
A Spatiotemporal Fusion Model of Land Surface Temperature Based on Pixel Long Time-Series Regression: Expanding Inputs for Efficient Generation of Robust Fused Results

 , , ,
, , ,
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Fusion Data Types
2.2. Regions and Date Range
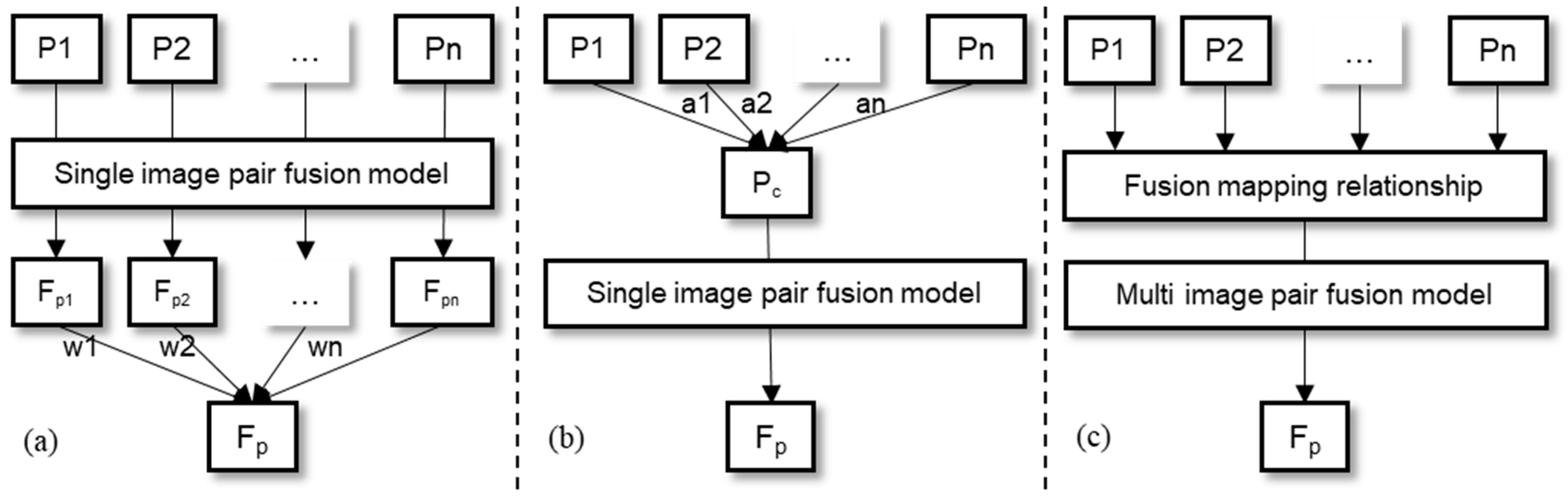
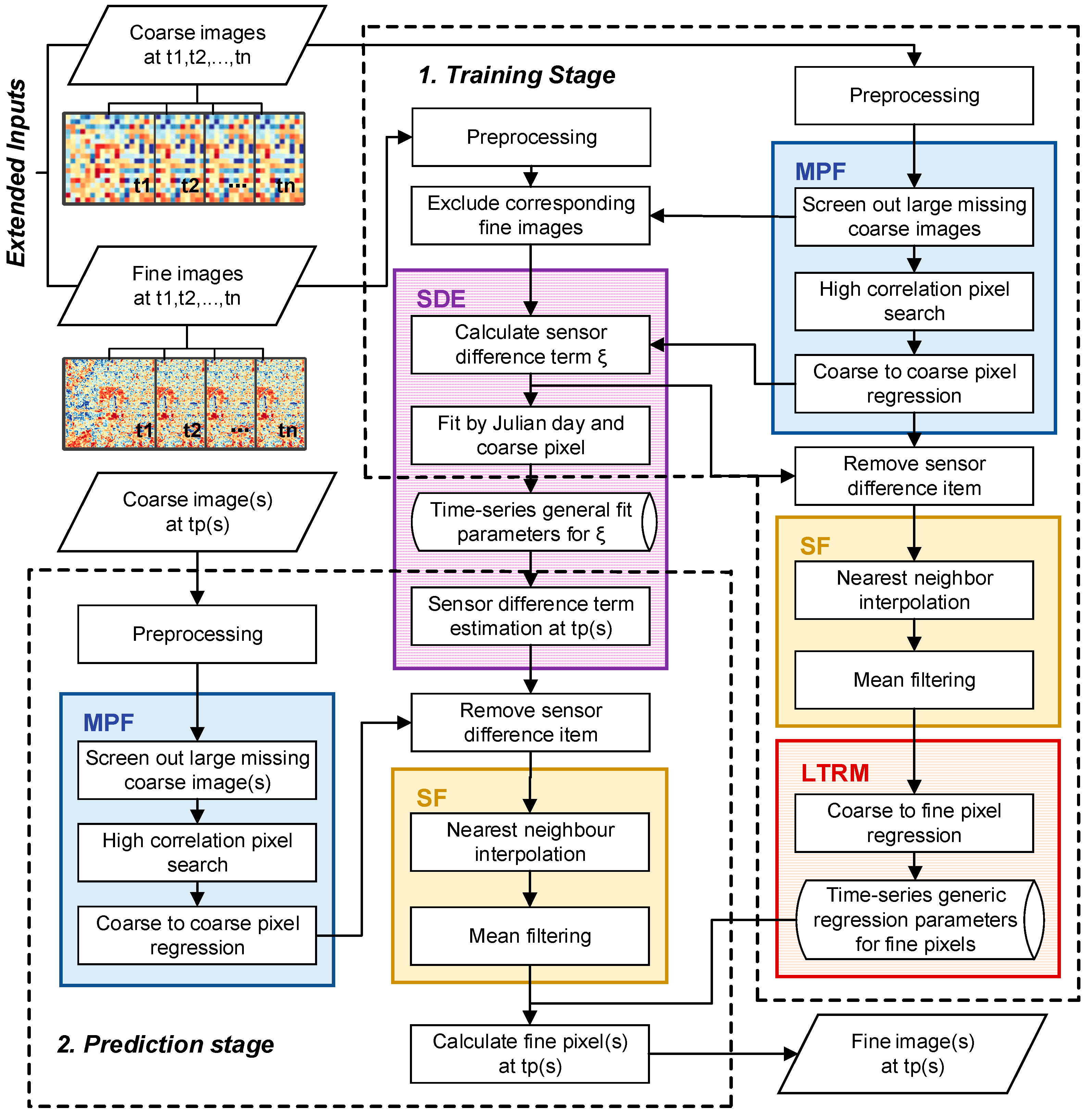
2.3. Fusion Model Structure
2.4. Long Time-Series Regression Model
2.5. Sensor Difference Term Estimation
2.6. Missing Pixel Filling
2.7. Spatial Filtering
3. Experiments and Results
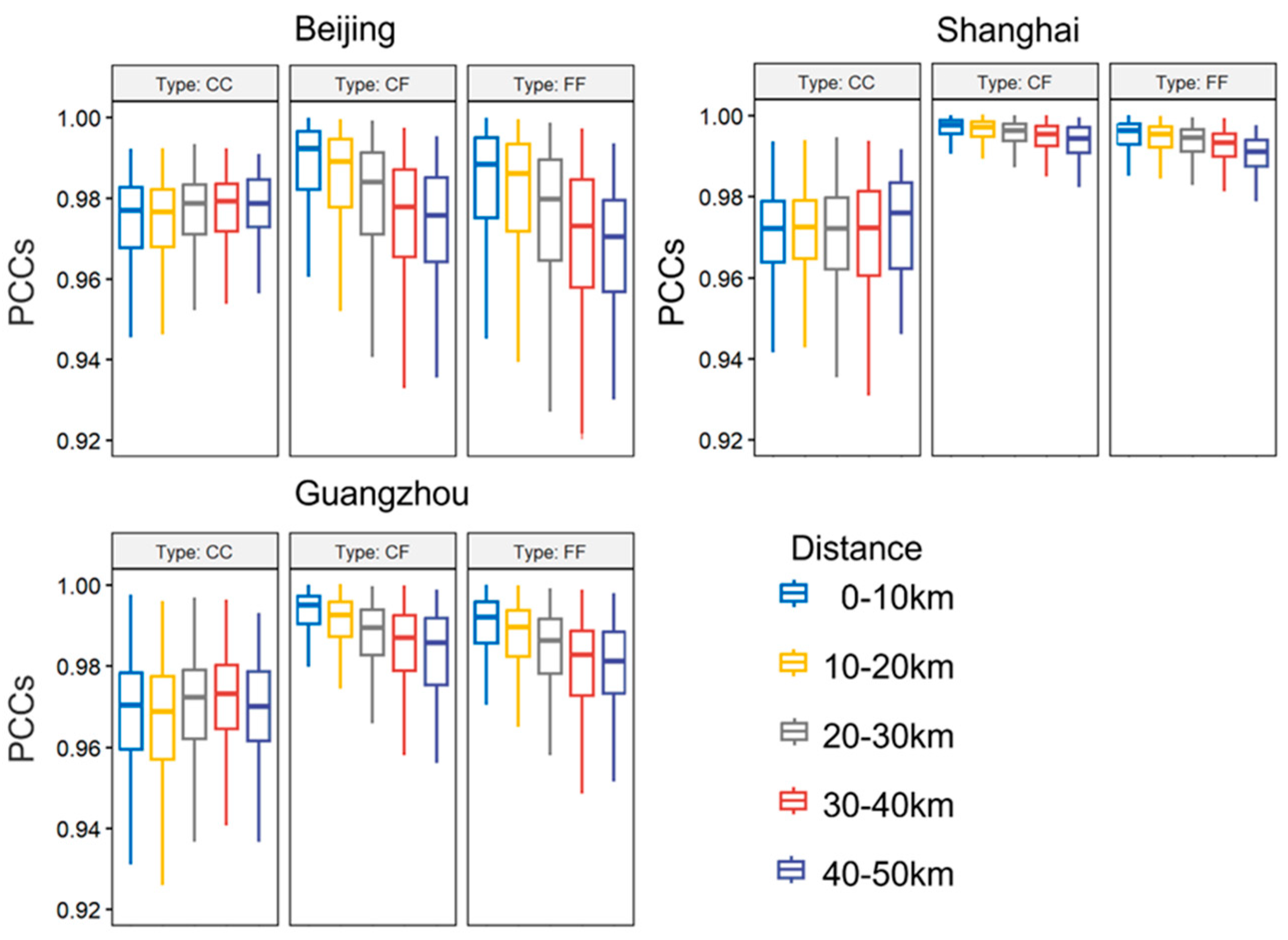
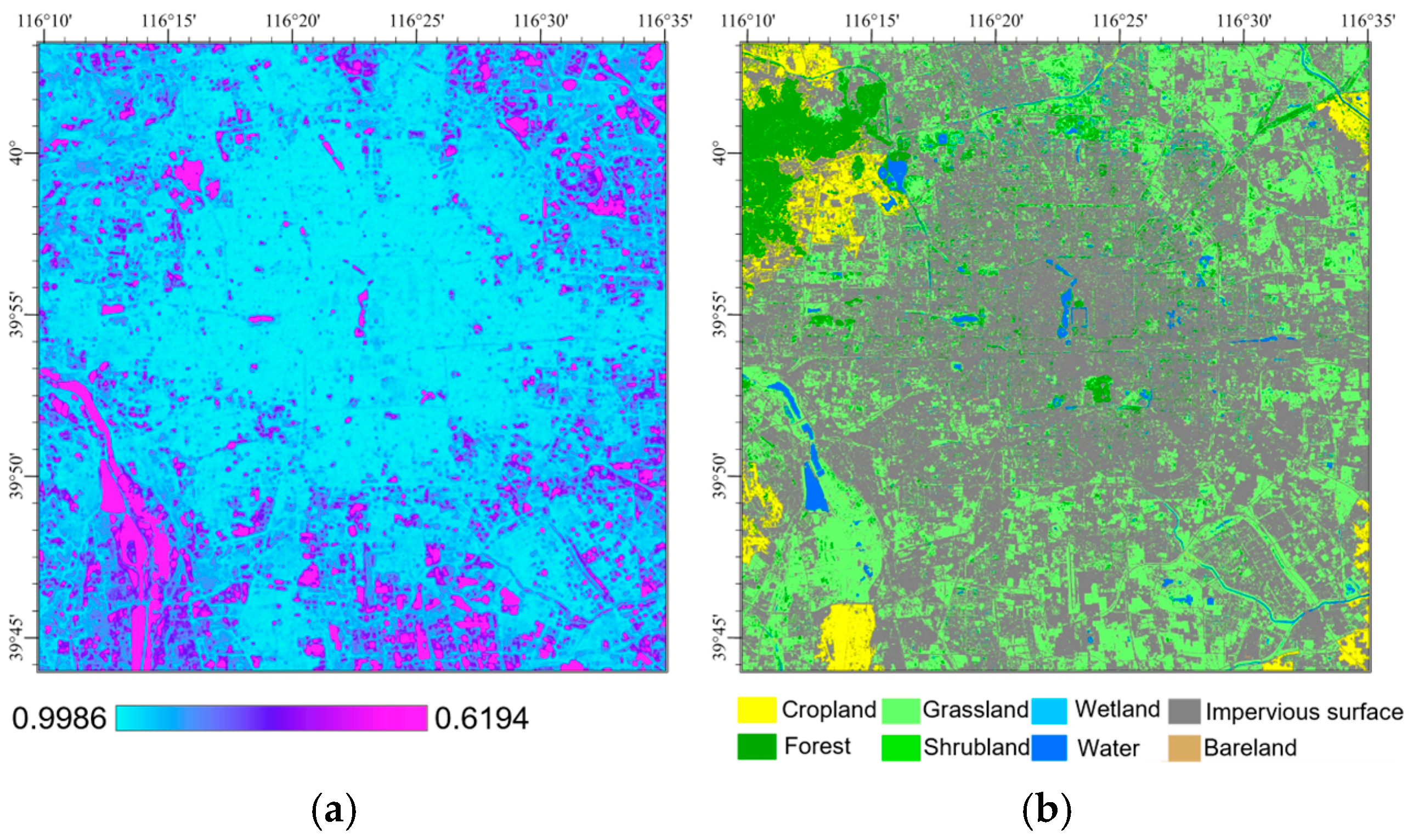
3.1. Time-Series Correlation Levels between Pixels
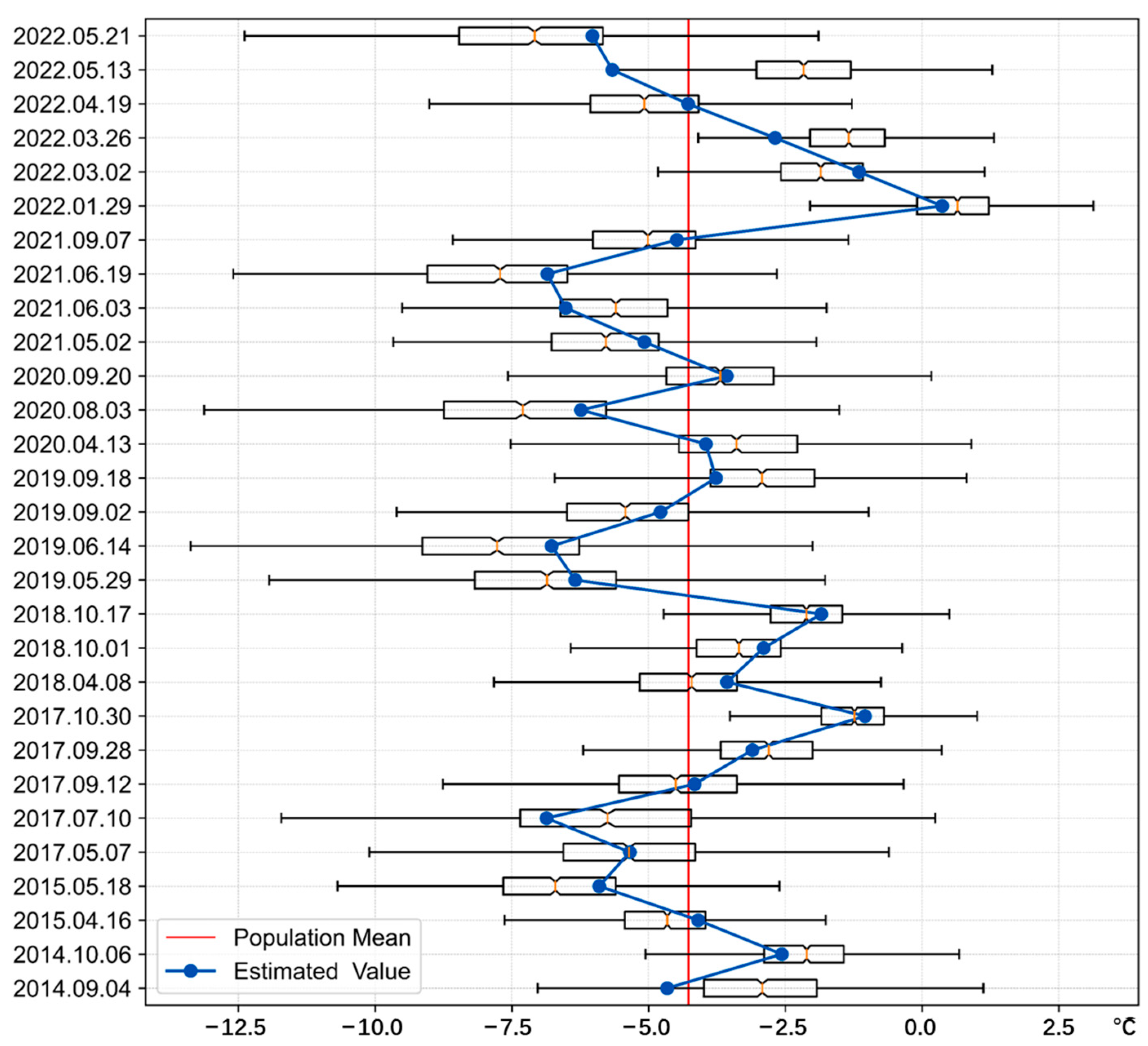
3.2. Regional Replicability Assessment of LOTSFM
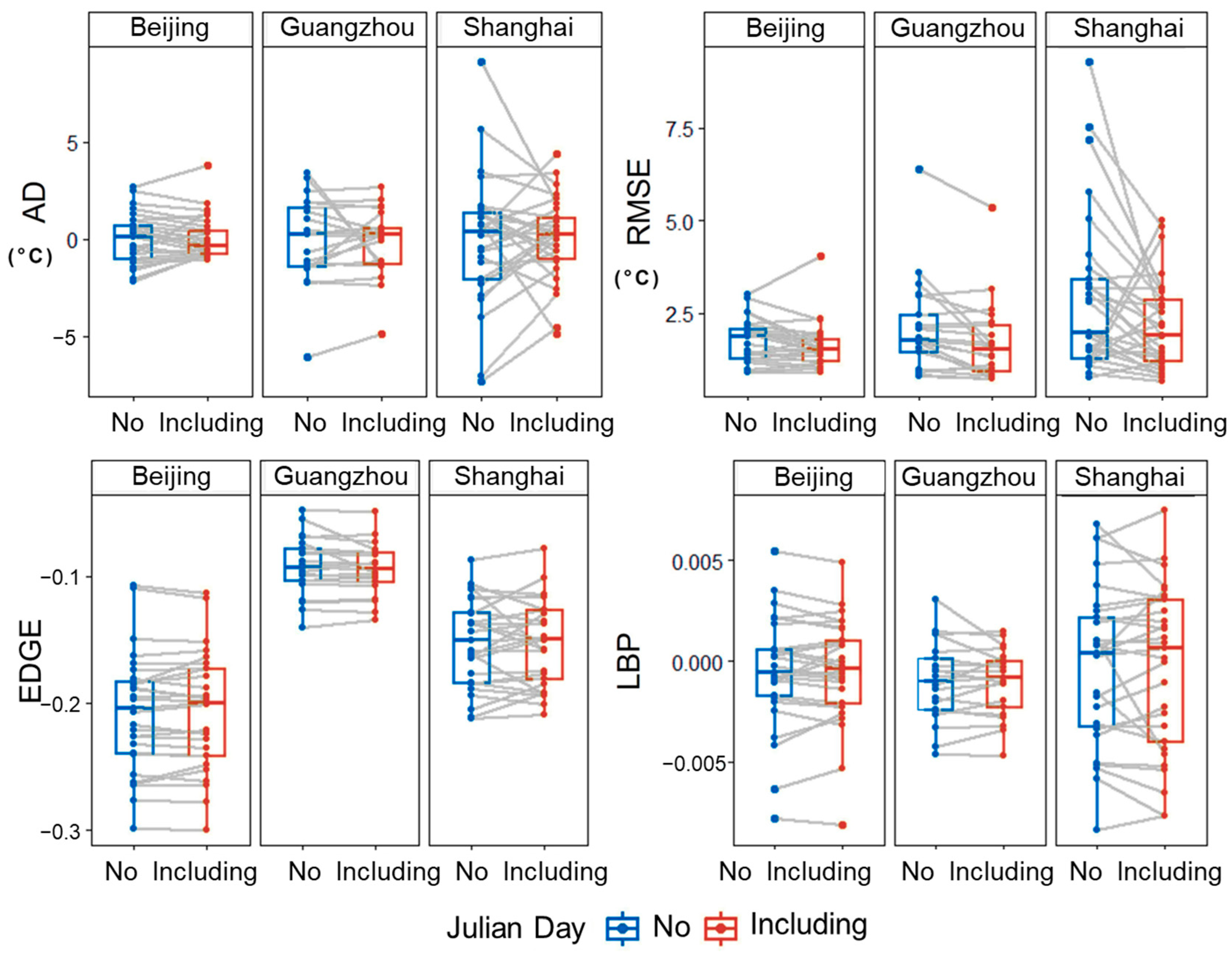
3.3. SDE Component Validity Assessment of LOTSFM
3.4. Fusion Accuracy Comparison with Other Models
3.5. Fusion Time Comparison with Other Models
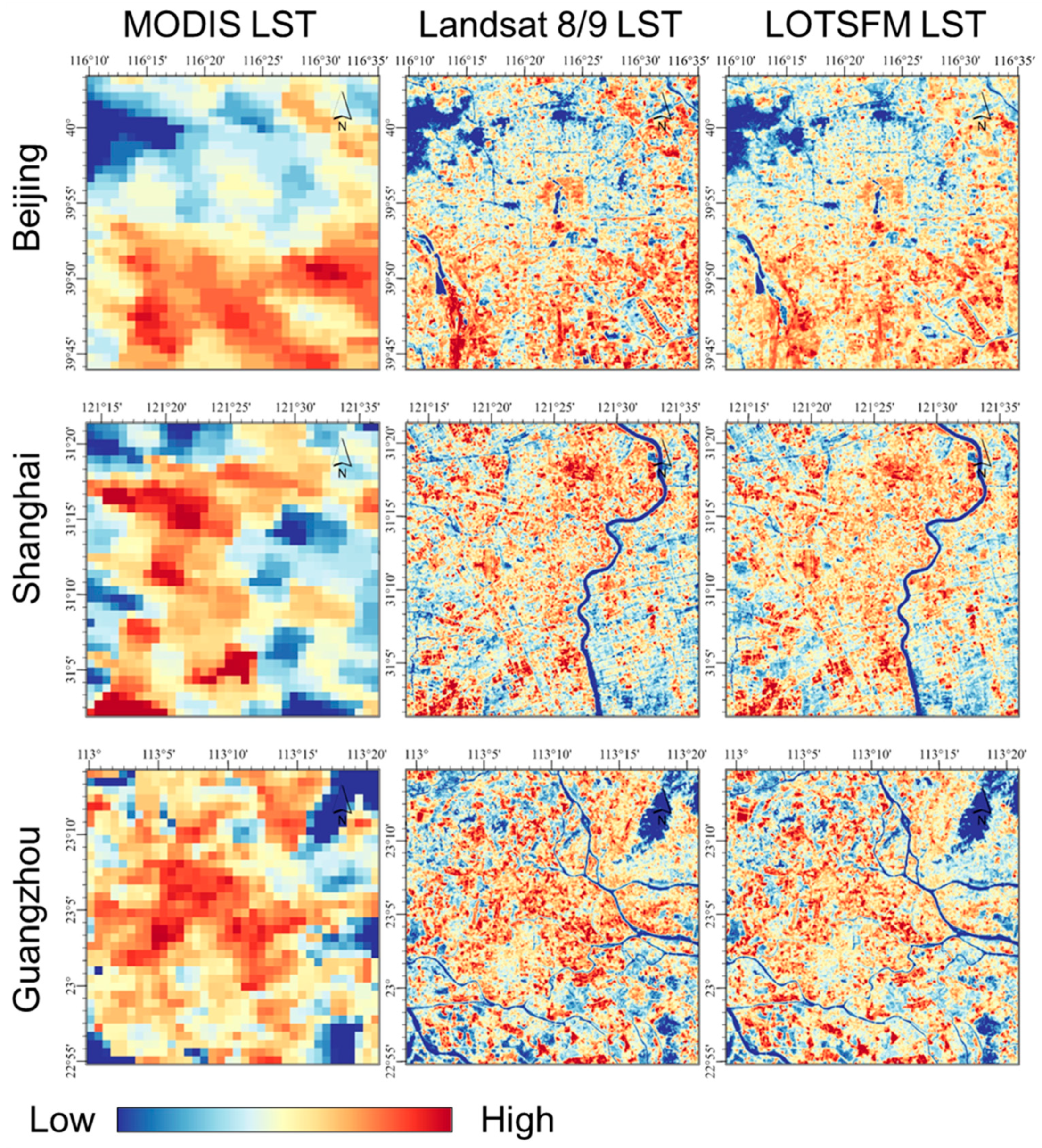
3.6. Spatial Details Comparison with Other Models
3.7. Error Distribution of Different Input Models
4. Discussion
4.1. Usage and Data Flexibility
4.2. Fusion Performance Predictability
4.3. Limitations
5. Conclusions
- LOTSFM is a model with extended inputs, requiring only the necessary number of input samples to avoid sample selection and improve the robustness of the results.
- LOTSFM consists of two stages, training and prediction, and employs multi-process parallel computing to rapidly generate spatiotemporal fusion data in batches.
- LOTSFM utilized Julian days to estimate the sensor difference term, which was experimentally shown to significantly improve numerical accuracy.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Peng, S.; Piao, S.; Ciais, P.; Friedlingstein, P.; Ottle, C.; Bréon, F.M.; Nan, H.; Zhou, L.; Myneni, R.B. Surface urban heat island across 419 global big cities. Environ. Sci. Technol. 2012, 46, 696–703. [Google Scholar] [CrossRef]
- Santamouris, M. On the energy impact of urban heat island and global warming on buildings. Energy Build. 2014, 82, 100–113. [Google Scholar] [CrossRef]
- Singh, N.; Singh, S.; Mall, R. Urban Ecology and Human Health: Implications of Urban Heat Island, Air Pollution and Climate Change Nexus. In Urban Ecology; Elsevier: Amsterdam, The Netherlands, 2020; pp. 317–334. [Google Scholar] [CrossRef]
- Zhou, D.; Zhao, S.; Zhang, L.; Sun, G.; Liu, Y. The footprint of urban heat island effect in China. Sci. Rep. 2015, 5, 11160. [Google Scholar] [CrossRef]
- Meng, Q.; Zhang, L.; Sun, Z.; Meng, F.; Wang, L.; Sun, Y. Characterizing spatial and temporal trends of surface urban heat island effect in an urban main built-up area: A 12-year case study in Beijing, China. Remote Sens. Environ. 2018, 204, 826–837. [Google Scholar] [CrossRef]
- Ghaderpour, E.; Mazzanti, P.; Mugnozza, G.S.; Bozzano, F. Coherency and phase delay analyses between land cover and climate across Italy via the least-squares wavelet software. Int. J. Appl. Earth Obs. Geoinf. 2023, 118, 103241. [Google Scholar] [CrossRef]
- Liu, J.; Hagan, D.F.; Liu, Y. Global Land Surface Temperature Change (2003–2017) and Its Relationship with Climate Drivers: AIRS, MODIS, and ERA5-Land Based Analysis. Remote Sens. 2021, 13, 44. [Google Scholar] [CrossRef]
- Guan, Y.; Quan, J.; Ma, T.; Cao, S.; Xu, C.; Guo, J. Identifying Major Diurnal Patterns and Drivers of Surface Urban Heat Island Intensities across Local Climate Zones. Remote Sens. 2023, 15, 5061. [Google Scholar] [CrossRef]
- Sobrino, J.; Oltra-Carrió, R.; Sòria, G.; Bianchi, R.; Paganini, M. Impact of spatial resolution and satellite overpass time on evaluation of the surface urban heat island effects. Remote Sens. Environ. 2012, 117, 50–56. [Google Scholar] [CrossRef]
- Gao, J.; Meng, Q.; Zhang, L.; Hu, D. How does the ambient environment respond to the industrial heat island effects? An innovative and comprehensive methodological paradigm for quantifying the varied cooling effects of different landscapes. GIsci. Remote Sens. 2022, 59, 1643–1659. [Google Scholar] [CrossRef]
- Shen, H.; Huang, L.; Zhang, L.; Wu, P.; Zeng, C. Long-term and fine-scale satellite monitoring of the urban heat island effect by the fusion of multi-temporal and multi-sensor remote sensed data: A 26-year case study of the city of Wuhan in China. Remote Sens. Environ. 2016, 172, 109–125. [Google Scholar] [CrossRef]
- Meng, Q.; Hu, D.; Zhang, Y.; Chen, X.; Zhang, L.; Wang, Z. Do industrial parks generate intra-heat island effects in cities? New evidence, quantitative methods, and contributing factors from a spatiotemporal analysis of top steel plants in China. Environ. Pollut. 2022, 292, 118383. [Google Scholar] [CrossRef]
- Meng, Q.; Liu, W.; Zhang, L.; Allam, M.; Bi, Y.; Hu, X.; Gao, J.; Hu, D.; Jancsó, T. Relationships between Land Surface Temperatures and Neighboring Environment in Highly Urbanized Areas: Seasonal and Scale Effects Analyses of Beijing, China. Remote Sens. 2022, 14, 4340. [Google Scholar] [CrossRef]
- Kovalskyy, V.; Roy, D.P. The global availability of Landsat 5 TM and Landsat 7 ETM+ land surface observations and implications for global 30 m Landsat data product generation. Remote Sens. Environ. 2013, 130, 280–293. [Google Scholar] [CrossRef]
- Li, J.; Chen, B. Global revisit interval analysis of Landsat-8-9 and Sentinel-2a-2b data for terrestrial monitoring. Sensors 2020, 20, 6631. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Woodcock, C.E.; Holden, C.; Yang, Z. Generating synthetic Landsat images based on all available Landsat data: Predicting Landsat surface reflectance at any given time. Remote Sens. Environ. 2015, 162, 67–83. [Google Scholar] [CrossRef]
- Lai, J.; Zhan, W.; Huang, F.; Voogt, J.; Bechtel, B.; Allen, M.; Peng, S.; Hong, F.; Liu, Y.; Du, P. Identification of typical diurnal patterns for clear-sky climatology of surface urban heat islands. Remote Sens. Environ. 2018, 217, 203–220. [Google Scholar] [CrossRef]
- Li, J.; Li, Z.-L.; Wu, H.; You, N. Trend, seasonality, and abrupt change detection method for land surface temperature time-series analysis: Evaluation and improvement. Remote Sens. Environ. 2022, 280, 113222. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Linke, J.; McDermid, G.; Masek, J.G.; Gao, F.; White, J.C. A new data fusion model for high spatial- and temporal-resolution mapping of forest disturbance based on Landsat and MODIS. Remote Sens. Environ. 2009, 113, 1613–1627. [Google Scholar] [CrossRef]
- Rao, C.V.; Malleswara Rao, J.; Senthil Kumar, A.; Dadhwal, V.K. Fast spatiotemporal data fusion: Merging LISS III with AWiFS sensor data. Int. J. Remote Sens. 2014, 35, 8323–8344. [Google Scholar] [CrossRef]
- Wang, Q.; Blackburn, G.A.; Onojeghuo, A.O.; Dash, J.; Zhou, L.; Zhang, Y.; Atkinson, P.M. Fusion of Landsat 8 OLI and Sentinel-2 MSI Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3885–3899. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Zhu, X.; Cai, F.; Tian, J.; Williams, T. Spatiotemporal Fusion of Multisource Remote Sensing Data: Literature Survey, Taxonomy, Principles, Applications, and Future Directions. Remote Sens. 2018, 10, 527. [Google Scholar] [CrossRef]
- Wu, P.; Yin, Z.; Zeng, C.; Duan, S.-B.; Gottsche, F.-M.; Ma, X.; Li, X.; Yang, H.; Shen, H. Spatially Continuous and High-Resolution Land Surface Temperature Product Generation: A review of reconstruction and spatiotemporal fusion techniques. IEEE Geosci. Remote Sens. Mag. 2021, 9, 112–137. [Google Scholar] [CrossRef]
- Wu, M.; Niu, Z.; Wang, C.; Wu, C.; Wang, L. Use of MODIS and Landsat time series data to generate high-resolution temporal synthetic Landsat data using a spatial and temporal reflectance fusion model. J. Appl. Remote Sens. 2012, 6, 063507. [Google Scholar] [CrossRef]
- Zhukov, B.; Oertel, D.; Lanzl, F.; Reinhackel, G. Unmixing-based multisensor multiresolution image fusion. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1212–1226. [Google Scholar] [CrossRef]
- Li, A.; Bo, Y.; Zhu, Y.; Guo, P.; Bi, J.; He, Y. Blending multi-resolution satellite sea surface temperature (SST) products using Bayesian maximum entropy method. Remote Sens. Environ. 2013, 135, 52–63. [Google Scholar] [CrossRef]
- Xue, J.; Leung, Y.; Fung, T. A Bayesian Data Fusion Approach to Spatio-Temporal Fusion of Remotely Sensed Images. Remote Sens. 2017, 9, 1310. [Google Scholar] [CrossRef]
- Cai, J.; Huang, B.; Fung, T. Progressive spatiotemporal image fusion with deep neural networks. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102745. [Google Scholar] [CrossRef]
- Huang, B.; Song, H. Spatiotemporal Reflectance Fusion via Sparse Representation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3707–3716. [Google Scholar] [CrossRef]
- Zhu, Z.; Tao, Y.; Luo, X. HCNNet: A Hybrid Convolutional Neural Network for Spatiotemporal Image Fusion. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Gevaert, C.M.; García-Haro, F.J. A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion. Remote Sens. Environ. 2015, 156, 34–44. [Google Scholar] [CrossRef]
- Li, X.; Ling, F.; Foody, G.M.; Ge, Y.; Zhang, Y.; Du, Y. Generating a series of fine spatial and temporal resolution land cover maps by fusing coarse spatial resolution remotely sensed images and fine spatial resolution land cover maps. Remote Sens. Environ. 2017, 196, 293–311. [Google Scholar] [CrossRef]
- Zhu, X.; Helmer, E.H.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M.A. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Guo, D.; Shi, W.; Hao, M.; Zhu, X. FSDAF 2.0: Improving the performance of retrieving land cover changes and preserving spatial details. Remote Sens. Environ. 2020, 248, 111973. [Google Scholar] [CrossRef]
- Li, X.; Foody, G.M.; Boyd, D.S.; Ge, Y.; Zhang, Y.; Du, Y.; Ling, F. SFSDAF: An enhanced FSDAF that incorporates sub-pixel class fraction change information for spatio-temporal image fusion. Remote Sens. Environ. 2020, 237, 111537. [Google Scholar] [CrossRef]
- Liu, M.; Yang, W.; Zhu, X.; Chen, J.; Chen, X.; Yang, L.; Helmer, E.H. An Improved Flexible Spatiotemporal DAta Fusion (IFSDAF) method for producing high spatiotemporal resolution normalized difference vegetation index time series. Remote Sens. Environ. 2019, 227, 74–89. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, J. A high spatiotemporal resolution land surface temperature research over Qinghai-Tibet Plateau for 2000–2020. Phys. Chem. Earth 2022, 128, 103206. [Google Scholar] [CrossRef]
- Long, D.; Yan, L.; Bai, L.; Zhang, C.; Li, X.; Lei, H.; Yang, H.; Tian, F.; Zeng, C.; Meng, X.; et al. Generation of MODIS-like land surface temperatures under all-weather conditions based on a data fusion approach. Remote Sens. Environ. 2020, 246, 111863. [Google Scholar] [CrossRef]
- Huang, B.; Wang, J.; Song, H.; Fu, D.; Wong, K. Generating High Spatiotemporal Resolution Land Surface Temperature for Urban Heat Island Monitoring. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1011–1015. [Google Scholar] [CrossRef]
- Weng, Q.; Fu, P.; Gao, F. Generating daily land surface temperature at Landsat resolution by fusing Landsat and MODIS data. Remote Sens. Environ. 2014, 145, 55–67. [Google Scholar] [CrossRef]
- Wu, P.; Shen, H.; Zhang, L.; Göttsche, F.-M. Integrated fusion of multi-scale polar-orbiting and geostationary satellite observations for the mapping of high spatial and temporal resolution land surface temperature. Remote Sens. Environ. 2015, 156, 169–181. [Google Scholar] [CrossRef]
- Quan, J.; Zhan, W.; Ma, T.; Du, Y.; Guo, Z.; Qin, B. An integrated model for generating hourly Landsat-like land surface temperatures over heterogeneous landscapes. Remote Sens. Environ. 2018, 206, 403–423. [Google Scholar] [CrossRef]
- Xia, H.; Chen, Y.; Li, Y.; Quan, J. Combining kernel-driven and fusion-based methods to generate daily high-spatial-resolution land surface temperatures. Remote Sens. Environ. 2019, 224, 259–274. [Google Scholar] [CrossRef]
- Yin, Z.; Wu, P.; Foody, G.M.; Wu, Y.; Liu, Z.; Du, Y.; Ling, F. Spatiotemporal fusion of land surface temperature based on a convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2020, 59, 1808–1822. [Google Scholar] [CrossRef]
- Chen, B.; Huang, B.; Xu, B. Comparison of Spatiotemporal Fusion Models: A Review. Remote Sens. 2015, 7, 1798–1835. [Google Scholar] [CrossRef]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Seitz, N.; White, J.C.; Gao, F.; Masek, J.G.; Stenhouse, G. Generation of dense time series synthetic Landsat data through data blending with MODIS using a spatial and temporal adaptive reflectance fusion model. Remote Sens. Environ. 2009, 113, 1988–1999. [Google Scholar] [CrossRef]
- Wang, P.; Gao, F.; Masek, J.G. Operational Data Fusion Framework for Building Frequent Landsat-Like Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7353–7365. [Google Scholar] [CrossRef]
- Quan, J.; Zhan, W.; Chen, Y.; Wang, M.; Wang, J. Time series decomposition of remotely sensed land surface temperature and investigation of trends and seasonal variations in surface urban heat islands. J. Geophys. Res. 2016, 121, 2638–2657. [Google Scholar] [CrossRef]
- Sheri, A.S.; Liyin, L.L.; Steven, M.C.; Gudina, L.F.; Jun, W.; Jenerette, G.D. Variation in the urban vegetation, surface temperature, air temperature nexus. Sci. Total Environ. 2017, 579, 495–505. [Google Scholar] [CrossRef]
- Chen, Y.; Cao, R.; Chen, J.; Zhu, X.; Zhou, J.; Wang, G.; Shen, M.; Chen, X.; Yang, W. A New Cross-Fusion Method to Automatically Determine the Optimal Input Image Pairs for NDVI Spatiotemporal Data Fusion. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5179–5194. [Google Scholar] [CrossRef]
- Chen, Y.; Ge, Y. Spatiotemporal image fusion using multiscale attention-aware two-stream convolutional neural networks. Sci. Remote Sens. 2022, 6, 100062. [Google Scholar] [CrossRef]
- Wang, Q.; Tang, Y.; Tong, X.; Atkinson, P.M. Virtual image pair-based spatio-temporal fusion. Remote Sens. Environ. 2020, 249, 112009. [Google Scholar] [CrossRef]
- Chen, S.; Wang, J.; Gong, P. ROBOT: A spatiotemporal fusion model toward seamless data cube for global remote sensing applications. Remote Sens. Environ. 2023, 294, 113616. [Google Scholar] [CrossRef]
- Tan, Z.; Gao, M.; Li, X.; Jiang, L. A Flexible Reference-Insensitive Spatiotemporal Fusion Model for Remote Sensing Images Using Conditional Generative Adversarial Network. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–13. [Google Scholar] [CrossRef]
- Jiménez-Muñoz, J.C.; Sobrino, J.A. A generalized single-channel method for retrieving land surface temperature from remote sensing data. J. Geophys. Res. 2003, 108, 4688. [Google Scholar] [CrossRef]
- Qin, Z.; Karnieli, A.; Berliner, P. A mono-window algorithm for retrieving land surface temperature from Landsat TM data and its application to the Israel-Egypt border region. Int. J. Remote Sens. 2001, 22, 3719–3746. [Google Scholar] [CrossRef]
- Yu, X.; Guo, X.; Wu, Z. Land Surface Temperature Retrieval from Landsat 8 TIRS—Comparison between Radiative Transfer Equation-Based Method, Split Window Algorithm and Single Channel Method. Remote Sens. 2014, 6, 9829–9852. [Google Scholar] [CrossRef]
- Cook, M.; Schott, J.R.; Mandel, J.; Raqueno, N. Development of an Operational Calibration Methodology for the Landsat Thermal Data Archive and Initial Testing of the Atmospheric Compensation Component of a Land Surface Temperature (LST) Product from the Archive. Remote Sens. 2014, 6, 11244–11266. [Google Scholar] [CrossRef]
- Wan, Z. New refinements and validation of the MODIS land-surface temperature/emissivity products. Remote Sens. Environ. 2008, 112, 59–74. [Google Scholar] [CrossRef]
- Wan, Z.; Zhang, Y.; Zhang, Q.; Li, Z.-L. Quality assessment and validation of the MODIS global land surface temperature. Int. J. Remote Sens. 2004, 25, 261–274. [Google Scholar] [CrossRef]
- Shi, C.; Wang, N.; Zhang, Q.; Liu, Z.; Zhu, X. A Comprehensive Flexible Spatiotemporal DAta Fusion Method (CFSDAF) for Generating High Spatiotemporal Resolution Land Surface Temperature in Urban Area. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 9885–9899. [Google Scholar] [CrossRef]
- Xiong, Y.; Huang, S.; Chen, F.; Ye, H.; Wang, C.; Zhu, C. The Impacts of Rapid Urbanization on the Thermal Environment: A Remote Sensing Study of Guangzhou, South China. Remote Sens. 2012, 4, 2033–2056. [Google Scholar] [CrossRef]
- Ye, X.J.; Zhou, Z.P.; Lian, Z.W.; Liu, H.M.; Li, C.Z.; Liu, Y.M. Field study of a thermal environment and adaptive model in Shanghai. Indoor Air 2006, 16, 320–326. [Google Scholar] [CrossRef]
- Wang, Q.; Atkinson, P.M. Spatio-temporal fusion for daily Sentinel-2 images. Remote Sens. Environ. 2018, 204, 31–42. [Google Scholar] [CrossRef]
- Li, Y.; Ren, Y.; Gao, W.; Jia, J.; Tao, S.; Liu, X. An enhanced spatiotemporal fusion method—Implications for DNN based time-series LAI estimation by using Sentinel-2 and MODIS. Field Crops Res. 2022, 279, 108452. [Google Scholar] [CrossRef]
- Qiu, Y.; Zhou, J.; Chen, J.; Chen, X. Spatiotemporal fusion method to simultaneously generate full-length normalized difference vegetation index time series (SSFIT). Int. J. Appl. Earth Obs. Geoinf. 2021, 100, 102333. [Google Scholar] [CrossRef]
- Xu, C.; Du, X.; Yan, Z.; Zhu, J.; Xu, S.; Fan, X. VSDF: A variation-based spatiotemporal data fusion method. Remote Sens. Environ. 2022, 283, 113309. [Google Scholar] [CrossRef]
- Tobler, W.R. A computer movie simulating urban growth in the Detroit region. Econ. Geogr. 1970, 46, 234–240. [Google Scholar] [CrossRef]
- Deng, C.; Wu, C. Examining the impacts of urban biophysical compositions on surface urban heat island: A spectral unmixing and thermal mixing approach. Remote Sens. Environ. 2013, 131, 262–274. [Google Scholar] [CrossRef]
- Peng, J.; Jia, J.L.; Liu, Y.X.; Li, H.L.; Wu, J.S. Seasonal contrast of the dominant factors for spatial distribution of land surface temperature in urban areas. Remote Sens. Environ. 2018, 215, 255–267. [Google Scholar] [CrossRef]
- Mirezi, B.; Kaçıranlar, S.; Özbay, N. A minimum matrix valued risk estimator combining restricted and ordinary least squares estimators. Commun. Stat.-Theor. Methods 2023, 52, 1580–1590. [Google Scholar] [CrossRef]
- Dadashpoor, H.; Azizi, P.; Moghadasi, M. Land use change, urbanization, and change in landscape pattern in a metropolitan area. Sci. Total Environ. 2019, 655, 707–719. [Google Scholar] [CrossRef] [PubMed]
- Shen, H.; Wu, P.; Liu, Y.; Ai, T.; Wang, Y.; Liu, X. A spatial and temporal reflectance fusion model considering sensor observation differences. Int. J. Remote Sens. 2013, 34, 4367–4383. [Google Scholar] [CrossRef]
- Bechtel, B. Robustness of Annual Cycle Parameters to Characterize the Urban Thermal Landscapes. IEEE Geosci. Remote Sens. Lett. 2012, 9, 876–880. [Google Scholar] [CrossRef]
- Jia, D.; Cheng, C.; Song, C.; Shen, S.; Ning, L.; Zhang, T. A Hybrid Deep Learning-Based Spatiotemporal Fusion Method for Combining Satellite Images with Different Resolutions. Remote Sens. 2021, 13, 645. [Google Scholar] [CrossRef]
- Jia, D.; Song, C.; Cheng, C.; Shen, S.; Ning, L.; Hui, C. A Novel Deep Learning-Based Spatiotemporal Fusion Method for Combining Satellite Images with Different Resolutions Using a Two-Stream Convolutional Neural Network. Remote Sens. 2020, 12, 698. [Google Scholar] [CrossRef]
- Wang, Q.; Peng, K.; Tang, Y.; Tong, X.; Atkinson, P.M. Blocks-removed spatial unmixing for downscaling MODIS images. Remote Sens. Environ. 2021, 256, 112325. [Google Scholar] [CrossRef]
- Guo, D.; Shi, W.; Zhang, H.; Hao, M. A Flexible Object-Level Processing Strategy to Enhance the Weight Function-Based Spatiotemporal Fusion Method. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Zhu, X.; Zhan, W.; Zhou, J.; Chen, X.; Liang, Z.; Xu, S.; Chen, J. A novel framework to assess all-round performances of spatiotemporal fusion models. Remote Sens. Environ. 2022, 274, 113002. [Google Scholar] [CrossRef]
- Meng, Q.; Wang, C.; Gu, X.; Sun, Y.; Zhang, Y.; Vatseva, R.; Jancso, T. Hot dark spot index method based on multi-angular remote sensing for leaf area index retrieval. Environ. Earth Sci. 2016, 75, 732. [Google Scholar] [CrossRef]
- Wong, T.-T. Performance evaluation of classification algorithms by k-fold and leave-one-out cross validation. Pattern. Recognit. 2015, 48, 2839–2846. [Google Scholar] [CrossRef]
- Shi, W.; Guo, D.; Zhang, H. A reliable and adaptive spatiotemporal data fusion method for blending multi-spatiotemporal-resolution satellite images. Remote Sens. Environ. 2022, 268, 112770. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, J.; Liang, S.; Wang, D. A practical reanalysis data and thermal infrared remote sensing data merging (RTM) method for reconstruction of a 1-km all-weather land surface temperature. Remote Sens. Environ. 2021, 260, 112437. [Google Scholar] [CrossRef]
- Liu, M.; Ke, Y.; Yin, Q.; Chen, X.; Im, J. Comparison of five spatio-temporal satellite image fusion models over landscapes with various spatial heterogeneity and temporal variation. Remote Sens. 2019, 11, 2612. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, J.; Chen, X.; Zhu, X.; Qiu, Y.; Song, H.; Rao, Y.; Zhang, C.; Cao, X.; Cui, X. Sensitivity of six typical spatiotemporal fusion methods to different influential factors: A comparative study for a normalized difference vegetation index time series reconstruction. Remote Sens. Environ. 2021, 252, 112130. [Google Scholar] [CrossRef]
- Keramitsoglou, I.; Sismanidis, P.; Analitis, A.; Butler, T.; Founda, D.; Giannakopoulos, C.; Giannatou, E.; Karali, A.; Katsouyanni, K.; Kendrovski, V.; et al. Urban thermal risk reduction: Developing and implementing spatially explicit services for resilient cities. Sustain. Cities Soc. 2017, 34, 56–68. [Google Scholar] [CrossRef]
- Deng, X.; Cao, Q.; Wang, L.; Wang, W.; Wang, S.; Wang, L. Understanding the Impact of Urban Expansion and Lake Shrinkage on Summer Climate and Human Thermal Comfort in a Land-Water Mosaic Area. J. Geophys. Res. Atmos. 2022, 127, e2021JD036131. [Google Scholar] [CrossRef]
- Gong, P.; Liu, H.; Zhang, M.; Li, C.; Wang, J.; Huang, H.; Clinton, N.; Ji, L.; Li, W.; Bai, Y.; et al. Stable classification with limited sample: Transferring a 30-m resolution sample set collected in 2015 to mapping 10-m resolution global land cover in 2017. Sci. Bull. 2019, 64, 370–373. [Google Scholar] [CrossRef]
- Gong, Y.; Li, H.; Shen, H.; Meng, C.; Wu, P. Cloud-covered MODIS LST reconstruction by combining assimilation data and remote sensing data through a nonlocality-reinforced network. Int. J. Appl. Earth Obs. Geoinf. 2023, 117, 103195. [Google Scholar] [CrossRef]
- Beltrán-Marcos, D.; Suárez-Seoane, S.; Fernández-Guisuraga, J.M.; Fernández-García, V.; Marcos, E.; Calvo, L. Relevance of UAV and sentinel-2 data fusion for estimating topsoil organic carbon after forest fire. Geoderma 2023, 430, 116290. [Google Scholar] [CrossRef]
- Li, Y.; Yan, W.; An, S.; Gao, W.; Jia, J.; Tao, S.; Wang, W. A Spatio-Temporal Fusion Framework of UAV and Satellite Imagery for Winter Wheat Growth Monitoring. Drones 2023, 7, 23. [Google Scholar] [CrossRef]
- Arabi Aliabad, F.; Ghafarian Malmiri, H.; Sarsangi, A.; Sekertekin, A.; Ghaderpour, E. Identifying and Monitoring Gardens in Urban Areas Using Aerial and Satellite Imagery. Remote Sens. 2023, 15, 4053. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| AD | Average difference |
| AAD | Average absolute difference |
| APA | All-round performance assessment |
| GAN | Generative adversarial network |
| GAN-STFM | GAN-based spatiotemporal fusion model |
| LBP | Local binary patterns |
| LOOCV | Leave-one-out cross-validation |
| LST | Land surface temperature |
| LOTSFM | Long time-series spatiotemporal fusion model |
| LTRM | Long time-series regression model |
| MODIS | Moderate resolution imaging spectroradiometer |
| MPF | Missing pixel filling |
| OLS | Ordinary least squares |
| PCCs | Pearson correlation coefficients |
| RC | Residual compensation |
| RMSE | Root-mean-square error |
| SDE | Sensor difference term estimation |
| SF | Spatial filtering |
| STARFM | Spatial and temporal adaptive reflectance fusion model |
| Coarse image | Image with relatively low spatial resolution; |
| Coarse pixel | Pixel in the coarse image; |
| Fine image | Image with relatively high spatial resolution; |
| Fine pixel | Pixel in the fine image; |
| Image pair | Coarse and fine image of the same location on the same date; |
| defined as Equation (6) | |
| Time-series pixel regression parameters | |
| Time-series fitting parameters for sensor difference terms | |
| , | Fit residuals |
| Beijing | Shanghai | Guangzhou | |||
|---|---|---|---|---|---|
| Image ID | Date | Image ID | Date | Image ID | Date |
| MOD1-L1 | 2014.09.04 | MOD1-L1 | 2013.05.25 | MYD1-L1 | 2013.11.29 |
| MOD2-L2 | 2014.10.06 | MOD2-L2 | 2013.07.12 | MYD2-L2 | 2013.12.31 |
| MOD3-L3 | 2015.04.16 | MOD3-L3 | 2013.08.13 | MYD3-L3 | 2014.01.16 |
| MOD4-L4 | 2015.05.18 | MOD4-L4 | 2013.11.17 | MYD4-L4 | 2014.10.15 |
| MOD5-L5 | 2017.05.07 | MOD5-L5 | 2013.12.03 | MYD5-L5 | 2014.11.16 |
| MOD6-L6 | 2017.07.10 | MOD6-L6 | 2014.11.04 | MYD6-L6 | 2015.01.03 |
| MOD7-L7 | 2017.09.12 | MOD7-L7 | 2015.03.12 | MYD7-L7 | 2015.01.19 |
| MOD8-L8 | 2017.09.28 | MOD8-L8 | 2015.08.03 | MYD8-L8 | 2015.10.18 |
| MOD9-L9 | 2017.10.30 | MOD9-L9 | 2016.01.26 | MYD9-L9 | 2016.02.07 |
| MOD10-L10 | 2018.04.08 | MOD10-L10 | 2017.02.13 | MYD10-L10 | 2016.12.07 |
| MOD11-L11 | 2018.10.01 | MOD11-L11 | 2017.04.02 | MYD11-L11 | 2017.10.23 |
| MOD12-L12 | 2018.10.17 | MOD12-L12 | 2017.08.24 | MYD12-L12 | 2019.09.27 |
| MOD13-L13 | 2019.05.29 | MOD13-L13 | 2018.03.04 | MYD13-L13 | 2019.10.29 |
| MOD14-L14 | 2019.06.14 | MOD14-L14 | 2018.05.23 | MYD14-L14 | 2019.11.14 |
| MOD15-L15 | 2019.09.02 | MOD15-L15 | 2018.12.17 | MYD15-L15 | 2020.02.18 |
| MOD16-L16 | 2019.09.18 | MOD16-L16 | 2019.01.18 | MYD16-L16 | 2021.01.19 |
| MOD17-L17 | 2020.04.13 | MOD17-L17 | 2019.07.29 | MYD17-L17 | 2021.02.04 |
| MOD18-L18 | 2020.08.03 | MOD18-L18 | 2019.12.04 | MYD18-L18 | 2021.02.20 |
| MOD19-L19 | 2020.09.20 | MOD19-L19 | 2020.01.21 | MYD19-L19 | 2021.12.05 |
| MOD20-L20 | 2021.05.02 | MOD20-L20 | 2020.02.22 | MYD20-L20 | 2022.09.03 |
| MOD21-L21 | 2021.06.03 | MOD21-L21 | 2020.05.12 | MYD21-L21 | 2022.10.21 |
| MOD22-L22 | 2021.06.19 | MOD22-L22 | 2020.08.16 | ||
| MOD23-L23 | 2021.09.07 | MOD23-L23 | 2021.04.29 | ||
| MOD24-L24 | 2022.01.29 | MOD24-L24 | 2022.01.02 | ||
| MOD25-L25 | 2022.03.02 | MOD25-L25 | 2022.02.27 | ||
| MOD26-L26 | 2022.03.26 | MOD26-L26 | 2022.03.15 | ||
| MOD27-L27 | 2022.04.19 | MOD27-L27 | 2022.03.23 | ||
| MOD28-L28 | 2022.05.13 | MOD28-L28 | 2022.04.08 | ||
| MOD29-L29 | 2022.05.21 | MOD29-L29 | 2022.09.07 |
| City | Statistic | AD | RMSE | EDGE | LBP |
|---|---|---|---|---|---|
| Beijing | Average value | 0.006038 | 1.603804 | −0.206396 | −0.000472 |
| Standard deviation | 1.090600 | 0.599686 | 0.044764 | 0.002536 | |
| Shanghai | Average value | 0.052643 | 2.169908 | −0.151468 | −0.000344 |
| Standard deviation | 2.104711 | 1.207505 | 0.033107 | 0.004028 | |
| Guangzhou | Average value | −0.129306 | 1.715259 | −0.093829 | −0.001072 |
| Standard deviation | 1.687730 | 1.058368 | 0.020060 | 0.001607 |
| Image Date | 2017/5/7 | 2018/4/8 | ||||||
|---|---|---|---|---|---|---|---|---|
| Metric | AD | RMSE | EDGE | LBP | AD | RMSE | EDGE | LBP |
| STARFM | −0.1530 | 2.8298 | −0.2935 | 0.0018 | −2.9707 | 3.3658 | −0.3530 | −0.0166 |
| ESTARFM | −0.1428 | 2.5451 | −0.2182 * | −0.0022 | −1.7855 | 2.5301 | −0.2278 | −0.0113 |
| FSDAF | 0.3246 | 2.8239 | −0.2580 | −0.0084 | −2.8314 | 3.3243 | −0.4500 | −0.0376 |
| GAN-STFM | 1.0141 | 3.0614 | −0.4539 | −0.0040 | −1.7510 | 2.2203 | −0.4331 | 0.0060 |
| LOTSFM | −0.0547 * | 1.7850 * | −0.2580 | −0.0017 * | −0.7164 * | 1.5016 * | −0.2211 * | −0.0050 * |
| Image Date | 2019/9/2 | 2022/1/29 | ||||||
| Metric | AD | RMSE | EDGE | LBP | AD | RMSE | EDGE | LBP |
| STARFM | −2.5883 | 2.8231 | −0.2486 | −0.0039 | 1.9178 | 2.1979 | −0.3586 | 0.0069 |
| ESTARFM | −0.1020 * | 0.9795 * | −0.0856 * | −0.0014 * | 3.0526 | 3.6576 | −0.1013 * | 0.0005 |
| FSDAF | −2.3037 | 2.5587 | −0.1911 | −0.0074 | 2.0815 | 2.3886 | −0.2895 | 0.0004 * |
| GAN-STFM | −0.7339 | 1.3711 | −0.2766 | 0.0051 | 0.5294 | 1.3492 | −0.5593 | −0.0020 |
| LOTSFM | −0.6541 | 1.1527 | −0.1162 | 0.0014 * | 0.2087 * | 1.3394 * | −0.2971 | 0.0040 |
| Image Date | 2017.05.07 | 2018.04.08 | 2019.09.02 | 2022.01.29 | ||||
|---|---|---|---|---|---|---|---|---|
| Fusion Stage | Train | Predict | Train | Predict | Train | Predict | Train | Predict |
| STARFM | - | 141 s | - | 142 s | - | 142 s | - | 146 s |
| ESTARFM | - | 1336 s | - | 1455 s | - | 1421 s | - | 1958 s |
| FSDAF | - | 873 s | - | 885 s | - | 918 s | - | 915 s |
| GAN-STFM | 50,220 s | 0.70 s | - | 0.71 s | - | 0.70 s | - | 0.70 s |
| LOTSFM | 247 s | 0.05 s | - | 0.05 s | - | 0.05 s | - | 0.05 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Zhang, L.; Hu, X.; Meng, Q.; Qian, J.; Gao, J. A Spatiotemporal Fusion Model of Land Surface Temperature Based on Pixel Long Time-Series Regression: Expanding Inputs for Efficient Generation of Robust Fused Results. Remote Sens. 2023, 15, 5211. https://doi.org/10.3390/rs15215211
Chen S, Zhang L, Hu X, Meng Q, Qian J, Gao J. A Spatiotemporal Fusion Model of Land Surface Temperature Based on Pixel Long Time-Series Regression: Expanding Inputs for Efficient Generation of Robust Fused Results. Remote Sensing. 2023; 15(21):5211. https://doi.org/10.3390/rs15215211
Chicago/Turabian StyleChen, Shize, Linlin Zhang, Xinli Hu, Qingyan Meng, Jiangkang Qian, and Jianfeng Gao. 2023. "A Spatiotemporal Fusion Model of Land Surface Temperature Based on Pixel Long Time-Series Regression: Expanding Inputs for Efficient Generation of Robust Fused Results" Remote Sensing 15, no. 21: 5211. https://doi.org/10.3390/rs15215211