Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects
by
 , , and
, , and
Vasileios Moysiadis
1, 
Naoum Tsolakis
1,2 ,
,
Dimitris Katikaridis
1,
Claus G. Sørensen
3 ,
,
Simon Pearson
4 and
and
Dionysis Bochtis
1,* 1
Institute for Bio-Economy and Agri-Technology (iBO), Center for Research and Technology—Hellas (CERTH), 57001 Thessaloniki, Greece
2
Centre for International Manufacturing, Institute for Manufacturing (IfM), Department of Engineering, School of Technology, University of Cambridge, Cambridge CB3 0FS, UK
3
Department of Engineering, Aarhus University, DK-8000 Aarhus C, Denmark
4
Lincoln Institute for Agri-Food Technology (LIAT), University of Lincoln, Lincoln LN6 7TS, UK
*
Author to whom correspondence should be addressed.
Appl. Sci. 2020, 10(10), 3453; https://doi.org/10.3390/app10103453
Submission received: 20 February 2020
/
Revised: 30 April 2020
/
Accepted: 7 May 2020
/
Published: 17 May 2020
(This article belongs to the Special Issue Applied Agri-Technologies)
Abstract
:The advent of mobile robots in agriculture has signaled a digital transformation with new automation technologies optimize a range of labor-intensive, resources-demanding, and time-consuming agri-field operations. To that end a generally accepted technical lexicon for mobile robots is lacking as pertinent terms are often used interchangeably. This creates confusion among research and practice stakeholders. In addition, a consistent definition of planning attributes in automated agricultural operations is still missing as relevant research is sparse. In this regard, a “narrative” review was adopted (1) to provide the basic terminology over technical aspects of mobile robots used in autonomous operations and (2) assess fundamental planning aspects of mobile robots in agricultural environments. Based on the synthesized evidence from extant studies, seven planning attributes have been included: (i) high-level control-specific attributes, which include reasoning architecture, the world model, and planning level, (ii) operation-specific attributes, which include locomotion–task connection and capacity constraints, and (iii) physical robot-specific attributes, which include vehicle configuration and vehicle kinematics.
1. Introduction
In the era of Industry 4.0, digitalization of industrial processes and services has been advanced by three key technologies [1]; the Internet of Things (IoT) (e.g., connectivity); additive manufacturing (e.g., 3D printing) and advanced robotics. In particular, the application of robotic systems extend, in principle, from structured industrial environments to semi-structured and even unstructured operational settings [2]. Indicative cases of application include: healthcare operations [3] urban mobility [4]; and precision agriculture [5]. Automating operations in these environments requires technologically advanced robotic systems for performing four main operations [6]: (i) perception; (ii) localization; (iii) planning; and (iv) execution. Similarly, mobile robots, i.e., Unmanned Ground Vehicles (UGVs) and Unmanned Aerial Vehicles (UAVs), are being applied in agriculture for automating a range of labor-intensive, resources-demanding and time-consuming operations. In this regard, planning mobile robots in agriculture is essential within the Operations Research community [7], specifically for resolving constraints of farm input resources, robot maneuverability, agri-field topology, and time windows imposed by the specifications of crops/fresh produce.
The extant literature on mobile robots is proliferated by studies which focus on an extensive range of hardware and possible technological options solutions like locomotion systems [8] sensing equipment [9], spatial positioning systems and steering control mechanisms [10]. However, the need for planning mobile robots in agricultural environments, i.e., converting mission specifications as defined by a user into high-level descriptions of how to execute the physical mission subject to defined performance criteria, is also critical and challenging due to:
- (i)
- the presence of biological entities governed by temporal changes in their properties (the product itself-i.e., the crop-throughout its life continuously changes in terms of physical-e.g., size and shape-and chemical properties-e.g., color and nutrients)
- (ii)
- the nature of agricultural environments as operational environments are typically non-static, non-certain in terms of robot awareness, and not defined a priori; and
- (iii)
- the technological and functional constraints of mobile robots.
In addition, a major challenge that needs resolution through optimal planning is the limited flight autonomy of UAVs. This hinders the potential for remote sensing and field mapping on a single route [11,12]. Ensuring safety in remote sensing missions requires careful design of the UAV trajectory in terms of visiting waypoints, flight speed and altitude, flying directions, flexible real-time mission management capacity to minimize the number of changes in trajectory and imagery overlaps, and take-off and landing requirements.
Despite the need for planning automated operations in agricultural environments, a generally accepted technical lexicon over mobile robots is lacking as pertinent terms are often used interchangeably. In addition, consistent definition of planning attributes in automated agricultural operations is missing as relevant research is sparse. Therefore, the need to define mobile robots-centric technical aspects and planning should lay the foundation to resolve key research questions (RQs):
- RQ#1-What is a basic and concise terminology required for planning mobile robotic autonomous operations?
- RQ#2-What attributes have to be included to enable a comprehensive locomotion panning in autonomous operations within agri-environments?
The objective of this study is to review and address these RQs. Specifically, we adopt a “narrative” review approach to provide, as a first step, the basic terminology to describe mobile robotic applications used within field autonomous operations. As a second step, we aim to provide fundamentals planning aspects of mobile robots in agri-field environments. Ultimately these will shape current research, identify knowledge gaps and recommend future directions.
2. Materials and Methods
As this research aims to articulate a concise basic lexicon on a topic with pragmatic ramifications, the object of scrutiny is a synthesis of existing works in the literature [13]. The basic theoretical lens, the definitions and decomposition of the planning attributes, and the methodological approach relevant to this research are analyzed in the sub-sections below.
2.1. Theoretical Lens
Mobile robots are expected to operate autonomously in real-world and dynamically changing agricultural environments, hence necessitating the integration of effective control and navigation systems to support localization, path planning, and path execution capabilities [14]. From an academic point of view, as the principles of control systems engineering underpin the actions of mobile robots, this research adopts the control theory respective. According to Sontag [15], control theory is fundamentally the sub-field of “application-oriented mathematics that deals with the basic principles underlying the analysis and design of control systems”.
Control theory is used to mathematically express and analyze the structure of the planning problems under consideration, e.g., trajectory planning, and to generate an analytical solution [16]. Nonetheless, providing mathematical expressions for the identified and consolidated planning types for mobile robots in agriculture extends the scope of this research.
2.2. Definition of Planning Atributes
Considering that the focus of this research is the planning of mobile robots in agricultural operations, in this sub-section, we primarily present the principles of mobile robots, and then we define and decompose the planning attributes encountered in an agricultural operations setting.
Generally, mobile robot systems are recognized as “physical agents that move and interact continuously while embedded in a dynamic environment” [17]. Contrary to existing robotic systems which are largely fixed and heavy installations used for performing repetitive tasks, autonomous mobile robots consist a more flexible and cost-effective technology for executing sophisticated tasks without manual observation/operation. Advanced UGV and UAV systems that utilize sensors and cameras to self-localize and navigate their working environments are typically recognized as mobile robots. In an agricultural setting, UGVs are autonomous vehicles that navigate within an agri-field for soil and imagery aggregation, harvesting, spraying, weeding, etc. [18,19]. Additionally, UAVs are used to mainly address area coverage tasks (usually referred as “mosaicking”) with regard to the acquisition of geo-referenced aerial imagery, weed detection (high-resolution monitoring) and hydric stress determination (low-resolution monitoring).
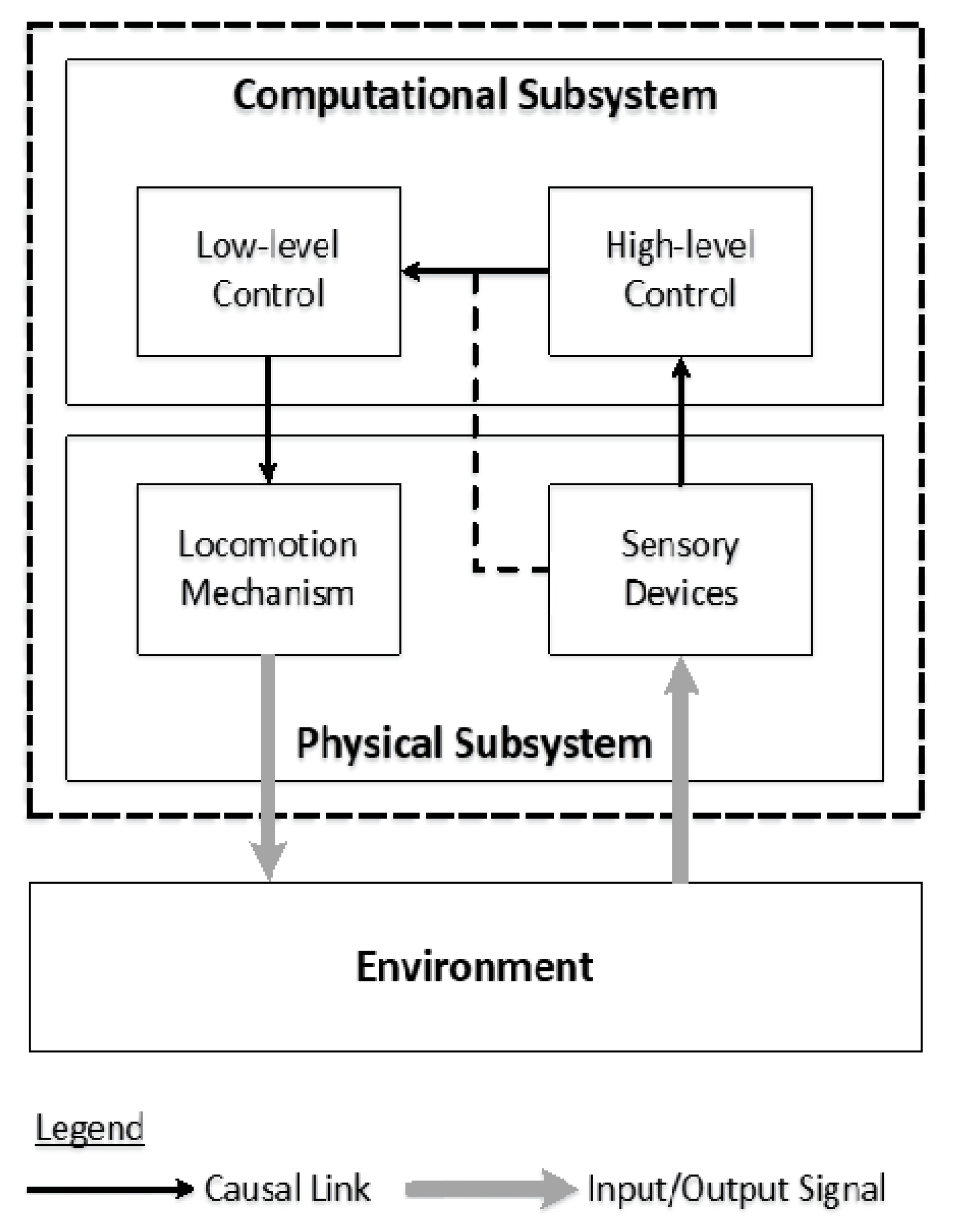
The interaction element within certain environments is eminent so that mobile robots “accomplish various tasks such as visual navigation, obstacle avoidance, and landmark (and/or object) recognition” [20]. A mobile robot typically comprises of two sub-systems (Figure 1), namely:
- 1.
- The physical sub-system that includes the locomotion mechanism, which enables the motion-transition of the robot between two subsequent configurations, along with the sensory devices, which enable interaction with the operating environment At the physical subsystem level, the locomotion mechanism includes physical steering systems (in the case of UGVs) or piloting systems (in the case of UAVs), the necessary control mechanisms and the underpinning kinematics;
- 2.
- The computational sub-system that includes the low- and high-level control layers and refers to all algorithms and models controlling the functionality and maneuverability of the robot.
In this work, we use the term “locomotion planning” to encapsulate the terms “motion planning”, “route planning”, and “path planning” that are typically used interchangeably in the literature related to automated operations enabled by robotics. A general differentiation between these terms can be based on the level of abstraction of the solution domain. The term “motion planning” refers to generating efficient trajectories for mobile robot systems, particularly in problems that involve kinematic constraints, dynamic constraints, object coordination, etc. Furthermore, the term “route planning” refers to calculating the optimal sequence (permutation) for visiting the nodes in a graph, from a topological perspective, and is equivalent to the problem of the complete traversal of a graph (in the same sense that the term is used in the family of vehicle routing optimization problems) [21,22]. Conversely, “path planning” refers to the problem of determining a collision-free path, either in a topological or geometrical or trajectory sense, connecting a pre-given start and a goal point [23].
In the following sections, locomotion planning attributes encountered in an agricultural operations setting are defined and decomposed.
2.2.1 Reasoning Architecture
The autonomous and intelligent operation of mobile robots requires context-aware adaptation to the particular conditions of each operating environment. Therefore, two distinct reasoning architectures (or control paradigms) which dictate the intelligent behavior of mobile robots are identified [17], namely: (i) deliberative reasoning; and (ii) reactive reasoning. Models that combine elements of both deliberative and reactive behavior comprise hybrid architectures [24].
In the case of deliberative reasoning the robot actions are planned based on an off-line generated word map. The basic assumption under this reasoning architecture is that past and current knowledge is used for predicting the potential outcome of a robot’s action [25]. In deliberative reasoning the world is defined based on incomplete information leading to uncertainty about the possible actions of a robot thus resulting in reduced system robustness. Despite the uncertainty at a spatial level, time-specific uncertainty is also prevalent due to a time gap between a priori representation and the actual world. The significance of time gaps is greater in outdoor agricultural production environments owing to the variability of time, weather conditions, ongoing evolvement of biological entities (e.g., trees, crops), etc. Except for the effect of time gaps, the reasoning process associates to high computational costs, hence generating an additional gap between reasoning and decision execution. In the reactive control paradigm, a synthesis of environment perception and robot action dictates the behavior pattern of the system behavior [17]. Practically, changes to the environment are captured through sensors, and the actuators translate the received signals to real-time response. Reactive architectures can complement a mobile robot’s control system for critical tasks, in real-time, like obstacle avoidance.
Both robot control reasoning architectures have drawbacks; however, combining and balancing these paradigms can ensure the efficient execution of the assigned tasks. The usual practice is the combination of a high-level deliberative behavior for the operation’s tasks and a low-level reactive behavior for the real-time critical tasks mainly related to safety of the robot and the operating environment (including the human factor).
2.2.2. World Model
Word maps refer to the internal representation of the operating space by a mobile robot [26]. In this context, workspace representations refer either to the use of a pre-generated map (along with the characteristics of any involved entities) or the creation of a new map. Research in the field of mobile robots recognizes three (3) types of world maps, namely: (i) metric maps; (ii) topological maps; and (iii) semantic maps.
In a metric map, the world representation regards the configuration of the environment and the location of any entities that affect robot self-localization. To that end, either Cartesian or grid-based world models are applied. Cartesian models consist of discrete geometric primitives such as points, lines, or polynomial functions. These primitives are connected either with a local or a global two-dimensional or tree-dimensional coordinate system [20,27]. In grid-based models the workspace is decomposed into an evenly-spaced grid and each entity corresponds to a region within the environment [28].
Moreover, topological maps use graphs to represent world environments [29], thus allowing the execution of navigation tasks. Specifically, the nodes of a graph represent locations, obstacles or landmarks (such as doorways). In addition, arcs connect the nodes in case a direct relation exists between them; the arcs denote a “calibrated” parameter that represents the cost (e.g., distance) for the safe transition of a mobile robot between nodes.
Finally, the need for robots to execute high-level tasks in human-involved environments motivated the introduction of semantic maps in the related technical literature [30]. Specifically, semantic maps use meta-information to provide robots with a range of inference capabilities for efficient navigation, object detection, human-robot interaction, etc.
2.2.3. Locomotion–Task Connection
Locomotion capabilities are a major prerequisite for mobile robots as these enable the execution of handling tasks at distributed workstations. Indicatively, the most common locomotion systems include wheels, mechanical legs, tracks, propellers, and other external devices which enable the interaction with the operating environment [31].
Furthermore, the tasks which need to be executed by mobile robots in agriculture might be:
- Implicitly connected with the robot’s locomotion, i.e., the robot uses its mobility function in order to reach a set of distributed workstations to perform any required tasks. In this case, the way that the robot navigates is irrelevant to the task per se.
- Explicitly connected with the robot’s locomotion, i.e., the task is executed “on-the-go”. Notably, the way that the robot is moving affects the execution of the task.
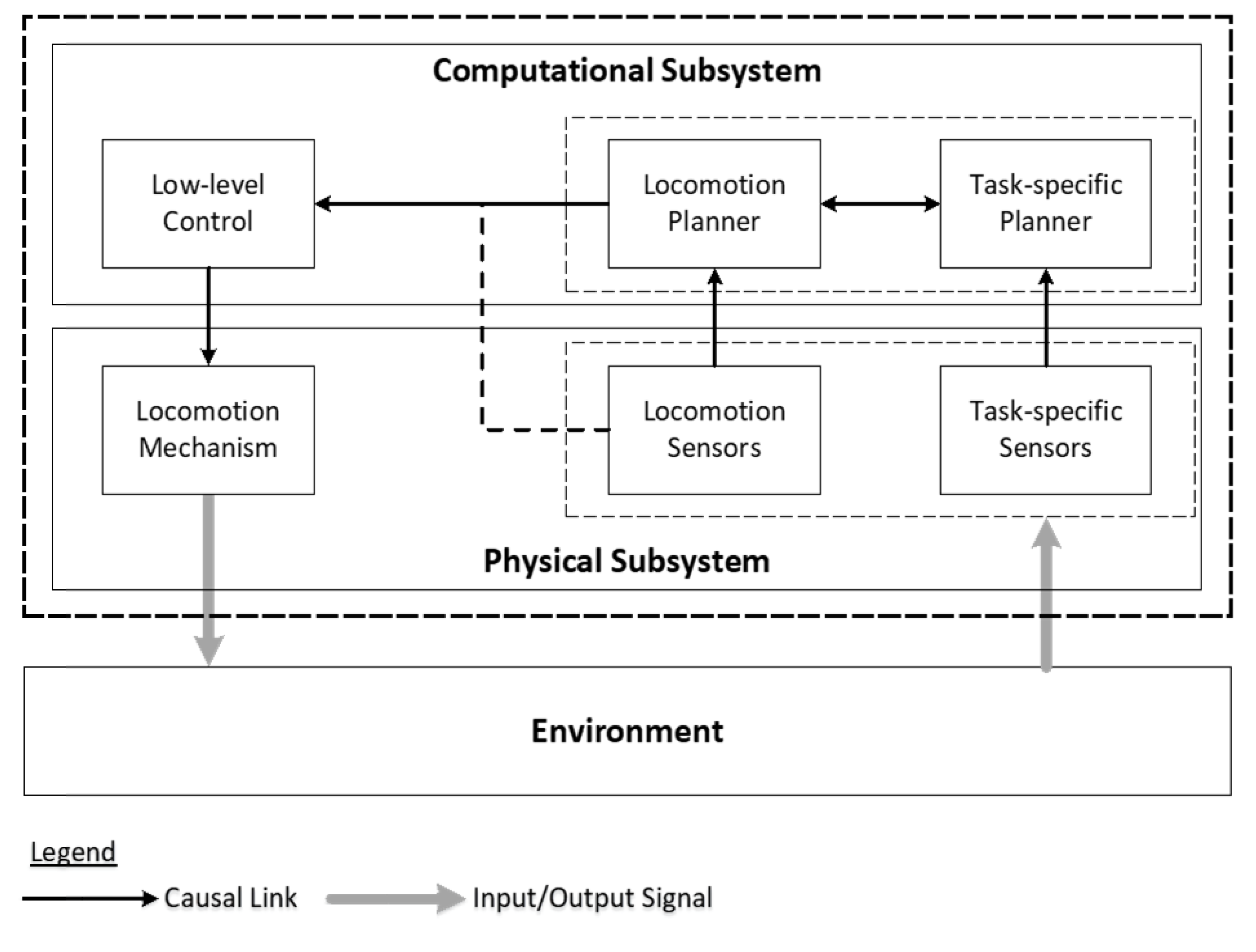
In the case of implicit connection between locomotion and task, the general architecture of mobile robot systems is depicted in Figure 2. For example, a mobile robot equipped with a harvesting arm that navigates across an orchard to pick fruits or to monitor the status of the field classifies as a case of implicit connection between locomotion and task.
On the contrary, for the case of explicit connection between locomotion and task, the architecture of the robotic system is the general one presented previously as depicted in Figure 1. For instance, a mobile robot that executes area coverage operations, like spraying or seedbed preparation, is a case of explicit connection between locomotion and task.
2.2.4. Planning Level
In robotics literature, the differentiation between global and local path planning relates to the operations environment and the predefined goals [32]. Firstly, global planning refers to the provision of a complete plan for the operations to be performed; the operations could be either deterministic or stochastic, depending on the availability of a priori information [33]. Secondly, local path planning refers to the real-time generation of an operational plan based on the data collected during navigation and the changes in the workspace [32].
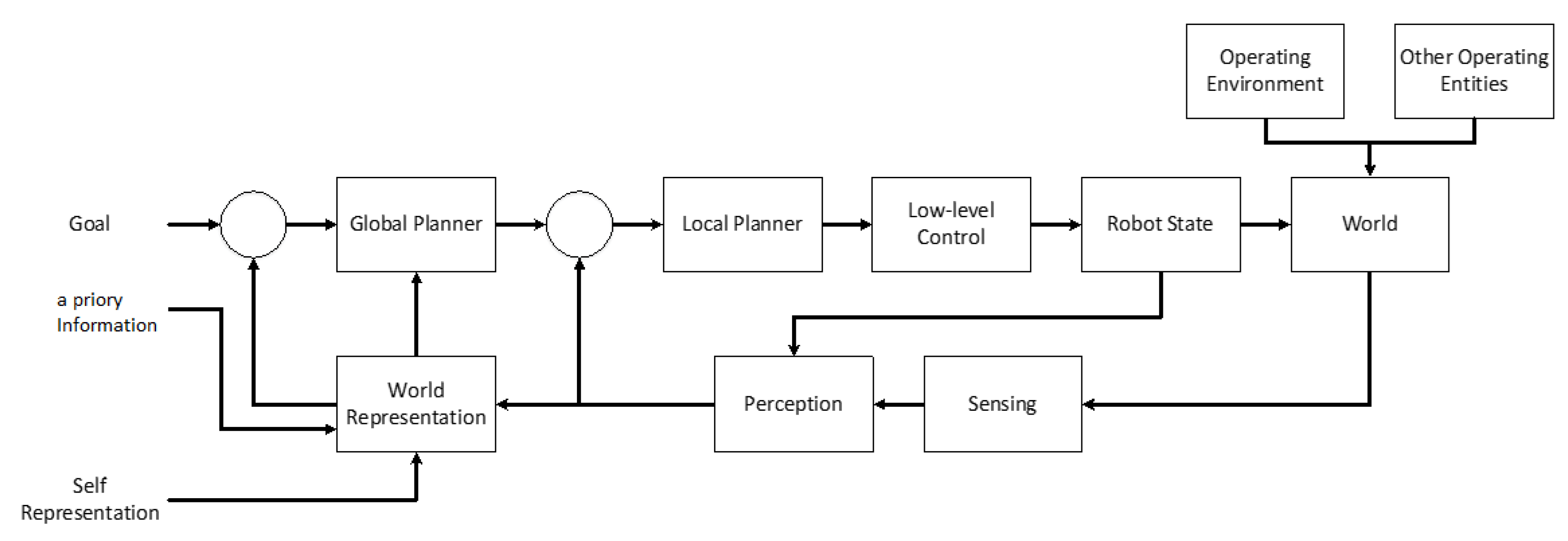
Usually, local planning is implemented in combination with a global path planner for tasks such as obstacle avoidance or headland turnings and is mainly based on reactive control processes. For example, a global planner provides the track sequencing and the paths in area coverage operations, while a local planner activates in the presence of any obstacles on the mobile robot’s path. Figure 3 provides the general architecture of a robotic system. This architecture varies among systems and must be adapted to each specific case in terms of activation of local and global planning constituents along with their relative contribution to the overall planning for the robotic system.
2.2.5. Capacity Constraints
From an agronomic point of view, a capacity constraint is valid in operations where either an input (e.g., fertilizing) or an output (e.g., harvesting) material flow is involved [22,34]. In this regard, capacitated agricultural operations imply that the involved tasks cannot be completed on a single route of the agricultural vehicle (meaning that the vehicle has to interrupt the operation for refiling—e.g., fertilizing—or unloading—e.g., harvesting).
From an optimization process point of view, the term “capacitated” is more general and refers to the presence of capacity constraints in the optimization problem of planning in order to include capacity constraints beyond the ones directly stemming from material flow. For example, in a UAV monitoring operation, which does not involve any material flow, the operation can be still characterized as “capacitated” since the drone needs to interrupt the operation for recharging reasons.
2.2.6. Vehicle Configuration
This attribute simply regards the operation of a single mobile robot or the synergetic cooperation of multiple robots.
2.2.7. Vehicle Kinematics
From a locomotion planning point of view, two general types of vehicle kinematics can be distinguished, kinematics that are governed by holonomic constraints (e.g., omnidirectional driving) and kinematics that are governed by non-holonomic constraints (e.g., car-like driving).
2.3. Methodological Approach
This research applied the ‘traditional narrative’ review approach to analyze the extant literature pertinent to planning aspects of mobile robots in agriculture, while aiming to provide insights in the field [35]. In particular, the ‘traditional narrative’ review approach involves informal mechanisms to organize and analyze the existing literature in a field [36]. To that end, a small number of articles in peer-reviewed scientific journals were selected which helped to identify key authors and other relevant studies to the particular topic of planning agricultural robotics. The selection of the ‘traditional review’ approach, instead of a more systematic review, was motivated by the intention to close the gap on fundamental knowledge in the field of agricultural robotics planning which currently lacks any concise and formal definitions beyond scattered and random empirical knowledge [37]. Instead, we attempted to identify a set of papers that investigate planning aspects of mobile robots (both UGVs and UAVs) in main agricultural operations to gain insights.
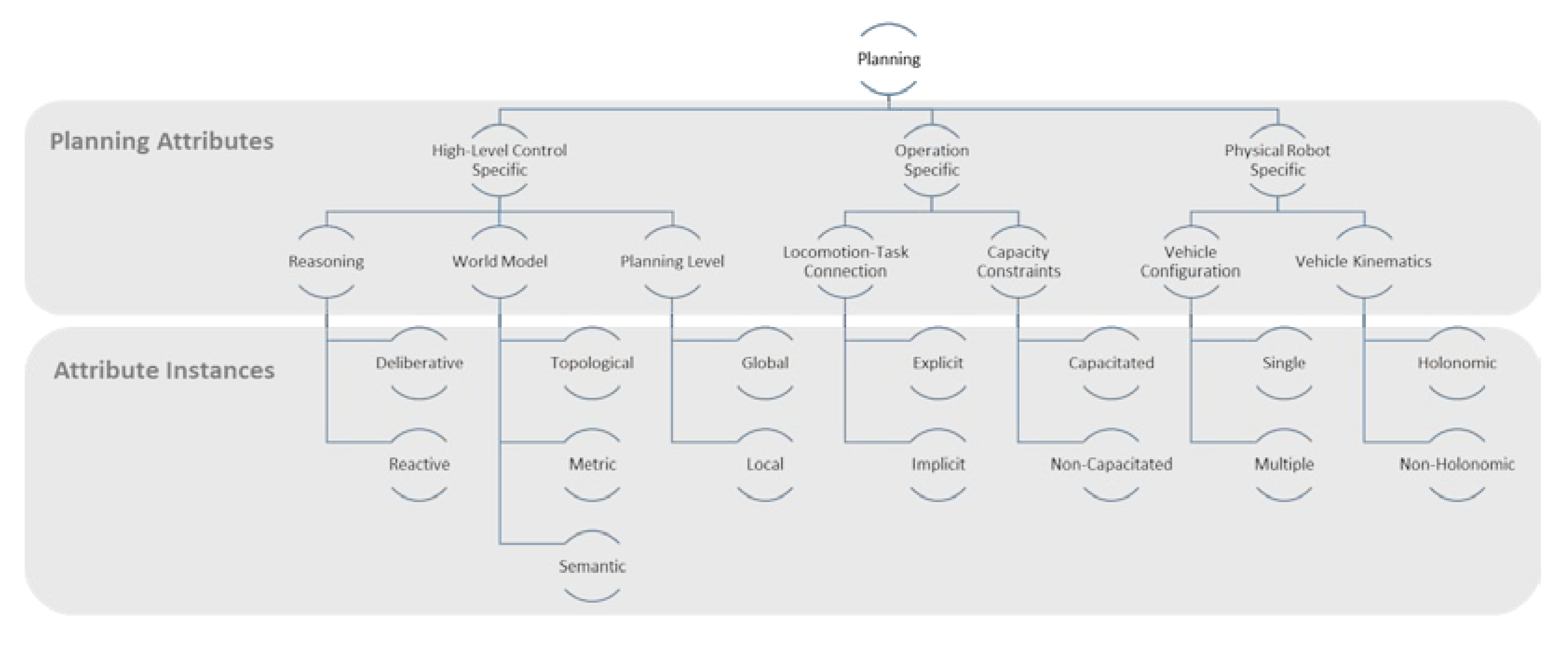
The taxonomy of the selected articles is based on the attributes of the presented planning approaches. As previously presented, in agricultural mobile robots, seven planning attributes have been recognized. These attributes can grouped into three main categories: (i) High-level control-specific attributes, which include reasoning architecture, the world model, and planning level, (ii) operation-specific attributes, which include locomotion–task connection and capacity constraints, and iii) physical robot-specific attributes, which include vehicle configuration and vehicle kinematics (Figure 4).
Furthermore, the articles are also taxonomized based on the findings of the corresponding approaches. These findings include:
- (i)
- Operational environment. Typically, three types of agricultural environments are recognized, including: (a) unstructured environments (arable farming, e.g., wheat and corn); (b) semi-structured environments (open-air horticulture, e.g., orchards and vineyards); and (c) structured environments (greenhouses).
- (ii)
- Operation. This regards physical agronomic operation, e.g., harvesting, spraying.
- (iii)
- Approach validation. This regards the validation means of the presented approach, namely, through simulation, lab experiments, or trials in a physical environment.
3. Review
In order to address large-scale motion planning problems, studies often apply a multi-layered analysis framework mainly consisting of [38]: (i) a global planning layer that produces an optimal path with a priory knowledge of the general environment and static obstacles - this layer divides the workspace into smaller areas; and (ii) a local planning layer that guarantees safety in uncertain environments—this layer recalculates a safe path whilst avoiding dynamic obstacles and changes in the workspace. We follow the same analysis framework here on the review presentation flow, first presenting articles that deal with global planning approaches and then articles dealing with local planning approaches.
The literature on global planning considers both UGVs and UAVs. Selected studies are analyzed below.
With regard to UGVs, the work that presented in [39], a path planning approach for car-like mobile robots in orchard operations based on the A* algorithm and Manhattan metrics (grid map). The proposed approach uses a configuration space that utilizes restrictions, capturing safety and agri-technical limitations, via implementing penalty functions that consider the steering angle, travel direction, roll and pitch angles, and region traversability. In addition, the authors in [40] developed a two-stage randomized kino-dynamic motion planning approach for non-holonomic vehicles (Ackerman steering). At the first stage, a relaxed two-dimensional (2D) path planning was executed using a Rapidly-exploring Random Trees algorithm. A metric function combining path traversal time, heading change, and failure rate was used as a cost function to select the nearest neighboring node. At the second stage, the trajectory of the vehicle was plotted using B-splines for enabling the motion planner to plot smooth paths while ensuring geometric continuity and satisfying maximum curvature conditions.
Authors in [41] examined pasture fields in dairy farms, particularly focusing on the associated agronomic needs. In this context, pasture fields are often divided in three separate operational-wise problems, i.e., reseeding, weeding, and fertilizing by redistributing cowpats. Therefore, [41] defined sub-regions and implemented the Travelling Salesman Problem approach to find the shortest path for a mobile robot visiting these areas. In addition to the topological problem, the proposed system also took into account the feasible trajectory kinematic and dynamic constraints (e.g., working width, turning capacity). In addition, the authors in [42] deployed a set of algorithms for selective patch treatments in a field with row crops by using a robotic vehicle. A mixed weighted networking graph represented the system, which was solved as the asymmetric travelling salesman problem using the parthenogenetic algorithm. The ability of the robot to move in both directions is factored in the mixed graph and the parthenogenetic algorithm leverages this technical feature to generate an optimized path by choosing to reverse even in mid-row operations to reach the next node.
Additionally, the work presented in [21] tested a path planning algorithm along with a user interface for autonomous field coverage in three case studies: (i) coverage of three separate fields; (ii) coverage of three neighboring fields in one mission; and (iii) coverage of a single field and simulating a spraying operation with two refilling locations. The user interface incorporates the field’s geomorphological information along with the UGV’s properties to calculate the desired path. An algorithmic approach of the vehicle routing problem was followed to produce the admissible path and to reduce the working time. The authors in [43] also developed and tested, both via simulation and real-world experiments, a route planning approach for an orchard’s spraying operations based on B-Patters algorithm. The study findings demonstrated reductions in working time (10.7–32.4%), in non-working distance (17.5–40.2%), and in total travelled distance (2.2–6.4%).
Moreover, the authors [44] developed and simulated a path planning algorithm for the autonomous navigation of a mechanically and electrically modified tractor to minimize fuel consumption and related atmospheric emissions while performing a number of agricultural processes (i.e., weed and pest control). The algorithmic solution simultaneously considered a range of parameters including UGV’s fuel consumption, engine emissions, obstacle detection, weed identification, optimal turning angle for the UGV, and paths for area coverage. Conesa-Muñoz et al. (2016) [45] implemented a simulated annealing-based algorithm for area coverage in herbicide applications. To validate the proposed algorithm, which facilitates both global and local planning, five case studies were investigated focusing on the minimization of: (i) the distance travelled in the crop headlands using different turning radii; (ii) the input cost and required time for a fleet of homogeneous vehicles; (iii) the input cost for the required time and both criteria for a fleet of both homogeneous; and (iv) heterogeneous vehicles with small tanks; and (v) the time for a fleet of homogeneous UGVs in a field divided into three parcels. Finally, the work presented in [46] developed a multi-objective path planner for a mobile robot in greenhouse environments. The developed algorithm considered travelling distance and routing angel subject to pesticide tank capacity constraints, and it was tested against four alternative routing test cases.
Considering UAVs, the authors of [47] proposed an area coverage planning system for ensuring a UAV’s energy efficiency and high-resolution aggregated images. The structure of the system was based on into three distinct algorithms for: (i) estimating the consumed energy related to the UAV’s operational speed, acceleration, flying maneuvers and height; (ii) determining an energy efficient path to cover the entire field; and (iii) detecting fail-safes based on the current status of the UAV (i.e., battery level, GPS and ground station signals) to ensure the completion of the operations or the safe return of the UAV to the home position. In addition, the authors in [48] presented a two-level algorithmic approach for the path planning problem of UAVs for spraying operations. Specifically, the first level refers to a grid point-based method for decomposing a field and identifying navigation points, whereas the second level considers a modified boustrophedon algorithm used in coverage path planning field. The integrated approach renders path planning flexible for complex fields, and it is useful for multi-agent crop dusting.
The authors in [49] presented an off-line area coverage planning approach where the area to be scanned is decomposed into a finite set of cells for the optimal sequencing of these cells under the criterion of minimizing the number of changes in the direction of UAVs. To that end, an adapted metaheuristic algorithm was simulated and provided individual paths for multi-UAVs or equivalently a number of paths for a single UAV. Finally, in the work [50] presented a seminal work on complete mission execution that involves planning and control of the UAVs in actual field experiments. Except for area coverage planning, the study concurrently investigated the problems of task generation (area partitioning) and task assignment (sub-areas’ allocation) to minimize the number of turns and overlapped areas which are both affecting the total coverage time. The approach took into account the characteristics of different UAVs and thus it can address problems of heterogeneous fleets.
The authors in [51] proposed a two stage kino-dynamic planning algorithm for cost-based navigation which was tested in experimental weeding applications by using a non-holonomic vehicle. In the first stage, the algorithm explored all the feasible trajectories from an initial to an end-point via using the Rapidly exploring Random Trees as a probabilistic path planner. In the second stage, the movement cost at a non-collision path assignment was minimized via deploying a gradient descent algorithm. Furthermore, in the [52] tested a simulated annealing and a genetic algorithm for the kino-dynamic planning for autonomous agricultural vehicles within field areas with obstacles and/or complicated field borders. The study results demonstrated that the annealing algorithm outperforms the genetic in all tested cases.
In [53], a path planning approach was developed by combining neural networks for describing the motion of the agricultural mobile robot and a genetic algorithm for optimization. The optimization objective was the minimization of the total changes in the steering angle and the required travel time.
Finally, multiple-vehicle systems imply the use and physical interaction among the systems within a fleet of mobile robots [54]. The notion of “physical” interaction is used to distinguish multiple robotic systems from multiple-agent systems which usually refer to distributed computer systems involving individual stationary nodes. Notably, in multi-robot systems, the locomotion plan is complex owing to the multi-aspect requirements for avoiding: (i) collision with obstacles; (ii) deadlocks; (iii) collision with other robots; and (iv) traffic congestion situations. This generates the notion of coordination that is the generation of distributed strategies for a fleet of cooperating robots in a given task to optimize the performance. The present research recognizes coordination as a control discipline rather than a planning one. However, due to the importance of coordination in the execution of multi-robot enabled planned tasks, and due to the inherent optimization process in this kind of control, it was considered valuable to include aspects on motion coordination in this study.
Indicatively, the authors of [55] tested, at both simulation and experimental levels, a framework that utilized the A* algorithm with the Euclidian distance to plan a point-to-point collision-free navigation of multiple UGVs. The dynamic structure of the fleet allowed potential de-formations to avoid obstacles and execute complicate kinematics. Additionally, the authors of [56] presented a distributed control framework for the coordination of the motions of field robotic teams which supports both cases of master-slave and peer-to-peer operation modes. The results showed that under this framework field robots can coordinate with nearby team members by altering their trajectories (in terms of velocity profiles or path shapes) and avoid collisions.
Table 1 taxonomizes the selected studies on locomotion planning according to the defined planning attributes and also provides information about the application features of each approach. It is evident that the defined attributes apply to all of the approaches. Furthermore, the variation of the instances of these attributes among the various approaches maps the current state of research in the domain of mobile robots in agriculture. For example, there is clear preference toward global planning approaches compared to local planning approaches. The same stands also between deliberative and reactive reasoning architectures in favor of the former. Finally, although agricultural environments are characterized in their majority by rough terrain, there is a lack in approaches dealing with 3D world models. All of the above reveal gaps in the current research.
4. Discussion
4.1. Locomotion Planning as Part of the Overall Mission Plannning
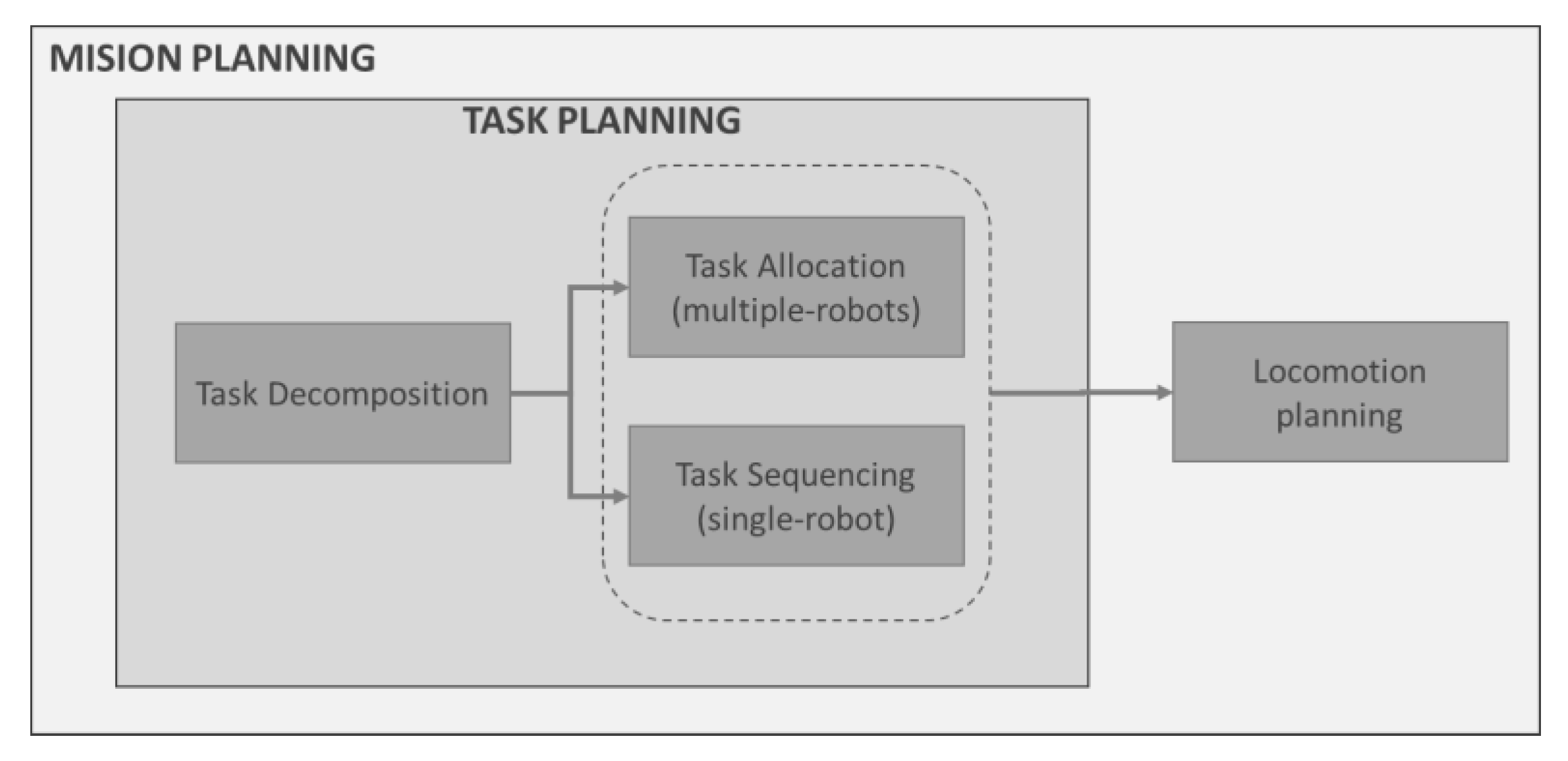
Mission planning is the process of determining the sub-tasks that need to be executed (i.e., task decomposition), assigning a sequence for these sub-tasks’ execution, in the case of a single-robot, or assign individual autonomous robots to these sub-tasks, in the case of multiple robots, and determining a corresponding course of collision-free actions (i.e., locomotion planning) [50] (Figure 5). In principle, task decomposition refers to the process of partitioning a task into a number of well-defined and non-overlapping sub-tasks. For example, in terms of locomotion in agricultural mobile robotics, explicitly and implicitly connected tasks are identified. Considering that explicitly connected tasks mainly regard area coverage operations, the decomposition of an area to be covered in sub-regions is a task-partitioning process [57,58]. In this case, each individual sub-field area is considered as a task for a single mobile robotic unit. By contrast, the sequence for visiting a series of waypoints or entities in a specified field (or sub-field area) implicitly connects to locomotion tasks, including, for example, the case of generating and traversing fieldwork tracks while ensuring full area coverage regardless of any terrain geomorphological characteristics or a robot’s driving specifications [59].
In the context of multiple-robot systems, knowledge about the level of collaboration among the utilized mobile robots is required to enable task sub-division and allocation based on performance criteria, availability constraints, etc. Thereafter, task decomposition and allocation can inform the locomotion planner of each individual vehicle [50]. In the case of collaborative mobile robots, the actions of an individual unit depend on the activities of the participating fleet members; therefore, the performance of a robotic system is evaluated at an aggregated fleet level [60]. In cases where no collaborations underpin a multi-robot system, the tasks are assigned either when an operation commences or in discrete points in time during task execution. The majority of real-world cases in automated agriculture correspond to the second case.
Regarding field operations, there is a lack of works dealing with a complete mission planning system. Just to mention a few works dealing with mission planning, the authors of [61] presented an XML-based mission planner for an autonomous agricultural tractor for field coverage following a tree hierarchy model comprising of several actions including: (i) interpretation of field geometry, dimensions, sub-regions and critical points; (ii) determination of the type of motion between successive points along with the sequence of points to follow; and (iii) deliberation of operations in every point in the field. In [43], an approach for the real-time path planning of a fleet of tractors in peat moss harvesting was provided. Each autonomous tractor could perform four tasks: drive to field; harvest the field; drive to a pile; and dump at a pile. To provide planning for these tasks two methods were applied, a visibility graph planner (utilizing polygonal features) and a grid-based planner (2D cells of 1 × 1 m). To ensure the collision-free navigation, all the pre-planned tasks were executed in a GPS-based mapped area.
4.2. Limitations
This research is intended for researchers and practitioners willing to gain familiarity with the literature on planning aspects of autonomous operations in agriculture, enabled by mobile robots, with a view to contributing to this area. In this regard, following the reasoning in [62], the intention was not to perform an exhaustive literature review. Instead, we applied the ‘traditional narrative’ review approach and attempted to identify a set of representative papers that investigate planning aspects of mobile robots (both UGVs and UAVs) in main agricultural operations to gain insights. Our focus is on research that could support researchers and stakeholders alike in deploying effective and efficient autonomous operations by enabling a fundamental understanding over the spectrum of involved planning factors and decisions encountered in practice.
4.3. Future Research
The digital transformation discourse and Industry 4.0 in agriculture pave novel research avenues where mobile robots will be deployed effectively and efficiently to replace human labor in the case of low-added value and time-consuming operations [63,64]. In this context, the focus of future research should be in areas that have not received research attention, namely:
- Dynamic planning of autonomous operations, i.e., analyzing and analytically describing the process of efficiently updating a mobile robot’s plan, either when further knowledge of the working environment is gained or when the local obstacle avoidance system triggers an instantaneous and unplanned response; and
- Complete mission planning, i.e., a comprehensive planning system including both task and locomotion planning for the execution of a field operation.
In addition, albeit the on-going advances in the planning aspects of robotic systems, the current generations of such applications, particularly in the industrial manufacturing domain, are not yet in the stage to allow the synergistic action with the human factor [65], mainly owing to operational complexity and safety reasons. To that effect, the planning of cooperative tasks of high dimensionality, often interactively with a human or another mobile robot system, are promising research areas with substantial impact in terms of economic, environmental and social sustainability [66].
5. Conclusions
This research sets out the theoretical foundation for understanding the planning of mobile robots, particularly within the field of agriculture. A “narrative” review approach was adopted to first provide the basic terminology over the technical aspects of mobile robots used in autonomous operations, and then the fundamental planning aspects of mobile robots in agricultural environments were identified. The main gap in the current mission-planning-related literature refers to the limited number of studies following a system engineering approach. More specifically, the majority of the studies test the performance of existing area decomposition and vehicle routing algorithm aspects, mainly in a simulation environment, and neglect the structure and specifications of the intended operations and tasks that have to be performed by the available mobile robot. Consequently, isolated planning approaches have been developed. Furthermore, in the few experimental studies, the trials are limited to few robot functionalities and do not integrally consider the deployment of a spectrum of field operations.
This paper put up two RQs. First, RQ#1 concerns the basic and concise terminology over the technical aspects of mobile robots in autonomous operations and was answered with a critical analysis of the selected works. Our research group’s expertise and experience on mobile robots in agriculture along with research evidence reveal that most of the technical terms are used interchangeably, thus not enabling effective communication among stakeholders in the field. Second, to tackle RQ#2, we synthesized evidence from extant studies, and we proposed seven attributes of planning, namely: high-level control-specific attributes, which include reasoning architecture, the world model, and planning level, (ii) operation-specific attributes, which include locomotion–task connection and capacity constraints, and (iii) physical robot-specific attributes, which include vehicle configuration and vehicle kinematics.
This research aimed at supporting the planning of mobile robots in agriculture through identifying and classifying a set of technical terms and basic planning attributes. We envisage that the proposed clarification will inform analytical tools used for the effective design of autonomous operations in agriculture [67], hence further enabling the digital transformations in the extended agri-food supply networks [68,69].
Author Contributions
Conceptualization, D.B. and C.G.S.; Methodology, N.T. and V.M.; Investigation, V.M. and D.K.; Writing-Original Draft Preparation, V.M.; N.T.; D.K.; S.P.; D.B. and C.G.S.; Writing-Review and Editing, N.T.; D.B. and S.P.; L.B., Visualization, N.T.; V.M. and D.K.; Supervision, D.B. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
This research has been supported by the Project: “Human-Robot Synergetic Logistics for High Value Crops” (project acronym: SYNERGIE), funded by the General Secretariat for Research and Technology (GSRT) under reference no. 2386.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Braña, F.J. A fourth industrial revolution? Digital transformation, labor and work organization: a view from Spain. J. Ind. Bus. Econ. 2019, 46, 415–430. [Google Scholar] [CrossRef]
- Sebastian, B.; Ben-Tzvi, P. Physics Based Path Planning for Autonomous Tracked Vehicle in Challenging Terrain. J. Intell. Robot. Syst. Theory Appl. 2019, 95, 511–526. [Google Scholar] [CrossRef]
- Mukherjee, U.K.; Sinha, K.K. Robot-assisted surgical care delivery at a hospital: Policies for maximizing clinical outcome benefits and minimizing costs. J. Oper. Manag. 2020, 66, 227–256. [Google Scholar] [CrossRef]
- Silvestri, P.; Zoppi, M.; Molfino, R. Dynamic investigation on a new robotized vehicle for urban freight transport. Simul. Model. Pract. Theory 2019, 96, 101938. [Google Scholar] [CrossRef]
- Sorensen, C.G.; Pesonen, L.; Fountas, S.; Suomi, P.; Bochtis, D.; Bildsøe, P.; Pedersen, S.M. A user-centric approach for information modelling in arable farming. Comput. Electron. Agric. 2010, 73, 44–55. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.R.; Scaramuzza, D. Introduction to Autonomous Mobile Robots, 2nd ed.; MIT Press: Cambridge, MA, USA, 2011; ISBN 026219502X. [Google Scholar]
- Masoud, S.A.; Masoud, A.A. Motion planning in the presence of directional and regional avoidance constraints using nonlinear, anisotropic, harmonic potential fields: A physical metaphor. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2002, 32, 705–723. [Google Scholar] [CrossRef]
- Bruzzone, L.; Quaglia, G. Review article: Locomotion systems for ground mobile robots in unstructured environments. Mech. Sci. 2012, 3, 49–62. [Google Scholar] [CrossRef] [Green Version]
- Aravind, K.R.; Raja, P.; Pérez-Ruiz, M. Task-based agricultural mobile robots in arable farming: A review. Span. J. Agric. Res. 2017, 15, e02R01. [Google Scholar] [CrossRef]
- Ko, M.H.; Ryuh, B.S.; Kim, K.C.; Suprem, A.; Mahalik, N.P. Autonomous Greenhouse Mobile Robot Driving Strategies from System Integration Perspective: Review and Application. IEEE/ASME Trans. Mechatron. 2015, 20, 1705–1716. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Tranfield, D.; Denyer, D.; Smart, P. Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Milford, M.; Wyeth, G. Hybrid robot control and SLAM for persistent navigation and mapping. Robot. Auton. Syst. 2010, 58, 1096–1104. [Google Scholar] [CrossRef]
- Sontag, E.D. Mathematical Control Theory; Texts in Applied Mathematics; Springer: New York, NY, USA, 1998; Volume 6, ISBN 978-1-4612-6825-3. [Google Scholar]
- Song, S.; Zeng, X.; She, Y.; Wang, J.; Su, H.J. Modeling and control of inherently safe robots with variable stiffness links. Robot. Auton. Syst. 2019, 120, 103247. [Google Scholar] [CrossRef]
- Posadas, J.L.; Poza, J.L.; Simó, J.E.; Benet, G.; Blanes, F. Agent-based distributed architecture for mobile robot control. Eng. Appl. Artif. Intell. 2008, 21, 805–823. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations. Part 2: Operations and systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Asada, M.; Fukui, Y.; Tsuji, S. Representing Global World of a Mobile Robot with Relational Local Maps. IEEE Trans. Syst. Man Cybern. 1990, 20, 1456–1461. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics part I. Biosyst. Eng. 2009, 104, 447–457. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G. The vehicle routing problem in field logistics: Part II. Biosyst. Eng. 2010, 105, 180–188. [Google Scholar] [CrossRef]
- Hirayama, M.; Guivant, J.; Katupitiya, J.; Whitty, M. Path planning for autonomous bulldozers. Mechatronics 2019, 58, 20–38. [Google Scholar] [CrossRef]
- Arkin, R.C. Integrating behavioral, perceptual, and world knowledge in reactive navigation. Robot. Auton. Syst. 1990, 6, 105–122. [Google Scholar] [CrossRef]
- Nilsson, N.J. Principles of Artificial Intelligence; Springer: Berlin, Germany, 1982; ISBN 9783540113409. [Google Scholar]
- Steels, L. Exploiting analogical representations. Robot. Auton. Syst. 1990, 6, 71–88. [Google Scholar] [CrossRef] [Green Version]
- Bochtis, D.D.; Sørensen, C.G.; Jørgensen, R.N.; Green, O. Modelling of material handling operations using controlled traffic. Biosyst. Eng. 2009, 103, 397–408. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S. Learning metric-topological maps for indoor mobile robot navigation. Artif. Intell. 1998, 99, 21–71. [Google Scholar] [CrossRef] [Green Version]
- Kuipers, B.; Byun, Y.T. A robot exploration and mapping strategy based on a semantic hierarchy of spatial representations. Robot Auton. Syst. 1991, 8, 47–63. [Google Scholar] [CrossRef]
- Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. Building Multiversal Semantic Maps for Mobile Robot Operation. Knowl.-Based Syst. 2017, 119, 257–272. [Google Scholar] [CrossRef]
- Lueth, T.C.; Nassal, U.M.; Rembold, U. Reliability and integrated capabilities of locomotion and manipulation for autonomous robot assembly. Robot. Auton. Syst. 1995, 14, 185–198. [Google Scholar] [CrossRef]
- Low, E.S.; Ong, P.; Cheah, K.C. Solving the optimal path planning of a mobile robot using improved Q-learning. Robot. Auton. Syst. 2019, 115, 143–161. [Google Scholar] [CrossRef]
- Zhong, X.; Tian, J.; Hu, H.; Peng, X. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-Scale Dynamic Environment. J. Intell. Robot. Syst. Theory Appl. 2020, 1–13. [Google Scholar] [CrossRef]
- Jensen, M.F.; Bochtis, D.; Sørensen, C.G. Coverage planning for capacitated field operations, part II: Optimisation. Biosyst. Eng. 2015, 139, 149–164. [Google Scholar] [CrossRef]
- Baumeister, R.F.; Leary, M.R. Writing narrative literature reviews. Rev. Gen. Psychol. 1997, 1, 311–320. [Google Scholar] [CrossRef]
- Hammersley, M. On “Systematic” Reviews of Research Literatures: A “narrative” response to Evans & Benefield. Br. Educ. Res. J. 2001, 27, 543–554. [Google Scholar]
- Jones, O.; Gatrell, C. Editorial: The Future of Writing and Reviewing for IJMR. Int. J. Manag. Rev. 2014, 16, 249–264. [Google Scholar] [CrossRef]
- Mahmoudzadeh, S.; Powers, D.M.W.; Atyabi, A. UUV’s Hierarchical DE-Based Motion Planning in a Semi Dynamic Underwater Wireless Sensor Network. IEEE Trans. Cybern. 2019, 49, 2992–3005. [Google Scholar] [CrossRef] [PubMed]
- Linker, R.; Blass, T. Path-planning algorithm for vehicles operating in orchards. Biosyst. Eng. 2008, 101, 152–160. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M. Randomised kinodynamic motion planning for an autonomous vehicle in semi-structured agricultural areas. Biosyst. Eng. 2014, 126, 30–44. [Google Scholar] [CrossRef]
- Cariou, C.; Gobor, Z.; Seiferth, B.; Berducat, M. Mobile Robot Trajectory Planning Under Kinematic and Dynamic Constraints for Partial and Full Field Coverage. J. Field Robot. 2017, 34, 1297–1312. [Google Scholar] [CrossRef]
- Li, Y.L.; Yi, S.P. Improving the efficiency of spatially selective operations for agricultural robotics in cropping field. Span. J. Agric. Res. 2013, 11, 56–64. [Google Scholar] [CrossRef] [Green Version]
- Bochtis, D.; Griepentrog, H.W.; Vougioukas, S.; Busato, P.; Berruto, R.; Zhou, K. Route planning for orchard operations. Comput. Electron. Agric. 2015, 113, 51–60. [Google Scholar] [CrossRef]
- Gonzalez-de-Soto, M.; Emmi, L.; Garcia, I.; Gonzalez-de-Santos, P. Reducing fuel consumption in weed and pest control using robotic tractors. Comput. Electron. Agric. 2015, 114, 96–113. [Google Scholar] [CrossRef]
- Conesa-Muñoz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Route planning for agricultural tasks: A general approach for fleets of autonomous vehicles in site-specific herbicide applications. Comput. Electron. Agric. 2016, 127, 204–220. [Google Scholar] [CrossRef]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Mohamed, Z.; Rahman, M.K.I.A.; Iida, M. Multi-objective path planner for an agricultural mobile robot in a virtual greenhouse environment. Comput. Electron. Agric. 2019, 157, 488–499. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Coverage Path Planning for UAVs Photogrammetry with Energy and Resolution Constraints. J. Intell. Robot. Syst. 2016, 83, 445–462. [Google Scholar] [CrossRef]
- Moon, S.-W.; Shim, D.H.-C. Study on Path Planning Algorithms for Unmanned Agricultural Helicopters in Complex Environment. Int. J. Aeronaut. Sp. Sci. 2009, 10, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Valente, J.; Del Cerro, J.; Barrientos, A.; Sanz, D. Aerial coverage optimization in precision agriculture management: A musical harmony inspired approach. Comput. Electron. Agric. 2013, 99, 153–159. [Google Scholar] [CrossRef] [Green Version]
- Barrientos, A.; Colorado, J.; del Cerro, J.; Martinez, A.; Rossi, C.; Sanz, D.; Valente, J. Aerial remote sensing in agriculture: A practical approach to area coverage and path planning for fleets of mini aerial robots. J. Field Robot. 2011, 28, 667–689. [Google Scholar] [CrossRef] [Green Version]
- Vougioukas, S.; Blackmore, S.; Nielsen, J.; Fountas, S. A two-stage optimal motion planner for autonomous agricultural vehicles. Precis. Agric. 2006, 7, 361–377. [Google Scholar] [CrossRef]
- Ferentinos, K.P.; Arvanitis, K.G.; Sigrimis, N. Heuristic optimization methods for motion planning of autonomous agricultural vehicles. J. Glob. Optim. 2002, 23, 155–170. [Google Scholar] [CrossRef]
- Noguchi, N.; Terao, H. Path planning of an agricultural mobile robot by neural network and genetic algorithm. Comput. Electron. Agric. 1997, 18, 187–204. [Google Scholar] [CrossRef]
- Cao, Y.U.; Fukunaga, A.S.; Kahng, A. Cooperative Mobile Robotics: Antecedents and Directions. Auton. Robots 1997, 4, 7–27. [Google Scholar] [CrossRef]
- Hao, Y.; Agrawal, S.K. Formation Planning and Control of UGVs with Trailers. Auton. Robots 2005, 19, 257–270. [Google Scholar] [CrossRef] [Green Version]
- Vougioukas, S.G. A distributed control framework for motion coordination of teams of autonomous agricultural vehicles. Biosyst. Eng. 2012, 113, 284–297. [Google Scholar] [CrossRef]
- Oksanen, T.; Visala, A. Coverage path planning algorithms for agricultural field machines. J. Field Robot. 2009, 26, 651–668. [Google Scholar] [CrossRef]
- Hameed, I.A.; Bochtis, D.D.; Sørensen, C.G.; Jensen, A.L.; Larsen, R. Optimized driving direction based on a three-dimensional field representation. Comput. Electron. Agric. 2013, 91, 145–153. [Google Scholar] [CrossRef]
- Hameed, I.A.; la Cour-Harbo, A.; Osen, O.L. Side-to-side 3D coverage path planning approach for agricultural robots to minimize skip/overlap areas between swaths. Robot. Auton. Syst. 2016, 76, 36–45. [Google Scholar] [CrossRef]
- Parker, L.E. Current research in multirobot systems. Artif. Life Robot. 2003, 7, 1–5. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Vougioukas, S.G.; Griepentrog, H.W. A Mission Planner for an Autonomous Tractor. Trans. ASABE 2009, 52, 1429–1440. [Google Scholar] [CrossRef]
- Ramdas, K. Managing Product Variety: An Integrative Review and Research Directions. SSRN Electron. J. 2001. Available online: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=290774 (accessed on 12 February 2020). [CrossRef]
- Marinoudi, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Robotics and labour in agriculture. A context consideration. Biosyst. Eng. 2019, 184, 111–121. [Google Scholar] [CrossRef]
- Lampridi, M.G.; Kateris, D.; Vasileiadis, G.; Marinoudi, V.; Pearson, S.; Sørensen, C.G.; Balafoutis, A.; Bochtis, D. A Case-Based Economic Assessment of Robotics Employment in Precision Arable Farming. Agronomy 2019, 9, 175. [Google Scholar] [CrossRef] [Green Version]
- Tsarouchi, P.; Matthaiakis, A.S.; Makris, S.; Chryssolouris, G. On a human-robot collaboration in an assembly cell. Int. J. Comput. Integr. Manuf. 2017, 30, 580–589. [Google Scholar] [CrossRef] [Green Version]
- Bechtsis, D.; Tsolakis, N.; Vlachos, D.; Iakovou, E. Sustainable supply chain management in the digitalisation era: The impact of Automated Guided Vehicles. J. Clean. Prod. 2017, 142, 397–3984. [Google Scholar] [CrossRef] [Green Version]
- Tsolakis, N.; Bechtsis, D.; Srai, J.S. Intelligent autonomous vehicles in digital supply chains: From conceptualisation, to simulation modelling, to real-world operations. Bus. Process Manag. J. 2019, 25, 414–437. [Google Scholar] [CrossRef]
- Srai, J.S. Mapping industrial systems - A supply network perspective on enabling technologies, processes and actors. Int. J. Manuf. Technol. Manag. 2017, 31, 82–99. [Google Scholar] [CrossRef]
- Sørensen, C.G.; Bochtis, D.D. Conceptual model of fleet management in agriculture. Biosyst. Eng. 2010, 105, 41–50. [Google Scholar] [CrossRef]
Figure 1.
The computational and physical sub-systems of a mobile robot and their connection to the environment.
Figure 1.
The computational and physical sub-systems of a mobile robot and their connection to the environment.

Figure 2.
General mobile robot architecture in the case of implicit connection between locomotion and task.
Figure 2.
General mobile robot architecture in the case of implicit connection between locomotion and task.

Figure 3.
General planning architecture for a mobile robot system.

Figure 4.
Planning attributes and corresponding instances in locomotion planning for agricultural robots.
Figure 4.
Planning attributes and corresponding instances in locomotion planning for agricultural robots.

Figure 5.
The place of locomotion planning in overall mission planning.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
List and taxonomy of selected articles in locomotion planning.
| Article | Year | Agent | Planning Attributes | Application Features | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Planning Level | Reasoning Architecture | World Model | Vehicle Configuration | Capacity Constraints | Vehicle Kinematics | Locomotion–Task Connection | Operational Environment | Operation | Approach Validation | |||
| Barrientos et al. [50] | 2011 | UAV | Global | Deliberative | Topological | Multiple | Capacitated | Holonomic | Explicit | Semi-structured | Monitoring | Experiment |
| Simulation | ||||||||||||
| Bochtis et al. [43] | 2015 | UGV | Global | Deliberative | Metric | Single | Non-Capacitated | Non-Holonomic | Explicit | Semi-structured | Mowing | Experiment |
| Pesticides Spraying | Simulation | |||||||||||
| Bochtis et al. [21] | 2009 | UGV | Global | Deliberative | Metric | Single | Capacitated | Non-Holonomic | Explicit | Unstructured | Grass Cutting | Experiment |
| Spraying | ||||||||||||
| Cariou et al. [41] | 2017 | UGV | Global | Deliberative | Metric | Single | Non-Capacitated | Non-Holonomic | Explicit & Implicit | Unstructured | Scouting—Pasture Maintenance | Experiment |
| Conesa-Muñoz et al. [45] | 2016 | UGV | Global | Deliberative | Metric | Single | Non-Capacitated | Not Specified | Implicit | Semi-structured | Pesticides Spraying | Simulation |
| Di Franco and Buttazzo [47] | 2016 | UAV | Global | Deliberative | Topological & Metric | Single | Non-Capacitated | Non-Holonomic | Explicit | Not Specified | Monitoring | Experiment |
| Elbanhawi and Simic [40] | 2014 | UGV | Global | Deliberative | Metric | Single | Non-Capacitated | Non-Holonomic | Not Specified | Semi-structured | Not Specified | Experiment |
| Simulation | ||||||||||||
| Ferentinos et al. [52] | 2002 | UGV | Local | Deliberative | Metric | Single | Non-Capacitated | Non-Holonomic | Not Specified | Not Specified | Not Specified | Simulation |
| Gonzalez-de-Soto et al. [44] | 2015 | UGV | Global | Deliberative | Metric (3D) | Single | Non-Capacitated | Non-Holonomic | Explicit | Unstructured | Not Specified | Experiment |
| Hao et al. [55] | 2015 | UGV | Local | Reactive | Metric | Multiple | Non-Capacitated | Non-Holonomic | Implicit | Unstructured | Harvesting | Simulation & Lab Experiment |
| Li and Yi [42] | 2013 | UGV | Global | Deliberative | Metric | Single | Non-Capacitated | Non-Holonomic | Implicit | Unstructured | Spot Application (fertilizing, spraying) | Simulation |
| Linker and Blass [39] | 2008 | UGV | Global & Local | Deliberative | Topological | Single | Non-Capacitated | Non-Holonomic | Not Specified | Semi-structured | Not Specified | Simulation |
| Mahmud et al. [46] | 2019 | UGV | Global | Deliberative | Metric | Single | Capacitated | Non-Holonomic | Explicit | Structured | Pesticides Spraying | Experiment |
| Moon and Shim [48] | 2009 | UAV | Global | Deliberative | Metric | Single & Multiple | Non-Capacitated | Non-Holonomic | Explicit | Not Specified | Pesticides Spraying | Simulation |
| Noguchi and Terao [53] | 1997 | UGV | Global | Deliberative | Metric | Single | Non-Capacitated | Non-Holonomic | Explicit | Not Specified | Water Spraying | Experiment |
| Simulation | ||||||||||||
| Valente et al. [49] | 2013 | UAV | Global | Deliberative | Topological | Single & Multiple | Capacitated | Holonomic | Explicit | Semi-structured | Monitoring | Simulation |
| Vougioukas [56] | 2012 | UGV | Local | Reactive | Metric | Multiple | Non-Capacitated | Non-Holonomic | Implicit | Not Specified | Not Specified | Simulation |
| Vougioukas et al. [51] | 2006 | UGV | Local | Deliberative | Metric | Single | Non-Capacitated | Non-Holonomic | Explicit | Semi-structured | Weeding | Experiment |
| Simulation | ||||||||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Appl. Sci. 2020, 10, 3453. https://doi.org/10.3390/app10103453
AMA Style
Moysiadis V, Tsolakis N, Katikaridis D, Sørensen CG, Pearson S, Bochtis D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Applied Sciences. 2020; 10(10):3453. https://doi.org/10.3390/app10103453
Chicago/Turabian StyleMoysiadis, Vasileios, Naoum Tsolakis, Dimitris Katikaridis, Claus G. Sørensen, Simon Pearson, and Dionysis Bochtis. 2020. "Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects" Applied Sciences 10, no. 10: 3453. https://doi.org/10.3390/app10103453
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.