
Dynamic Response Analysis of a Thin Plate with Partially Constrained Layer Damping Optimization under Moving Loads for Various Boundary Conditions


Abstract
:1. Introduction
2. Theoretical Formulation
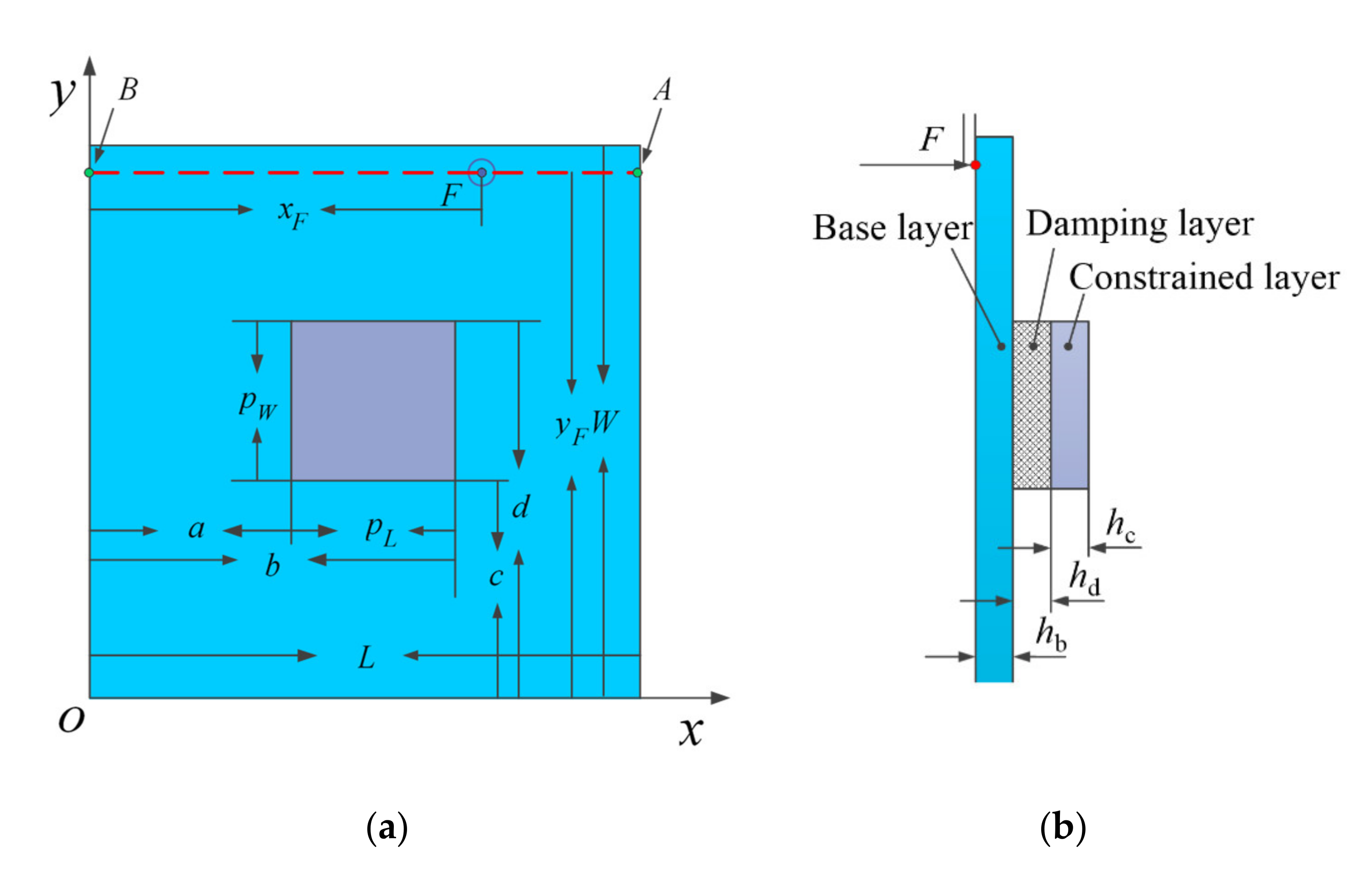
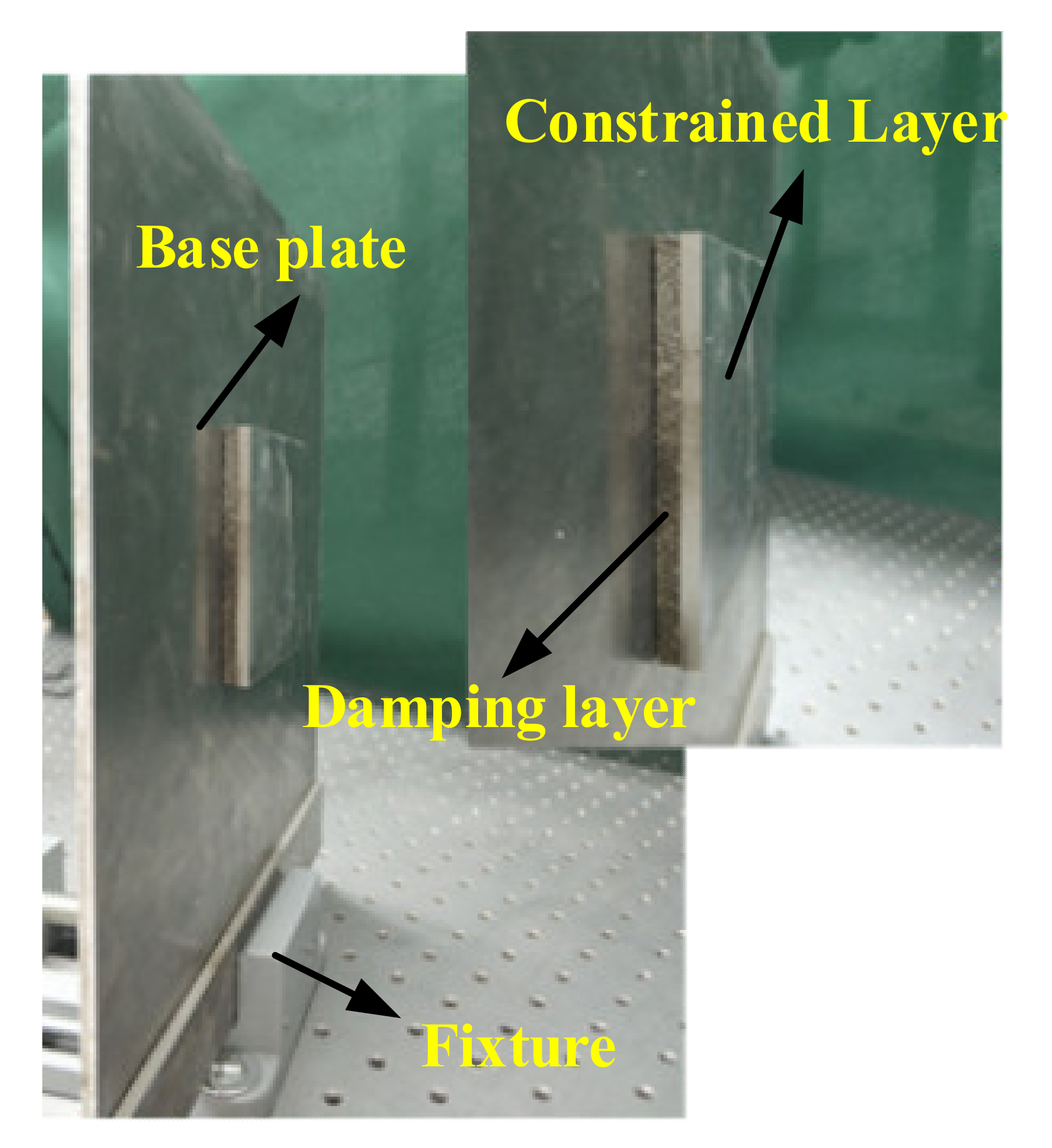
2.1. Model of Partially Covered Plate under Moving Loads
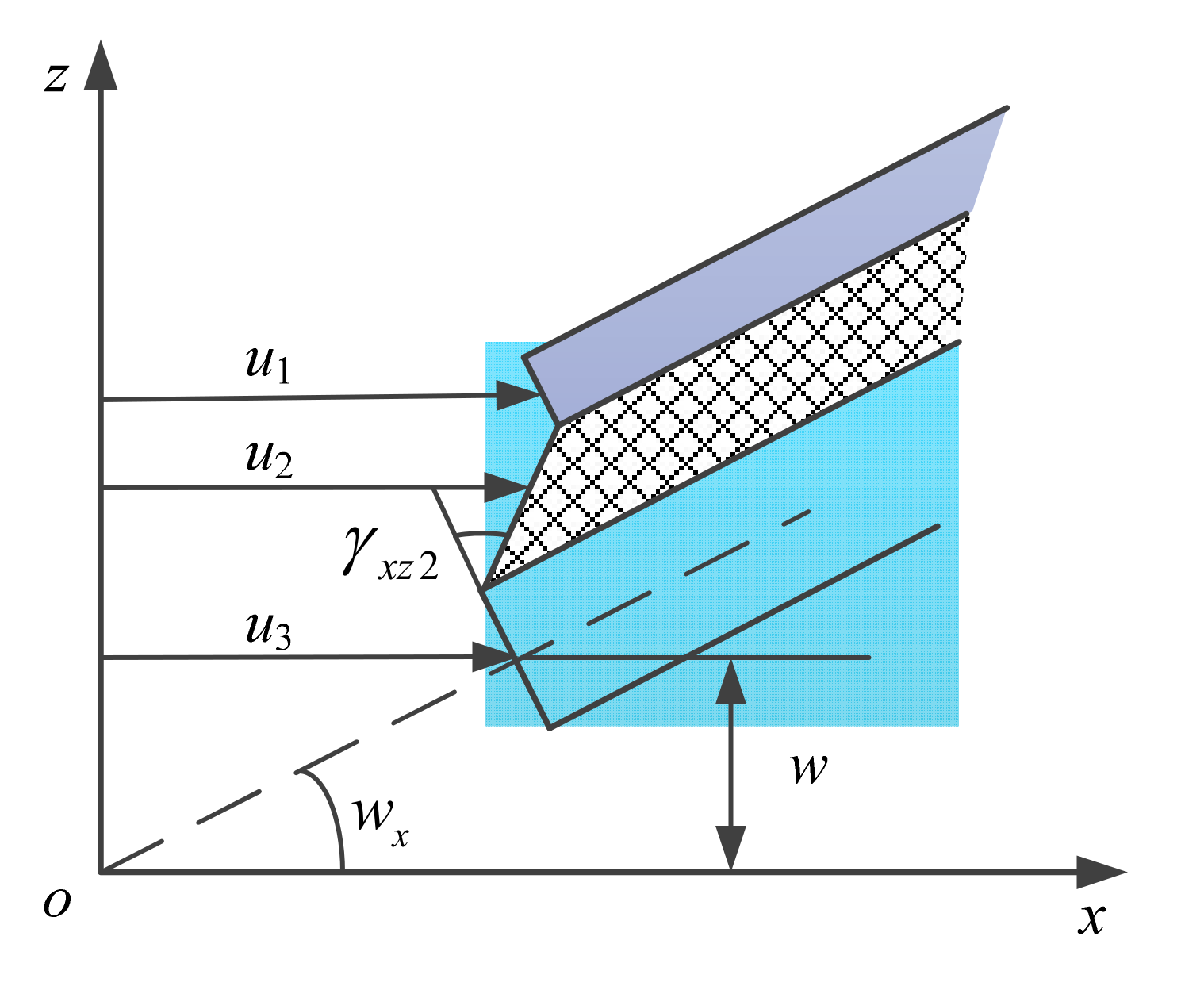
2.2. Governing Equation
2.3. Rayleigh–Ritz Solution and Response
3. Optimization Problem
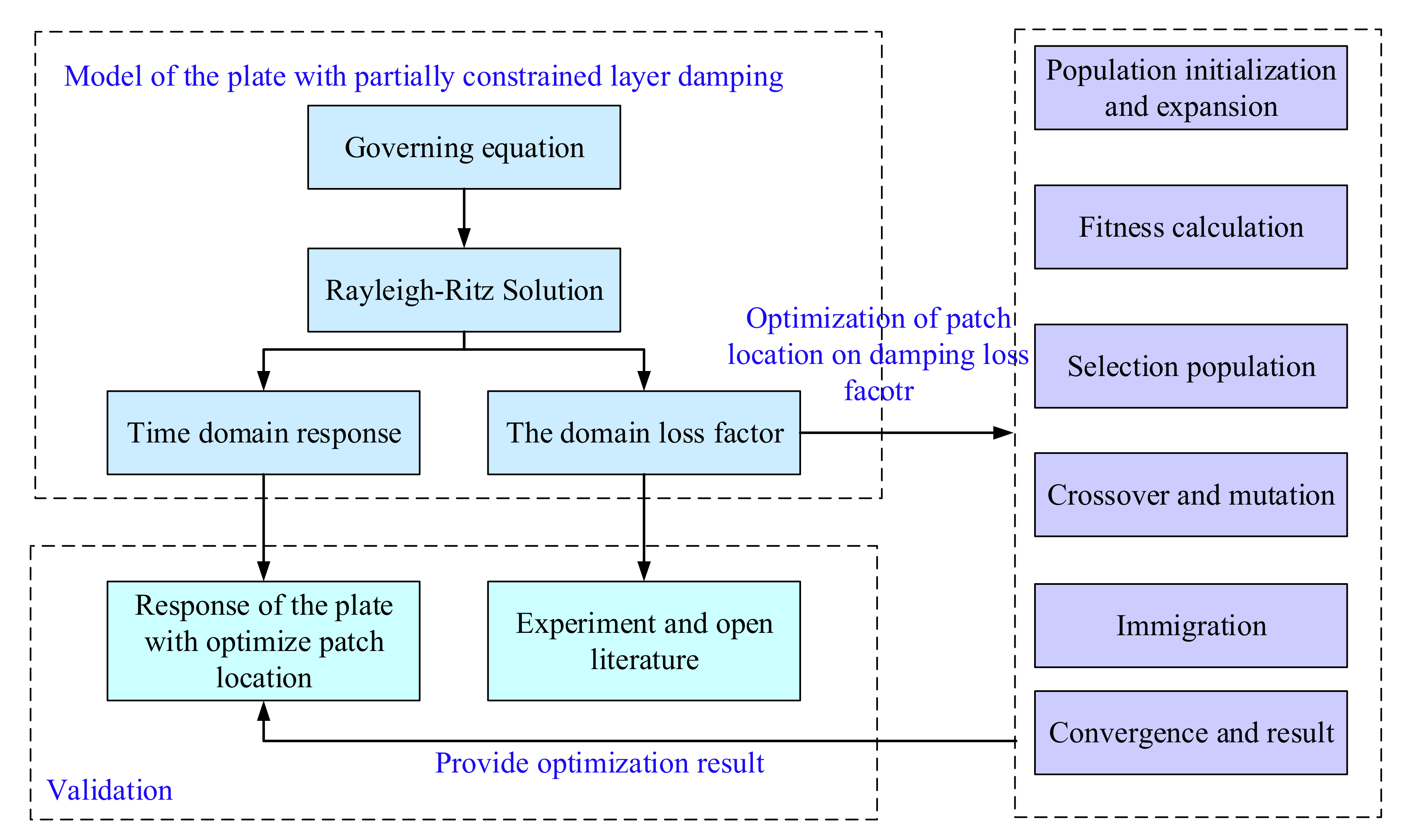
3.1. Optimization Process
3.2. Objective Function
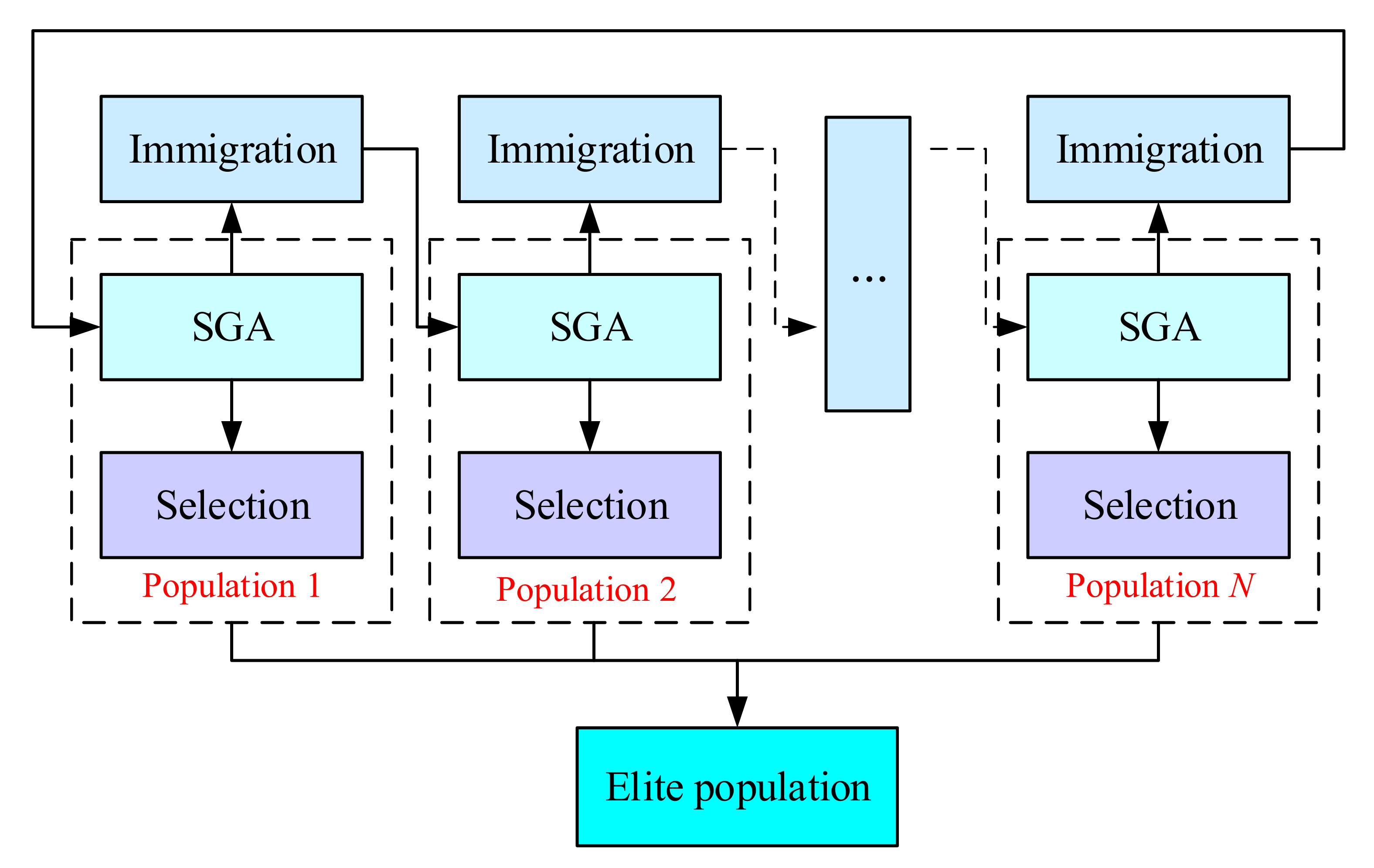
3.3. Solution Methodology
- Population initialization and expansion: N populations are initialized, each of which has a binary chromosome, and the binary chromosome is transformed by the range of values of the x, y variables as shown in Equation (25).
- Fitness calculation: Fitness is applied to distinguish between individuals in a population. In this study, the objective function value is the maximum damping loss factor, so the objective function is employed as the fitness function. The larger the objective function, the greater the fitness and the better the individual.
- Selection: From the old population, good individuals are selected with a certain probability to form a new population to reproduce the next generation of individuals.
- Crossover and mutation: The crossover is the random selection of two individuals from the population to, through the exchange and combination of two chromosomes, produce new, excellent individuals. The mutation is to randomly select an individual from the population and select a point in the individual to mutate to produce a better individual.
- Immigration: The immigration is to replace the worst individual in the target population with the best individual in the original population, so as to achieve the goal of multi-population co-evolution.
- Convergence: MPGA determines the algorithm to terminate based on the elite population. Then, the optimized variables (x, y) and damping loss factor η are obtained.
4. Result Analysis
4.1. Validation
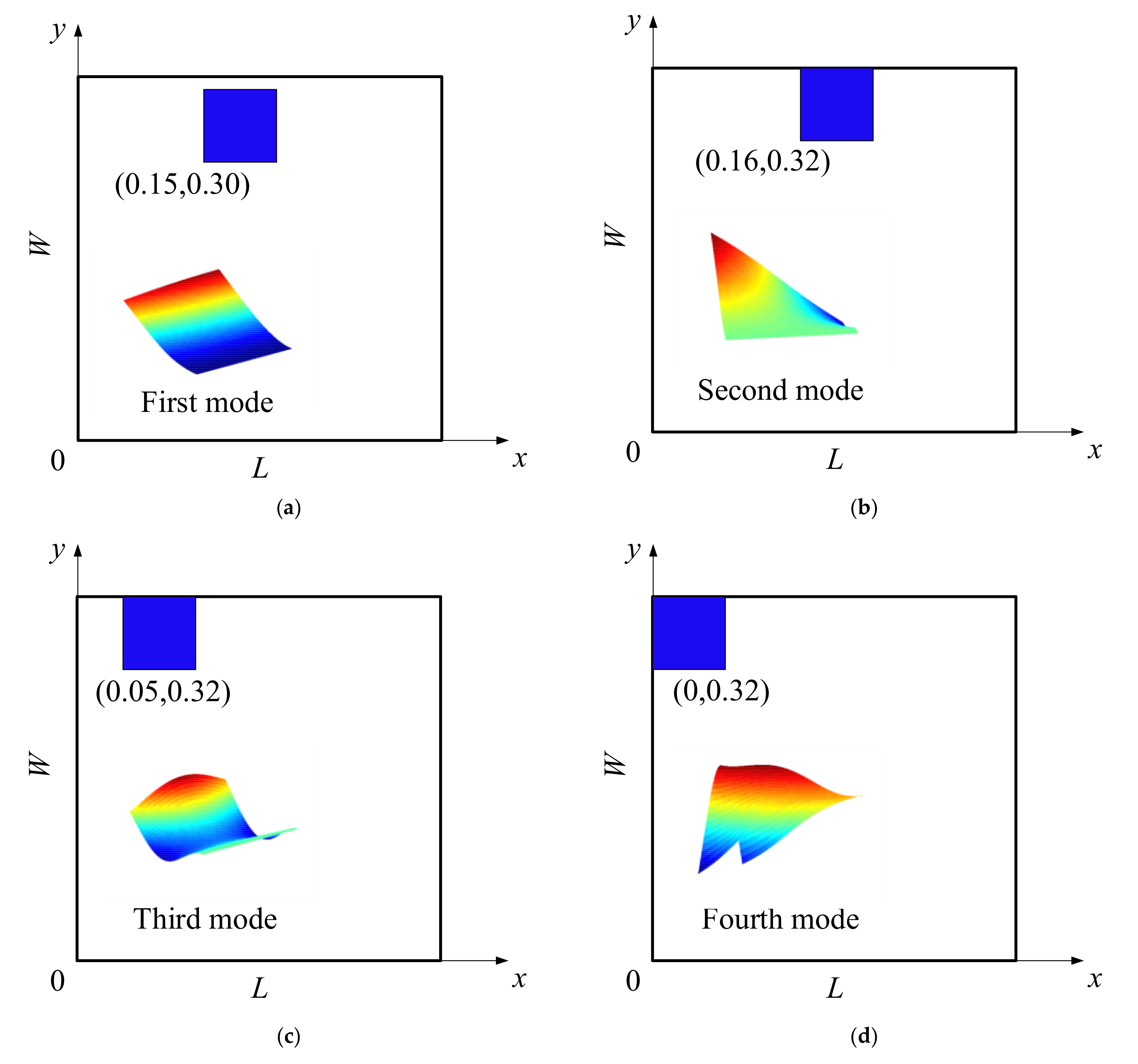
4.2. Optimization of Patch Location on Damping Loss Factor
4.3. Influence of Patch Size on Damping Loss Factor
4.4. Dynamic Response Analysis under Moving Loads
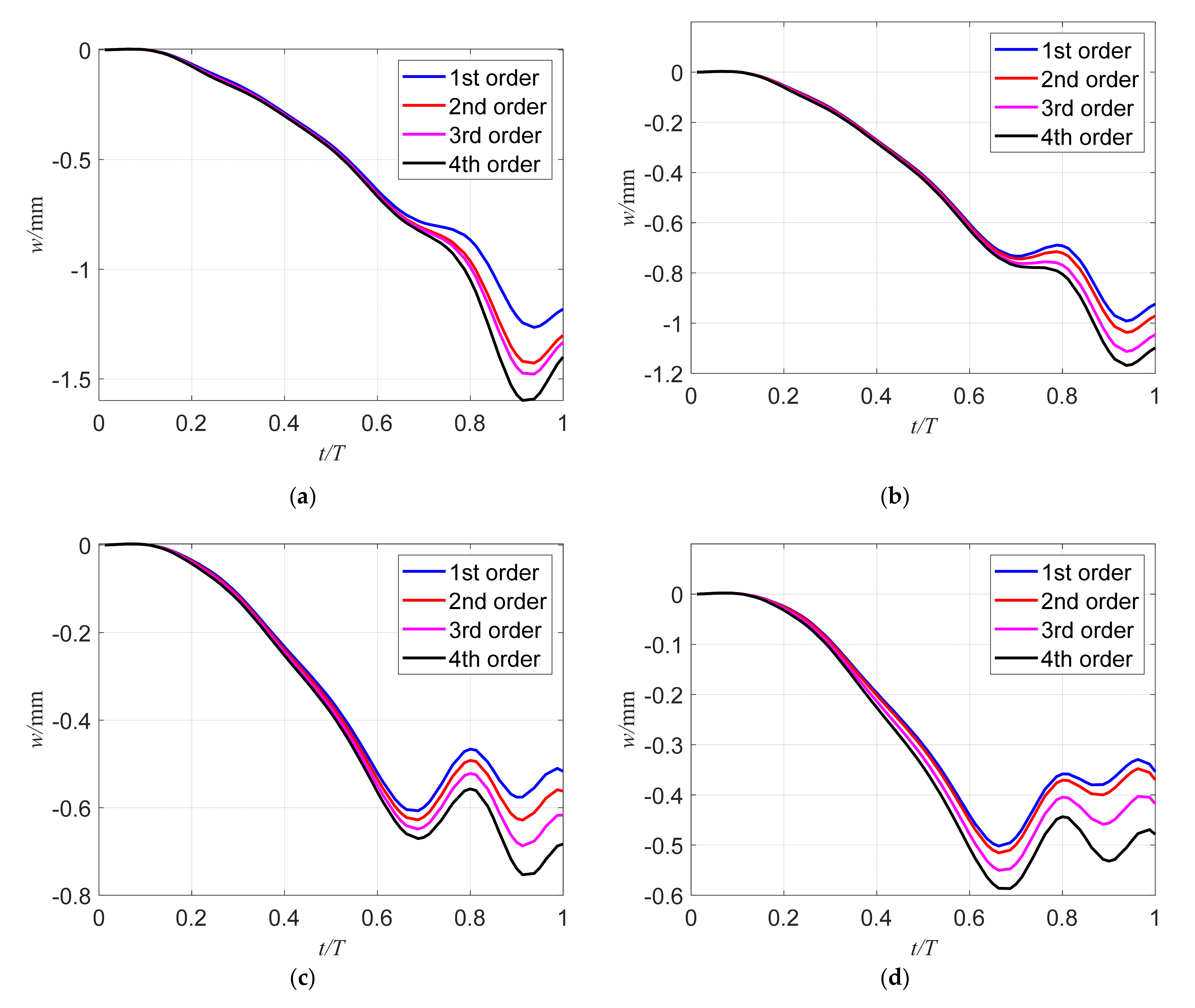
4.4.1. The Influence of Single Order Optimization on Dynamic Response
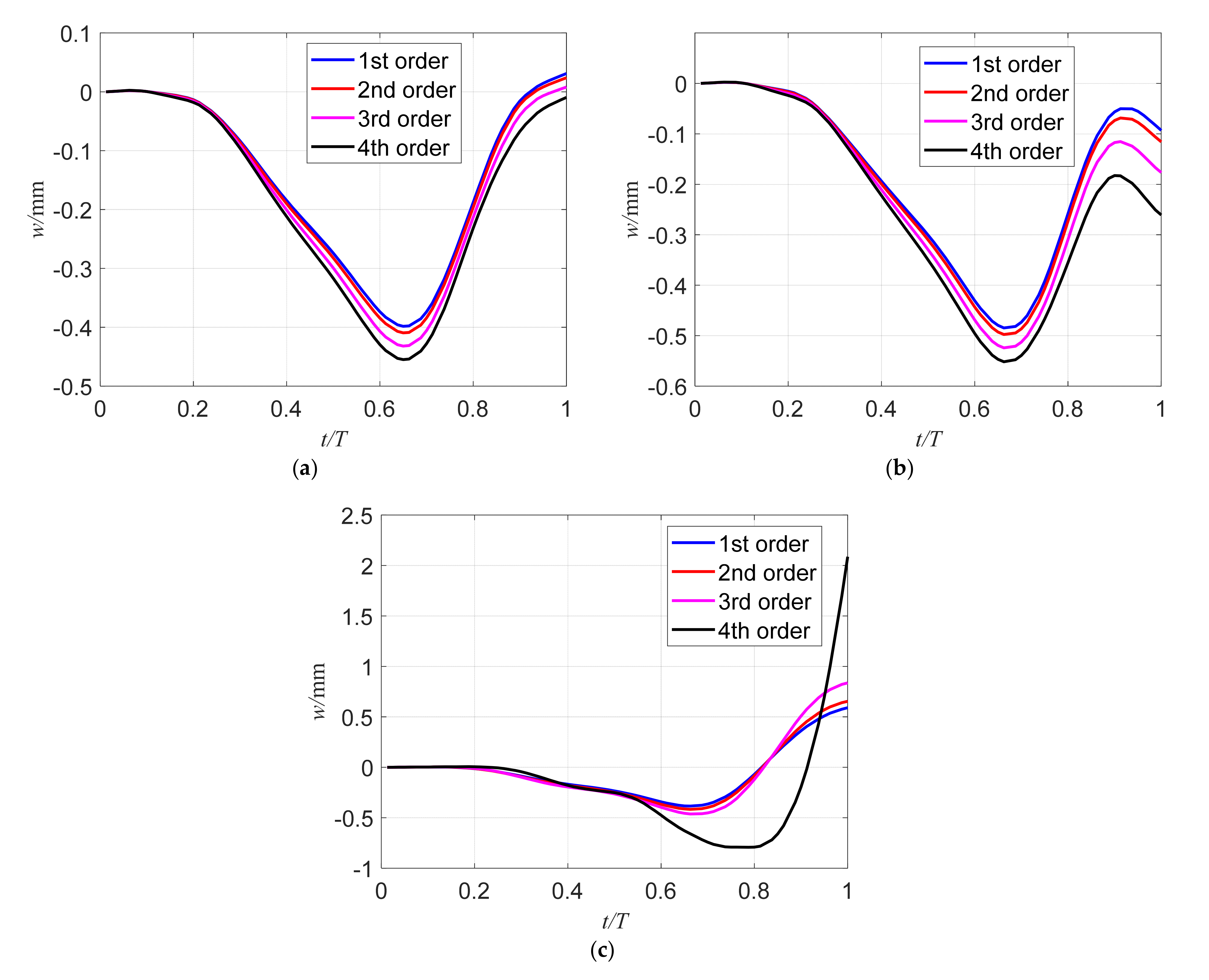
4.4.2. Dynamic Response of the Partially Covered Plate for Various Boundary Conditions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Kerwin, E.M., Jr. Damping of flexural waves by a constrained viscoelastic layer. J. Acoust. Soc. Am. 1959, 31, 952–962. [Google Scholar] [CrossRef]
- Mead, D.J.; Markus, S. The forced vibration of a three-layer, damped sandwich beam with arbitrary boundary conditions. J. Sound Vib. 1969, 10, 163–175. [Google Scholar] [CrossRef]
- Johnson, C.D.; Keinholz, D.A. Finite element prediction of damping in structures with constrained viscoelastic layers. AIAA J. 1982, 20, 1284–1290. [Google Scholar] [CrossRef]
- Lall, A.K.; Asnani, N.T.; Nakra, B.C. Vibration and damping analysis of rectangular plate with partially covered constrained viscoelastic layer. J. Vib. Acoust. Stress Reliab. Des. 1987, 109, 241–247. [Google Scholar] [CrossRef]
- Cupial, P.; Niziol, J. Vibration and damping analysis of a three-layered composite plate with a viscoelastic mid-layer. J. Sound Vib. 1995, 183, 99–114. [Google Scholar] [CrossRef]
- Wang, G.; Veeramani, S.; Wereley, N.M. Analysis of sandwich plates with isotropic face plates and a viscoelastic core. J. Vib. Acoust. 2000, 122, 305–312. [Google Scholar] [CrossRef]
- Banerjee, J.R.; Cheung, C.W.; Morishima, R.; Perera, M.; Njuguna, J. Free vibration of a three-layered sandwich beam using the dynamic stiffness method and experiment. Int. J. Solids Struct. 2007, 44, 7543–7563. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, A.J.M.; Araujo, A.L.; Neves, A.M.A.; Rodrigues, J.D.; Carrera, E.; Cinefra, M.; Soares, C.M.M. A finite element model using a unified formulation for the analysis of viscoelastic sandwich laminates. Compos. Part B Eng. 2013, 45, 1258–1264. [Google Scholar] [CrossRef] [Green Version]
- Khalfi, B.; Ross, A. Transient response of a plate with partial constrained viscoelastic layer damping. Int. J. Mech. Sci. 2013, 68, 304–312. [Google Scholar] [CrossRef]
- Hernandez, W.P.; Castello, D.A.; Ritto, T.G. Uncertainty propagation analysis in laminated structures with viscoelastic core. Comput. Struct. 2016, 164, 23–37. [Google Scholar] [CrossRef]
- Kazeminia, M.; Soleimani-Amiri, S.; Zahedi, S.A. Exact and numerical solutions for nonlinear higher order modified KdV equations by using variational iteration method. Adv. Stud. Theor. Phys. 2010, 4, 437–447. [Google Scholar]
- Fazeli, M.; Zahedi, S.A.; Tolou, N. Explicit Solution of Non-Linear Fourth-Order Parabolic Equations via Homotopy Perturbation Method. J. Appl. Sci. 2008, 8, 2619–2624. [Google Scholar] [CrossRef] [Green Version]
- Kazemnia, M.; Zahedi, S.A.; Vaezi, M.; Tolou, N. Assessment of Modified Variational Iteration Method in BVPs High-Order Differential Equations. J. Appl. Sci. 2008, 8, 4192–4197. [Google Scholar] [CrossRef] [Green Version]
- Zahedi, S.A.; Babitsky, V. Modeling of autoresonant control of a parametrically excited screen machine. J. Sound Vib. 2016, 380, 78–89. [Google Scholar] [CrossRef]
- Mantena, P.R.; Gibson, R.F.; Hwang, S.J. Optimal constrained viscoelastic tape lengths for maximizing dampingin laminated composites. AIAA J. 1991, 29, 1678–1685. [Google Scholar] [CrossRef]
- Marcelin, J.-L.; Trompette, P.; Smati, A. Optimal constrained layer damping with partial coverage. Finite Elem. Anal. Des. 1992, 12, 273–280. [Google Scholar] [CrossRef]
- Ro, J.; Baz, A. Optimum placement and control of active constrained layer damping using modal strain energy approach. Modal Anal. 2002, 8, 861–876. [Google Scholar] [CrossRef]
- Zheng, H.; Cai, C.; Pau, G.S.H.; Liu, G.R. Minimizing vibration response of cylindrical shells through layout optimization of passive constrained layer damping treatments. J. Sound Vib. 2005, 279, 739–756. [Google Scholar] [CrossRef]
- Lepoittevin, G.; Kress, G. Optimization of segmented constrained layer damping with mathematical programming using strain energy analysis and modal data. Mater. Des. 2010, 31, 14–24. [Google Scholar] [CrossRef]
- Zheng, W.; Lei, Y.; Li, S.; Huang, Q. Topology optimization of passive constrained layer damping with partial coverage on plate. Shock Vib. 2013, 20, 199–211. [Google Scholar] [CrossRef]
- Kumar, A.; Panda, S.; Narsaria, V.; Kumar, A. Augmented constrained layer damping in plates through the optimal design of a 0-3 viscoelastic composite layer. J. Vib. Control 2018, 24, 5514–5524. [Google Scholar] [CrossRef]
- Nakra, B.C. Structural dynamic modification using additive damping. Sadhana 2000, 25, 277–289. [Google Scholar] [CrossRef] [Green Version]
- Marcelin, J.-L.; Shakhesi, S.; Pourroy, F. Optimal constrained layer damping of beams: Experimental and numerical studies. Shock Vib. 1995, 2, 445–450. [Google Scholar] [CrossRef]
- Zheng, H.; Cai, C.; Tan, X.M. Optimization of partial constrained layer damping treatment for vibrational energy minimization of vibrating beams. Comput. Struct. 2004, 82, 2493–2507. [Google Scholar] [CrossRef]
- Araújo, A.L.; Mota-soares, C.M.; Mota-soares, C.A.; Herskovits, J. Optimal design and parameter estimation of frequency dependent viscoelastic laminated sandwich composite plates. Compos. Struct. 2010, 92, 2321–2327. [Google Scholar] [CrossRef]
- Hou, S.; Jiao, Y.; Chen, Z. Optimum layout of passive constrained layer damping treatment using genetic algorithms. In Proceedings of the ASME 2010 International Mechanical Engineering Congress and Exposition, Vancouver, BC, Canada, 12–18 November 2010; American Society of Mechanical Engineers: New York, NY, USA, 2010. [Google Scholar]
- Pathan, M.V.; Patsias, S.; Tagarielli, V.L. A real-coded genetic algorithm for optimizing the damping response of composite laminates. Comput. Struct. 2018, 198, 51–60. [Google Scholar] [CrossRef]
- Sun, W.; Liu, R.; Fan, Y. Analytical modeling and damping optimization for a thin plate partially covered with hard coating. Arch. Appl. Mech. 2018, 88, 897–912. [Google Scholar] [CrossRef]
- Gao, F.; Sun, W.; Gao, J. Optimal design of the hard-coating blisk using nonlinear dynamic analysis and multi-objective genetic algorithm. Compos. Struct. 2019, 208, 357–366. [Google Scholar] [CrossRef]
- Frýba, L. Vibration of Solids and Structures under Moving Loads; Springer Science & Business Media: New York, NY, USA, 2013; Volume 1. [Google Scholar]
- Gbadeyan, J.A.; Oni, S.T. Dynamic behaviour of beams and rectangular plates under moving loads. J. Sound Vib. 1995, 182, 677–695. [Google Scholar] [CrossRef]
- Kim, S.-M.; McCullough, B.F. Dynamic response of plate on viscous Winkler foundation to moving loads of varying amplitude. Eng. Struct. 2003, 25, 1179–1188. [Google Scholar] [CrossRef]
- Wu, J.-J. Vibration of a rectangular plate undergoing forces moving along a circular path. Finite Elem. Anal. Des. 2003, 40, 41–60. [Google Scholar] [CrossRef]
- Lee, S.-Y.; Yhim, S.-S. Dynamic analysis of composite plates subjected to multi-moving loads based on a third order theory. Int. J. Solids Struct. 2004, 41, 4457–4472. [Google Scholar] [CrossRef]
- Ghafoori, E.; Asghari, M. Dynamic analysis of laminated composite plates traversed by a moving mass based on a first-order theory. Compos. Struct. 2010, 92, 1865–1876. [Google Scholar] [CrossRef]
- Amiri, J.V.; Ali, N.; Reza, D.M.; Ebrahimzadeh, H.M. Vibration analysis of a Mindlin elastic plate under a moving mass excitation by eigenfunction expansion method. Thin-Walled Struct. 2013, 62, 53–64. [Google Scholar] [CrossRef]
- Esen, I. A new finite element for transverse vibration of rectangular thin plates under a moving mass. Finite Elem. Anal. Des. 2013, 66, 26–35. [Google Scholar] [CrossRef]
- Malekzadeh, P.; Monajjemzadeh, S.M. Dynamic response of functionally graded plates in thermal environment under moving load. Compos. Part B Eng. 2013, 45, 1521–1533. [Google Scholar] [CrossRef]
- Song, Q.; Liu, Z.; Shi, J.; Wan, Y. Parametric study of dynamic response of sandwich plate under moving loads. Thin-Walled Struct. 2018, 123, 82–99. [Google Scholar] [CrossRef]
- Shi, J.; Song, Q.; Liu, Z.; Ai, X. Partial Surface Damper to Suppress Vibration for Thin Walled Plate Milling. Chin. J. Mech. Eng. 2017, 30, 632–643. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Patches Size | Natural Frequencies, rad/s | Loss Factors | ||
|---|---|---|---|---|
| Present Method | Nakra [22] | Present Method | Nakra [22] | |
| PL = 0.15 PW = 0.15 | 930.90 | 930.80 | 0.00304 | 0.00300 |
| PL = 0.39 PW = 0.06 | 952.07 | 952.10 | 0.00784 | 0.00770 |
| Parameters | Base Plate | Damping Layer | Constrained Layer |
|---|---|---|---|
| Length L/m | 0.25 | 0.08 | 0.08 |
| Width W/m | 0.25 | 0.08 | 0.08 |
| Height h/m | 0.004 | 0.004 | 0.004 |
| Density ρ/(g·cm−3) | 2.72 | 0.60 | 2.72 |
| Elasticity modulus /GPa | 69.3 | 12 | 69.3 |
| Poisson ratio μ | 0.33 | 0.33 | 0.33 |
| Loss factor η | / | 0.25 | / |
| Order | Theoretical Calculation (T) | Experiment Result (E) | Error |T−E|/E (%) |
|---|---|---|---|
| 1 | 59.53 | 57.45 | 3.62 |
| 2 | 142.21 | 137.35 | 3.40 |
| 3 | 348.74 | 343.62 | 1.49 |
| 4 | 437.47 | 431.54 | 1.37 |
| Order | Theoretical Calculation (T) (%) | Experiment Result (E) (%) | Error |T-E|/E (%) |
|---|---|---|---|
| 1 | 0.196 | 0.188 | 4.23 |
| 2 | 0.139 | 0.132 | 5.30 |
| 3 | 0.087 | 0.092 | 5.43 |
| 4 | 0.060 | 0.056 | 7.14 |
| Parameters. | Value |
|---|---|
| Number of individuals | 40 |
| Precision of variables | 20 |
| Population size | 10 |
| Cross probability | 0.7 |
| Mutation probability | 0.05 |
| Figure number | 1st Order | 2nd Order | 3rd Order | 4th Order |
|---|---|---|---|---|
| Figure 6a | 0.04077 | 0.02864 | 0.01239 | 0.0011 |
| Figure 6b | 0.04069 | 0.03095 | 0.01353 | 0.0008 |
| Figure 6c | 0.04028 | 0.02753 | 0.01492 | 0.0125 |
| Figure 6d | 0.03946 | 0.02704 | 0.01451 | 0.0169 |
| Boundary | Coordinates of the Patch (x, y) and Loss Factors η | |||
|---|---|---|---|---|
| Condition | 1st Order | 2nd Order | 3rd Order | 4th Order |
| CFCF | (0, 0.066) | (0.32, 0.275) | (0, 0.161) | (0.32, 0.16) |
| 0.00444 | 0.00433 | 0.00618 | 0.00248 | |
| SFSF | (0, 0) | (0, 0) | (0.32, 0.16) | (0, 0.16) |
| 0.01338 | 0.00921 | 0.00780 | 0.00360 | |
| CGSF | (0, 0.32) | (0, 0.32) | (0, 0.176) | (0, 0.160) |
| 0.00971 | 0.00759 | 0.00716 | 0.00335 | |
| Patch Sizes | Coordinates of the Patch (x, y) and Loss Factors η | |||
|---|---|---|---|---|
| 1st Order | 2nd Order | 3rd Order | 4th Order | |
| 0.04 m × 0.04 m | (0.144, 0.352) | (0.182, 0.36) | (0.309, 0.36) | (0, 0.36) |
| 0.01211 | 0.00969 | 0.00446 | 0.00576 | |
| 0.16 m × 0.16 m | (0.118, 0.217) | (0.12, 0.24) | (0.24, 0.24) | (0, 0.24) |
| 0.10625 | 0.07922 | 0.03744 | 0.03131 | |
| 0.04 m × 0.16 m | (0.181, 0.24) | (0.212, 0.24) | (0.36, 0.24) | (0, 0.24) |
| 0.04053 | 0.02566 | 0.01186 | 0.01455 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Song, Q.; Liu, Z.; Shi, J. Dynamic Response Analysis of a Thin Plate with Partially Constrained Layer Damping Optimization under Moving Loads for Various Boundary Conditions. Appl. Sci. 2021, 11, 3282. https://doi.org/10.3390/app11073282
Qin Y, Song Q, Liu Z, Shi J. Dynamic Response Analysis of a Thin Plate with Partially Constrained Layer Damping Optimization under Moving Loads for Various Boundary Conditions. Applied Sciences. 2021; 11(7):3282. https://doi.org/10.3390/app11073282
Chicago/Turabian StyleQin, Yun, Qinghua Song, Zhanqiang Liu, and Jiahao Shi. 2021. "Dynamic Response Analysis of a Thin Plate with Partially Constrained Layer Damping Optimization under Moving Loads for Various Boundary Conditions" Applied Sciences 11, no. 7: 3282. https://doi.org/10.3390/app11073282