictive Control of Base-Isolated Structures. Earthq. Eng. Struct. Dyn. 1992, 21, 471–482. [Google Scholar] [CrossRef]
- Chang, C.-M.; Spencer, B.F., Jr. Active Base Isolation of Buildings Subjected to Seismic Excitations. Earthq. Eng. Struct. Dyn. 2010, 39, 1493–1512. [Google Scholar] [CrossRef]
- Soong, T.T.; Reinhorn, A.M.; Aizawa, S.; Higashino, M. Recent Structural Applications of Active Control Technology. J. Struct. Control 1994, 1, 1–21. [Google Scholar] [CrossRef]
- Soong, T.T.; Masri, S.F.; Housner, G.W. An Overview of Active Structural Control under Seismic Loads. Earthq. Spectra 1991, 7, 483–505. [Google Scholar] [CrossRef] [Green Version]
- Datta, T.K. A State-of-the-Art Review on Active Control of Structures. ISET J. Earthq. Technol. 2003, 40, 1–17. [Google Scholar]
- Soong, T.T.; Spencer, B.F. Active, Semi-Active and Hybrid Control of Structures. Bull. N. Z. Soc. Earthq. Eng. 2000, 33, 387–402. [Google Scholar] [CrossRef] [Green Version]
- Feng, M.Q.; Shinozuka, M.; Fujii, S. Friction-controllable Sliding Isolation System. J. Eng. Mech. 1993, 119, 1845–1864. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Feng, M.Q.; Shinozuka, M. Control of Structures with Friction Controllable Sliding Isolation Bearings. Soil Dyn. Earthq. Eng. 1993, 12, 103–112. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Riley, M.A.; Reinhorn, A. Control of Sliding-isolated Bridge with Absolute Acceleration Feedback. J. Eng. Mech. 1993, 119, 2317–2332. [Google Scholar] [CrossRef]
- Yang, J.N.; Wu, J.C.; Kawashima, K.; Unjoh, S. Hybrid Control of Seismic-Excited Bridge Structures. Earthq. Eng. Struct. Dyn. 1995, 24, 1437–1451. [Google Scholar] [CrossRef]
- Yang, J.N.; Wu, J.C.; Reinhorn, A.M.; Riley, M. Control of Sliding-Isolated Buildings Using Sliding-Mode Control. J. Struct. Eng. 1996, 122, 179–186. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. Seismic Response Reduction Using Magnetorheological Dampers. IFAC Proc. Vol. 1996, 29, 5530–5535. [Google Scholar] [CrossRef]
- Dyke, S.J.; Spencer, B.F.; Sain, M.K.; Carlson, J.D. Modeling and Control of Magnetorheological Dampers for Seismic Response Reduction. Smart Mater. Struct. 1996, 5, 565–575. [Google Scholar] [CrossRef]
- Spencer, B.F.; Dyke, S.J.; Sain, M.K.; Carlson, J.D. Phenomenological Model for Magnetorheological Dampers. J. Eng. Mech. 1997, 123, 230–238. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Sahasrabudhe, S.; Iyer, R. Earthquake Protection of Bridges Using Sliding Isolation System and MR Dampers. In Structural Control for Civil and Infrastructure Engineering; World Scientific: Singapore, 2001; pp. 375–383. [Google Scholar]
- Sahasrabudhe, S.S.; Nagarajaiah, S. Semi-Active Control of Sliding Isolated Bridges Using MR Dampers: An Experimental and Numerical Study. Earthq. Eng. Struct. Dyn. 2005, 34, 965–983. [Google Scholar] [CrossRef]
- Kim, H.-S.; Roschke, P.N. Design of Fuzzy Logic Controller for Smart Base Isolation System Using Genetic Algorithm. Eng. Struct. 2006, 28, 84–96. [Google Scholar] [CrossRef]
- Wongprasert, N.; Symans, M.D. Numerical Evaluation of Adaptive Base-Isolated Structures Subjected to Earthquake Ground Motions. J. Eng. Mech. 2005, 131, 109–119. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Bhat, S.; Bhasari, D. Radial Basis Function Neural Network Algorithm for Semi-active Control of Base-isolated Structures. Struct Control Health Monit. 2017, 24, e1984. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Sahasrabudhe, S. Seismic Response Control of Smart Sliding Isolated Buildings Using Variable Stiffness Systems: An Experimental and Numerical Study. Earthq. Eng. Struct. Dyn. 2006, 35, 177–197. [Google Scholar] [CrossRef]
- Peng, P.; Dongbin, Z.; Yi, Z.; Yachun, T.; Xin, N. Development of a Tunable Friction Pendulum System for Semi-Active Control of Building Structures under Earthquake Ground Motions. Earthq. Eng. Struct. Dyn. 2018, 47, 1706–1721. [Google Scholar] [CrossRef]
- Zhang, D.; Pan, P.; Zeng, Y.; Guo, Y. A Novel Robust Optimum Control Algorithm and Its Application to Semi-Active Controlled Base-Isolated Structures. Bull. Earthq. Eng. 2020, 18, 2431–2460. [Google Scholar] [CrossRef]
- Zeng, Y.; Pan, P.; Guo, Y. Development of Distributed Tunable Friction Pendulum System (DTFPS) for Semi-Active Control of Base-Isolated Buildings. Bull. Earthq. Eng. 2021, 19, 6243–6268. [Google Scholar] [CrossRef]
- Rai, D.C.; Prasad, A.M.; Jain, S.K.; Rao, G.; Patel, P. Hospitals and Schools. Earthq. Spectra 2002, 18, 265–277. [Google Scholar] [CrossRef]
- Mayes, R.L.; Brown, A.G.; Pietra, D. Using Seismic Isolation and Energy Dissipation to Create Earthquake-Resilient Buildings. BNZSEE 2012, 45, 117–122. [Google Scholar] [CrossRef]
- Taflanidis, A.A.; Beck, J.L. Life-Cycle Cost Optimal Design of Passive Dissipative Devices. Struct. Saf. 2009, 31, 508–522. [Google Scholar] [CrossRef]
- Goda, K.; Lee, C.S.; Hong, H.P. Lifecycle Cost–Benefit Analysis of Isolated Buildings. Struct. Saf. 2010, 32, 52–63. [Google Scholar] [CrossRef]
- Kilar, V.; Petrovčič, S.; Koren, D.; Šilih, S. Cost Viability of a Base Isolation System for the Seismic Protection of a Steel High-Rack Structure. Int. J. Steel Struct. 2013, 13, 253–263. [Google Scholar] [CrossRef]
- Jiang, S.; Yao, S.; Liu, D. Economic Performance Analysis of Seismic Isolation, Energy Dissipation, and Traditional Seismic Structures. E3S Web Conf. 2021, 248, 01032. [Google Scholar] [CrossRef]
- Mayes, R.L.; Jones, L.R.; Kelly, T.E. The Economics of Seismic Isolation in Buildings. Earthq. Spectra 1990, 6, 245–263. [Google Scholar] [CrossRef]
- Egbelakin, T.; Ogunmakinde, O.E.; Omotayo, T.; Sojobi, A. Demystifying the Barriers and Motivators for the Adoption of Base Isolation Systems in New Zealand. Buildings 2022, 12, 522. [Google Scholar] [CrossRef]
- Clemente, P.; Buffarini, G. Base Isolation: Design and Optimization Criteria. J. Anti-Seism. Syst. Int. Soc. 2010, 1, 17–40. [Google Scholar] [CrossRef] [Green Version]
- Castaldo, P.; Palazzo, B.; Della Vecchia, P. Life-Cycle Cost and Seismic Reliability Analysis of 3D Systems Equipped with FPS for Different Isolation Degrees. Eng. Struct. 2016, 125, 349–363. [Google Scholar] [CrossRef]
- Saitta, F.; Clemente, P.; Buffarini, G.; Bongiovanni, G.; Salvatori, A.; Grossi, C. Base Isolation of Buildings with Curved Surface Sliders: Basic Design Criteria and Critical Issues. Adv. Civ. Eng. 2018, 2018, 1569683. [Google Scholar] [CrossRef]
Figure 1.
Isolation system patented by Touaillon [4].
Figure 1.
Isolation system patented by Touaillon [4].

Figure 2.
Schematics of a typical friction pendulum bearing.

Figure 3.
Comparison of various sliding isolation system geometries [10].
Figure 3.
Comparison of various sliding isolation system geometries [10].

Figure 4.
Schematics of a double pendulum friction bearing.

Figure 5.
Schematics of a triple pendulum friction bearing.

Figure 6.
Schematics of a quintuple pendulum friction bearing.

Figure 7.
Idealized force-displacement relationship for various isolators. (a) P-F isolator, (b) FP isolator, (c) double concave friction bearing, (d) triple pendulum bearing, (e) quintuple friction pendulum isolator.
Figure 7.
Idealized force-displacement relationship for various isolators. (a) P-F isolator, (b) FP isolator, (c) double concave friction bearing, (d) triple pendulum bearing, (e) quintuple friction pendulum isolator.


Figure 8.
Schematics of a XY-FP [72].
Figure 8.
Schematics of a XY-FP [72].

Figure 9.
Coulomb friction model of a SDOF.

Figure 10.
Mathematical model of a two-DOF sliding system.

Figure 11.
Structure considered by Yang et al. [32]. (a) MDOF system with fictitious spring, (b) force-displacement bbehavior of the spring.
Figure 11.
Structure considered by Yang et al. [32]. (a) MDOF system with fictitious spring, (b) force-displacement bbehavior of the spring.

Figure 12.
Structure considered by Vafai et al. [33]. (a) MDOF system with fictitious spring, (b) force-displacement behavior of rigid plastic link.
Figure 12.
Structure considered by Vafai et al. [33]. (a) MDOF system with fictitious spring, (b) force-displacement behavior of rigid plastic link.

Figure 13.
Schematics of an MR damper.


{kind=link}
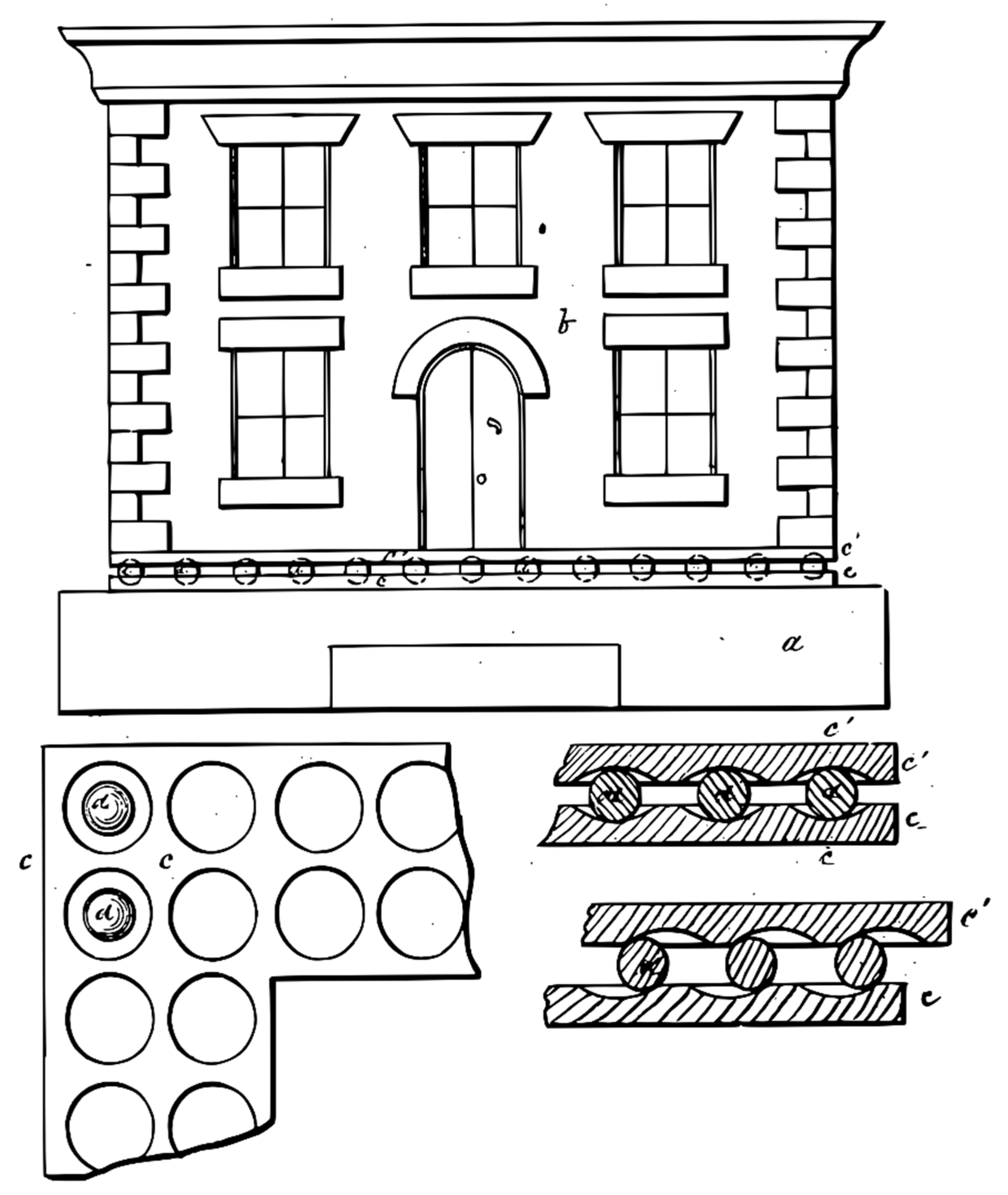{kind=link}
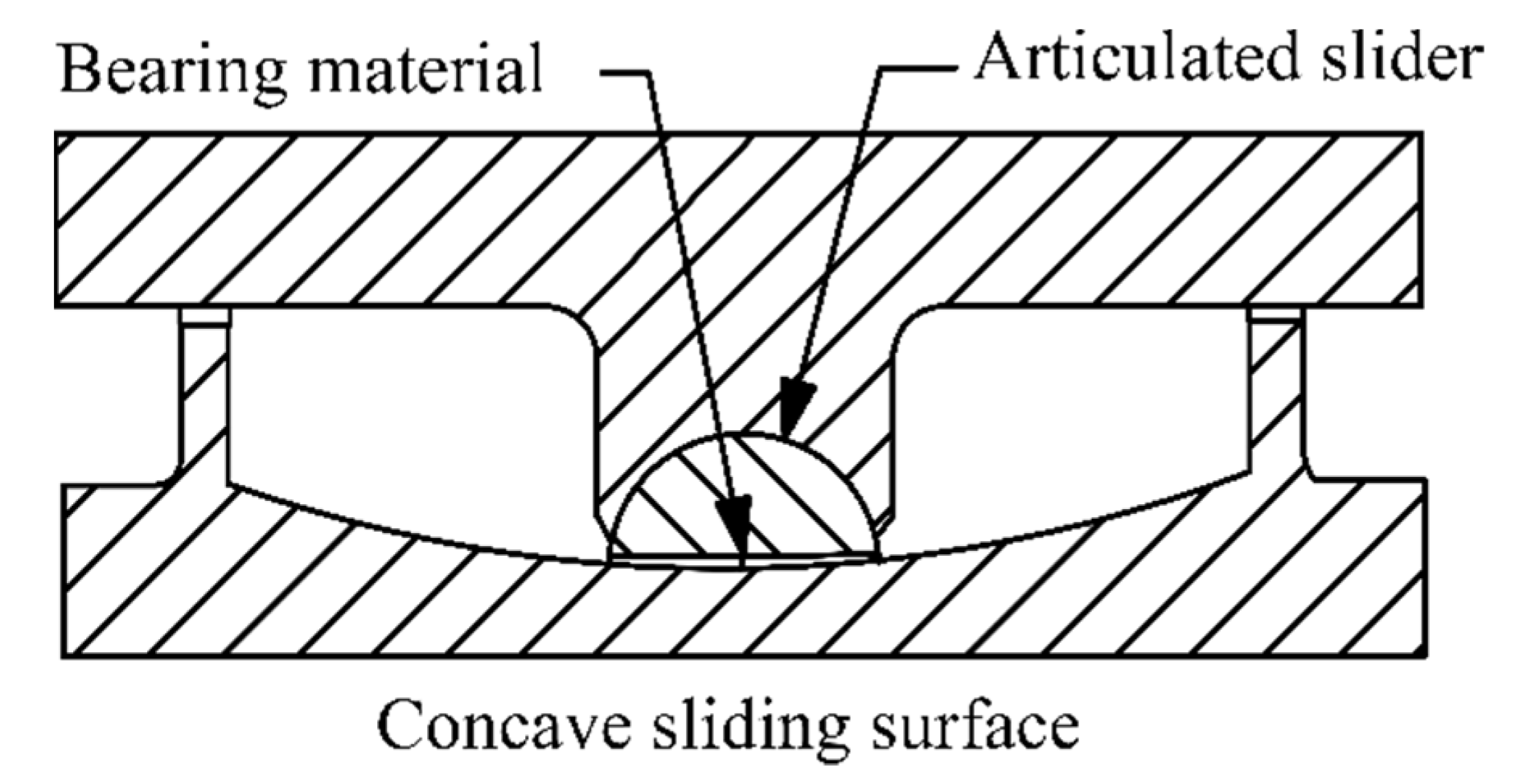{kind=link}
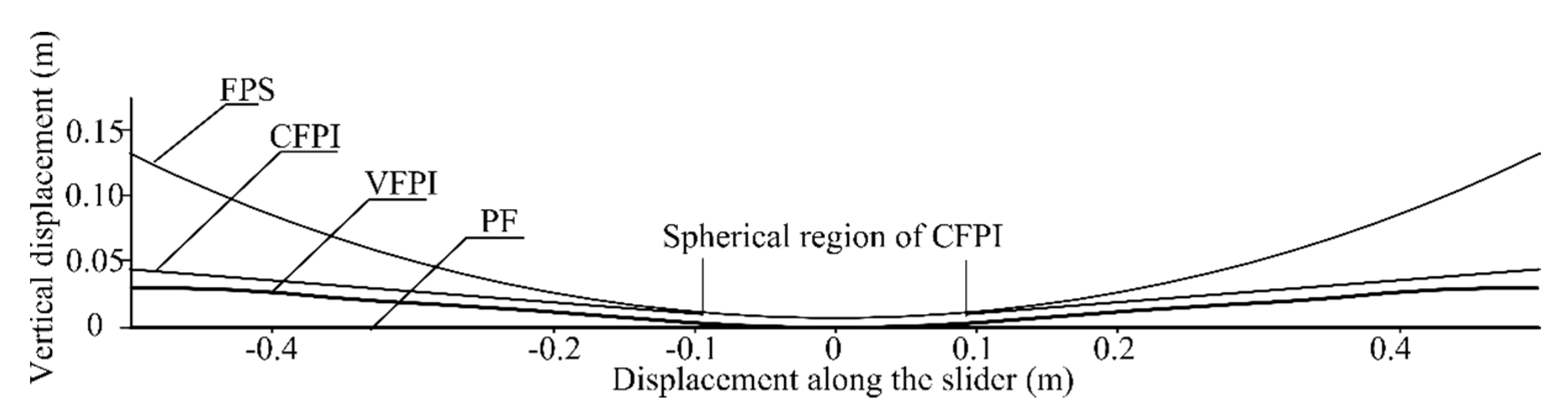{kind=link}
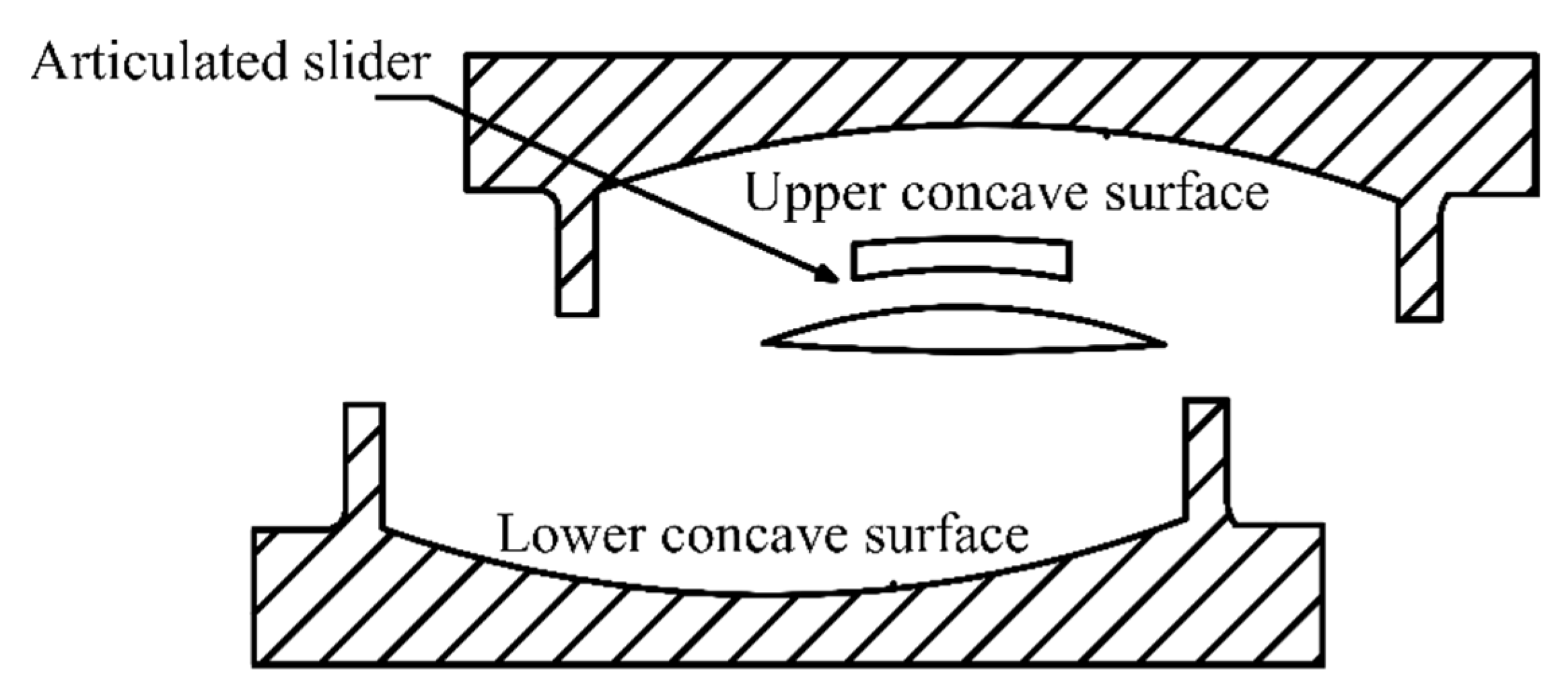{kind=link}
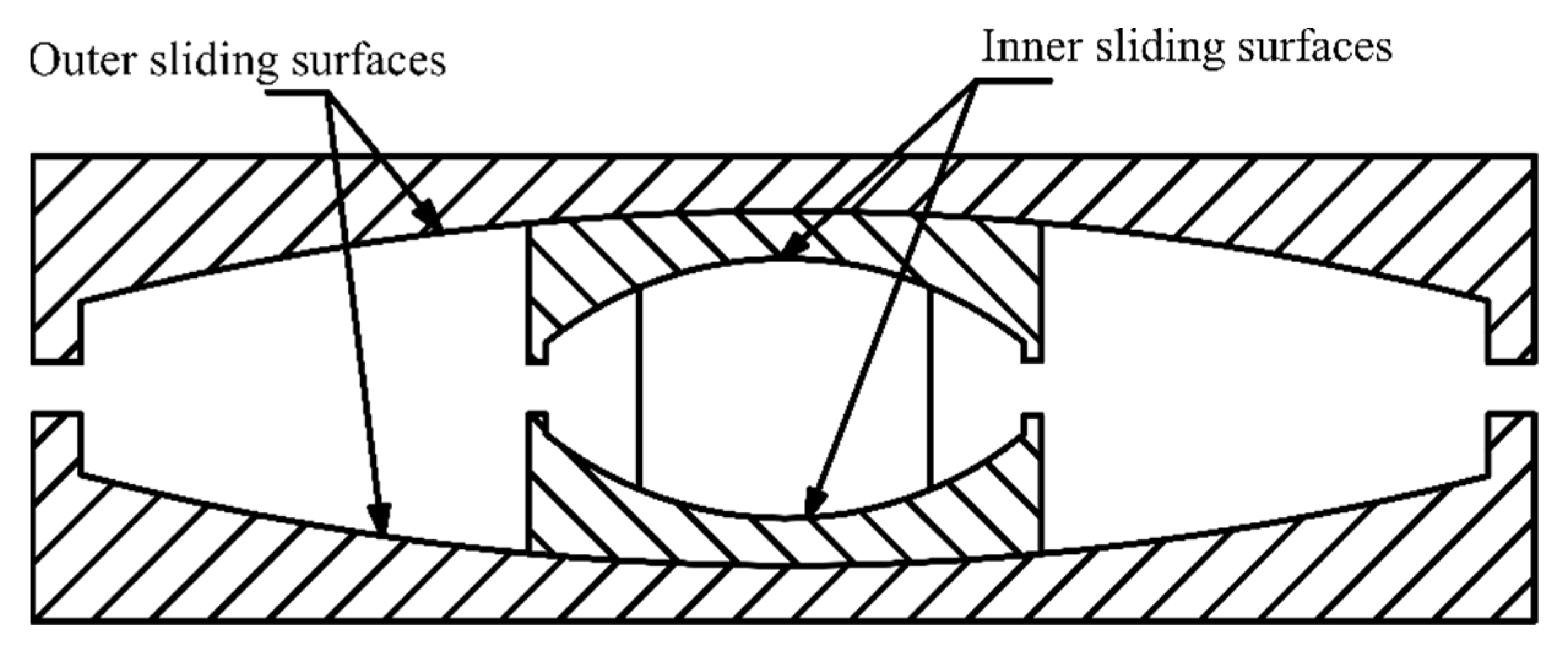{kind=link}
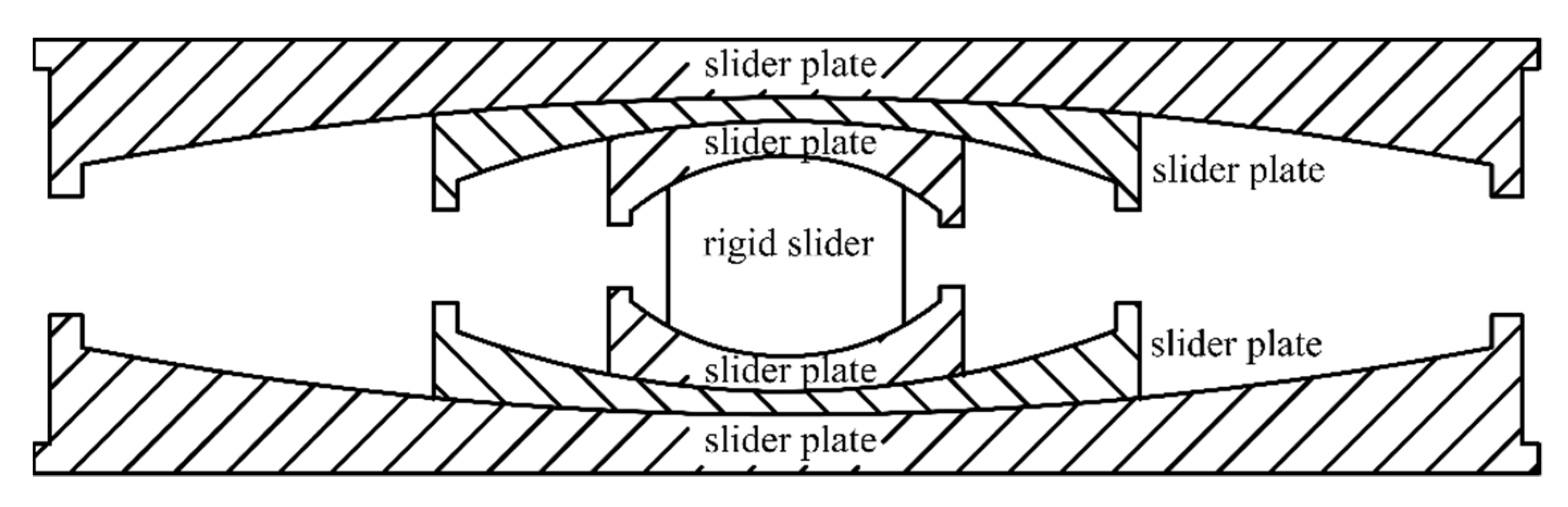{kind=link}
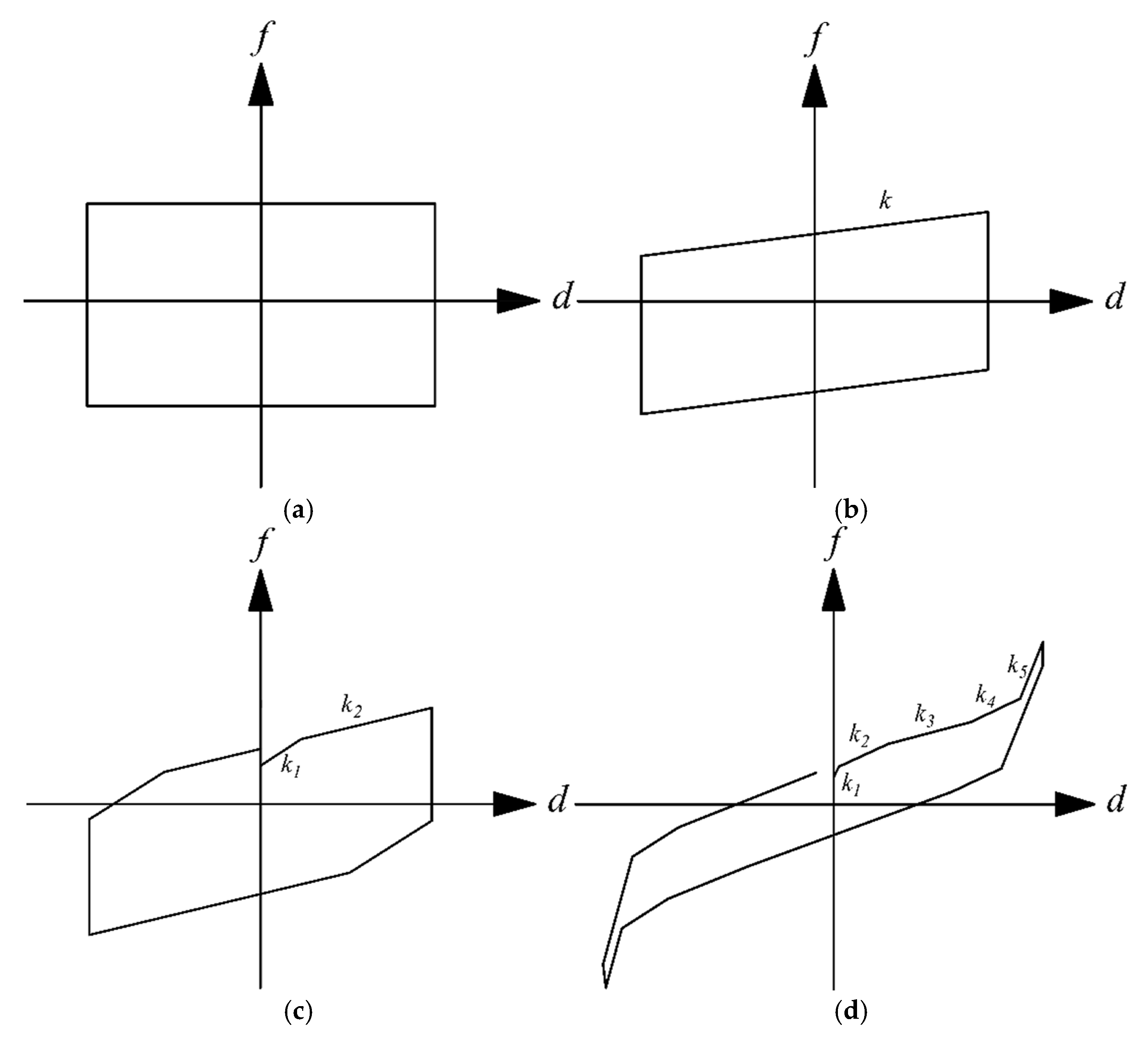{kind=link}
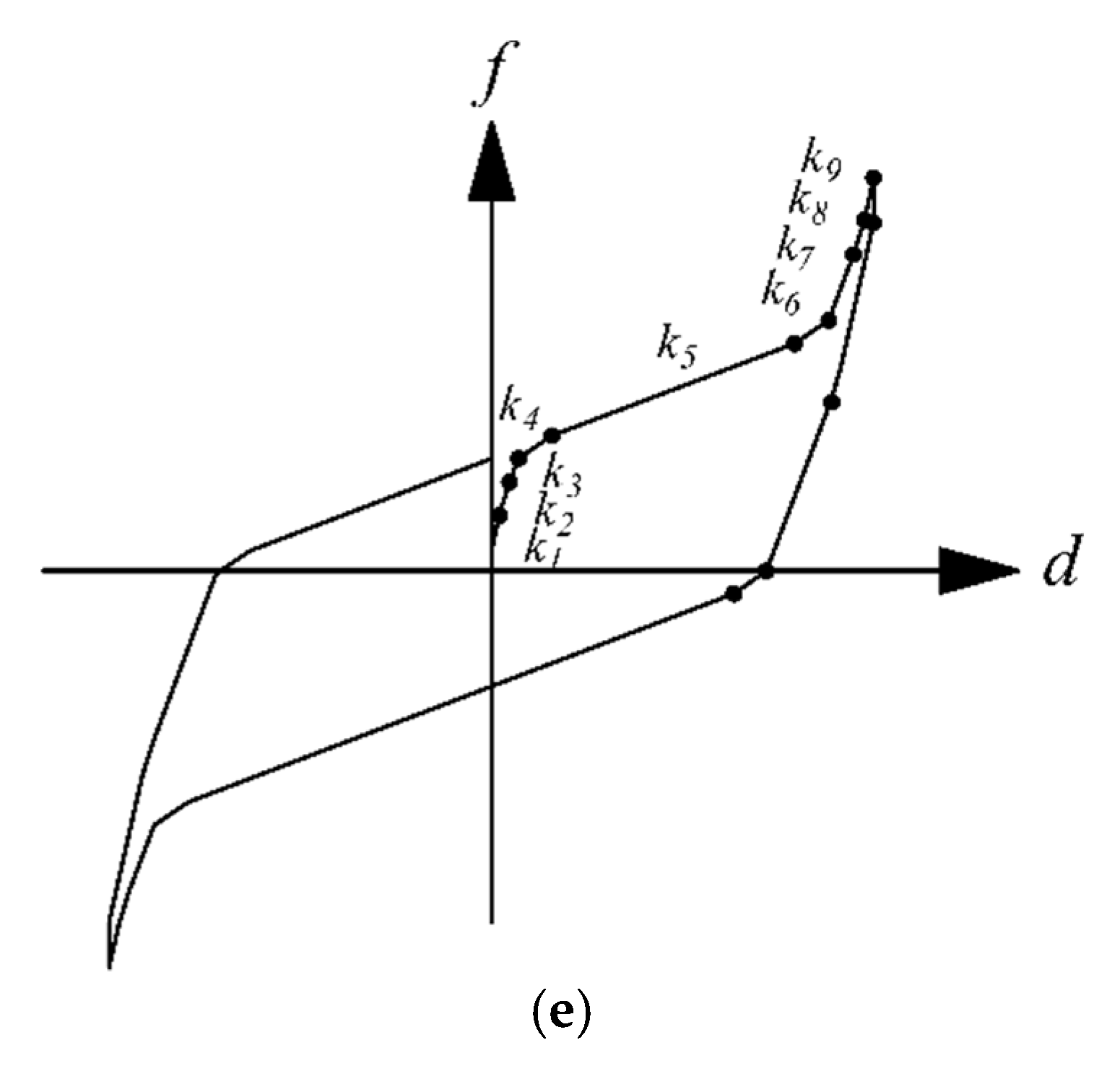{kind=link}
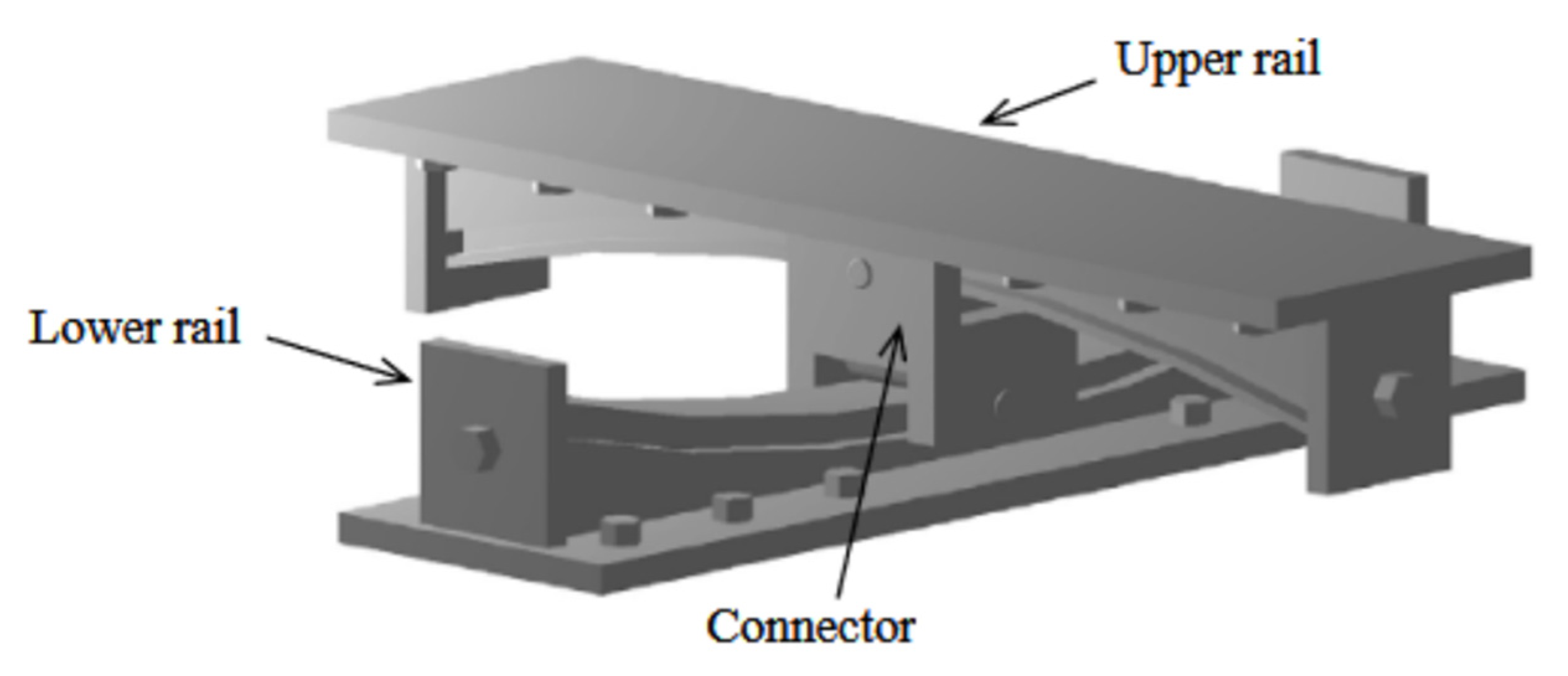{kind=link}
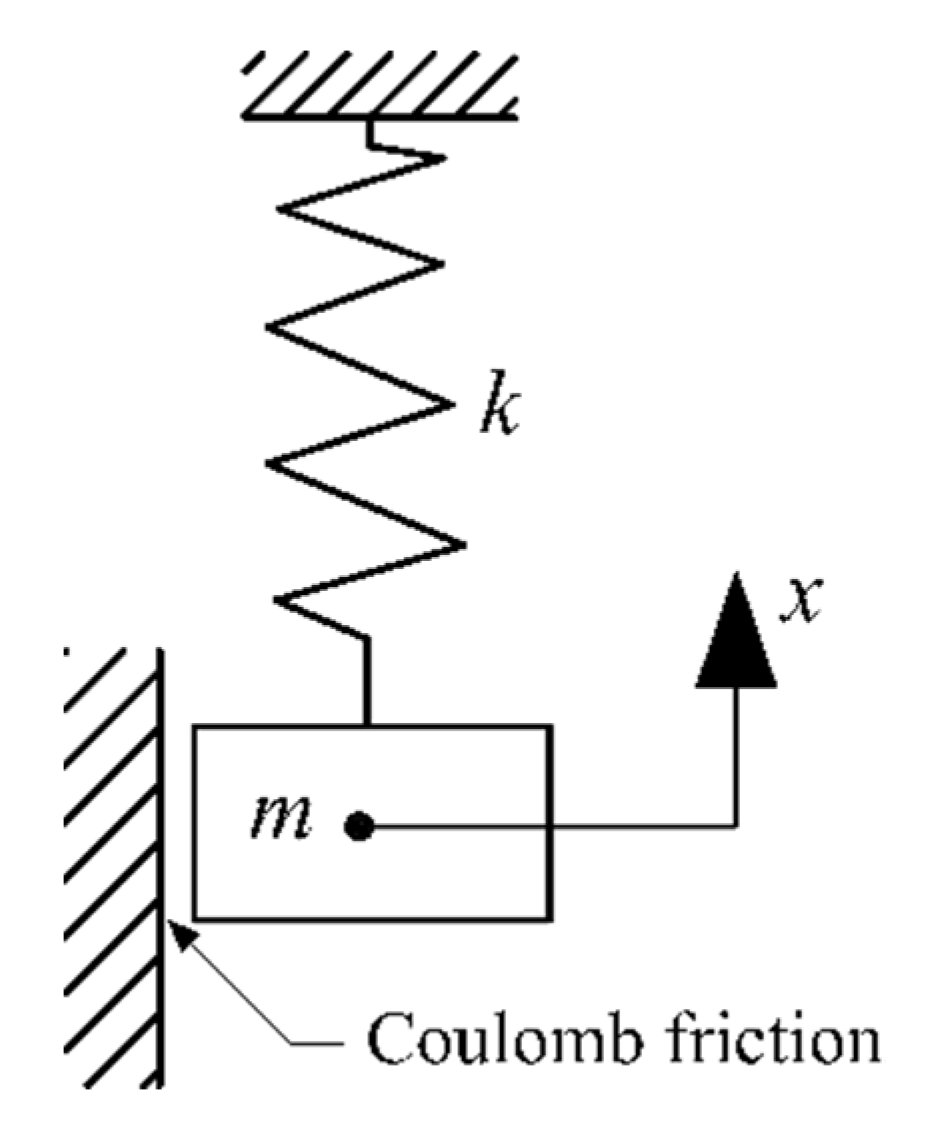{kind=link}
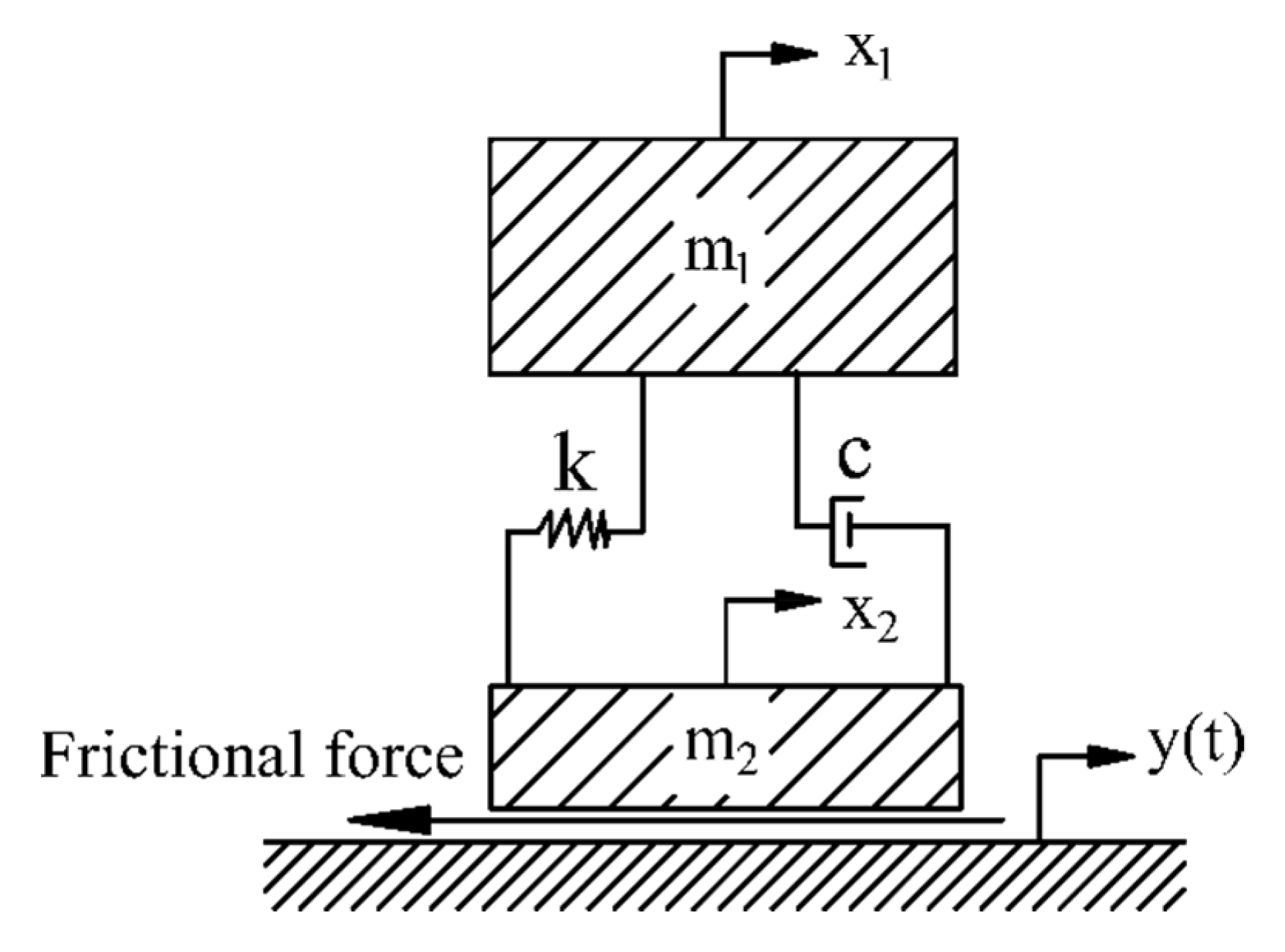{kind=link}
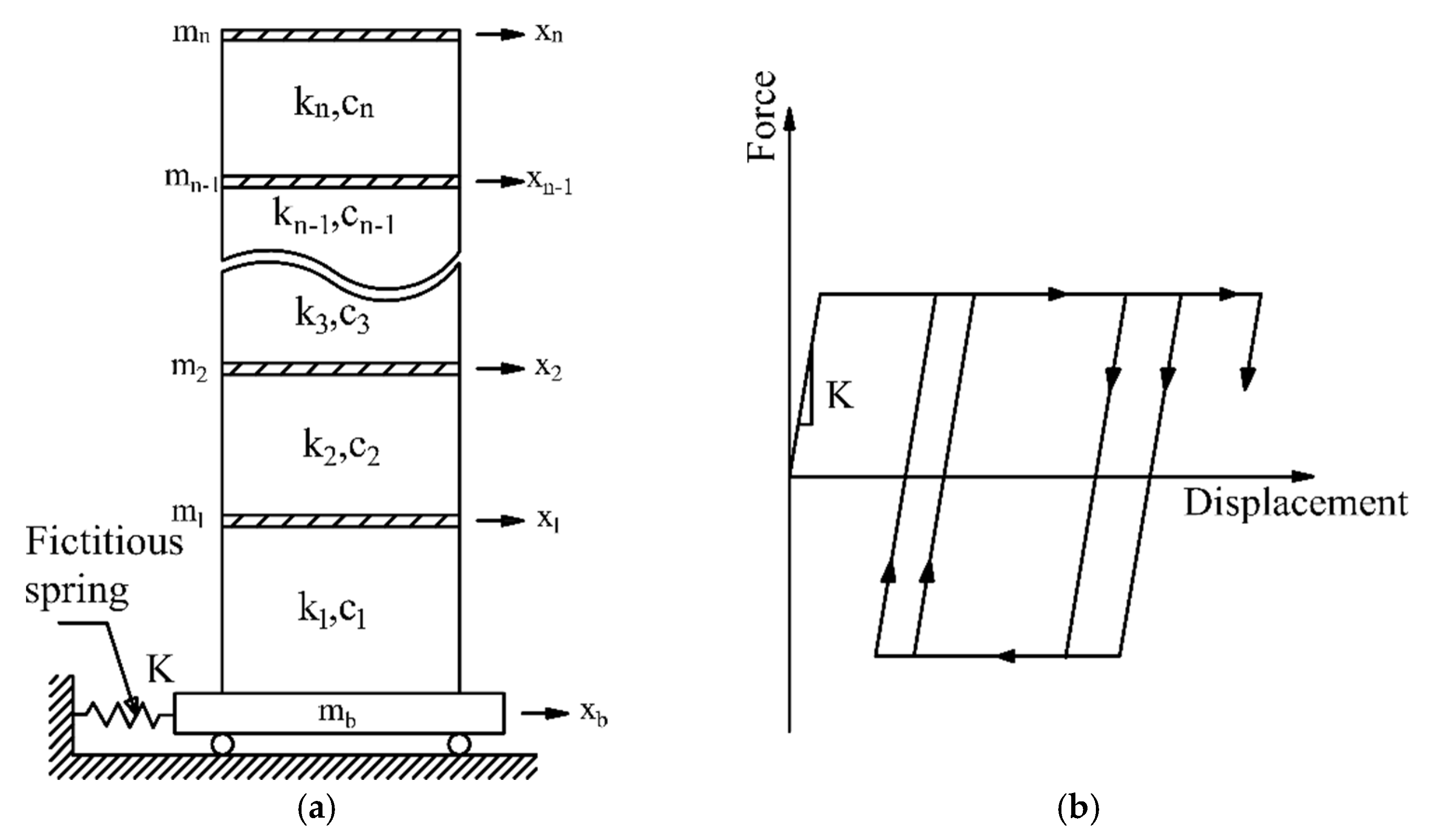{kind=link}
{kind=link}
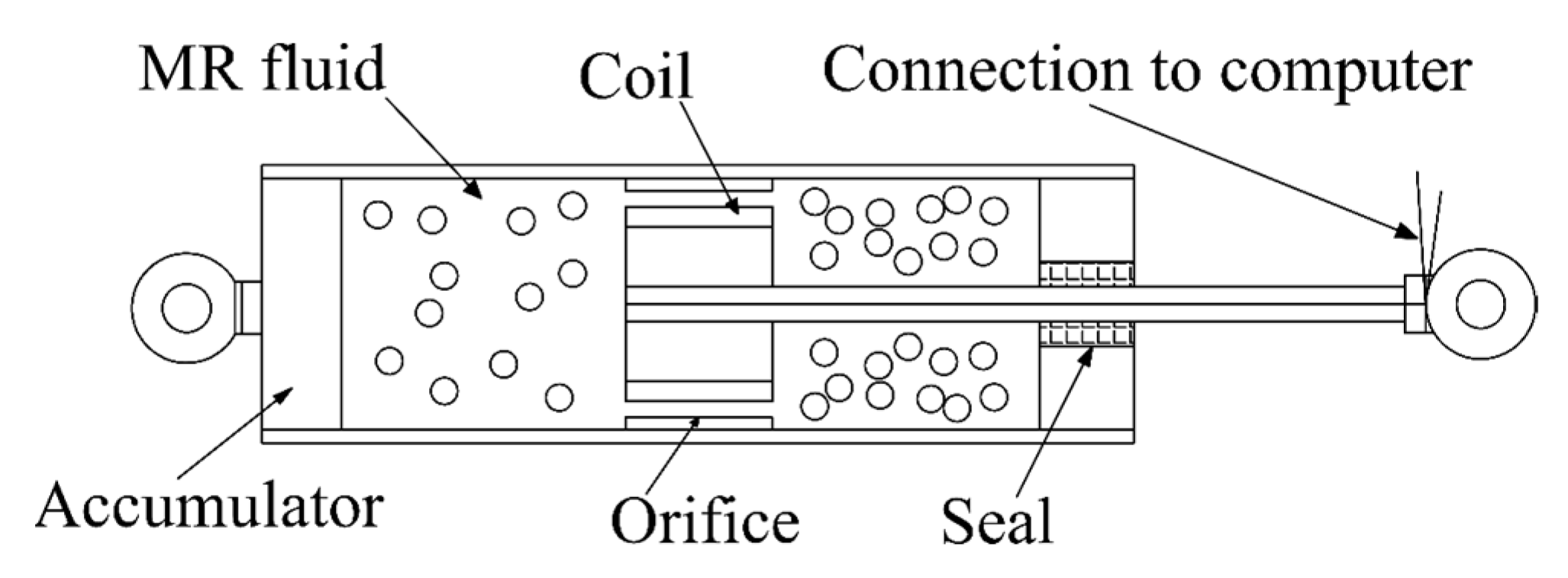{kind=link}
Table 1.
Typical specification for FPS bearings.
| Description | Specifications |
|---|---|
| Thickness of Teflon layer | 1.6 to 2.2 mm [93] |
| Thickness of stainless-steel plate | 1.5 to 2.3 mm [93] |
| Arithmetic average surface roughness | 0.05 to 0.8 µm [93] |
| Stainless steel type | 316 type (ASTM A 240) or type 5 CrNiMo (DIN 17440) [94] |
| Radius of curvature | 1555 to 6045 mm [94] |
| Diameter of concave surface | 356 to 3652 mm [94] |
| Lubricant | Silicone grease, effective at low temperature [94] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Avinash, A.R.; Krishnamoorthy, A.; Kamath, K.; Chaithra, M. Sliding Isolation Systems: Historical Review, Modeling Techniques, and the Contemporary Trends. Buildings 2022, 12, 1997. https://doi.org/10.3390/buildings12111997
AMA Style
Avinash AR, Krishnamoorthy A, Kamath K, Chaithra M. Sliding Isolation Systems: Historical Review, Modeling Techniques, and the Contemporary Trends. Buildings. 2022; 12(11):1997. https://doi.org/10.3390/buildings12111997
Chicago/Turabian StyleAvinash, A. R., A. Krishnamoorthy, Kiran Kamath, and M. Chaithra. 2022. "Sliding Isolation Systems: Historical Review, Modeling Techniques, and the Contemporary Trends" Buildings 12, no. 11: 1997. https://doi.org/10.3390/buildings12111997
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.