1. Introduction
In recent years, constraints on limiting air pollution generated by aircraft increased dramatically. For example, the European project Flightpath 2050 [
1] aims at a reduction of 90% and 75% in
and
gas emissions, respectively. On the other hand, the aircraft market is becoming more and more competitive, so that aircraft having low operational cost are valued. As a consequence, extensive research is being carried out to reduce aircraft fuel consumption. Current design philosophies aim at reducing aircraft structural weight while maximizing aerodynamic efficiency. This approach often leads to the design of very flexible and highly loaded composite wings, with increased aspect ratio and complex shape. For such wings, aeroelastic deformations cannot be ignored as they can have a significant effect on the flight shape, hence the aerodynamic loading and efficiency of the wing. Aeroelasticity must therefore be integrated early in the aircraft design, typically in the preliminary stage, during which aero-structural design and optimization are performed. Since many design parameters and configurations are considered at this early stage, engineers usually select low-fidelity modeling to obtain results quickly. However, low fidelity aerodynamic models are linear, whereas most transport aircraft fly in the transonic regime, in which the flow is nonlinear. The objective of the present work is to assess the impact of the aerodynamic level of fidelity on steady aerodynamic and static aeroelastic computations typically performed in preliminary aircraft design.
Various comparison analyses have already been performed on rigid geometries. For example, Bhateley and Cox [
2], Verhoff and O’Neil [
3], and Rubbert and Saaris [
4] used transonic small disturbances and linear potential theory to compute transonic flows over fighter configurations, and compared their results to nonlinear potential modeling or experimental data. In particular, Verhoff and O’Neil already suggested to resort to multi-fidelity modeling to extend transonic prediction capabilities by combining panel methods to nonlinear potential solvers. Flores et al. [
5] compared full potential to Euler solvers using two-dimensional airfoils and showed that the nonlinear potential formulation was noticeably faster than the Euler formulation, for a similar accuracy in the integrated aerodynamic coefficients, as long as the shocks were weak. Klopfer and Nixon [
6] further showed that adding a non-isentropic correction to the full potential formulation greatly improved the results for strong shocks. Several authors, such as Le Balleur [
7], Melnik et al. [
8], and Van Muijden et al. [
9], also added an interactive boundary layer modeling capability to full potential solvers and were able to match experimental data. Validation of various full potential codes with respect to higher-fidelity data can be found in the survey work by Holst [
10]. Drela et al. [
11] , Potsdam [
12], and Aftosmis et al. [
13] also extended various Euler solvers with viscous-inviscid calculations. The latter compared their results to both Reynolds-Averaged Navier–Stokes computations and experimental data. Some authors also performed surveys to assess the capabilities and limitations of the different aforementioned aerodynamic levels of fidelity. For example, Jameson [
14], and more recently Johnson et al. [
15], regrouped and analyzed the comparison studies performed by various authors using different solvers. However, the computations are based on different geometries and are scattered across different years, which makes direct comparison difficult. Moreover, the emphasis is usually placed on model or methodology validation rather than on the tradeoff between accuracy and computational time. To the knowledge of the present authors, there still exists no systematic and extensive comparative studies of all major aerodynamic modeling methods for transonic flow on the same benchmarks.
Although engineers commonly use multi-fidelity [
16] or high-fidelity [
17,
18] aerodynamic modeling, even fewer comparative studies are available for static aeroelasticity computations. The most extensive one is probably the first Aeroelastic Prediction Workshop organized by the American Institute of Aeronautics and Astronautics in 2012 [
19,
20]. In this workshop, some authors, such as Romanelli et al. [
21] and Acar and Nikbay [
22], compared their results obtained with linear potential or Euler equations to experimental data. Particularly, Romanelli et al. observed noticeable discrepancies between wing deflections obtained using the doublet lattice method and the Euler formulation. However, the workshop placed the emphasis on obtaining representative data rather than on comparing the models. Navier–Stokes solvers were mainly used and computational costs were not always reported. An insight into the tradeoff between accuracy and computational time was given by Edwards and Malone [
23] for some models in the context of aeroelastic computations, and extensive comparisons were made by Schuster [
24] and Henshaw et al. [
25]. However, these works focus on unsteady aerodynamics and dynamic aeroelasticity. Again, to the best of the authors’ knowledge, there are still no systematic studies of the effect of the major transonic aerodynamic modeling methods on static aeroelastic predictions.
In the present work, the different models used in aircraft design, based on the linear and nonlinear potential equations as well as on the Euler and Reynolds-Averaged Navier–Stokes equations, are systematically compared on two benchmark wings. The first is the Onera M6 wing [
26], a rigid and widely used transonic test case, and the second is the Embraer Benchmark Wing, which is elastic and more representative of an airliner wing. The differences in predicted aerodynamic loads and wing deflections, as well as in convergence characteristics and computational cost are analyzed, with the aim of identifying the fastest method yielding consistent and reliable results. The present work is organized as follows. In
Section 2, the equations used for aerodynamic and structural modeling are briefly presented. The solvers used to carry out the calculations are also briefly described. The different fluid models are then used to solve transonic flow conditions on two rigid benchmark wings in
Section 3. The resulting aerodynamic load predictions and related computational costs are compared.
Section 4 is dedicated to a similar comparison but on an elastic wing. Finally, the results are summarized and discussed in
Section 5 and future work is suggested.
4. Static Aeroelastic Case
In this section, models PAN, NAS, NASC, FLO, and SU2 are compared on the flexible Embraer Benchmark Wing, which is analyzed in the context of a static fluid–structure interaction simulation. The objective is to predict the deformed shape of the wing subjected to the flight condition described in
Section 3.2 and to recover the new angle of attack needed to obtain a lift coefficient of
, as well as the new load distributions along the span. Note that the wing is clamped at its root to represent its attachment to the fuselage. Such a boundary condition is not fully realistic as the fuselage is not rigid. However, this setup allows comparing the different solvers.
The aerodynamic meshes used by all the models are those described in
Section 3.2. The associated structural model was discretized in
NASTRAN and consists of
shell elements. The fluid–structure computations for NAS and NASC were carried out directly within
NASTRAN using the elastic trim analysis. The other aerodynamic models were coupled to a structural model, obtained by a modal decomposition performed in
NASTRAN. The mesh used by the modal solver consists of 2100 points distributed on the surface of the wing. Note that these points were only used to create the modal matrix to transfer quantities between the physical and modal spaces. FLO and SU2 were coupled to the modal solver using
CUPyDO while PAN was coupled through
MATLAB. The fluid–structure computation stopped when the difference in an objective function between two consecutive iterations fell below a given tolerance. In
CUPyDO, the objective function includes the displacements, while the loads are considered in
MATLAB. In both cases, a normalized tolerance of
was used.
4.1. Aerodynamic Loads
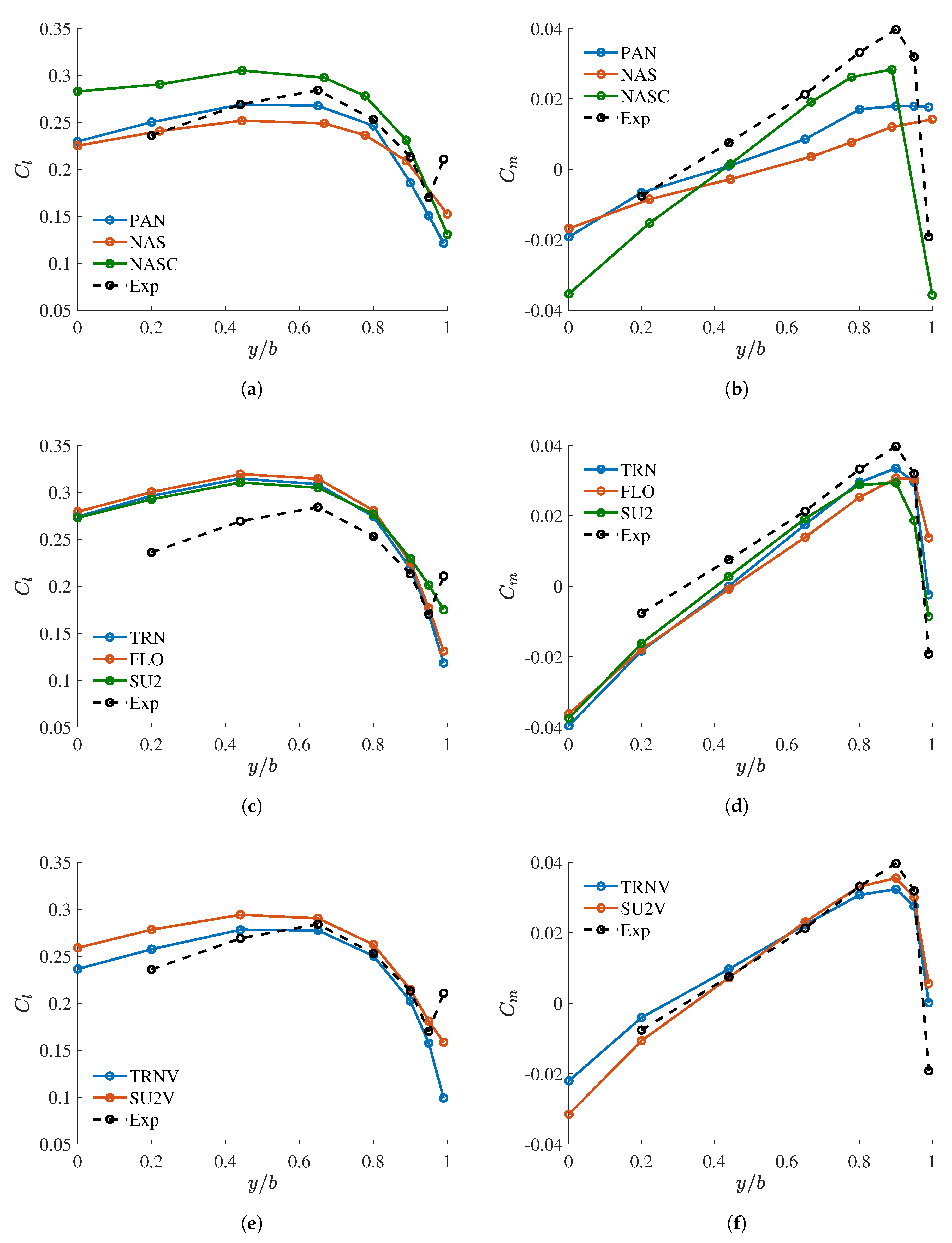
Table 9 summarizes the new angle of attack and aerodynamic coefficients of the benchmark wing in its deformed configuration. As in the rigid case presented in
Section 3.2, the linear model PAN slightly overpredicts the angle of attack needed to achieve the target lift coefficient when compared to nonlinear models. On the other hand, the lattice model NAS neglects the camber of the wing, strongly overperdicts the angle of attack, and underpredicts the moment coefficient. Using the Euler correction with NASC significantly improves the predictions, even though the angle of attack is still overestimated by about 1 degree. In this case, FLO was also found to strongly underestimate the drag coefficient when compared to SU2. Comparing the results in
Table 7 and
Table 9 illustrates the impact of wing deformation on the angle of attack and aerodynamic coefficients.
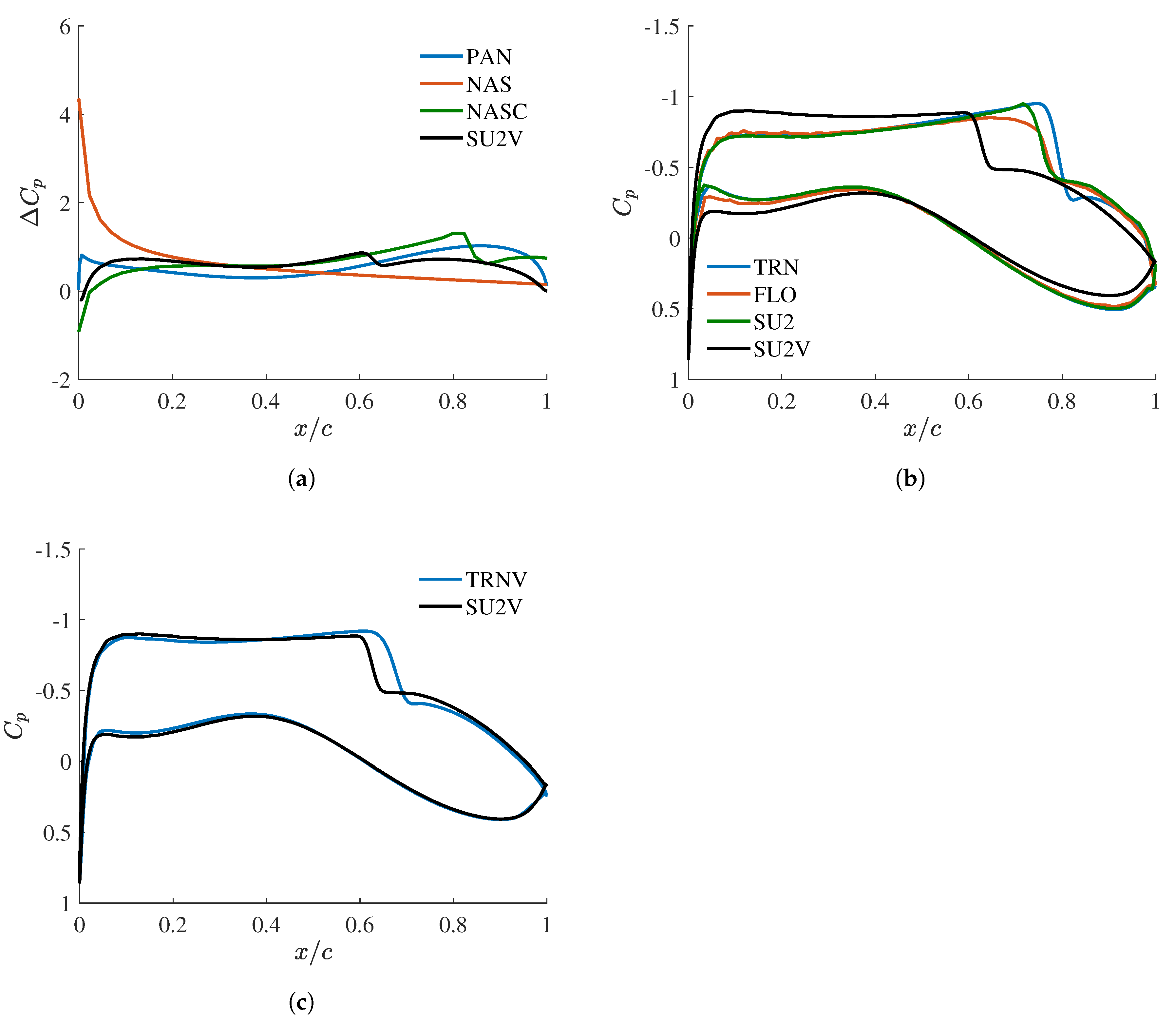
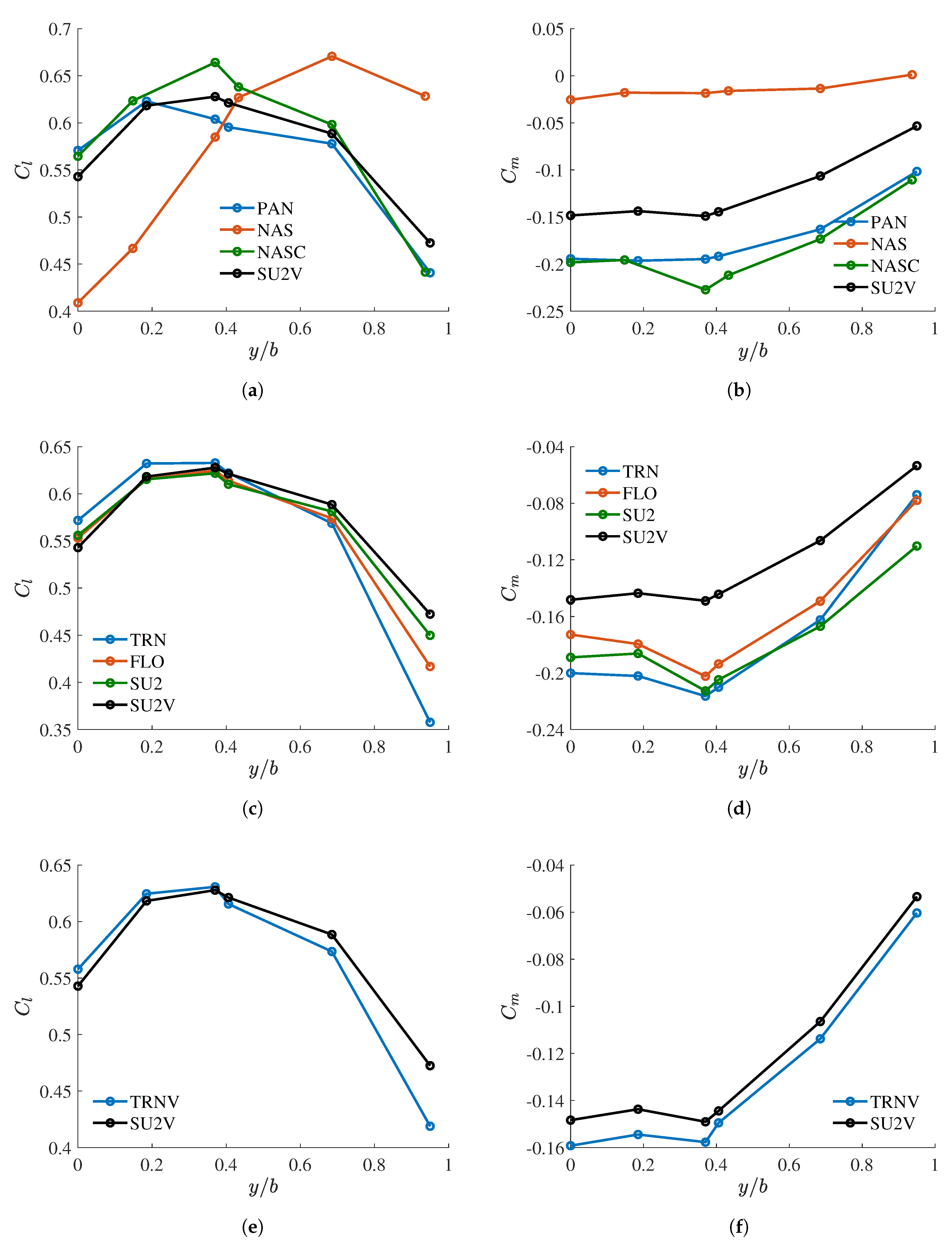
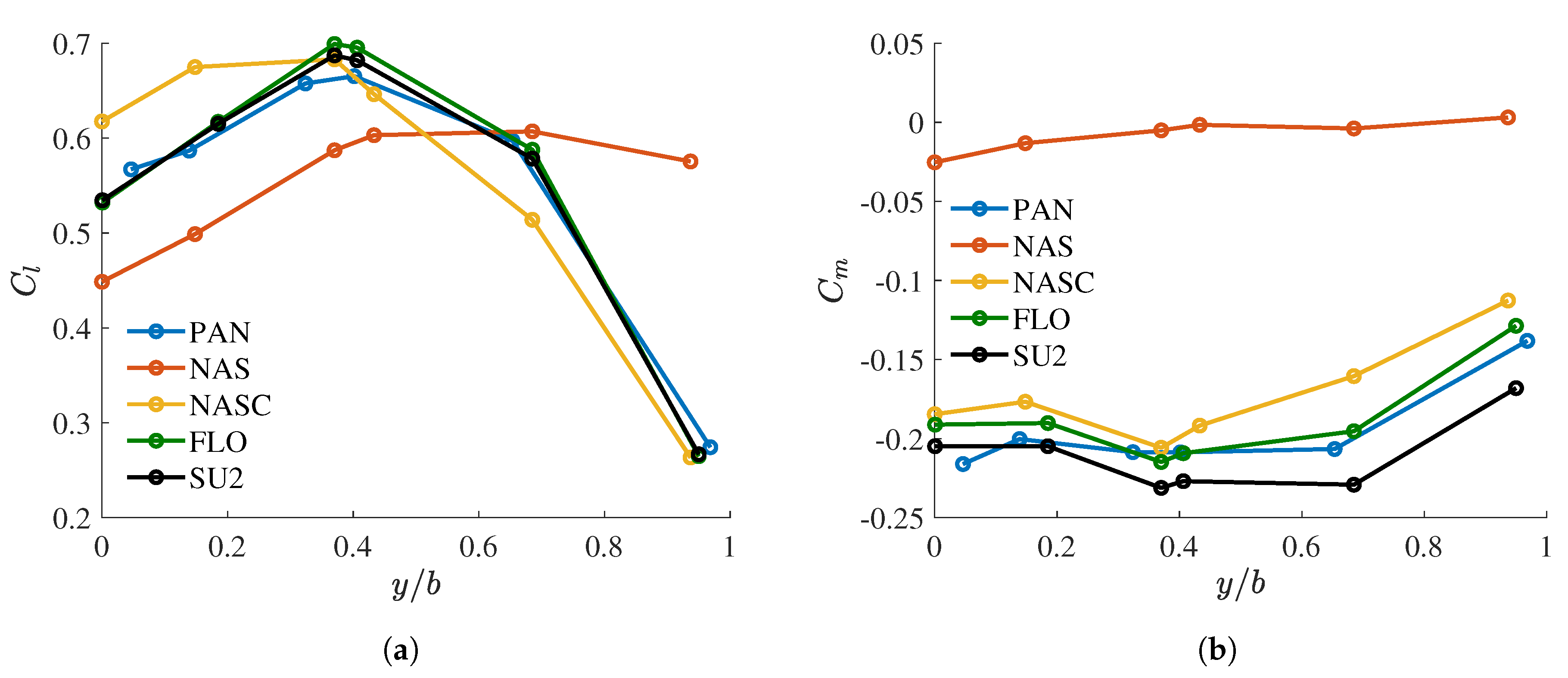
Figure 7a,b shows the lift and the quarter-chord moment coefficient distribution along the span of the deformed wing, respectively. With the exception of NAS, all models predict similar distributions for both the lift and moment. Note that, as there is no viscous solution, it is not known if the inviscid methods still underestimate the moment. Again, NAS is completely inaccurate as it ignores the camber of the wing.
4.2. Wing Deflection
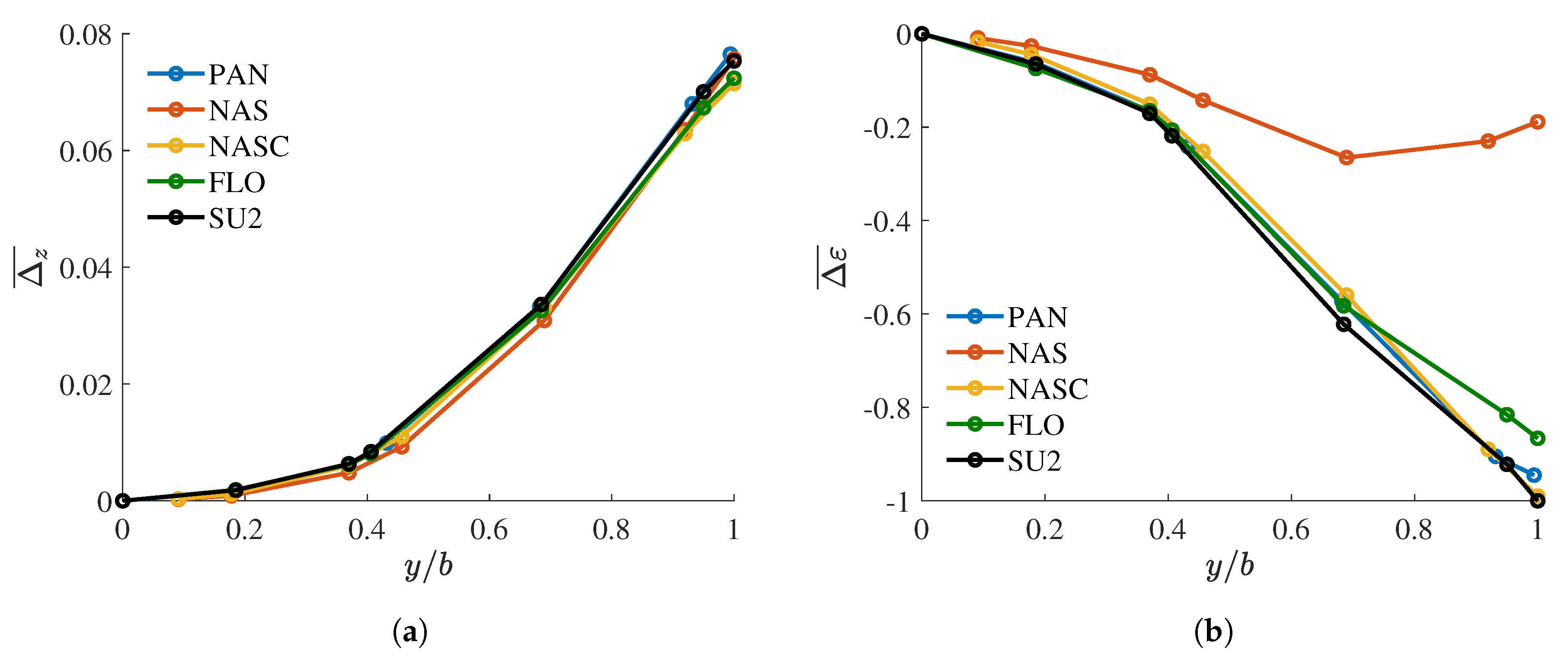
Figure 8 shows the vertical displacement, averaged between the leading and trailing edges, and the nose-up rotation along the span of the deformed wing. Note that the displacement is normalized with respect to the half-span of the wing and the rotation angle is normalized by the maximum value of the rotation. All models predict similar results for both displacement and rotation, except for NAS, which strongly underestimates rotation at the outboard section of the wing.
4.3. Computational Performance
The mesh size and the computational time required to run the computations are given in
Table 10. The calculations were performed in serial on a laptop fitted with an Intel i7-7700HQ processor (
GHz). In this case, the computational cost of the Euler correction required by NASC is included. PAN, FLO, and SU2 converged, respectively in nine, seven, and nine FSI iterations, while NAS and NASC converged in three iterations. PAN and NAS are more than one order of magnitude faster than FLO, which is itself more than one order of magnitude faster than SU2.
4.4. Discussion
Although panel methods do not capture shocks, their static aeroelastic predictions are, in general, quite similar to those obtained from the nonlinear solvers. For the present case at least, static wing deflections are not sensitive to shock modeling. Consequently, flight shape calculations can be carried out using linear methods with reasonable confidence in the predictions. In any case, the camber must be modeled or corrected, otherwise wildly inaccurate results will be obtained. The corrected doublet lattice model is also quite accurate but its computational cost is much higher due to the need to calculate an Euler solution.
Note that the ability of linear methods to predict wing displacements accurately seems to be quite sensitive to the geometry. Results previously reported by Romanelli et al. [
21] show that the doublet lattice method was less accurate than Euler computations, especially near the wingtip. However, it is unclear whether the authors corrected the method with higher-fidelity data.
5. Conclusions
The objective of the present work is to assess systematically the impact of the aerodynamic level of fidelity on steady aerodynamic and static aeroelastic computations typically performed in preliminary aircraft design. To this end, several aerodynamic models were compared on the Onera M6 and the Embraer Benchmark wings.
The assumptions made by considering different levels of fidelity can be grouped into four categories: flow viscosity, isentropicity, linearity, and model geometry. The results obtained in the context of steady aerodynamic computations on both rigid wings illustrate that neglecting the viscosity leads to an underestimation of the aerodynamic loads, particularly the moment and the drag. When the lift coefficient is imposed, the angle of attack is underestimated by about
. The shock strength is also underestimated and its location is moved downstream. These results globally agree with those previously reported in the literature [
9,
13]. Considering the flow to be isentropic does not significantly affect the solution. This is particularly true for the flows considered in aircraft design, where only weak shocks are present. However, the results obtained on the Onera M6 demonstrate that the full potential formulation does not necessarily break down when a relatively strong shock is present, although this statement raises the question of what constitutes a strong shock wave and what are the exact limits of validity of the full potential theory. Further considering the flow to be fully linear has only a mild impact on the lift and the moment, even if the pressure distribution is significantly affected. The drag is also underestimated since the wave drag produced through shocks is not accounted for. Finally, modeling the wing without accounting for its camber results in a complete miscalculation of the angle of attack and aerodynamic loads.
The present analysis suggests that at least a nonlinear method is required to accurately capture transonic physics. Even though full potential methods achieve the best tradeoff between accuracy and computational cost for rigid steady computations, they are still too expensive for static aeroelastic computations in preliminary aircraft design. As such, calculations are usually performed on wings already optimized for the transonic flow regime; a linear potential method seems sufficient to predict the wing loading and deformation and should yield results similar to those obtained using nonlinear methods, except for the drag. Note, however, that this result strongly depends on the geometry, as results previously reported in the literature [
21] suggest that linear methods are not necessarily accurate in transonic cases. In any case, if a linear model is used to compute the wing deflection, a single nonlinear rigid aerodynamic calculation should be performed on the deformed shape in order to estimate more accurate aerodynamic loads. This two-stage computation strategy might offer a cheaper alternative to multi-fidelity static aeroelastic computations, whereby nonlinear computations are performed during the iterative process to calibrate a linear computation. The two-stage computation could also be more accurate than correcting a linear method with higher-fidelity data obtained from a rigid aerodynamic computation performed on the undeformed wing shape.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}