Neural Approximation Enhanced Predictive Tracking Control of a Novel Designed Four-Wheeled Rollator

1
School of Art, Soochow University, Suzhou 215000, China
2
Dipartimento di Elettronica, Informazione e Bioingegneria, Politecnico di Milano, 20133 Milano, Italy
3
School of Mechanical Engineering, Shandong University, Jinan 250100, China
4
School of Automation Science and Engineering, South China University of Technology, Guangzhou 510640, China
5
School of Art, Guangdong University of Technology, Guangzhou 510000, China
*
Author to whom correspondence should be addressed.
Appl. Sci. 2020, 10(1), 125; https://doi.org/10.3390/app10010125
Submission received: 14 November 2019
/
Revised: 13 December 2019
/
Accepted: 19 December 2019
/
Published: 23 December 2019
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
With the population explosion, the inconvenience of travel for the elderly has gradually become a matter of society. How to promote the safety assistance system of the rollator equipment is the challenge. As a medical device, elderly mobility aid has extremely critical security conditions. The rollator can support the elderly to return a healthy life, carry out outdoor rehabilitation training, and improve the condition in their later years. However, most of the elderly rollator is produced after the rehabilitation of medical aids, and profoundly overlooked the needs of the elderly. In the field of industrial design, innovative methods like brainstorming are frequently adopted, which are inefficient and dependent on the designer’s experience. Therefore, this article combines the theory of inventive problem solving (TRIZ theory) with the Kano model and the quality function deployment (QFD) theory, advancing the product design of the industrial applications.
Abstract
In the past few decades, the research of assistant mobile rollators for the elderly has attracted more and more investigation attention. In order to satisfy the needs of older people or disabled patients, this paper develops a neural approximation based predictive tracking control scheme to improve and support the handicapped through the novel four-wheeled rollator. Firstly, considering the industrial product theory, a novel Kano-TRIZ-QFD engineering design approach is presented to optimize the mechanical structure combined with humanistic care. At the same time, in order to achieve a stable trajectory tracking control for the assistant rollator system, a neural approximation enhanced predictive tracking control is discussed. Finally, autonomous tracking mobility of the presented control scheme has received sufficient advantage performance in position and heading angle variations under the external uncertainties. As the market for the medical device of the elderly rollators continues to progress, the method discussed in this article will attract more investigation and industry concerns.
1. Introduction
With the increasing interest in medical and health equipment for the elderly, the market for walking aids has been growing, which has promoted market development in usage and production companies. At present, the development and production of disabled walking aids are still in its infancy, and the adjustment of various aspects is still immature [1,2,3,4]. Designers mostly use questionnaires, interviews, observations, etc., in order to obtain the user needs to study the walking aid. However, towards obtaining the user’s needs, the designer neglects the demand of the actual functional analysis and standardized design; in order words, they just directly the rollator product according to their subject feeling, which may result in some functions of the design not being urgently needed by the user, and the urgent need to be solved is not satisfied.
Teoriya Resheniya Izobreatatelskikh Zadatch (TRIZ) theory is the industrial standardization of problem-solving and investigation, which involves a reasonable methodology, expert knowledge base, and model-based technology for innovative solutions [5]. When using TRIZ to solve a problem, the first step is to describe the design problem, and then the second step is to solve the problem solution to obtain a universal solution (simulated solution). Finally, the last step is to combine industry knowledge and turn standard solutions for industry domain problems. The Kano model, which is generated by Noriaki Kano, is aimed at the function demand relationship between the degree of consumer satisfaction and the product quality, which can be employed to classify the perception of product quality. The Kano model is a set of structured questionnaires and analysis methods based on the principle of customer demand segmentation. The survey is mainly carried out through standardized questionnaires, and the attributes of various factors are classified according to the survey results. At the same time, the positioning of product attributes is determined to improve customer satisfaction. Quality Function Deployment (QFD) is a product development considering user demand, which employs a systematic and a standardized approach to analyze and investigate user requirements. In particular, the House of Quality (HOQ) is the primary tool for implementing this method in the product improvement process. How to combine three methods to design a medical rehabilitation device that fits the physical and mental health of the elderly is the main study of this article [6].
TRIZ’s application fields have evolved from innovation in mechanical engineering technology to innovation in many fields, including management science and social science [7,8]. Roy Stratton discusses the breadth of TRIZ applications [9]. Taguchi and Chowdhury developed several new reinforcement design methods using TRIZ and axiom design theory; identified an appropriate material-field analysis model along with the action [10]. Borgianni et al. studied the intersection of TRIZ and axiom design, summing up the possible points and advantages and disadvantages of the combined use of the TRIZ and QFD [11]. Lee et al. studied the integration of TRIZ, QFD and service blueprint methods and applied them to service design, so that the design can accurately meet user needs [12]. Vinodh et al. studied the application of TRIZ in the auto parts industry, and integrated quality function deployment, creative problem solving (TRIZ) theory, and the analytic hierarchy process to form a new innovative theoretical model [13]. Filippi et al. integrated the models of TRIZ and the interaction design guidelines (IDGL), and studied the comprehensive application of TRIZ’s 39 engineering parameters, 40 invention principles and interaction design principles-IDGL, and got 31 new interaction design parameters and 47 invention principles that can be applied to the usability of interaction design [14]. Pokhrel et al. applied the contradictory matrix of TRIZ to the chemical industry and combined the knowledge of the chemical industry with the contradiction matrix, and summed up the new characteristics and invention principles of the more specific TRIZ contradiction matrix, which can be applied in the chemical industry [15]. Van Pelt et al. studied the combination of TRIZ and Human-Centered Design (HCD) to understand user needs in product development and build a user-centric design model [16].
The strength of TRIZ lies in its powerful problem-solving tool. The advantage of QFD is that it can translate user requirements into design requirements and explore problems through its core tool HOQ. Many scholars combine the advantages of the two to form a user-centered product innovation model [17,18]. Through QFD, the user’s needs can be transformed into product features with high user satisfaction, which can solve the problem that customers really care about. Therefore, when the designer applies TRIZ to various industries, they combine TRIZ with some innovative tools or innovate TRIZ according to the industry to form new theoretical models and methods to reduce the difficulty of using TRIZ. Each country in the world has different degrees of industrialization and attention to industrial design, which indirectly affects the research level of applying TRIZ to industrial design. There are few international applied types of research on how to apply TRIZ to the product design processes in the industrial design field [19,20].
It is essential to examine the mobility of the rollator system for the elderly business feasibility when cramming the mechanical structure of the assistant elderly rollator [21,22,23]. The motion stability control scheme of the rollator practical engineering is the chief difficulty for security, particularly for the imperfect athletic capacity [24]. Therefore, corresponding auxiliary systems and stability controllers must be intended to guarantee the safety of elderly products [25,26,27].
Because the assistant movement of the four-wheeled rollator can be restrained by handbrake and human traction, this article concentrates on its lateral motion stability under unknown disturbances. The goal of the tracking stability control of the four-wheel rollator is to develop a superior controller to manage the continuous trajectory tracking control of the rollator under physical interactions. There are some kinds of literature to consider the tracking control scheme of the rollator, such as the proportion integration differentiation (PID) method, sliding model variable control, neural network control, and active disturbance rejection control. For example, Ref. [28] proposed a neural network PID controller according to the rollator model and steering system model, which has the advantage performance of real-time and robustness. To overcome the yaw rate and slip rate effectively, Ref. [29] applied a parameter self-tuning fuzzy PID approach. Considering the challenges of nonlinearity, parameter uncertainty, and time-varying external disturbance, an adaptive fuzzy sliding mode control scheme is addressed to master stability control in [30]. Combined with the yaw rate and the centroid slip angle error as input variables, and the braking torque as the steering angle of the control objectives, Ref. [31] presents a multiple adaptive control algorithm.
However, how to realize the high security and accuracy for the assistant walking system is the main difficulty in the practical elderly rollator. In engineering applications, Ref. [32] presented an intelligent rule-based controller for a smart walker to obtain a soft interaction between the user and the rollator, which considers the interaction force and acceleration. When it comes to the assistant rollator system to maintain the user with balance, the upper-limb assisted walking system is presented in [33]. On the other hand, in [34], this article considers the biomechanical analysis of rollator walking, which improves the walking performance in terms of the way and speed, and many cases serve as a pre-requisite for living a healthy life.
In this paper, combined with the Kano–QFD model and TRIZ industrial product design theory, a novel structure of four-wheeled rollator is put forward, which utilizes a predictive tracking controller based on a neural approximation to solve the trajectory tracking control of the assistant elderly rollator. The experimental performance is carried out to approve the feasibility and accuracy of the developed rollator system. The main contribution of this paper is as follows:
- To facilitate close to the requirements of the elderly or disabled users for assisted walking, according to the Kano and QFD model, a four-wheeled rollator that meets the travel needs of the elderly are innovatively designed by TRIZ theory.
- At the same time, the radial basis function neural network (RBFNN) approximation-based trajectory tracking control system is created to realize the high safety conditions of the assistant elderly walker system.
- The comparative tracking performance using classical MPC and the proposed neural-based model predictive control (NMPC) method is discussed, presenting availability for the users to move carefully and stably.
The structure of this paper is as follows: Section 2 describes the novel industrial design for the Rollator combined with the Kano–TRIZ theory; Section 3 develops predictive tracking controller design of the rollator based on neural approximation; Experimental results and discussion are shown in Section 4; finally, the conclusions are presented in Section 5, and points for future discussion are discussed in Section 6.
2. Novel Industrial Design for the Rollator
This section mainly focuses on the four-wheeled rollator of the elderly to design a walking aid, combining the application methods and research results of TRIZ theory, Kano model theory, and QFD theory. Questionnaire survey, user interviews, and other research methods were used to obtain the user demand information of the walking aid of the elderly, and the Kano–QFD demand analysis part on the integrated model was used to analyze and transform the user demand [35,36,37].
2.1. Product Innovation Model
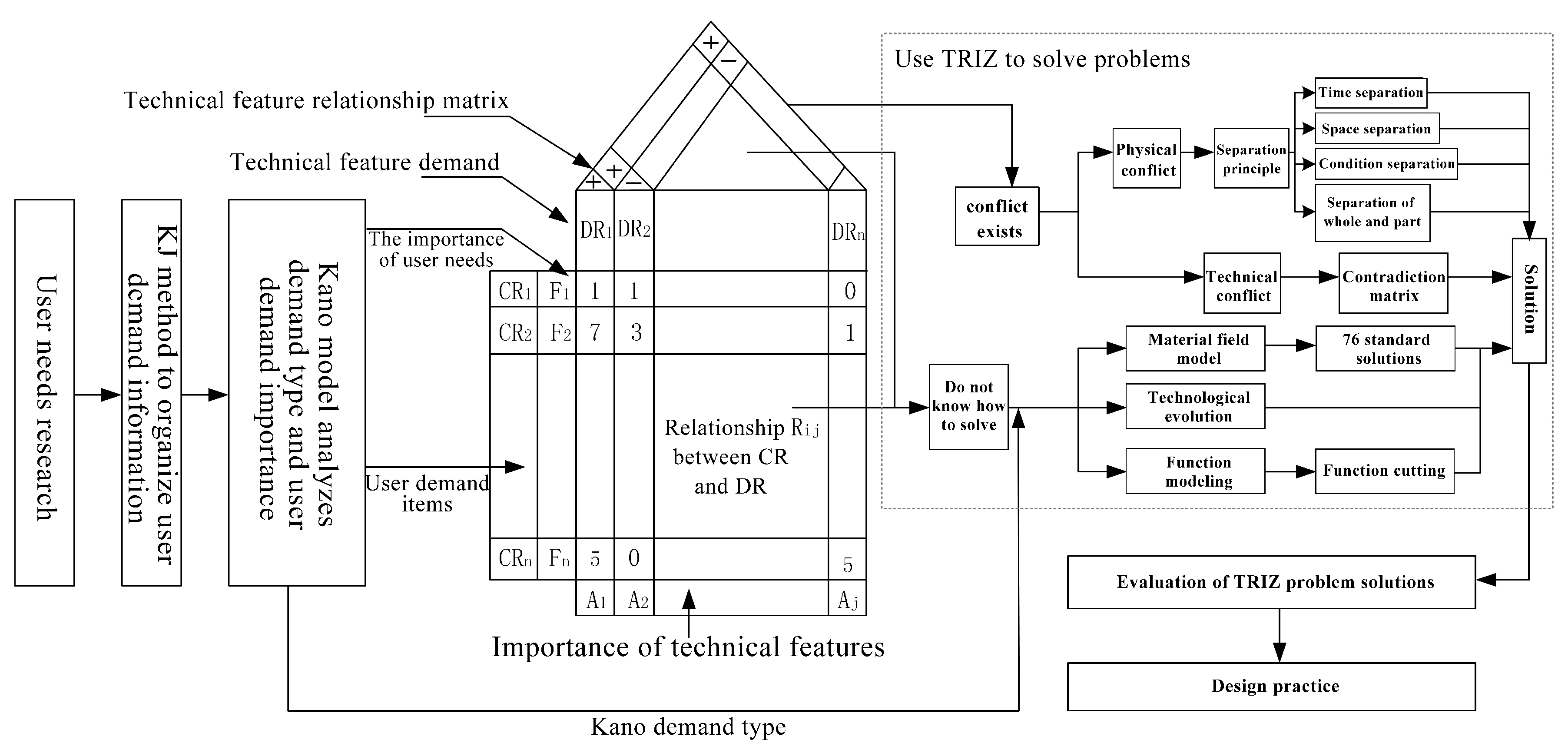
TRIZ theory is summarized in a large number of patents by Altshuller and is universal for innovation. When TRIZ solves the problem, it usually first converts the special product design problem that needs to be solved in the industry field into the TRIZ standard problem. Then, use the TRIZ tool to find a general solution corresponding to the TRIZ problem. Finally, the designer transforms the general solution into a design solution in the industry domain through an example analogy of industry domain knowledge [38,39]. The corresponding model of the product innovation process is based on the Kano–QFD–TRIZ combination is shown in Figure 1.
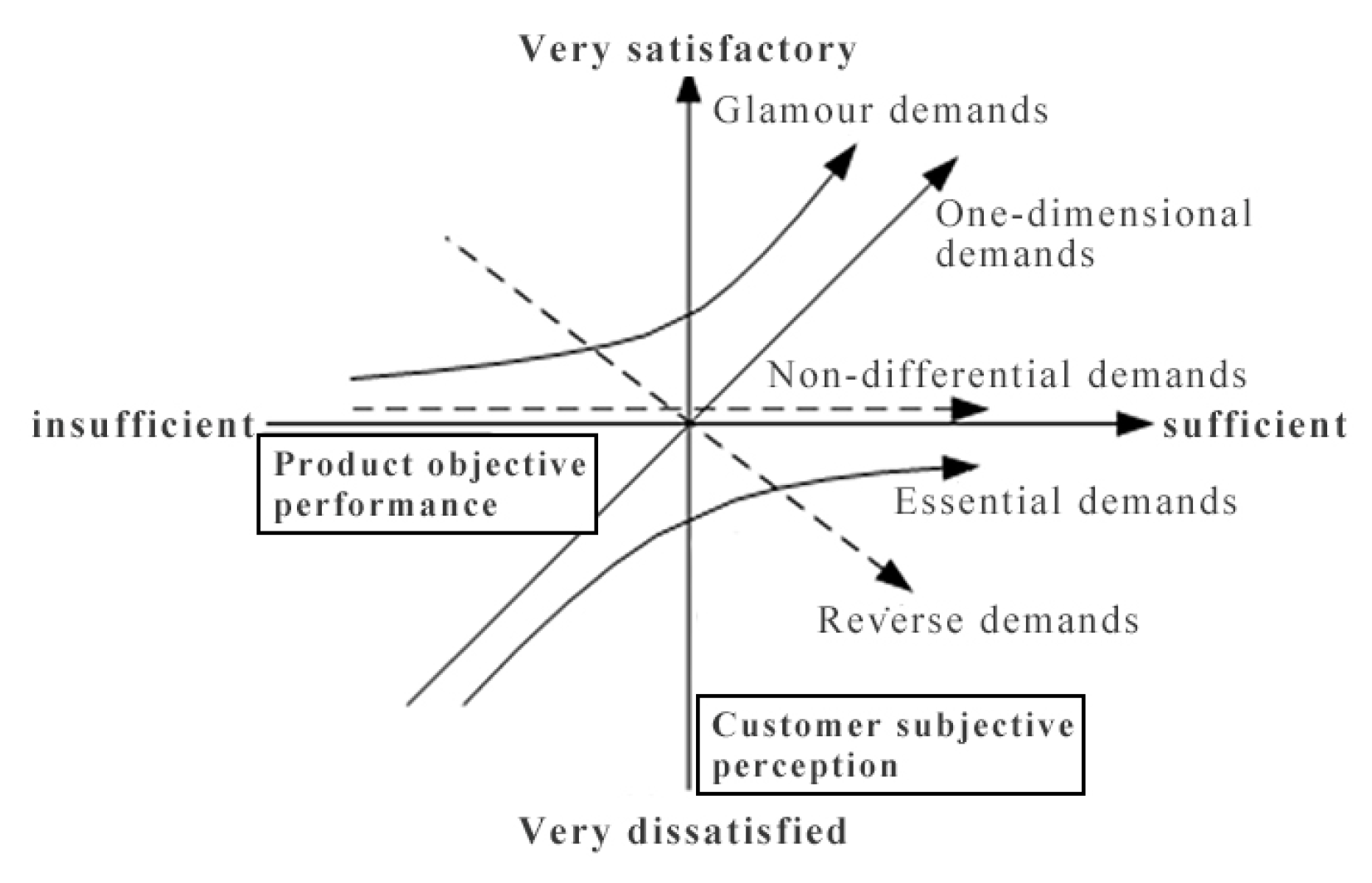
Japanese expert Noriaki Kano proposed the Kano model theory based on the two-dimensional cognitive model. The Kano model classifies the quality characteristics of a product or service into five categories: Attractive Quality, One-dimensional Quality, Basic Quality, Indifferent Quality, and Reverse Quality. The customer’s needs are met by product or service quality characteristics, so the Kano model’s division of the product’s quality characteristics can be equated with the product’s ability to meet customer demand levels and trends. Customer needs can also be divided into five types of requirements, as shown in Figure 2.
QFD is a user-driven product development method that uses a systematic and standardized approach to investigate and analyze user needs [40,41]. HOQ is a tool component that implements this method during product development. The first column on the left side of the quality house indicates the user’s needs; the second column on the left indicates the importance of user demand; the top horizontal layer represents technical features; the roof represents the relationship between technical features, namely the technical feature relationship matrix (sensitive matrix); the middle of the quality house represents the relationship between user needs and technical requirements, namely the relationship matrix (user demand and technical feature correlation matrix); and the bottom of the quality house indicates the relative importance of each technical measure, namely the importance of technical features [42].
This paper proposes a model of product innovation process based on Kano–QFD–TRIZ combination, and introduces user demand research and demand analysis in the early stage of the solution process; use the Kano model for requirements acquisition, classification, and screening requirements; through the Kano type of demand and the importance of technical features, select the corresponding TRIZ tools to solve the innovative solution. The specific process includes:
- User interviews such as interviews and observations to conduct the needs research.
- The Kano model for user needs analysis.
- A quality house to convert user needs into technical features.
- TRIZ tool to solve product innovation.
The demand function can be addressed as
where indicates the ultimate importance of the i-th user requirement; denotes the initial importance of demand; and is the adjustment factor.
The relationship between user satisfaction and product quality characteristics in the Kano model can be approximated by the quantitative function:
where is the current product satisfaction, and is the target user; is the demand satisfaction, and is the target demand connected with the Kano questionnaire.
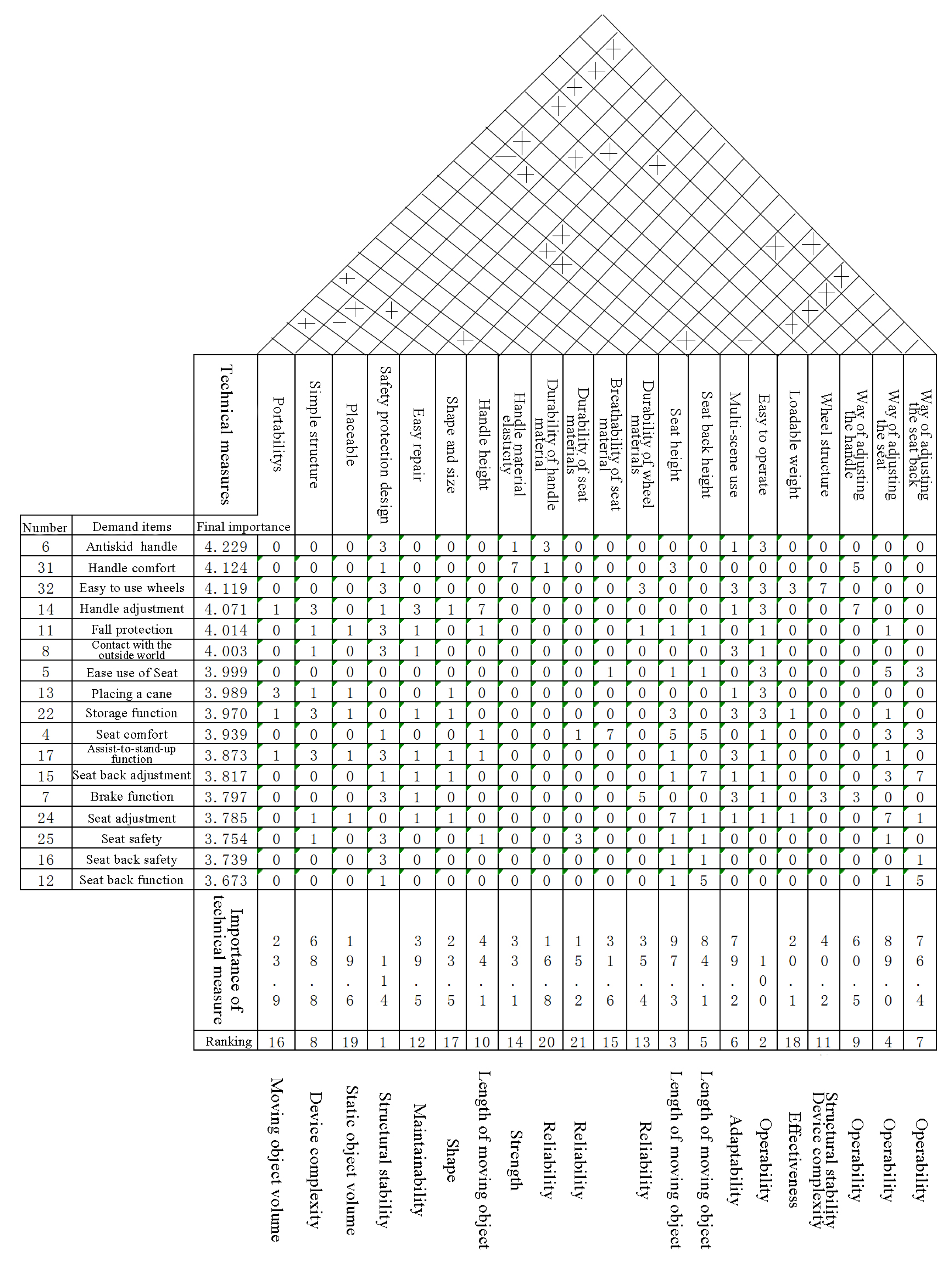
The most important step is to establish the house of quality (HOQ) to transform user needs into technical features. In the Kano model, the necessary requirements and one-dimensional requirements correspond to solving the problems existing in the current product, and the charm demand is the future problem of the product, that is, the development direction of the product. In the traditional product innovation design method, the internal technical characteristics of the product are contradictory. The method of solving the contradiction by the technicians is solved in a compromising manner, and only a part of the contradiction is solved, and the contradiction still exists. At present, the problem of products that are easy for users to identify is mostly caused by the designer’s compromise in the compromise of contradictory parameters. The 76 standard solutions are creative ways to resolve inherent contradictions in products. In the product design process, technical characteristics that are strongly related and important to the necessary or one-dimensional requirements, if the conflict cannot be found using HOQ, 76 standard solutions can be preferred to form a solution. Therefore, the HOQ model of the product innovation process is based on a Kano–QFD–TRIZ combination for the elderly four-wheeled rollator is displayed in Figure 3. The horizontal axis is marked with technical indicators. The magnitude of the value represents the importance of this indicator, and the bottom value denotes the importance ratio of the rollator requirement. In addition, the symbols on the HOQ roof, including “+”, “−” and “space”, indicate whether there is a conflict between each technical feature, no conflict, and no impact.
In addition, the details of Figure 3 about the HOQ are summarized as follows: first of all, QFD is a user-driven product development method that uses a systematic and standardized approach to investigate and analyze user needs. In particular, the HOQ is a tool component that implements this method during product development. In order to make more clear about the Figure 3, three steps of the TRIZ-Kano-QFD are discussed by questionnaire surveys and the target user interview. Based on the preliminary results, further user interviews were conducted, which consider the Kano model to obtain demand for the value of user needs. Finally, the QFD theory was applied to convert user needs into technical features: (1) classification and importance evaluation of demand attributes based on the Kano model are considered; (2) the demand transformation based on the QFD model is estimated; and, (3) according to user demands and technical characteristics obtained by QFD, HOQ technology is utilized to determine measure weights and design conflict. Satisfying the charm demand allows users to maintain high satisfaction with the product, and the charm demand corresponds to the future development of the product. TRIZ technology evolution theory can be used to study the life cycle position of products and the past development process of product technology systems, and then explore the future development direction of product technology systems. Comprehensive use of the future development direction of the technology system to predict new product features can keep the product iteratively updated at all times [43]. Using TRIZ technology evolution theory to solve the technical characteristics of strong correlation, high importance, and no conflicts related to the glamour demand can make the product beneficial to the invincible.
2.2. The Mechanical Design of Elderly Rollator Based on an Industrial Innovation Method
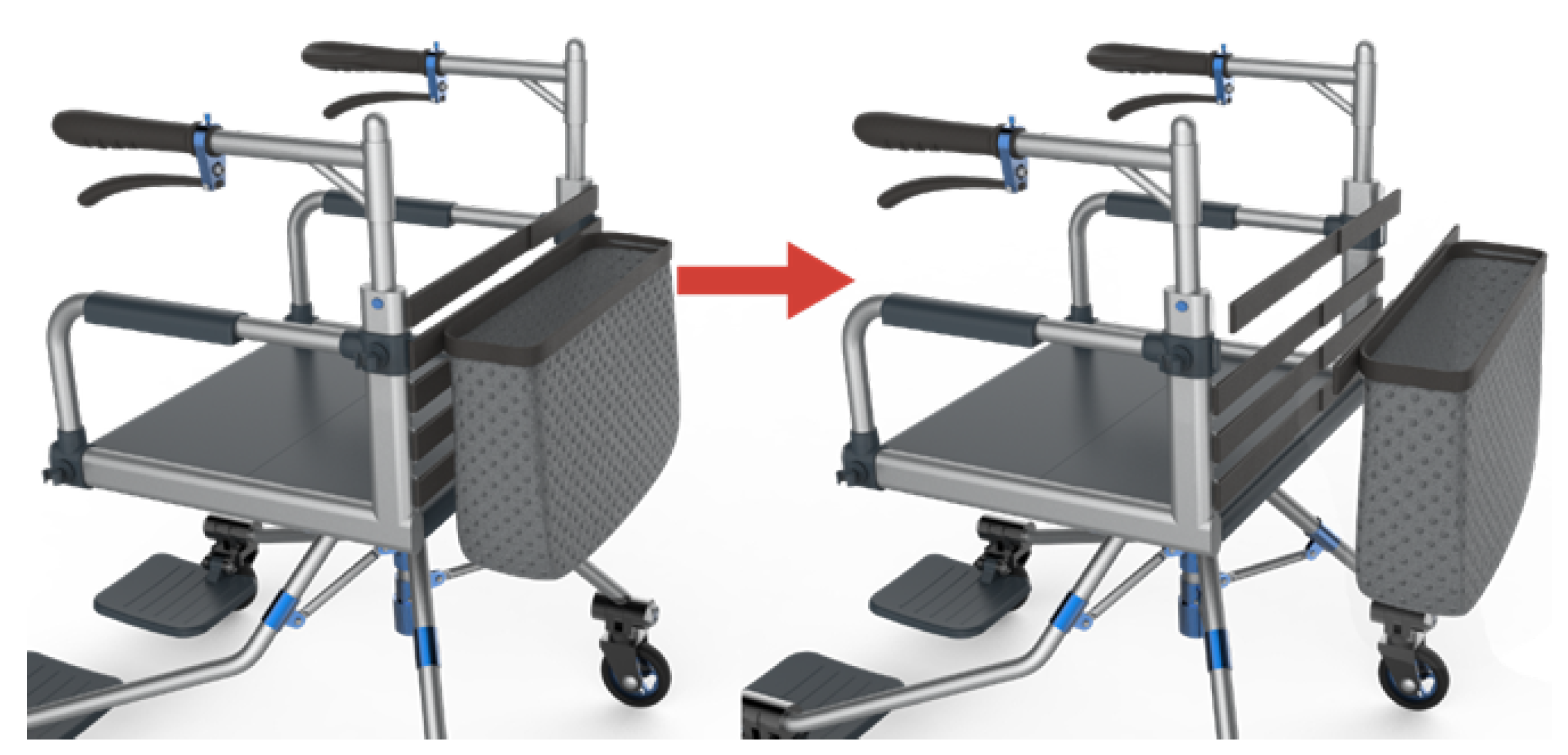
According to the previous analysis of the problem conflict points, technical characteristics and requirements, the Kano type selects the corresponding TRIZ tool to analyze the problem solution and apply the problem solution to the design practice of the four-wheel unpowered walker. At the same time, the design elements and man-machine size of the walker product were analyzed to obtain the final product design [44,45]. Finally, through the sketch and computer-assisted expression, the structure, details, and the color of the product are refined, and the product drawing is completed through the rendering. Thus, the specific mechanical structure of the four-wheeled rollator is shown in Figure 4. The flexible mechanical structure makes the walker more adaptable. For example, in the assisted walking state, the user can push the rollator to walk, so the handle of the rollator must be in the same direction as the seat. At the same time, to support the user with enough space for movement and avoid restrictions on seats, the seats and foot pedals have a retractable capacity, which is convenient for users to walk.
Figure 5 and Figure 6 exhibit the details of the four-wheeled rollator. The seat height adjustment structure draws on the umbrella frame structure, and there are two upper and lower adjustment knobs, four connecting frames, and a central axis. Adjust the height setting by changing the position of the skeleton and the central axis. The skeletal connection depends on the four support feet to change the height of the user seat, which is created to be rotatable to accommodate both the assisted walk and the wheelchair. In addition, three fixed positions are examined, such as forward direction, 45 degrees direction, and reverse direction.
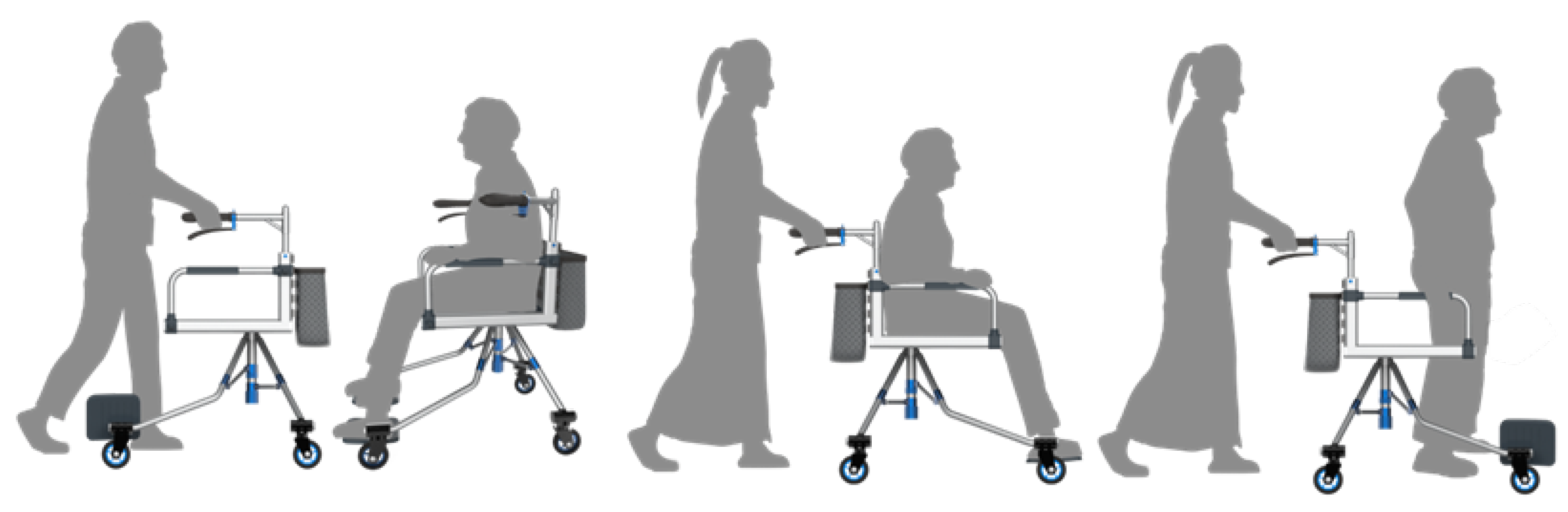
The height of the walking aid handle can be adjusted, and six adjustment card positions are designed, corresponding to the handle height of the walking aid: 820 mm, 881 mm, 942 mm, 1003 mm, 1064 mm, and 1125 mm. The seat-back is composed of a plurality of backrest strips, and the ends of the backrest strip are velcro for easy installation and disassembly. Five slots are provided on the walking aid frame, and the backrest strips are tightened through the slots to form a backrest. A storage bag and one of the backrest strips are connected to form a detachable storage bag. There are three usage states for the developed rollator system, including the assisting the walking situation, serving in walking the rest, and the wheelchair with the partner pushing, as displayed in Figure 7.
The rollator is intended to three usage states for the use scene: assisting the walking situation, serving in walking the rest, and the wheelchair with the partner pushing.
3. Predictive Controller Design of the Rollator Based on Neural Approximation
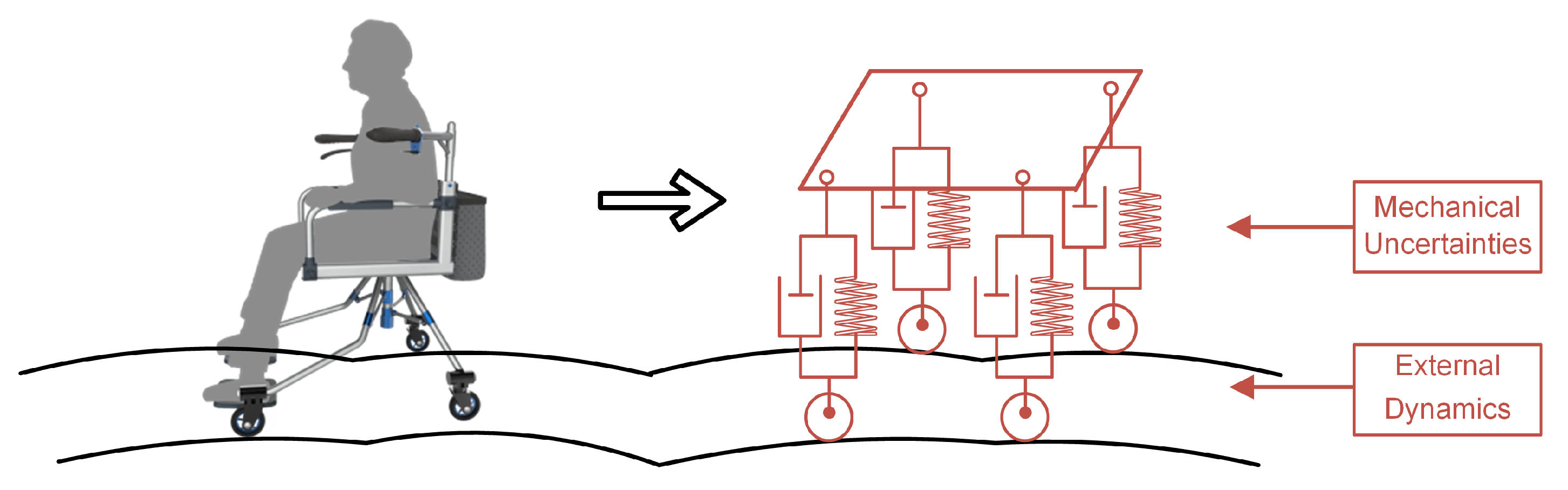
In this article, uncertainties in rollator systems we considered can be separated into two sections, namely internal interaction and external uncertainty, as exhibited in Figure 8. The former mainly involves the situation where the parameters such as quantity and rotational inertia of the mechanical system are unknown, while the following mainly belongs to some unmodeled dynamics such as external disturbance and friction. When it comes to the rollator operating system of the developed rollator for tracking control, it is essential to consider the model nonlinearity and external interaction, such as structure parameter, load transfer, and uneven terrain.
It is fundamental to estimate the autonomous tracking control of the auxiliary driving system to satisfy the essential security requirement in practical engineering rollator systems. In this section, an NMPC tracking controller of the four-wheel rollator is carried out to track a desired trajectory while considering the static and dynamic restrictions in the uncertain dynamics and the physical interaction [46,47].
3.1. Neural Approximation
In this chapter, we want to solve the challenge we mentioned before, which is the static and dynamic restrictions in the uncertain dynamics and the physical interaction for the rollator system safety control. To overcome this challenge of the safety risks in rollator operation [48,49], an RBFNN-based control scheme is carried out on the elderly walker system under bounded disturbances and unknown dynamics. Design a constant smooth function connected to the approximation capability, in which the RBFNN control scheme is utilized to evaluate the uncertain dynamics such as the load friction and mechanism structure [50,51,52]:
where represents the input of RBFNN; and are the activation function depended on Gaussian function; represents the weight in the hidden layer:
subjected to , and is the variance.
Then, the can be defined as
where is a positive constant.
Then, we can obtain the smooth continuous function as follows:
where is the desired parameter weight over a compact set , and .
Therefore, the weight vector can be redefined as
3.2. The State Model of the Elderly Rollator
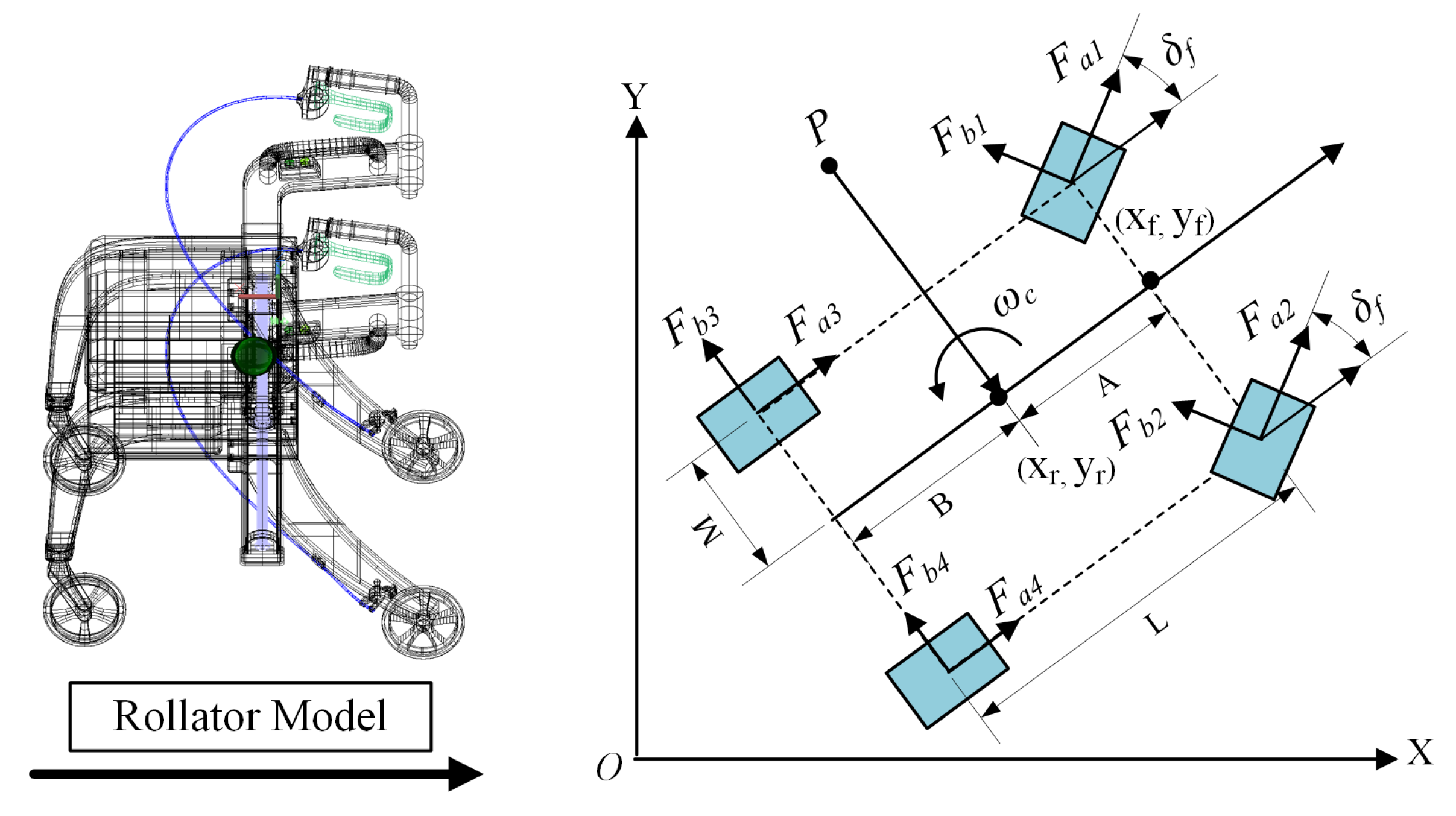
The kinematical model of the assisted elderly rollator is displayed in Figure 9. and denote the coordinate of the rear axis and front axis, respectively. and represent the steering angle and yaw angle, respectively. P denotes the circle center, R is the steering radius, and L and M represent the wheel track. In addition, the speed of the rear and front are the and , respectively.
Considering the same conditions of the steering radius and road curvature [47], we can obtain the rear wheel speed as
Then, we can obtain the kinematic model of the assistant system as:
According to Equation (9), we can define:
According to the steering relation of the rollator, we can achieve the rollator state function as
Meanwhile, the following yaw angular velocity can be described as:
Thus, the trajectory tracking control of the assistant walker system can be represented as:
where is the system state and is the control state.
To further address the dynamic model of the proposed rollator system, according to the [53,54,55], the rollator dynamic model is as follows:
where , , and are the wheel force of left front, right front, left rear and right front, respectively, in the direction. is the rotational inertia and the center yaw velocity.
In order to calculate the lateral force of the tire, the following assumptions can be addressed as:
where and are tire cornering angle, and are cornering stiffness, and is the slip angle.
At the same time, to manage stable tracking control, the slip ratio of the rollator should be constrained as
We assume that the system state is and , then the tire function can be transformed as:
3.3. Predictive Controller Development
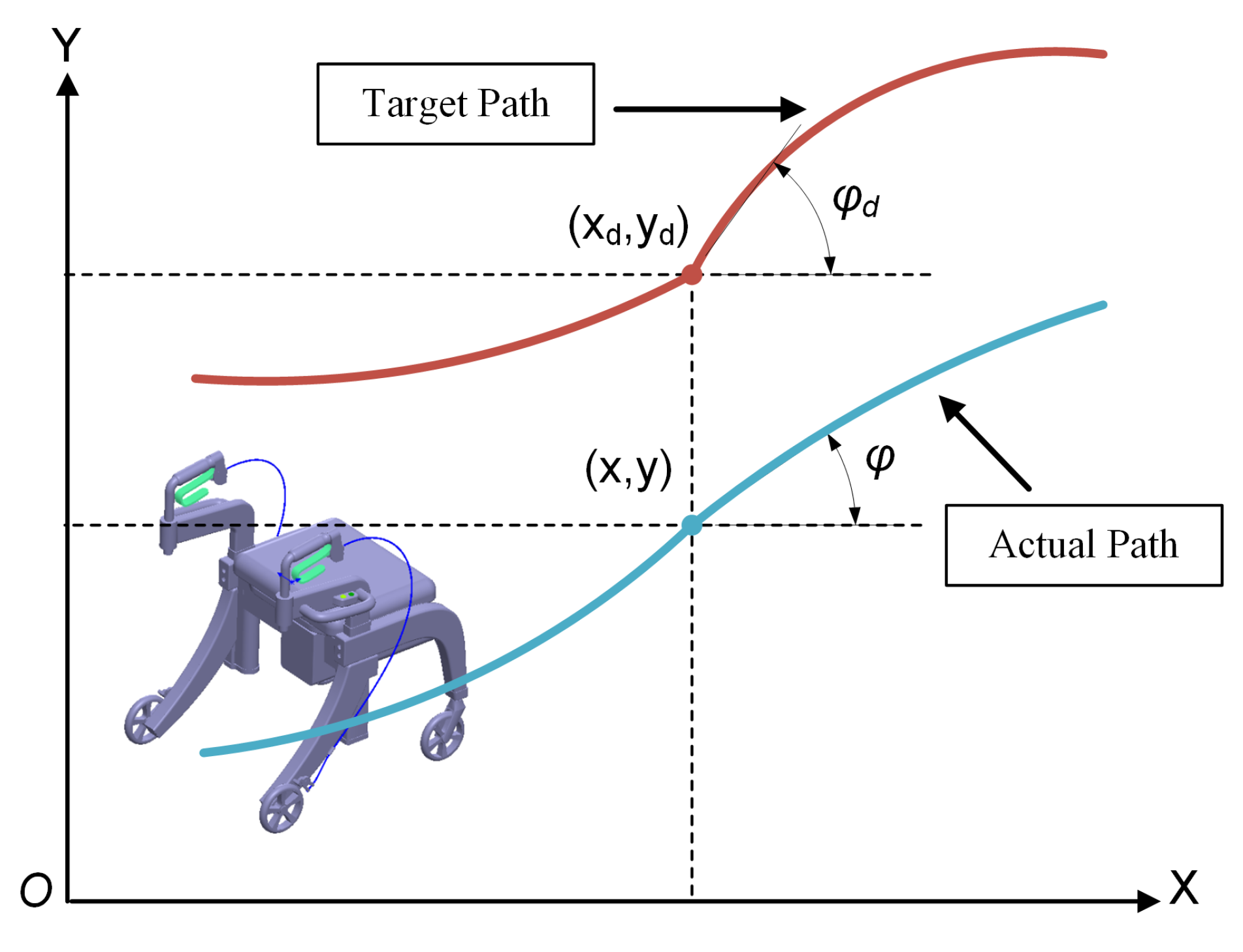
The tracking error displayed in Figure 10 can be addressed as
To transfer the error function, the model can be discretized as:
Among them, and T is the sampling time.
To effectively grasp the desired trajectory reliably and smoothly, it is essential to constrain the state error and control parameter:
where and are weighting factors; is the prediction horizon, and is the control horizon.
Considering the safety and stability of the rollator [56,57], it is necessary to restrict the control limit and control increment, as follows:
where . The control horizon can be applied as:
In addition, the actual control input increment can be presented as
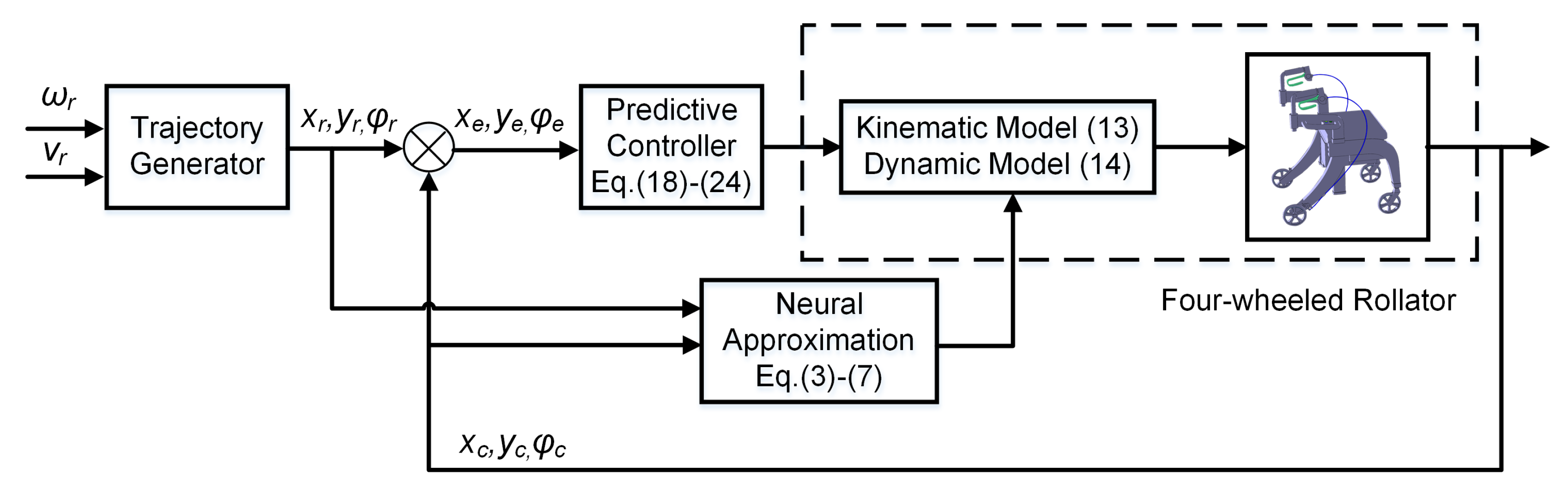
Therefore, the neural approximation based predictive controller framework of four-wheeled rollator for trajectory tracking is displayed in Figure 11.
4. Results and Discussion
In order to demonstrate the effectiveness of the proposed position tracking controller, path tracking experiments, compared with previous work [35,58,59], are carried out on the developed four-wheeled elderly rollator using simulation [51,60]. Two groups of comparative experiments are discussed as follows:
- Trajectory tracking co-simulation of the elderly rollator, including straight lines, curves, and obstacles, is intended to illustrate the position accuracy and robustness of the proposed NMPC algorithm.
- To further demonstrate the advantage of NMPC in uncertain disturbances for the assistive elderly walker, including internal mechanical friction and external rollator and human interaction forces, a contrast experiment using NMPC and MPC related to previous work [35], is discussed for the circular path.
The main experiment parameter setting are as follows: robot speed , prediction horizon control horizon weight coefficient sample time T = 0.025 s, interference signal of sine curve and period s.
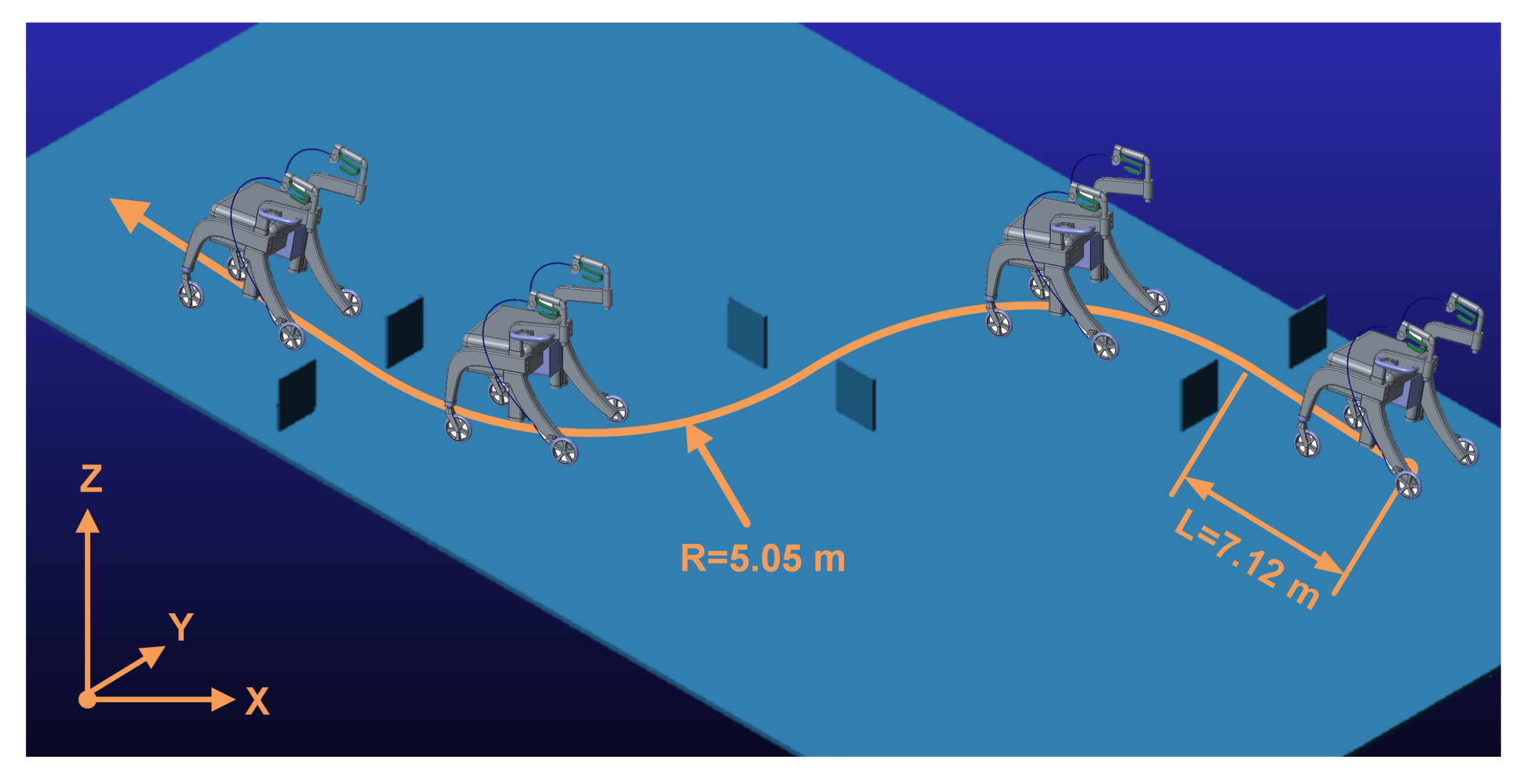
The tracking performance of task 1 is shown in Figure 12. The desired trajectory is mainly composed of the straight path with 7.12 m, the circular arc with a radius of 5.05 m, and three obstacles with narrow aisles. The width of the obstacle is only 4 cm wider than the rollator body, so as to demonstrate the accuracy of the NMPC control method. Set the elderly rollator to advance at a uniform speed of 1 m/s, and pass the trajectory of straight, arcs, and obstacles in sequence.
It can be inferred from the tracking events displayed in Figure 13 that the elderly rollator using the proposed NMPC method can follow the mentioning path properly, and the elderly rollator responds smoothly with a lateral error around meters and a longitudinal error within . Both the lateral position and the longitudinal position are capable of tracking the reference way, whether in straight or curve sections. Furthermore, the pitch angle is constrained in a reasonable range, and the rollator velocity is constant, revealing that the rollator reply of accuracy and frequency matchees the fast real-time in an assistant rollator system. In addition, the developed NMPC algorithm can accurately pass through the uncertain disturbances of narrow aisles (7.5 s, 15.8 s, 24.2 s), and the proposed control scheme can achieve a satisfactory performance with high accuracy and respond quickly in trajectory tracking performances, indicating that the NMPC algorithm can achieve a satisfactory performance with high accuracy and respond quickly in tracking performances.
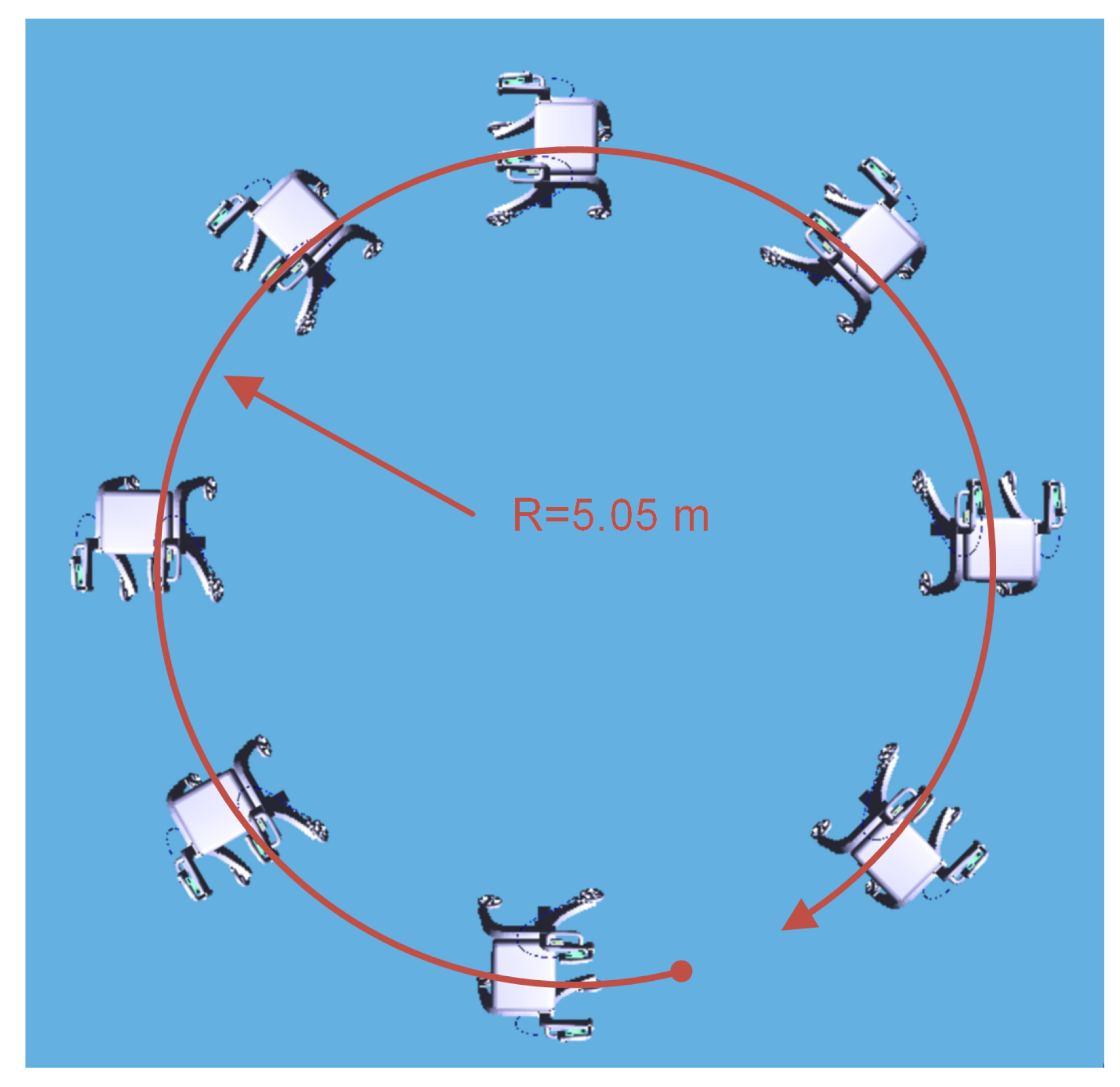
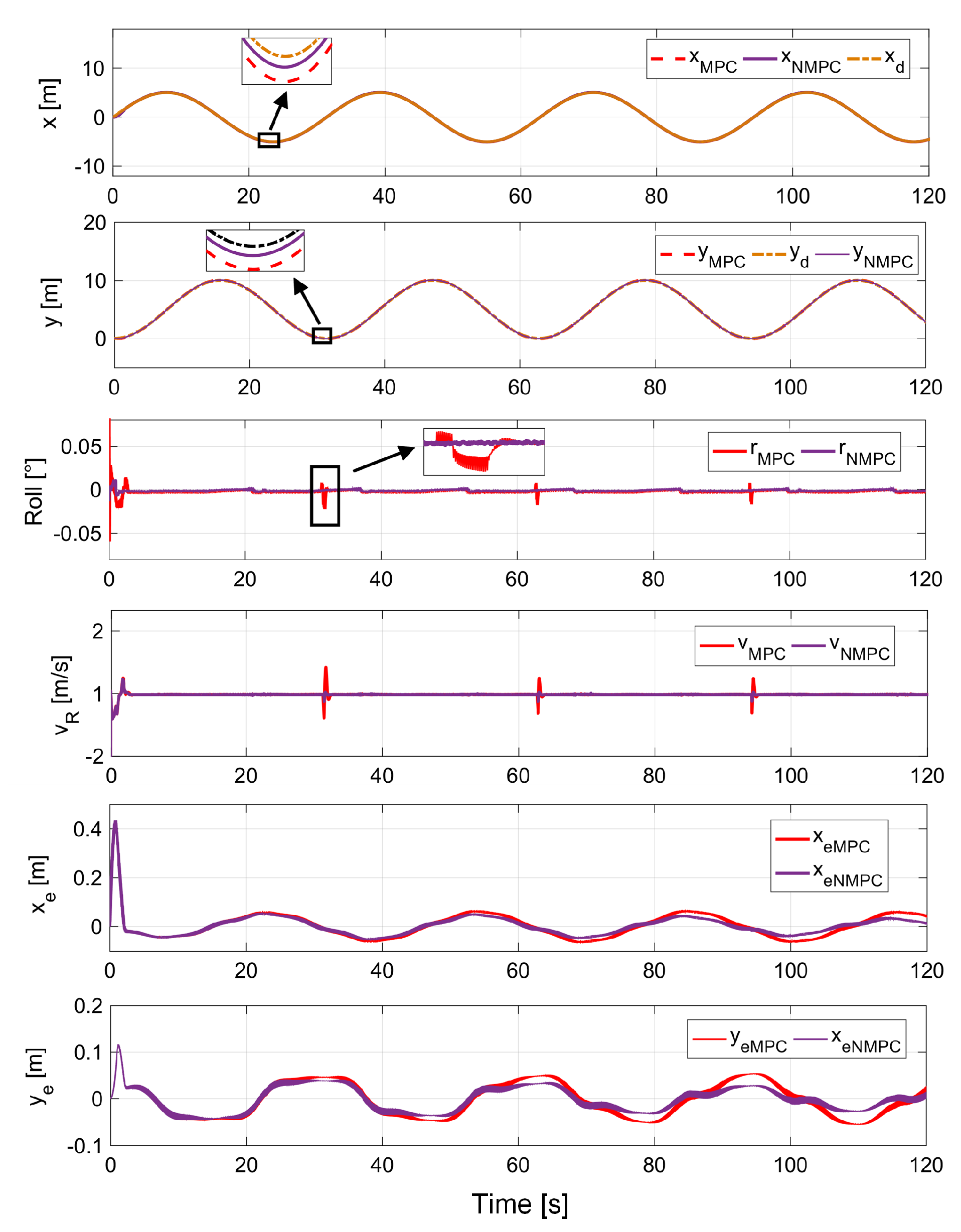
Moreover, to demonstrate the advantage of the NMPC approach in uncertain physical interaction, and compared with previous work [35], a circular tracking simulation is implemented with the method of MPC and NMPC. The tracking performance under the dynamic disturbance with sinusoid input is displayed in Figure 14, and the comparative results of NMPC and MPC in a longitudinal position, lateral position, roll angle, rollator speed, and the position error of longitude and lateral.
It can be gathered that both the rollator using NMPC and MPC approach can basically follow the desired trajectory in the lateral position and longitudinal position as displayed in Figure 15. However, from the speed respond of the rollator, there is some fluctuation in the tracking procession using the MPC method, obviously, while the NMPC approach can effectively maintain the stable speed. Furthermore, the rollator operation of the NMPC method can be constrained to track the desired trajectory with the continually decreasing error variation in the lateral position and longitudinal position affected by the dynamic disturbance with sinusoid input, while the tracking error of MPC scheme is slowly increasing. The lateral error of NMPC is efficiently controlled within m, which means that, in the case of external interference and uncertain dynamics, the NMPC can obtain the higher control accurately, and the tracking error is gradually reduced. In addition, the method of NMPC can maintain a smaller roll angle compared with the MPC method, revealing that the NMPC is more suitable to perform rollator stability in the case of uncertain dynamics.
Depending on the tracking performance obtained, we can understand that the RBFNN approximation can be adequately compensated for the internal interference and external uncertainty of the rollator system. The proposed algorithm NMPC has higher position control accuracy than the MPC discussed in [35], particularly in being more highly precise and smoother in position error. Therefore, the presented algorithm can not only supervise the theoretical design of the elderly rollator system, but also can be applied to practical engineering applications.
5. Conclusions
In order to promote the advancement and improvement of the medical rehabilitation equipment for the elderly or disabled users, this article presents a novel design and autonomous tracking control scheme for facilitating and strengthening weakened mobility. Firstly, by studying the Kano model and QFD theory to analyze the user needs to find the opportunity points of the specific design, we solve the relatively ambiguous problem of “what to do” in the TRIZ tool. At the same time, use the quality of the QFD theory (HOQ) and the Kano type of demand as the entry point to choose the TRIZ tool to solve the problem. Through the design practice of the unpowered walking aid, the feasibility of the theoretical model is tested, which provides a reference and theoretical basis for the enterprise in the process of product innovation. On the other hand, the proposed NMPC control scheme can achieve high safety requirements of the assistant elder rollator. This control approach is developed to determine the high accuracy of autonomous trajectory tracking. Finally, the experimental performances have confirmed the effectiveness of the suggested method on the practical rollator system.
6. Points for Future Discussion
The assistive rollator system we developed for the elderly rehabilitation and disabled users is currently being considered to be industrialized in China and some European countries, implementing convenience for the users to walk and to run safely.
How to develop an elderly rollator with a standard concept is a prerequisite. Rollators for the disabled and rehabilitation patients occupy a significant market, and the demand for elderly walkers caused by the aging society has not been satisfied. In the traditional product innovation method, the technical personnel usually solve the contradiction in a compromised manner for the existing conflicting internal technical characteristics of the product. However, this method does not solve the actual needs of elderly mobility vehicles, which limit the performance of the product. However, the TRIZ theory is a systematic and creative innovation method.
How to combine the concepts of TRIZ, QFD, and Kano to design a walker is the main work. In this paper, TRIZ is used to solve the technical characteristics of the product, the user needs obtaining through surveys, and the types of requirements analyzed using the Kano model. At the same time, the Kano model only analyzes the shortcomings of user needs. The House of Quality (HOQ) in QFD is a useful tool for converting customer needs into design requirements. In this way, the technical needs and user needs can be well combined to design a mobility product that meets the physical and mental health of the elderly.
How to improve the safety assistance system of the rollator equipment is the challenge. As medical devices, elderly mobility aid has extremely critical security conditions. There is an unknown disturbance in the process of the rollator operation, such as uneven terrain, the uncertain mechanism, etc.. Meanwhile, in our previous work, we discussed the autonomous tracking control of a four-wheel rollator, but this study did not consider dynamic interference. Based on this, in this article, we manage to develop the controller to improve the safety and stability under uncertain physical interaction.
Finally, the elderly mobility aid is medical rehabilitation equipment, and it is an essential tool for the disabled and the elderly to travel. Future work, including the design of mechanical structures, control systems, human–robot interaction, and intelligent control, will be considered to enhance the design of walking vehicles further.
Author Contributions
Conceptualization, J.L. and X.Z.; Data curation, K.F. and Z.C.; Formal analysis, Z.H.; Investigation, Z.C. and Z.H.; Methodology, J.L. and X.Z.; Project administration, J.L. and X.Z.; Software, K.F. and Z.C.; Supervision, X.Z. and Y.Y.; Validation, K.F.; Writing—original draft, J.L. and X.Z.; Writing—review editing, J.L. and X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research is supported by Chinese Scholarship Council under Grant: 201906030066.
Conflicts of Interest
The authors declare no conflict of interest in the collection, analyses or in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| MPC | Model Predictive Control |
| RBFNN | Radial Basis Function Neural Network |
| TRIZ | Theory of Inventive Problem Solving |
| QFD | Quality Function Deployment |
| HOQ | House of Quality |
| PID | Proportion Integration Differentiation |
References
- Li, Z.; Xiao, S.; Ge, S.S.; Su, H. Constrained multilegged robot system modeling and fuzzy control with uncertain kinematics and dynamics incorporating foot force optimization. IEEE Trans. Syst. Man Cybern. Syst. 2015, 46, 1–15. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.Y.; Li, G.; Su, H. Fuzzy approximation-based adaptive backstepping control of an exoskeleton for human upper limbs. IEEE Trans. Fuzzy Syst. 2014, 23, 555–566. [Google Scholar] [CrossRef]
- Xu, Y.; Li, J.; Gao, Q.; Yu, L.; Xu, W.; Li, F. Paralleling voltage oscillation forecast method of energy device based on hysteresis curve equation. J. Eng. 2019. [Google Scholar] [CrossRef]
- Su, H.; Yang, C.; Ferrigno, G.; De Momi, E. Improved Human–Robot Collaborative Control of Redundant Robot for Teleoperated Minimally Invasive Surgery. IEEE Robot. Autom. Lett. 2019, 4, 1447–1453. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Huang, B.; Ye, Z.; Deng, M.; Yang, C. Physical Human–Robot Interaction of a Robotic Exoskeleton By Admittance Control. IEEE Trans. Ind. Electron. 2018, 65, 9614–9624. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Li, Z.; Li, G.; Yang, C. EMG-Based neural network control of an upper-limb power-assist exoskeleton robot. In International Symposium on Neural Networks; Springer: Berlin, Germany, 2013; pp. 204–211. [Google Scholar]
- Su, H.; Sandoval, J.; Makhdoomi, M.; Ferrigno, G.; De Momi, E. Safety-enhanced human-robot interaction control of redundant robot for teleoperated minimally invasive surgery. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6611–6616. [Google Scholar]
- Shi, D.; Guo, Z.; Johansson, K.H.; Shi, L. Causality countermeasures for anomaly detection in cyber-physical systems. IEEE Trans. Autom. Control 2017, 63, 386–401. [Google Scholar] [CrossRef]
- Mann, D. Hands on Systematic Innovation; Citeseer: Kyoto, Japan, 2002. [Google Scholar]
- Hu, M.; Yang, K.; Taguchi, S. Enhancing robust design with the aid of TRIZ and axiomatic design (Part I). In TRIZ Journal, October; Citeseer: Princeton, NJ, USA, 2000. [Google Scholar]
- Borgianni, Y.; Matt, D.T. Axiomatic Design and TRIZ: Deficiencies of their Integrated Use and Future Opportunities. Procedia CIRP 2015, 34, 1–6. [Google Scholar] [CrossRef]
- Lee, C.H.; Wang, Y.H.; Trappey, A.J. Service design for intelligent parking based on theory of inventive problem solving and service blueprint. Adv. Eng. Inform. 2015, 29, 295–306. [Google Scholar] [CrossRef]
- Vinodh, S.; Kamala, V.; Jayakrishna, K. Integration of ECQFD, TRIZ, and AHP for innovative and sustainable product development. Appl. Math. Model. 2014, 38, 2758–2770. [Google Scholar] [CrossRef]
- Filippi, S.; Barattin, D. Exploiting TRIZ tools in interaction design. Procedia Eng. 2015, 131, 71–85. [Google Scholar] [CrossRef] [Green Version]
- Pokhrel, C.; Cruz, C.; Ramirez, Y.; Kraslawski, A. Adaptation of TRIZ contradiction matrix for solving problems in process engineering. Chem. Eng. Res. Des. 2015, 103, 3–10. [Google Scholar] [CrossRef]
- Van Pelt, A.; Hey, J. Using TRIZ and human-centered design for consumer product development. Procedia Eng. 2011, 9, 688–693. [Google Scholar] [CrossRef]
- Hoang, M.C.; Le, V.H.; Kim, J.; Choi, E.; Kang, B.; Park, J.O.; Kim, C.S. Untethered robotic motion and rotating blade mechanism for actively locomotive biopsy capsule endoscope. IEEE Access 2019, 7, 93364–93374. [Google Scholar] [CrossRef]
- Hu, Y.; Li, Z.; Li, G.; Yuan, P.; Yang, C.; Song, R. Development of sensory-motor fusion-based manipulation and grasping control for a robotic hand-eye system. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 1169–1180. [Google Scholar] [CrossRef]
- Wu, X.; Li, Z. Cooperative Manipulation of Wearable Dual-Arm Exoskeletons Using Force Communication Between Partners. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Yang, J.; Su, H.; Li, Z.; Ao, D.; Song, R. Adaptive control with a fuzzy tuner for cable-based rehabilitation robot. Int. J. Control Autom. Syst. 2016, 14, 865–875. [Google Scholar] [CrossRef]
- Li, Z.; Huang, B.; Ajoudani, A.; Yang, C.; Su, C.Y.; Bicchi, A. Asymmetric bimanual control of dual-arm exoskeletons for human-cooperative manipulations. IEEE Trans. Robot. 2017, 34, 264–271. [Google Scholar] [CrossRef]
- Su, H.; Qi, W.; Hu, Y.; Sandoval, J.; Zhang, L.; Schmirander, Y.; Chen, G.; Aliverti, A.; Knoll, A.; Ferrigno, G.; et al. Towards Model-Free Tool Dynamic Identification and Calibration Using Multi-Layer Neural Network. Sensors 2019, 19, 3636. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Li, Z.; Kan, Z.; Gao, H. Reference Trajectory Reshaping Optimization and Control of Robotic Exoskeletons for Human-Robot Co-Manipulation. IEEE Trans. Cybern. 2019. [Google Scholar] [CrossRef]
- Shi, D.; Deshpande, S.; Dassau, E.; Doyle, F.J., III. Feedback control algorithms for automated glucose management in T1DM: the state of the art. In The Artificial Pancreas; Elsevier: Amsterdam, The Netherlands, 2019; pp. 1–27. [Google Scholar]
- Li, Z.; Yuan, Y.; Luo, L.; Su, W.; Zhao, K.; Xu, C.; Huang, J.; Pi, M. Hybrid brain/muscle signals powered wearable walking exoskeleton enhancing motor ability in climbing stairs activity. IEEE Trans. Med. Robot. Bionics 2019. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Ma, L.; Zong, G. Fuzzy-approximation-based asymptotic tracking control for a class of uncertain switched nonlinear systems. IEEE Trans. Fuzzy Syst. 2019. [Google Scholar] [CrossRef]
- Lin, G.; Li, Z.; Liu, L.; Su, H.; Ye, W. Development of multi-fingered dexterous hand for grasping manipulation. Sci. China Inf. Sci. 2014, 57, 1–10. [Google Scholar] [CrossRef]
- Han, G.; Fu, W.; Wang, W.; Wu, Z. The lateral tracking control for the intelligent vehicle based on adaptive PID neural network. Sensors 2017, 17, 1244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Wang, C.; Zhou, L.; Ou, L. A simulation of vehicle lateral stability based on fuzzy PID control. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; Volume 2, pp. 194–199. [Google Scholar]
- Guo, J.; Li, L.; Li, K.; Wang, R. An adaptive fuzzy-sliding lateral control strategy of automated vehicles based on vision navigation. Veh. Syst. Dyn. 2013, 51, 1502–1517. [Google Scholar] [CrossRef]
- Zhao, S.; Li, Y.; Zheng, L.; Lu, S. Vehicle lateral stability control based on sliding mode control. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 638–642. [Google Scholar]
- Grondin, S.L.; Li, Q. Intelligent control of a smart walker and its performance evaluation. In Proceedings of the 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013; pp. 1–6. [Google Scholar]
- Tung, J.Y.; Gage, W.H.; Poupart, P.; McIlroy, W.E. Upper limb contributions to frontal plane balance control in rollator-assisted walking. Assist. Technol. 2014, 26, 15–21. [Google Scholar] [CrossRef]
- Alkjær, T.; Larsen, P.K.; Pedersen, G.; Nielsen, L.H.; Simonsen, E.B. Biomechanical analysis of rollator walking. Biomed. Eng. Online 2006, 5, 2. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Li, J.; Hu, Z.; Qi, W.; Zhang, L.; Hu, Y.; Su, H.; Ferrigno, G.; Momi, E.D. Novel Design and Lateral Stability Tracking Control of a Four-Wheeled Rollator. Appl. Sci. 2019, 9, 2327. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Su, H.; Zhang, L.; Miao, S.; Chen, G.; Knoll, A. Nonlinear Model Predictive Control for Mobile Robot Using Varying-Parameter Convergent Differential Neural Network. Robotics 2019, 8, 64. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Nguyen, P.B.; Kang, B.; Choi, E.; Park, J.O.; Kim, C.S. A novel tip-positioning control of a magnetically steerable guidewire in sharply curved blood vessel for percutaneous coronary intervention. Int. J. Control Autom. Syst. 2019, 17, 2069–2082. [Google Scholar] [CrossRef]
- Koumpouros, Y.; Karavasili, A.; Efthimiou, E.; Fotinea, S.E.; Goulas, T.; Vacalopoulou, A. User Evaluation of the MOBOT rollator type robotic mobility assistive device. Technologies 2017, 5, 73. [Google Scholar] [CrossRef] [Green Version]
- Papageorgiou, X.S.; Tzafestas, C.S.; Maragos, P.; Pavlakos, G.; Chalvatzaki, G.; Moustris, G.; Kokkinos, I.; Peer, A.; Stanczyk, B.; Fotinea, E.S.; et al. Advances in intelligent mobility assistance robot integrating multimodal sensory processing. In International Conference on Universal Access in Human-Computer Interaction; Springer: Cham, Switzerland, 2014; pp. 692–703. [Google Scholar]
- Li, Z.; Li, J.; Zhao, S.; Yuan, Y.; Kang, Y.; Chen, C.P. Adaptive neural control of a kinematically redundant exoskeleton robot using brain-machine interfaces. IEEE Trans. Neural Netw. Learn. Syst. 2018. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Yang, C.; Su, H.; Liu, C. A Robot Learning Method with Physiological Interface for Teleoperation Systems. Appl. Sci. 2019, 9, 2099. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Ferrigno, G.; De Momi, E. Adaptive decoupling control of a serial redundant robot for teleoperated minimally invasive surgery. In IEEE ICRA Workshop on Supervised Autonomy in Surgical Robotics; IEEE: Brisbane, Australia, 2018; pp. 1–6. [Google Scholar]
- Li, Z.; Xu, C.; Wei, Q.; Shi, C.; Su, C.Y. Human-Inspired Control of Dual-Arm Exoskeleton Robots With Force and Impedance Adaptation. IEEE Trans. Syst. Man Cybern. Syst. 2018. [Google Scholar] [CrossRef]
- Fotinea, S.E.; Efthimiou, E.; Koutsombogera, M.; Dimou, A.L.; Goulas, T.; Maragos, P.; Tzafestas, C. The MOBOT human-robot communication model. In Proceedings of the 2015 6th IEEE International Conference on Cognitive Infocommunications (CogInfoCom), Gyor, Hungary, 19–21 October 2015; pp. 201–206. [Google Scholar]
- Koumpouros, Y.; Toulias, T.L.; Koumpouros, N. The importance of patient engagement and the use of social media marketing in healthcare. Technol. Health Care 2015, 23, 495–507. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Deng, C.; Zhao, K. Human Cooperative Control of a Wearable Walking Exoskeleton for Enhancing Climbing Stair Activities. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef]
- Su, H.; Zhang, H.; Li, Z.; Su, C.Y. Adaptive fuzzy control of operation space constrained exoskeletons under unmodelled dynamics. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 3277–3282. [Google Scholar]
- Peng, G.; Yang, C.; He, W.; Chen, C.P. Force sensorless admittance control with neural learning for robots with actuator saturation. IEEE Trans. Ind. Electron. 2019. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Li, Z.; Yang, C. Adaptive neural network based variable stiffness control of uncertain robotic systems using disturbance observer. IEEE Trans. Ind. Electron. 2016, 64, 2236–2245. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Enayati, N.; Vantadori, L.; Spinoglio, A.; Ferrigno, G.; De Momi, E. Online human-like redundancy optimization for tele-operated anthropomorphic manipulators. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418814695. [Google Scholar] [CrossRef]
- Peng, H.; Wang, J.; Shen, W.; Shi, D. Cooperative attitude control for a wheel-legged robot. In Peer-to-Peer Networking and Applications; Springer: Berlin, Germany, 2019; pp. 1–12. [Google Scholar]
- Sandoval, J.; Su, H.; Vieyres, P.; Poisson, G.; Ferrigno, G.; De Momi, E. Collaborative framework for robot-assisted minimally invasive surgery using a 7-DOF anthropomorphic robot. Robot. Auton. Syst. 2018, 106, 95–106. [Google Scholar] [CrossRef] [Green Version]
- Gong, J.; Jiang, Y.; Xu, W. Model Predictive Control for Self-Driving Vehicles; Beijing Institute of Technology Press: Beijing, China, 2014. [Google Scholar]
- Jiang, L. Path tracking of automatic parking system based on sliding mode control. Trans. Chin. Soc. Agric. Mach. 2019, 50, 356–364. [Google Scholar]
- Shen, W.; Pan, Z.; Li, M.; Peng, H. A Lateral Control Method for Wheel-Footed Robot Based on Sliding Mode Control and Steering Prediction. IEEE Access 2018, 6, 58086–58095. [Google Scholar] [CrossRef]
- Li, Z.; Yang, C.; Su, C.Y.; Deng, J.; Zhang, W. Vision-based model predictive control for steering of a nonholonomic mobile robot. IEEE Trans. Control Syst. Technol. 2015, 24, 553–564. [Google Scholar] [CrossRef]
- Peng, H.; Wang, J.; Shen, W.; Shi, D.; Huang, Y. Compound control for energy management of the hybrid ultracapacitor-battery electric drive systems. Energy 2019, 175, 309–319. [Google Scholar] [CrossRef]
- Li, Z.; Xiao, H.; Yang, C.; Zhao, Y. Model Predictive Control of Nonholonomic Chained Systems Using General Projection Neural Networks Optimization. IEEE Trans. Syst. Man Cybern. Syst. 2015, 45, 1313–1321. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y.; Buckham, B. Trajectory Tracking Control of an Autonomous Underwater Vehicle Using Lyapunov-Based Model Predictive Control. IEEE Trans. Ind. Electron. 2018, 65, 5796–5805. [Google Scholar] [CrossRef]
- Hao, R.; Wang, J.; Zhao, J.; Wang, S. Observer-based robust control of 6-DOF parallel electrical manipulator with fast friction estimation. IEEE Trans. Autom. Sci. Eng. 2015, 13, 1399–1408. [Google Scholar] [CrossRef]
Figure 1.
Product innovation based on the Kano-QFD-TRIZ combination.

Figure 2.
Principle diagram of the Kano demand model.

Figure 3.
HOQ model of the elder rollator.

Figure 4.
Novel designed four-wheeled rollator (mm).

Figure 5.
The adjustment of height and handle.

Figure 6.
Flexible storage space.

Figure 7.
Specific application of the developed rollator.

Figure 8.
Uncertain physical interaction in the elderly rollator system.

Figure 9.
Model of the assistant elderly walker system.

Figure 10.
Trajectory tracking error.

Figure 11.
Controller framework of NMPC.

Figure 12.
The tracking results of NMPC.

Figure 13.
The tracking performances of the NMPC approach in lateral position, yaw angle, longitudinal position, rollator speed, lateral error, yaw error, longitudinal error, and pitch angle.
Figure 13.
The tracking performances of the NMPC approach in lateral position, yaw angle, longitudinal position, rollator speed, lateral error, yaw error, longitudinal error, and pitch angle.

Figure 14.
The comparative performances for tracking the circular path in MPC and NMPC.

Figure 15.
The comparative results of NMPC and MPC in longitudinal position, lateral position, roll angle, rollator velocity, longitudinal error, and lateral error.
Figure 15.
The comparative results of NMPC and MPC in longitudinal position, lateral position, roll angle, rollator velocity, longitudinal error, and lateral error.

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Zhang, X.; Li, J.; Fan, K.; Chen, Z.; Hu, Z.; Yu, Y. Neural Approximation Enhanced Predictive Tracking Control of a Novel Designed Four-Wheeled Rollator. Appl. Sci. 2020, 10, 125. https://doi.org/10.3390/app10010125
AMA Style
Zhang X, Li J, Fan K, Chen Z, Hu Z, Yu Y. Neural Approximation Enhanced Predictive Tracking Control of a Novel Designed Four-Wheeled Rollator. Applied Sciences. 2020; 10(1):125. https://doi.org/10.3390/app10010125
Chicago/Turabian StyleZhang, Xin, Jiehao Li, Ke Fan, Ziyang Chen, Zhenhuan Hu, and Yu Yu. 2020. "Neural Approximation Enhanced Predictive Tracking Control of a Novel Designed Four-Wheeled Rollator" Applied Sciences 10, no. 1: 125. https://doi.org/10.3390/app10010125
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.