Design, Development and Implementation of the Position Estimator Algorithm for Harmonic Motion on the XY Flexural Mechanism for High Precision Positioning


Abstract
:1. Introduction
2. Position Estimator Algorithm
2.1. Position Estimator Logic
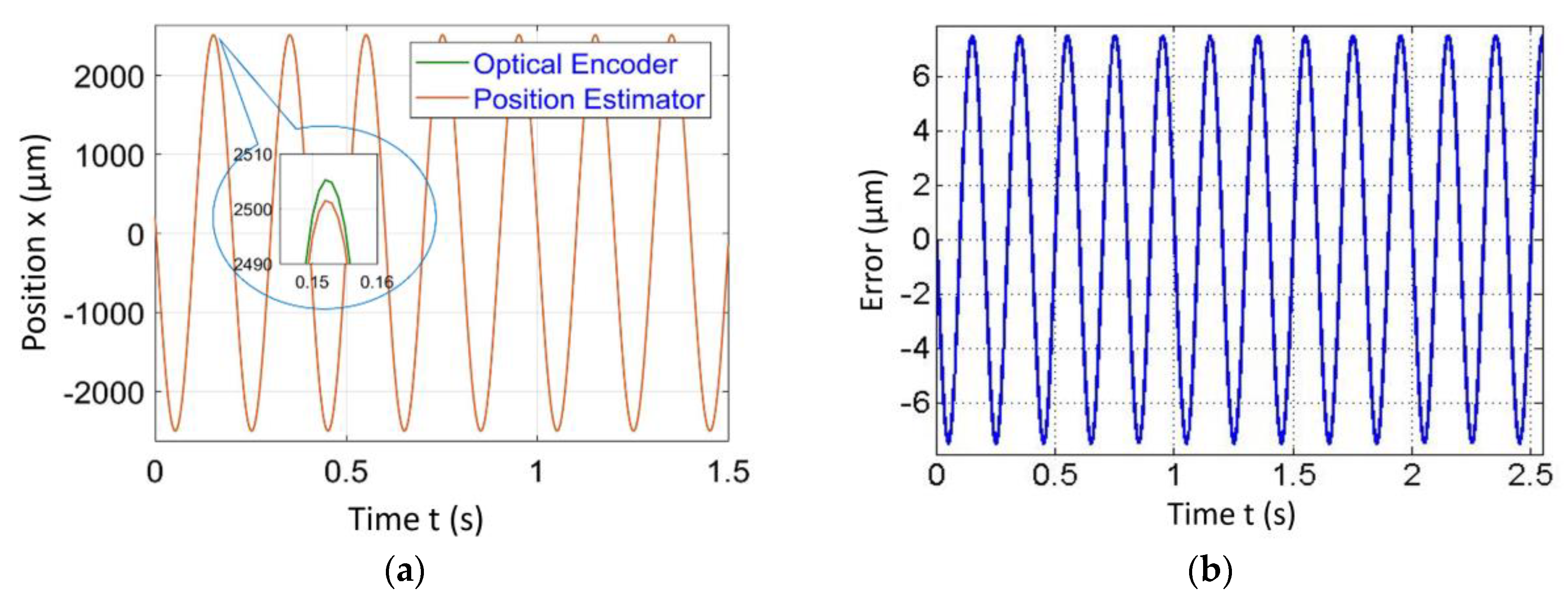
2.2. MATLAB Simulation of Position Estimator
2.3. Simulink Model
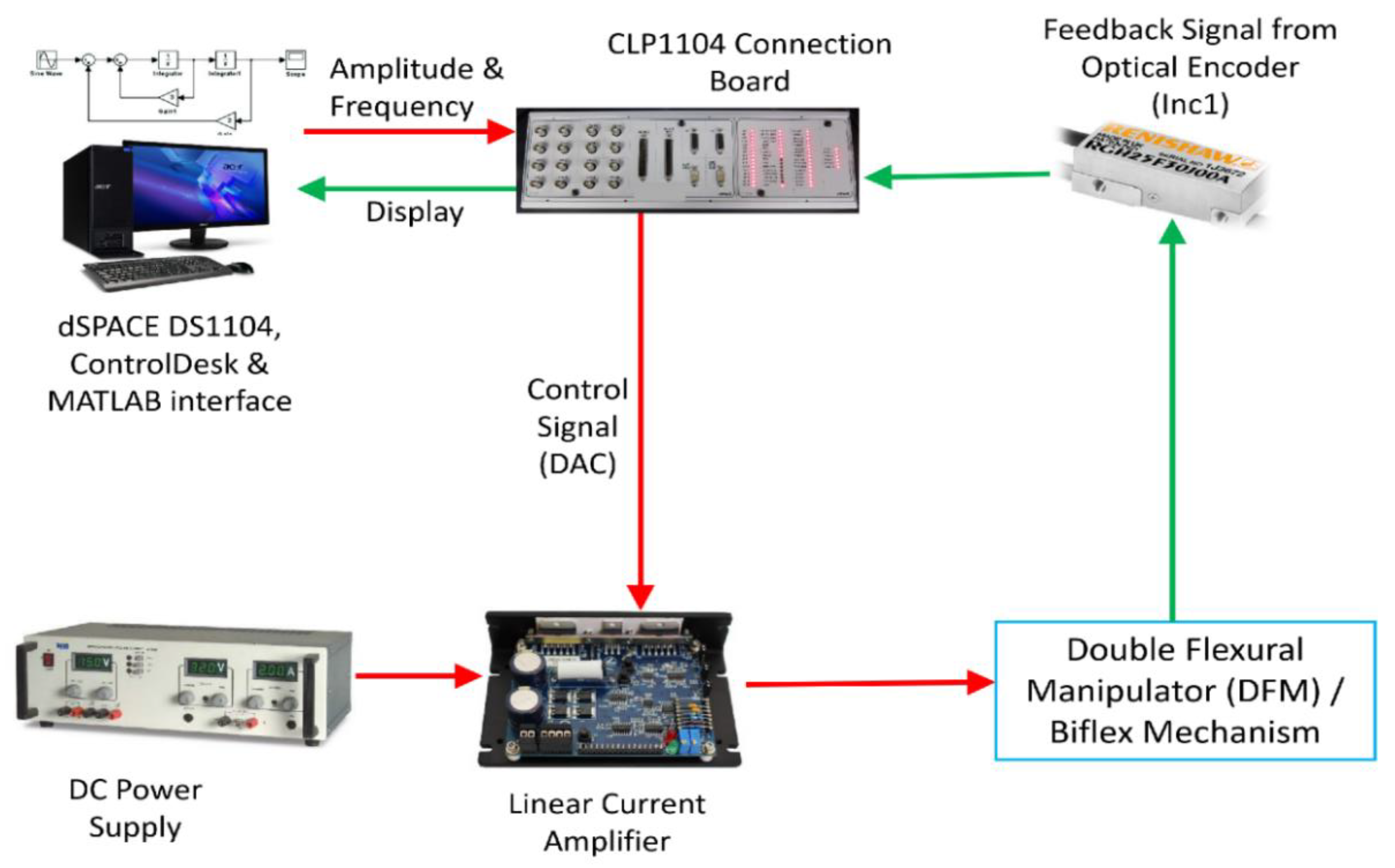
3. Development of the Experimental Setup
Biflex Mechanism
4. System Identification
4.1. Static Analysis
4.2. Dynamic Analysis
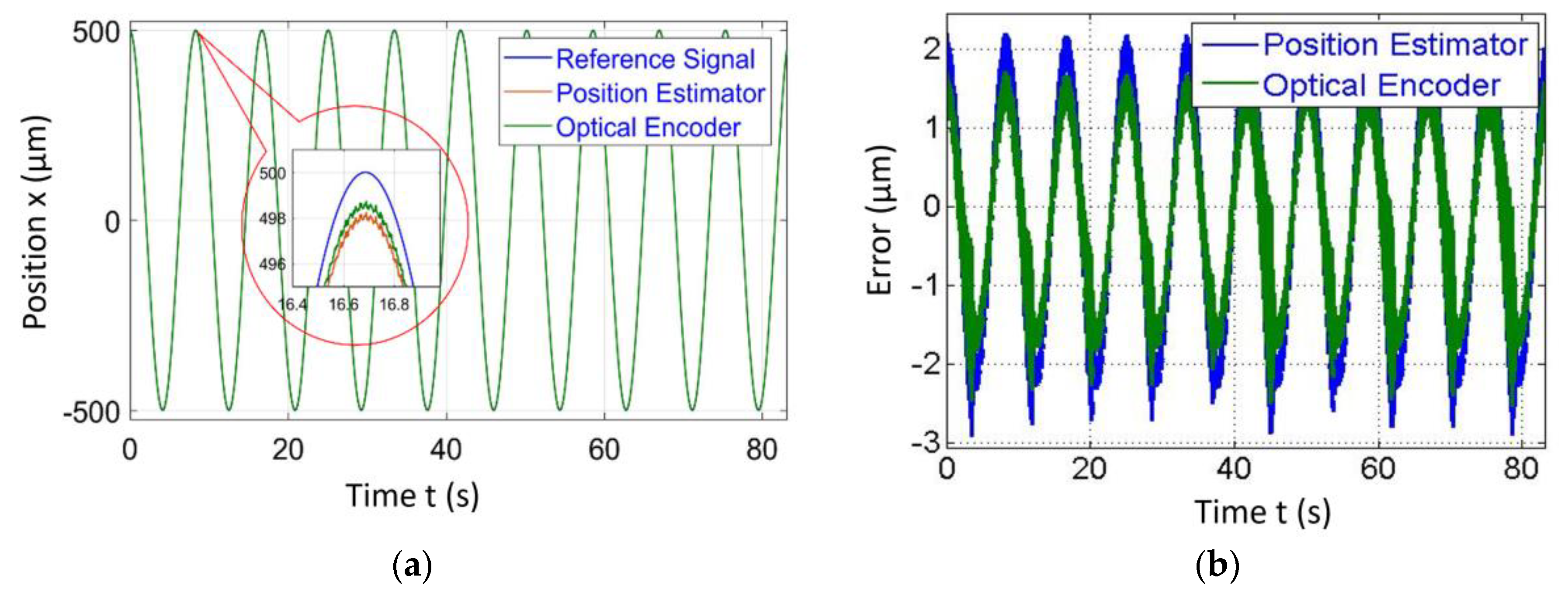
5. Experimental Validation of the Position Estimator Algorithm
6. PID Control Implementation
7. XY Scanning Using the Position Estimator Algorithm
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Slocum, A. Bearings with mechanical contact between elements. In Precision Machine Design; Proc. Society of Manufacturing Engineers: Dearborn, MI, USA, 1992. [Google Scholar]
- Awtar, S. Synthesis and Analysis of Parallel Kinematic XY Flexure Mechanisms. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2004. [Google Scholar]
- Awtar, S.; Slocum, A.H. A large range XY flexure stage for nanopositioning. In Proceedings of the EUSPEN 2005—The 5th International Conference of the European Society for Precision Engineering and Nanotechnology, Montpellier, France, 8–11 May 2005. [Google Scholar]
- Awtar, S.; Shimotsu, K.; Sen, S. Elastic averaging in flexure mechanisms: A three-beam parallelogram flexure case study. J. Mech. Robot. 2010, 2, 041006. [Google Scholar] [CrossRef] [Green Version]
- Awtar, S.; Slocum, A.H. Constraint-based design of parallel kinematic XY flexure mechanisms. J. Mech. Des. 2007, 129, 816. [Google Scholar] [CrossRef]
- Glenn, B.C.; Bouton, C.E. Sensorless position control of a linear voice-coil transducer using sliding mode observers. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 7–10 March 2005; Volume 5757. [Google Scholar]
- Choi, Y.M.; Gweon, D.-G. A high-precision dual-servo stage using halbach linear active magnetic bearings. IEEE/ASME Trans. Mechatron. 2011, 16, 925–931. [Google Scholar] [CrossRef]
- Chung, G.-J.; Choi, K.-B. Development of Nano Order Manipulation System Based on 3-PPR Planar Parallel Mechanism; IEEE: Shenyang, China, 2004; pp. 612–616. [Google Scholar]
- Ito, S.; Schitter, G. Comparison and classification of high-precision actuators based on stiffness influencing vibration isolation. IEEE/ASME Trans. Mechatron. 2016, 21, 1169–1178. [Google Scholar] [CrossRef]
- Ito, S.; Steininger, J.; Schitter, G. Low-stiffness dual stage actuator for long rage positioning with nanometer resolution. Mechatronics 2015, 29, 46–56. [Google Scholar] [CrossRef]
- Huang, J.-M.; Liu, A.Q.; Deng, Z.L.; Zhang, Q.X.; Ahn, J.; Asundi, A. An approach to the coupling effect between torsion and bending for electrostatic torsional micromirrors. Sens. Actuators A Phys. 2004, 115, 159–167. [Google Scholar] [CrossRef]
- Freire Gómez, J.; Booker, J.D.; Mellor, P.H. 2D shape optimization of leaf-type crossed flexure pivot springs for minimum stress. Precis. Eng. 2015, 42, 6–21. [Google Scholar] [CrossRef]
- Pinskier, J.; Shirinzadeh, B.; Clark, L.; Qin, Y.; Fatikow, S. Design, development and analysis of a haptic-enabled modular flexure-based manipulator. Mechatronics 2016, 40, 156–166. [Google Scholar] [CrossRef]
- Kim, J.-J.; Choi, Y.-M.; Ahn, D.; Hwang, B.; Gweon, D.-G.; Jeong, J. A millimeter-range flexure-based nano-positioning stage using a self-guided displacement amplification mechanism. Mech. Mach. Theory 2012, 50, 109–120. [Google Scholar] [CrossRef]
- Kenton, B.J.; Leang, K.K. Flexure design using metal matrix composite materials: Nanopositioning example. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–19 May 2012; pp. 4768–4773. [Google Scholar]
- Chen, K.-S.; Trumper, D.L.; Smith, S.T. Design and control for an electromagnetically driven X–Y–θ stage. Precis. Eng. 2002, 26, 355–369. [Google Scholar] [CrossRef]
- Lai, L.; Gu, G.-Y.; Li, P.; Zhu, L.M. Design of a decoupled 2-DOF translational parallel micro-positioning stage. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5070–5075. [Google Scholar]
- Chen, M.-Y.; Huang, H.-H.; Hung, S.-K. A new design of a submicropositioner utilizing electromagnetic actuators and flexure mechanism. IEEE Trans. Ind. Electron. 2010, 57, 96–106. [Google Scholar] [CrossRef]
- Lin, R.; Zhang, X.; Long, X.; Fatikow, S. Hybrid flexure hinges. Rev. Sci. Instrum. 2013, 84, 085004. [Google Scholar] [CrossRef] [PubMed]
- Luharuka, R.; Hesketh, P.J. Design of fully compliant, in-plane rotary, bistable micromechanisms for MEMS applications. Sens. Actuators A Phys. 2007, 134, 231–238. [Google Scholar] [CrossRef]
- Korayem, M.H.; Sadeghzadeh, S.; Homayooni, A. Semi-analytical motion analysis of nano-steering devices, segmented piezotube scanners. Int. J. Mech. Sci. 2011, 53, 536–548. [Google Scholar] [CrossRef]
- Ohsaki, M.; Nishiwaki, S. Shape design of pin-jointed multistable compliant mechanisms using snapthrough behavior. Struct. Multidiscip. Optim. 2005, 30, 327–334. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Yeatman, E.M.; Rao, G.K.; Holmes, A.S.; Green, T.C. Energy harvesting from human and machine motion for wireless electronic devices. Proc. IEEE 2008, 96, 1457–1486. [Google Scholar] [CrossRef] [Green Version]
- Santer, M.; Pellegrino, S. Compliant multistable structural elements. Int. J. Solids Struct. 2008, 45, 6190–6204. [Google Scholar] [CrossRef] [Green Version]
- Olfatnia, M.; Cui, L.; Chopra, P.; Awtar, S. Large range dual-axis micro-stage driven by electrostatic comb-drive actuators. J. Micromech. Microeng. 2013, 23, 105008. [Google Scholar] [CrossRef] [Green Version]
- Liu, P.; Yan, P.; Zhang, Z. Design and analysis of an X–Y parallel nanopositioner supporting large-stroke servomechanism. Proc. Inst. Mech. Eng. Part C: J. Mech. Eng. Sci. 2015, 229, 364–376. [Google Scholar] [CrossRef]
- Mulik, S.S.; Deshmukh, S.P.; Shewale, M.S.; Zambare, H.B.; Sundare, A.P. Design and implementation of position estimator algorithm on double flexural manipulator. In Proceedings of the 2017 International Conference on Nascent Technologies in Engineering Field (ICNTE 2017), Navi Mumbai, India, 27–28 January 2017; pp. 1–5. [Google Scholar]
- Deshmukh, S.P.; Zambare, H.; Mate, K.; Shewale, M.S.; Khan, Z. System identification and PID implementation on Double Flexural Manipulator. In Proceedings of the 2015 International Conference on Nascent Technologies in the Engineering Field (ICNTE 2015), Navi Mumbai, India, 9–10 January 2015; pp. 1–5. [Google Scholar]
- Schitter, G.; Astrom, K.J.; DeMartini, B.E.; Thurner, P.J.; Turner, K.L.; Hansma, P.K. Design and Modeling of a High-Speed AFM-Scanner. IEEE Trans. Control. Syst. Technol. 2007, 15, 906–915. [Google Scholar] [CrossRef]
- Awtar, S.; Slocum, A.H.; Sevincer, E. Characteristics of Beam-Based Flexure Modules. J. Mech. Des. 2007, 129, 625. [Google Scholar] [CrossRef] [Green Version]
- Tuma, T.; Haeberle, W.; Rothuizen, H.; Lygeros, J.; Pantazi, A.; Sebastian, A. A dual-stage nanopositioning approach to high-speed scanning probe microscopy. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Wailea, HI, USA, 10–13 December 2012; pp. 5079–5084. [Google Scholar]
- Wang, W.; Han, C.; Choi, H. 2-DOF kinematic XY stage design based on flexure element. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 1412–1417. [Google Scholar]
- Xiao, S.; Li, Y. Optimal design, fabrication, and control of an XY micropositioning stage driven by electromagnetic actuators. IEEE Trans. Ind. Electron. 2013, 60, 4613–4626. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. A novel piezoactuated XY stage with parallel, decoupled, and stacked flexure structure for micro-/nanopositioning. IEEE Trans. Ind. Electron. 2011, 58, 3601–3615. [Google Scholar] [CrossRef]
- Li, Y.; Xu, Q. Design and analysis of a totally decoupled flexure-based XY parallel micromanipulator. IEEE Trans. Robot. 2009, 25, 645–657. [Google Scholar]
- Yao, Q.; Dong, J.; Ferreira, P.M. Design, analysis, fabrication and testing of a parallel-kinematic micropositioning XY stage. Int. J. Mach. Tools Manuf. 2007, 47, 946–961. [Google Scholar] [CrossRef]
- Yong, Y.K.; Moheimani, S.O.R.; Kenton, B.J.; Leang, K.K. Invited review article: High-speed flexure-guided nanopositioning: Mechanical design and control issues. Rev. Sci. Instrum. 2012, 83, 121101. [Google Scholar] [CrossRef]
- Yong, Y.K.; Aphale, S.S.; Reza Moheimani, S.O. Design, identification, and control of a flexure-based XY stage for fast nanoscale positioning. IEEE Trans. Nanotechnol. 2009, 8, 46–54. [Google Scholar] [CrossRef]
- Zhang, Z.; Hu, H. Flexural mechanism design analysis for a new piezoelectric inchworm actuator. In Proceedings of the 2009 International Conference on Measuring Technology and Mechatronics Automation, Zhangjiajie, China, 11–12 April 2009; pp. 98–101. [Google Scholar]
- Dai, G.; Pohlenz, F.; Danzebrink, H.-U.; Xu, M.; Hasche, K.; Wilkening, G. Metrological large range scanning probe microscope. Rev. Sci. Instrum. 2004, 75, 962–969. [Google Scholar] [CrossRef]
- Du, E.; Cui, H.; Zhu, Z. Review of nanomanipulators for nanomanufacturing. Int. J. Nanomanuf. 2006, 1, 83. [Google Scholar] [CrossRef]
- Fleming, A.J.; Leang, K.K. Integrated strain and force feedback for high-performance control of piezoelectric actuators. Sens. Actuators A Phys. 2010, 161, 256–265. [Google Scholar] [CrossRef]
- Barlian, A.A.; Park, W.T.; Mallon, J.; Rastegar, A.J.; Pruitt, B.L. Review: Semiconductor piezoresistance for microsystems. Proc. IEEE 2009, 97, 513–552. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Messenger, R.K.; Aten, Q.T.; McLain, T.W.; Howell, L.L. Piezoresistive feedback control of a MEMS thermal actuator. J. Microelectromech. Syst. 2009, 18, 1267–1278. [Google Scholar] [CrossRef]
- Baxter, L.K. Capacitive Sensors: Design and Applications; IEEE Press: Piscataway, NJ, USA, 1997. [Google Scholar]
- Kim, M.; Moon, W.; Yoon, E.; Lee, K.R. A new capacitive displacement sensor with high accuracy and long-range. Sens. Actuators A Phys. 2006, 14, 135–141. [Google Scholar] [CrossRef]
- Fericean, S.; Droxler, R. New noncontacting inductive analog proximity and inductive linear displacement sensors for industrial automation. IEEE Sens. J. 2007, 7, 1538–1545. [Google Scholar] [CrossRef]
- Proksch, R.; Cleveland, J.; Bocek, D. Linear Variable Differential Transformers for High Precision Position Measurements. U.S. Patent No. 7,262,592, 2 May 2006. [Google Scholar]
- Dukes, J.N.; Gordon, G.B. A two-hundred-foot yardstick with graduations every microinch. Hewlett-Packard J. 1970, 21, 2–8. [Google Scholar]
- Khiat, A.; Lamarque, F.; Prelle, C.; Pouille, P.; Leester-Schädel, M.; Büttgenbach, S. Two-dimension fiber optic sensor for high-resolution and long-range linear measurements. Sens. Actuators A Phys. 2010, 158, 43–50. [Google Scholar] [CrossRef]
- Lee, J.Y.; Chen, H.Y.; Hsu, C.C.; Wu, C.C. Optical heterodyne grating interferometry for displacement measurement with subnanometric resolution. Sens. Actuators A Phys. 2007, 137, 185–191. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sr. No. | Parameter | Value |
|---|---|---|
| 1 | Stiffness (k) | 0.63 N/mm |
| 2 | Damping Coefficient (c) | 0.0345 Ns/mm |
| 3 | Mass (m) | 11.7 × 10−3 kg |
| 4 | Resistance (R) | 9.1 Ω |
| 5 | Inductance (L) | 4.2 mH |
| 6 | Force Sensitivity (α) | 8.81 N/A |
| Amplitude (mm) | Frequency (Hz) | Error (µm) |
|---|---|---|
| 5.5 | 0.1 | ±0.14 |
| 1 | ±0.16 | |
| 5 | ±0.4 | |
| 10 | ±0.6 |
| Parameter of Beam | Range in mm |
|---|---|
| Length | 50–150 |
| Width | 10–30 |
| Thickness | 0.5–1 |
| Parameter | Sensor Used for Validation | Position Estimator Output | |
|---|---|---|---|
| Without PID | With PID | ||
| Scanning range | 15 mm | 15 mm | 15 mm |
| Position Resolution | ±2 μm | ±5 μm @1.5 mm/s | ±2.5 μm @1.5 mm/s |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shewale, M.; Razban, A.; Deshmukh, S.; Mulik, S. Design, Development and Implementation of the Position Estimator Algorithm for Harmonic Motion on the XY Flexural Mechanism for High Precision Positioning. Sensors 2020, 20, 662. https://doi.org/10.3390/s20030662
Shewale M, Razban A, Deshmukh S, Mulik S. Design, Development and Implementation of the Position Estimator Algorithm for Harmonic Motion on the XY Flexural Mechanism for High Precision Positioning. Sensors. 2020; 20(3):662. https://doi.org/10.3390/s20030662
Chicago/Turabian StyleShewale, Mahesh, Ali Razban, Suhas Deshmukh, and Sharad Mulik. 2020. "Design, Development and Implementation of the Position Estimator Algorithm for Harmonic Motion on the XY Flexural Mechanism for High Precision Positioning" Sensors 20, no. 3: 662. https://doi.org/10.3390/s20030662