Brahan Project High Frequency Radar Ocean Measurements: Currents, Winds, Waves and Their Interactions

Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Data Sets

3. Methods
3.1. Current Velocity Mapping

3.2. Wave Height, Period and Direction
3.3. Wind Direction Information
3.3.1. Wind Direction from Integrated First-Order Energy
3.3.2. Wind Direction from Radar Echo Amplitudes
4. Results

4.1. Results for October 30, 00:00 to November 3, 23:30, 2013 UTC
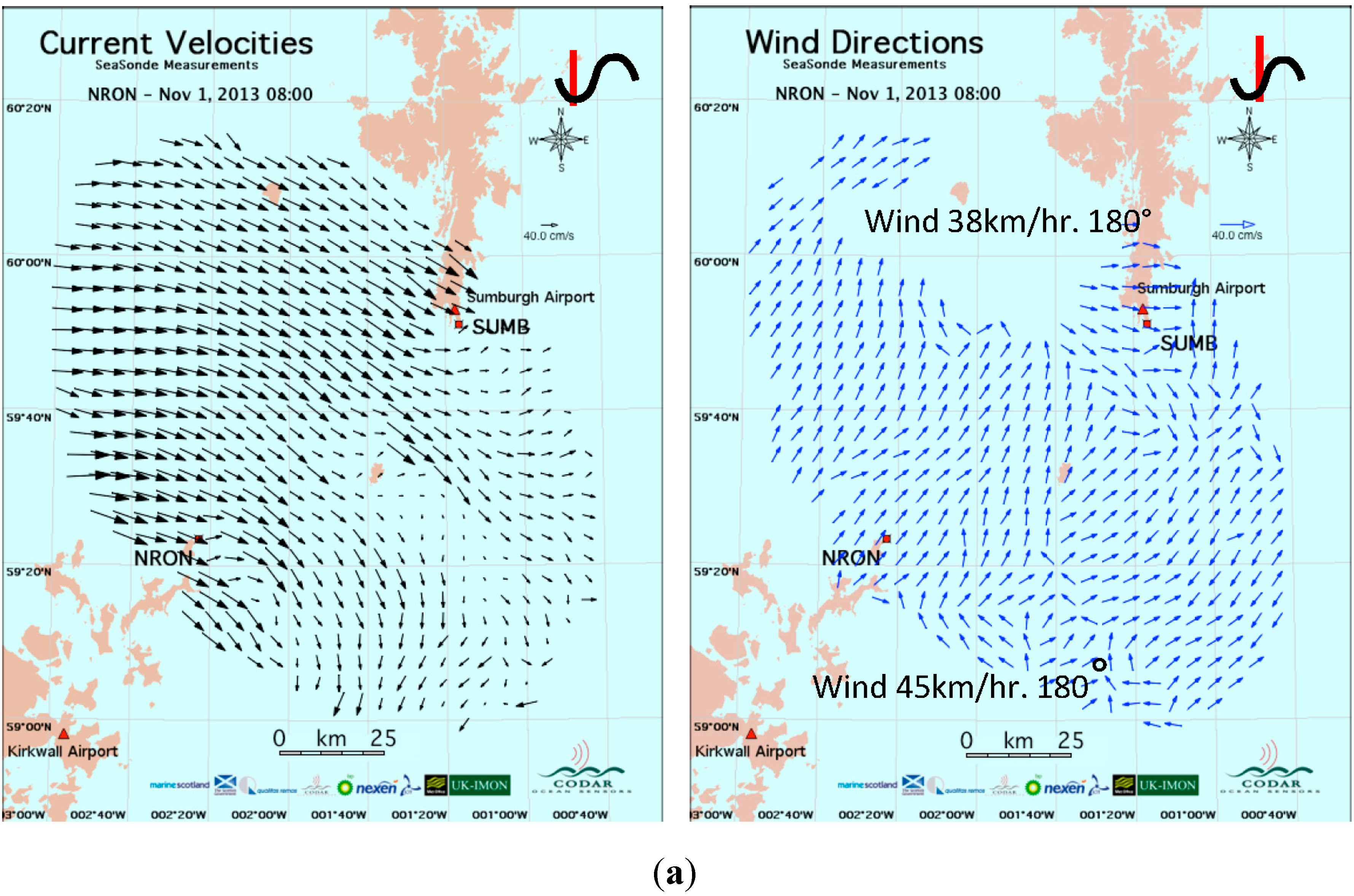
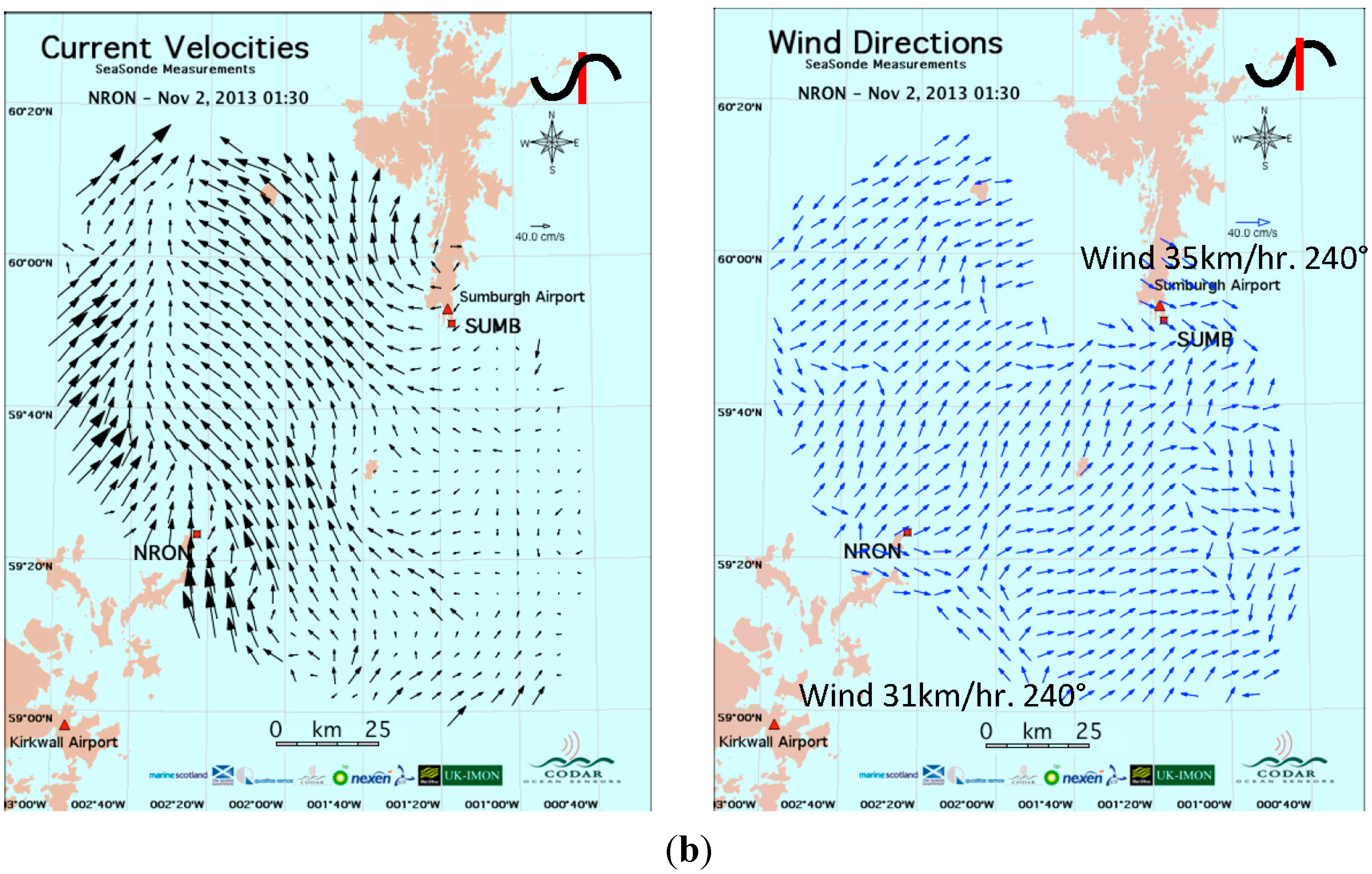
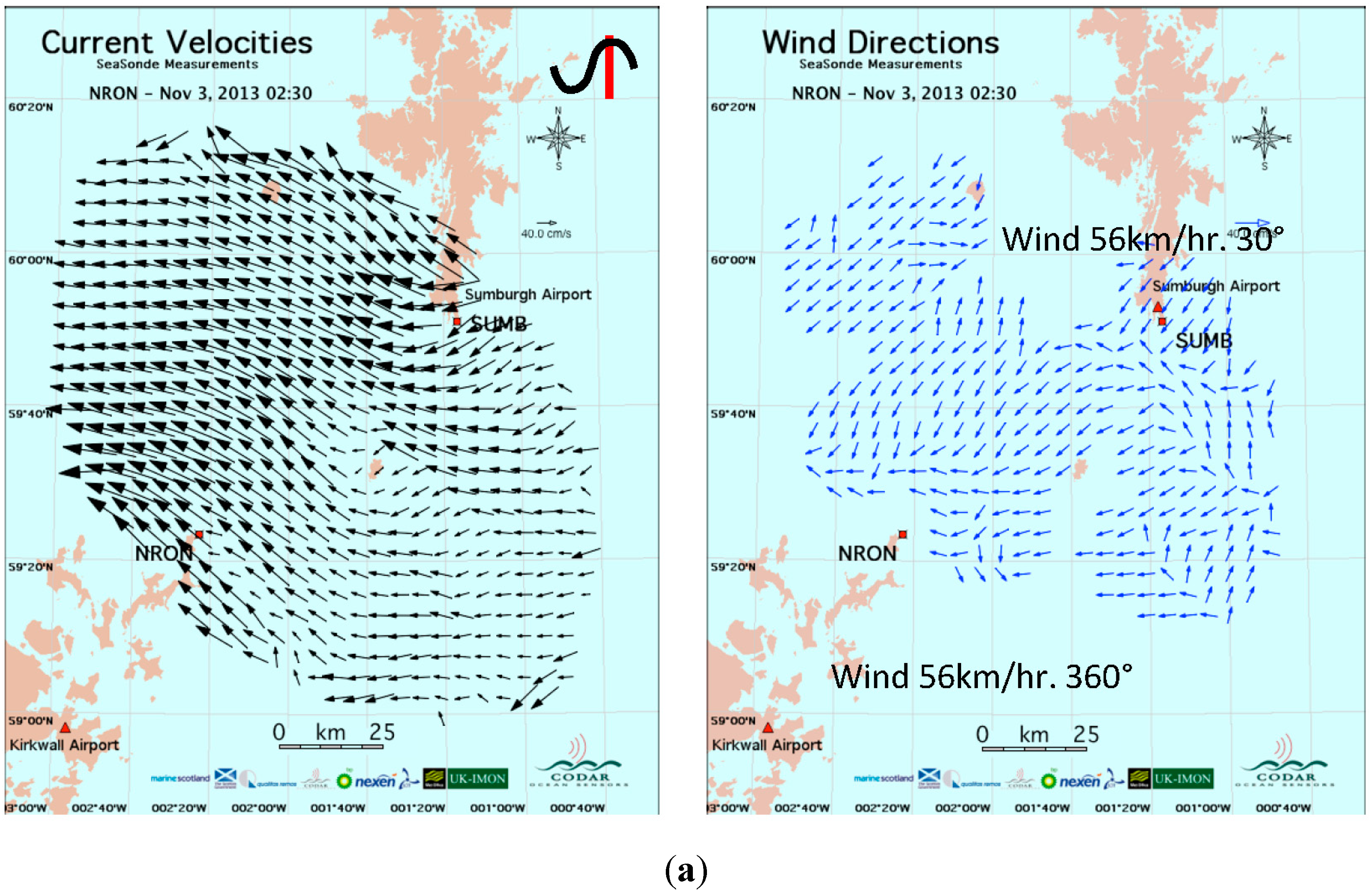
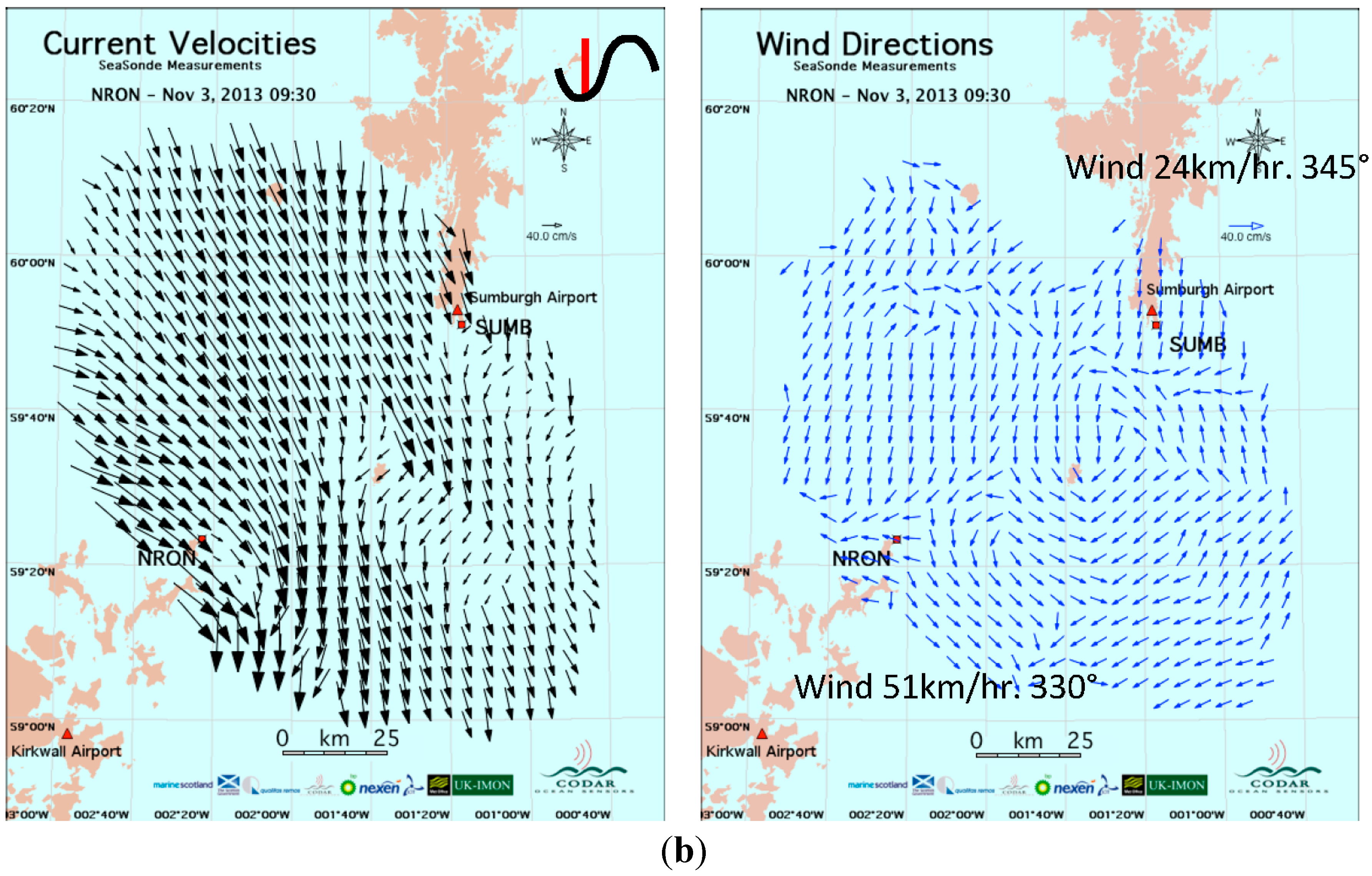
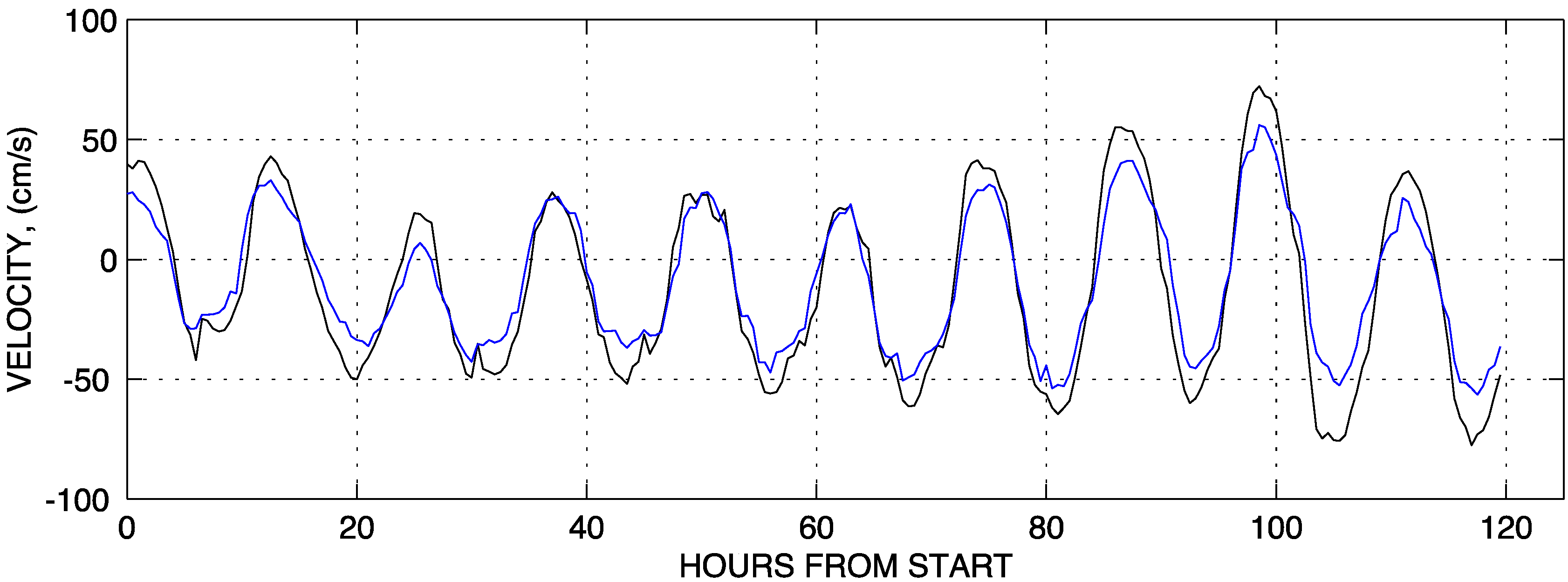
4.1.1. Current Velocity and Wind Direction Maps





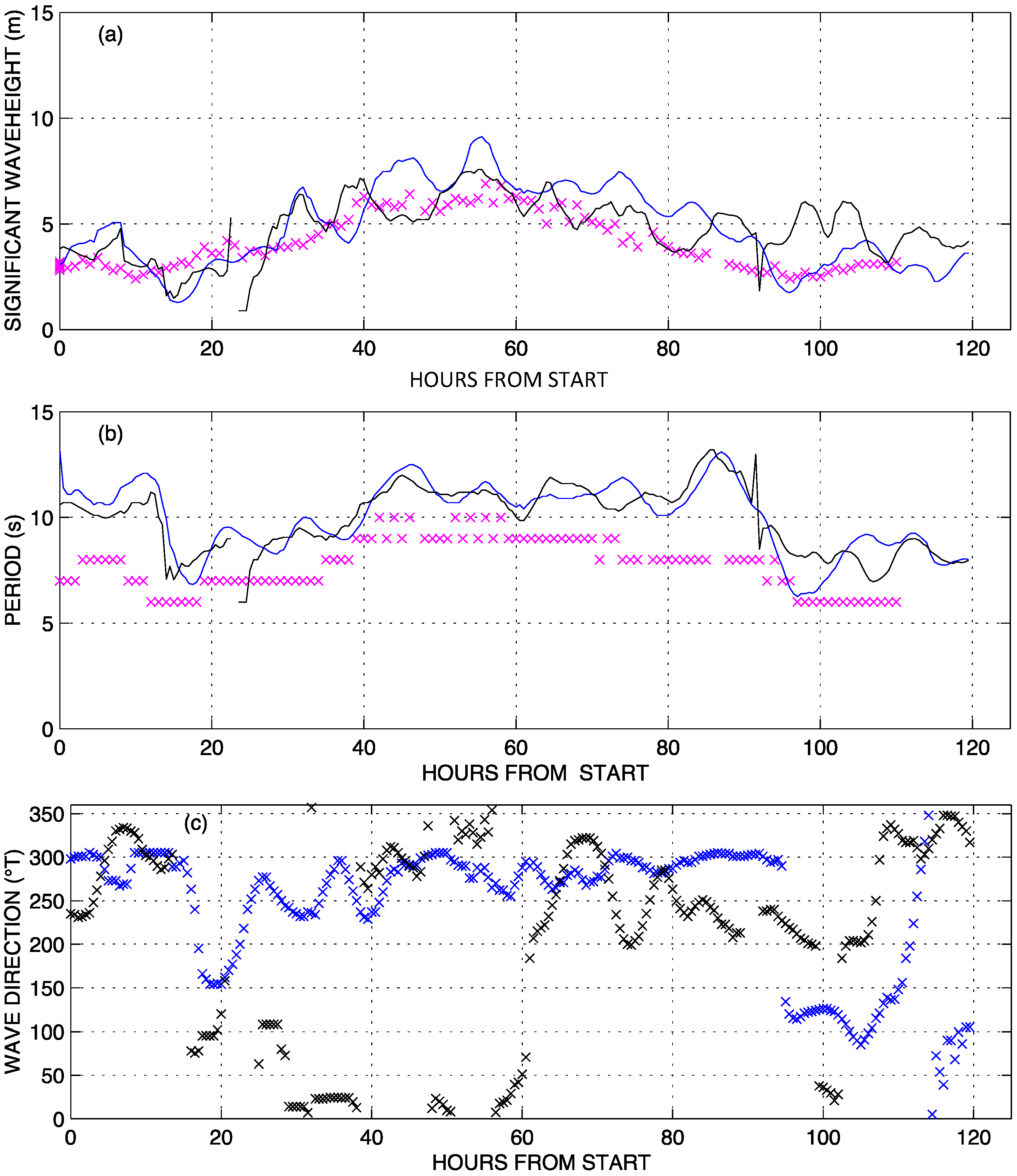
4.1.2. Wave Height, Period and Direction.

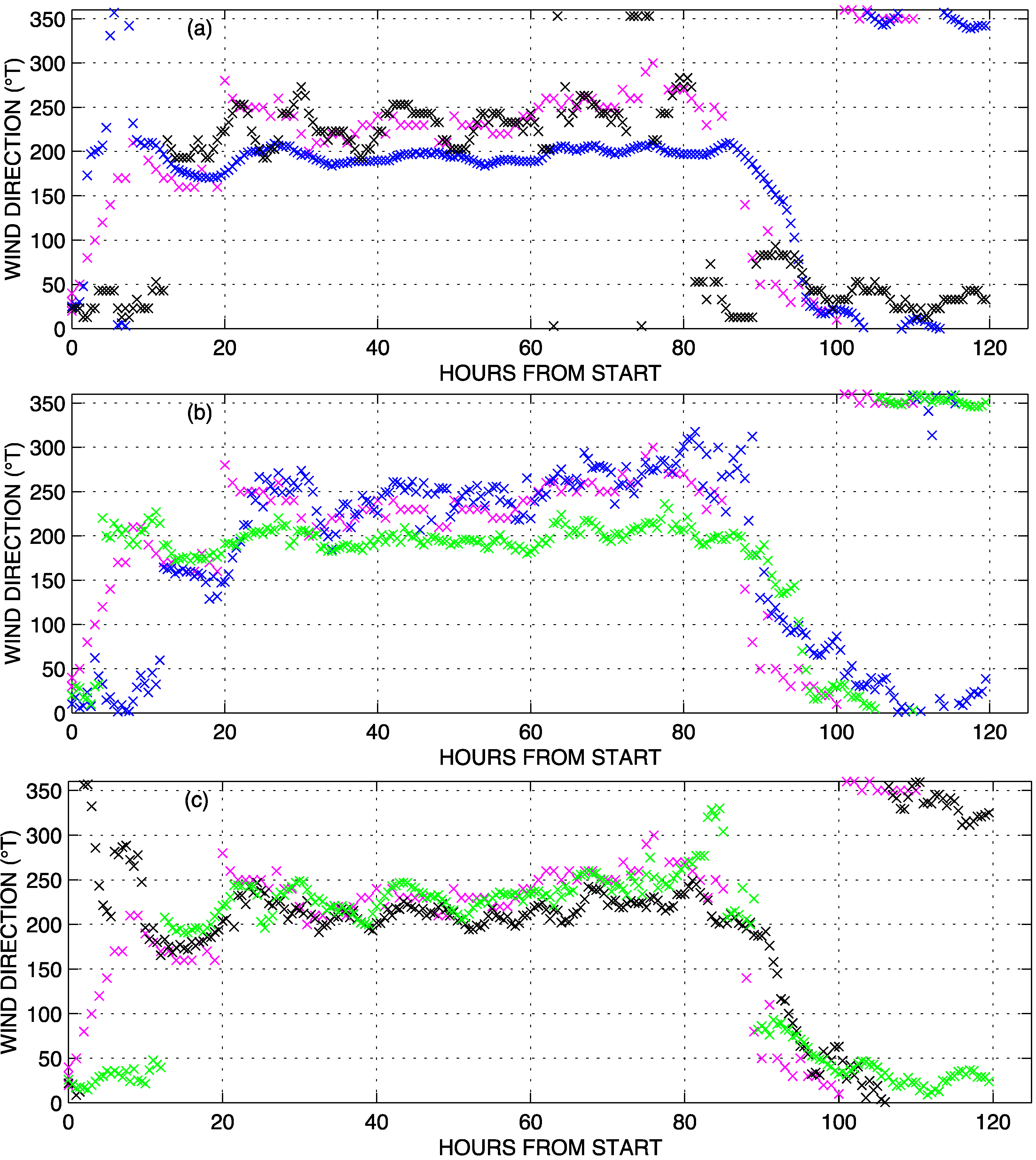
4.1.3. Wind Direction

4.2. Results for January 13, 00:00 to January 19, 23:30, 2014 UTC
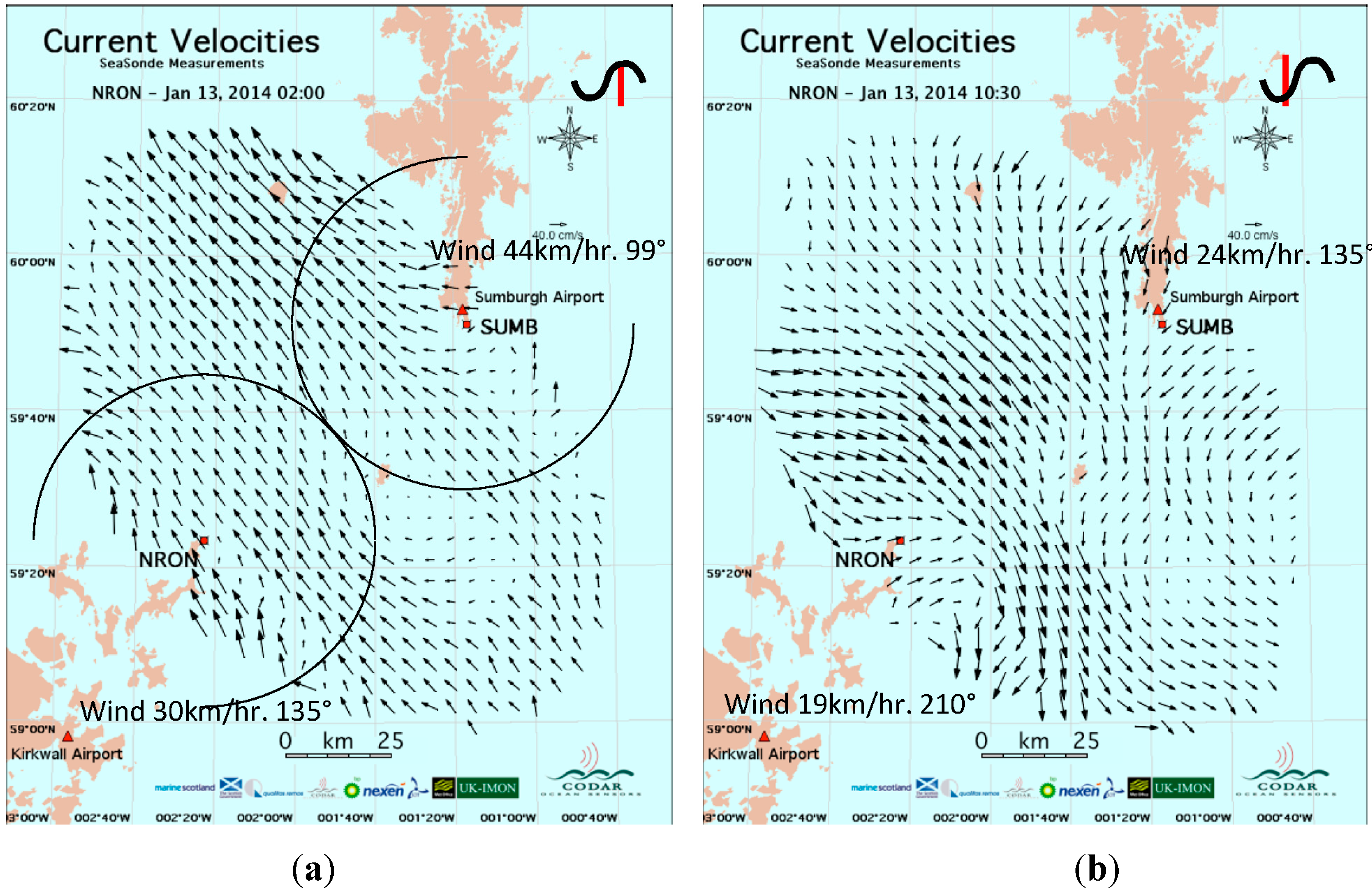
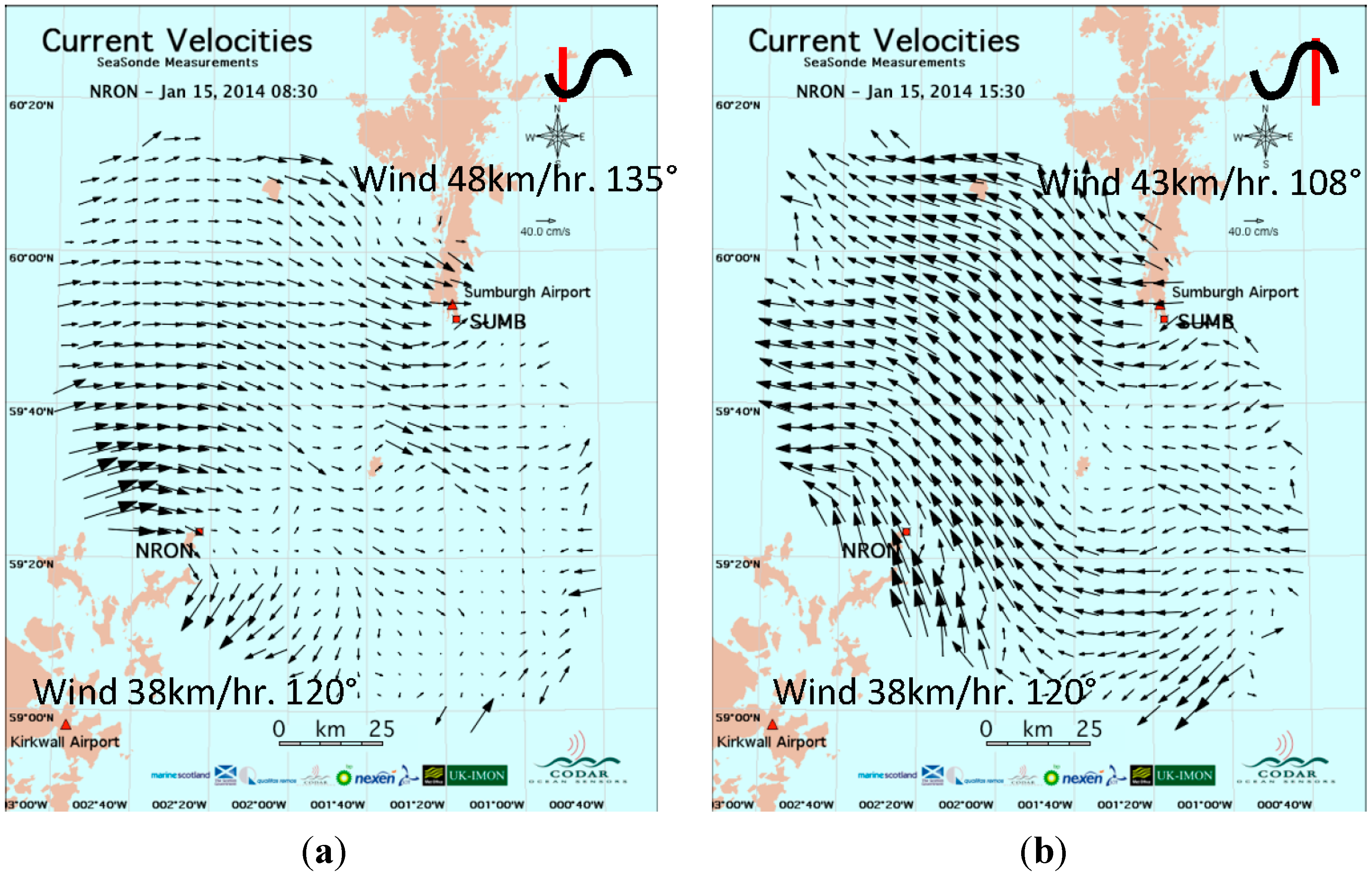
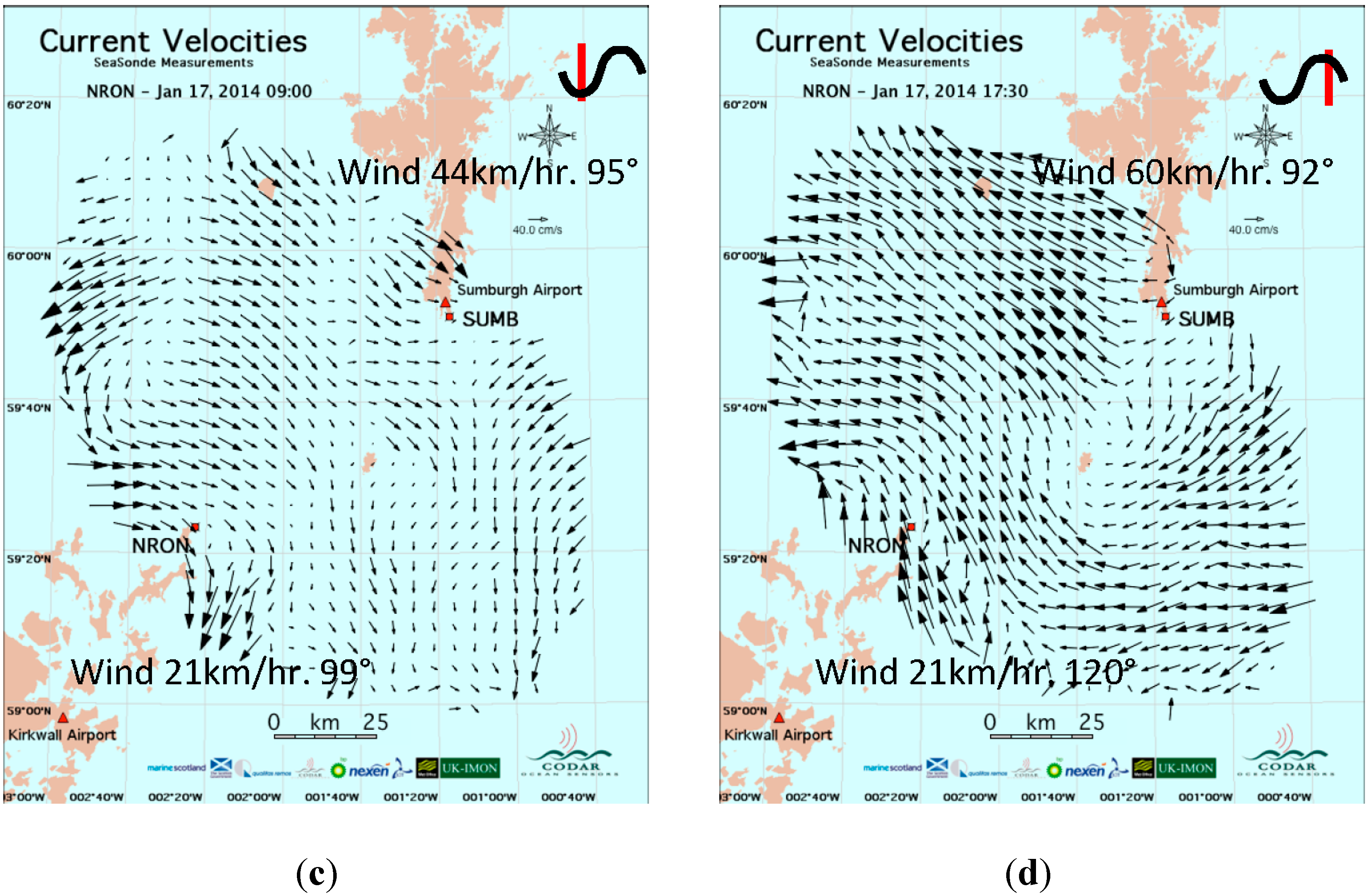
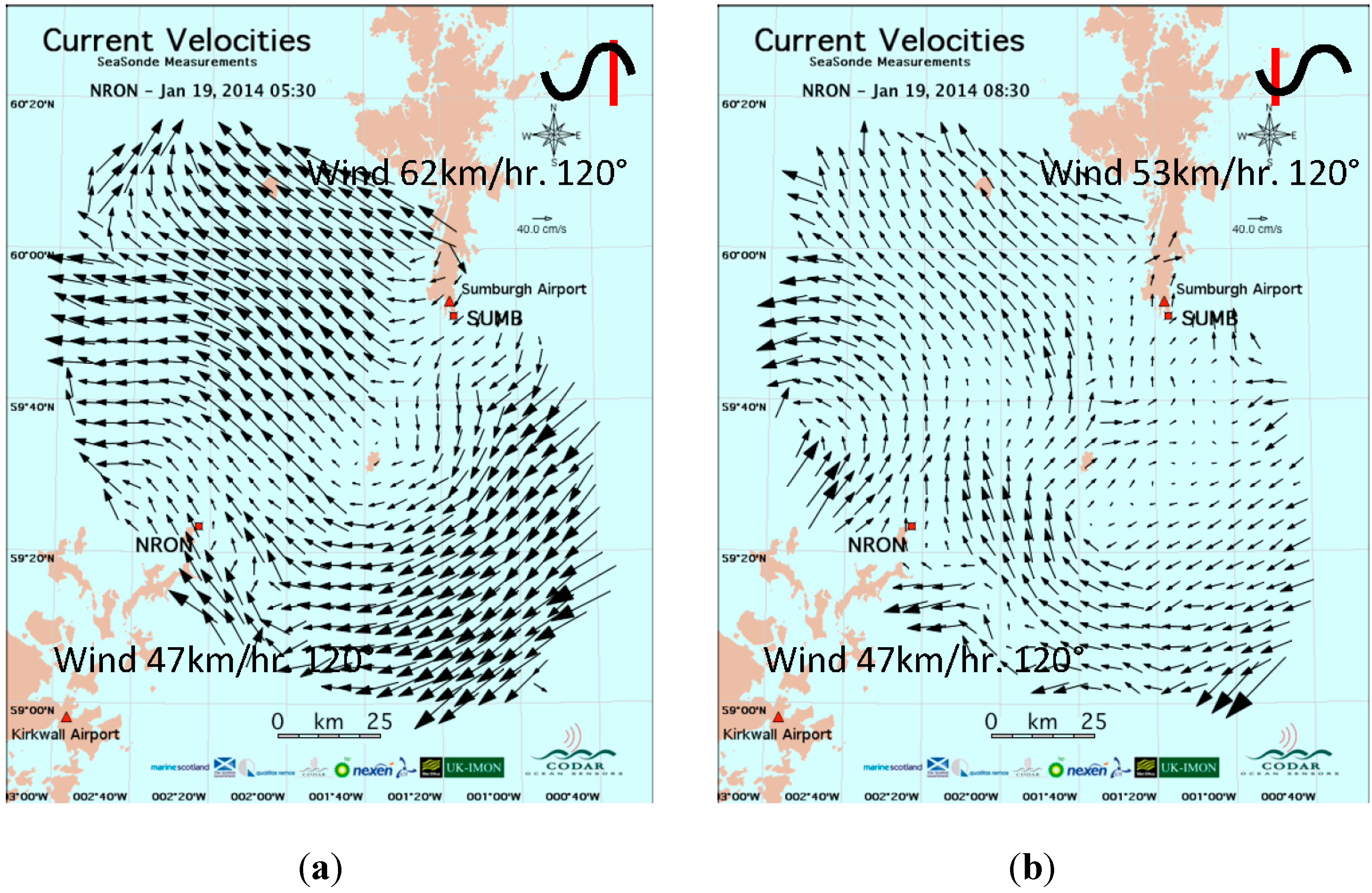
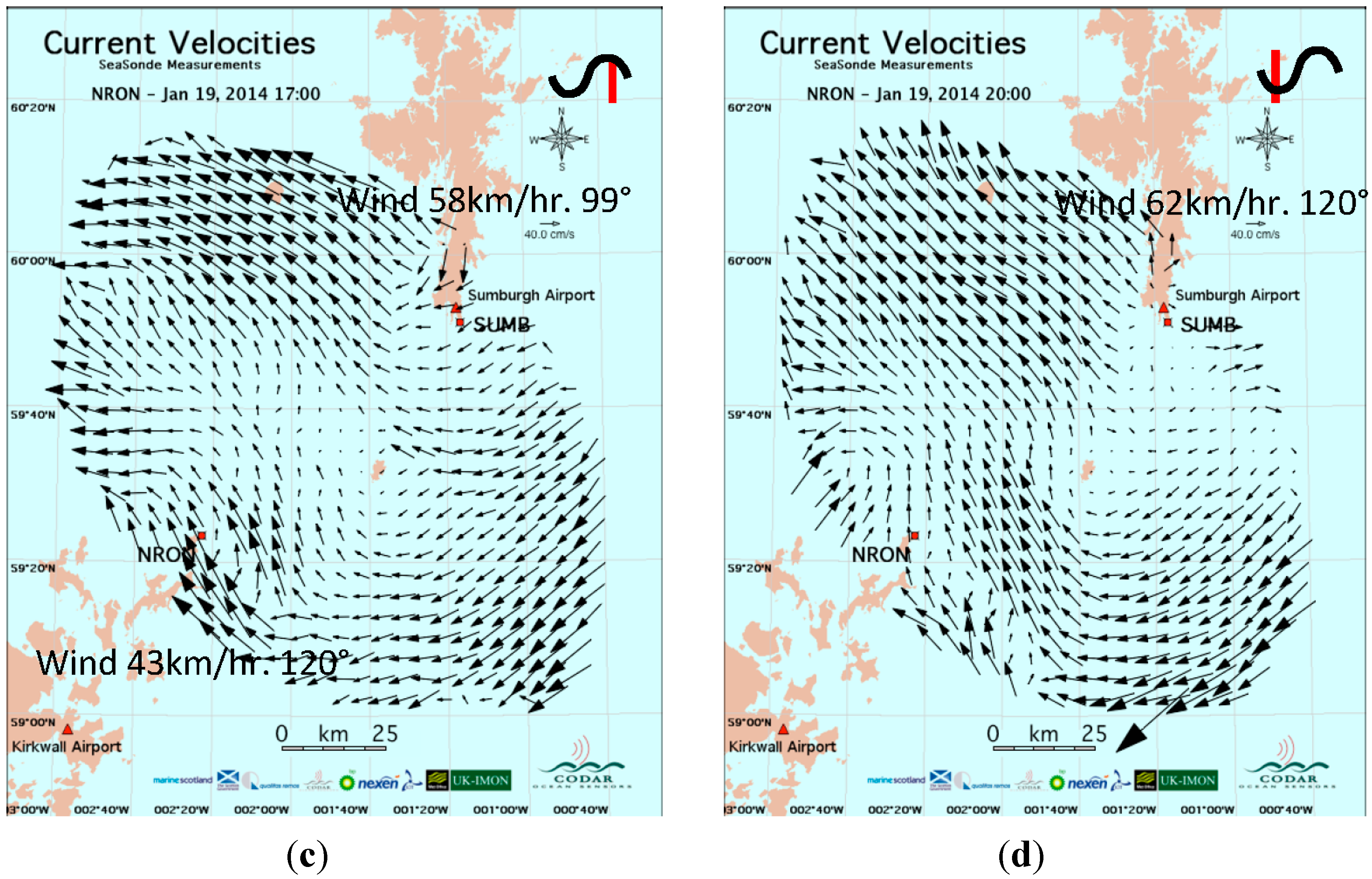
4.2.1. Current Velocity and Wind Direction Maps





4.2.2. Wave Height, Period and Direction


4.2.3. Wind Direction


4.3. Discussion
5. Interpretation of Observed Semi-Diurnal Wave Modulations
5.1. Previous Wave-Current Interaction Studies
5.2. Theory of Wave Oscillations
5.3. Comparison of Theory and Observations
5.4. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References and Notes
- Brahan SeaSonde HF Radar Project. Available online: http://www.thebrahanproject.com/ (access on 3 December 2014).
- Kohut, J; Roarty, H.; Glenn, S. Characterizing observed environmental variability with HF Doppler radar surface current mappers and acoustic Doppler current profilers: Environmental variability in the coastal ocean. IEEE J. Ocean. Eng. 2006, 31, 876–884. [Google Scholar]
- Hubbard, M.; Barrick, D.; Garfield, N.; Pettigrew, J.; Ohlmann, C.; Gough, M. A new method for estimating High-Frequency Radar error using data from Central San Francisco Bay. Ocean Sci. J. 2013, 48, 105–116. [Google Scholar] [CrossRef]
- Ohlmann, C.; White, P.; Washburn, L.; Terrill, E.; Emery, B.; Otero, M. Interpretation of coastal HF Radar-derived surface currents with high-resolution drifter data. J. Atmos. Oceanic Tech. 2006, 24, 666–6802. [Google Scholar] [CrossRef]
- Long, R.; Barrick, D.; Largier, J.; Garfield, N. Wave observations from Central California: SeaSonde systems and in situ wave buoys. J. Sens. 2011. [Google Scholar] [CrossRef]
- Alfonso, D.; Alvarez, E.; Damian Lopez, J. Comparison of CODAR SeaSonde HF Radar Operational Waves and Currents Measurements with Puertos del Estado Buoys. Final Report. 2006. Available online: http://www.codar.com/images/about/2006PDE_final_Report.pdf (access on 3 December 2014).
- Lipa, B.; Barrick, D. Least-squares methods for the extraction of surface currents from CODAR crossed-loop data: Application at ARSLOE. IEEE J. Oceanic Eng. 1983, OE-8, 226–253. [Google Scholar]
- Lipa, B.; Nyden, B.; Ullman, D.; Terrill, E. SeaSonde radial velocities: Derivation and internal consistency. IEEE J. Ocean. Eng. 2006, 31, 850–861. [Google Scholar] [CrossRef]
- Lipa, B.; Nyden, B. Directional wave information from the SeaSonde. IEEE J. Ocean. Eng. 2005, 30, 221–231. [Google Scholar] [CrossRef]
- Lipa, B.; Barrick, D. Extraction of sea state from HF radar sea echo: Mathematical theory and modeling. Radio Sci. 1986, 21, 81–100. [Google Scholar] [CrossRef]
- Fernandez, D.; Graber, H.; Paduan, J.; Barrick, D. Mapping wind direction with HF radar. Oceanography 1997, 10, 93–95. [Google Scholar] [CrossRef]
- Lipa, B.; Nyden, B.; Barrick, D.; Kohut, J. HF radar sea-echo from shallow water. Sensors 2008, 8, 4611–4635. [Google Scholar] [CrossRef]
- Weather History for Sumburgh, UK. Available online: http://www.wunderground.com/history/airport/EGPB/2013/11/3/DailyHistory.html (access on 3 December 2014).
- Weather History for Kirkwall, UK. Available online: http://www.wunderground.com/history/airport/EGPA/2013/11/3/DailyHistory.html (access on 3 December 2014).
- Station 64046—K7 Buoy. Available online: http://www.ndbc.noaa.gov/station_page.php?station=64046 (access on 3 December 2014).
- Longuet-Higgins, M.; Stewart, R. Changes in the form of short gravity waves on long waves and tidal currents. J. Fluid Mech. 1960, 8, 565–583. [Google Scholar] [CrossRef]
- Longuet-Higgins, M.; Stewart, R. Changes in the form of short gravity waves on Steady nonuniform currents. J. Fluid Mech. 1961, 10, 529–549. [Google Scholar] [CrossRef]
- Vincent, C. The interaction of wind-generated sea waves with tidal currents. J. Phys. Oceanogr. 1978, 9, 748–755. [Google Scholar] [CrossRef]
- Tolman, H. The influence of unsteady depths and currents of tides on wind-wave propagation in shelf seas. J. Phys. Oceanogr. 1990, 20, 1166–1174. [Google Scholar] [CrossRef]
- Tolman, H. Effects of tides and storm surges on North Sea wind waves. J. Phys. Oceanogr. 1991, 21, 766–781. [Google Scholar] [CrossRef]
- Phillips, O.M. The Dynamics of the Upper Ocean, 2nd ed.; Cambridge University Press: New York, NY, USA, 1997. [Google Scholar]
- Masson, D. A case study of wave–current interaction in a strong tidal current. J. Phys. Oceanogr. 1996, 26, 359–372. [Google Scholar] [CrossRef]
- Huang, N.; Chen, D.; Tang, C. Interactions between steady nonuniform currents and gravity waves with applications for current measurements. J. Phys. Oceanogr. 1972, 2, 420–431. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lipa, B.; Barrick, D.; Alonso-Martirena, A.; Fernandes, M.; Ferrer, M.I.; Nyden, B. Brahan Project High Frequency Radar Ocean Measurements: Currents, Winds, Waves and Their Interactions. Remote Sens. 2014, 6, 12094-12117. https://doi.org/10.3390/rs61212094
Lipa B, Barrick D, Alonso-Martirena A, Fernandes M, Ferrer MI, Nyden B. Brahan Project High Frequency Radar Ocean Measurements: Currents, Winds, Waves and Their Interactions. Remote Sensing. 2014; 6(12):12094-12117. https://doi.org/10.3390/rs61212094
Chicago/Turabian StyleLipa, Belinda, Donald Barrick, Andres Alonso-Martirena, Maria Fernandes, Maria Inmaculada Ferrer, and Bruce Nyden. 2014. "Brahan Project High Frequency Radar Ocean Measurements: Currents, Winds, Waves and Their Interactions" Remote Sensing 6, no. 12: 12094-12117. https://doi.org/10.3390/rs61212094