
Evaluation of the Performances of Radar and Lidar Altimetry Missions for Water Level Retrievals in Mountainous Environment: The Case of the Swiss Lakes
 ,
, 
Abstract
:
1. Introduction
2. Materials and Methods
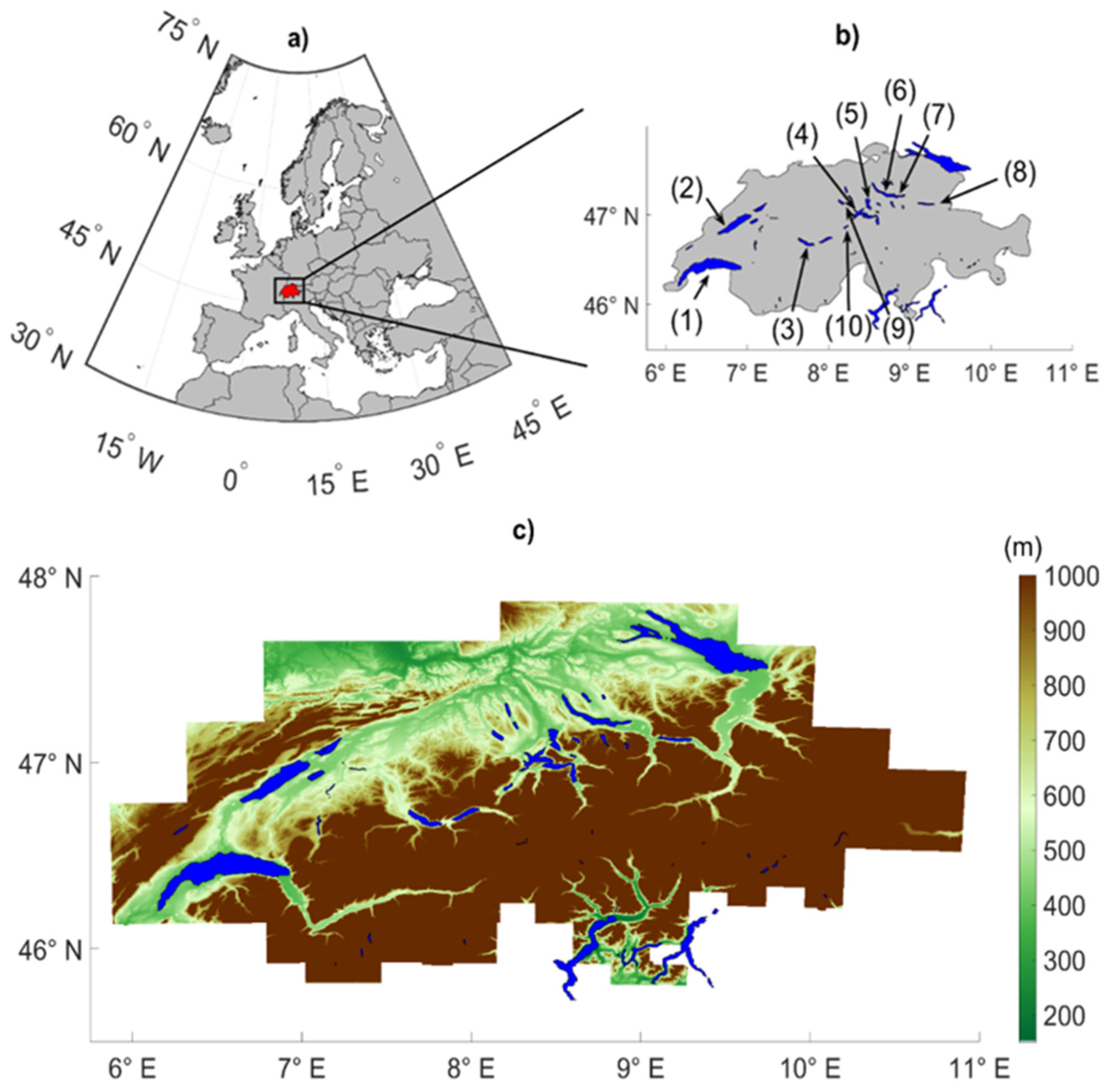
2.1. Study Area
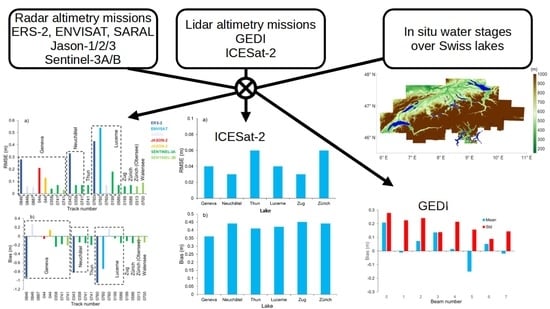
2.2. Datasets
2.2.1. Radar Altimetry Data
- Ten-day repeat orbit period missions: Jason-1, Jason-2, and Jason-3
- 2.
- Thirty-five-day repeat orbit period missions: ERS-2, ENVISAT, and SARAL
- 3.
- Twenty-seven-day repeat orbit period missions: SENTINEL-3A and SENTINEL-3B
2.2.2. Lidar Altimetry Data
- ICESat-2
- 2.
- GEDI
2.2.3. In Situ Water Levels
2.2.4. CHGeo2004 Geoid Model
2.3. Altimetry-Based Water Levels
2.3.1. Measurement Principle
2.3.2. Generating the Time-Series of Water Levels from Radar Altimetry Data Using AlTiS
- Read radar altimetry data from ERS-2, ENVISAT, JASON-1/2/3, SARAL, and SENTINEL-3A and 3B radar altimetry missions.
- Display the different variables contained in the Geophysical Data Records (GDR) of each mission including H, R0, the different corrections applied to R0, h, automatically computed from (2) when reading the data, as well as several other variables such as the backscattering coefficients and the pulse peakiness [62] at the different microwave frequencies, the brightness temperatures at the different frequencies measured by the radiometer on-board the satellite platform, and the normalized index defined by CTOH to help for the statistical analysis [63], with Landsat True color image supplied by the Global Imagery Browse Services (GIBS from NASA’s Earth observations [64]) as background.
- Manually select the valid data/remove the invalid data contouring them using the mouse.
- Generating the time series of water levels computing the median and mean values and the associated median absolute deviation and standard deviation for each cycle. Note that the different altimeter tracks are processed individually. In this study, median values and associated median absolute deviations computed each cycle are used to minimize the potential impact of residual outliers on small number of observations due to the moderate width of the lakes under the altimeter tracks (see Table 5).
2.3.3. Generating the Time-Series of Water Levels from ICESat-2 Lidar Data
2.3.4. Generating the Time-Series of Water Levels from GEDI Lidar Data
2.3.5. Levelling of the Different Water Level Datasets
2.3.6. Validation of Altimetry-Based Lake Water Levels
3. Results
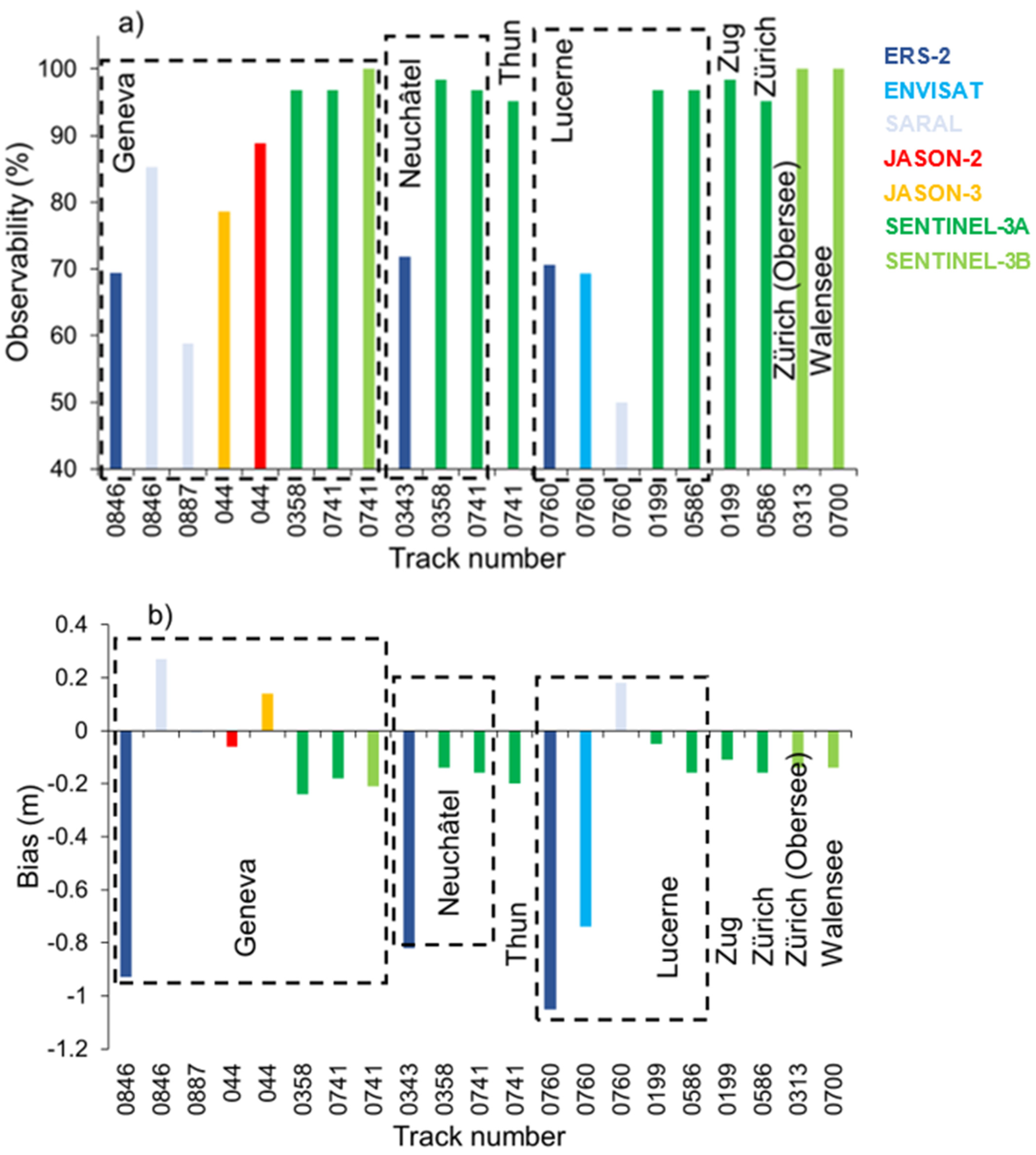
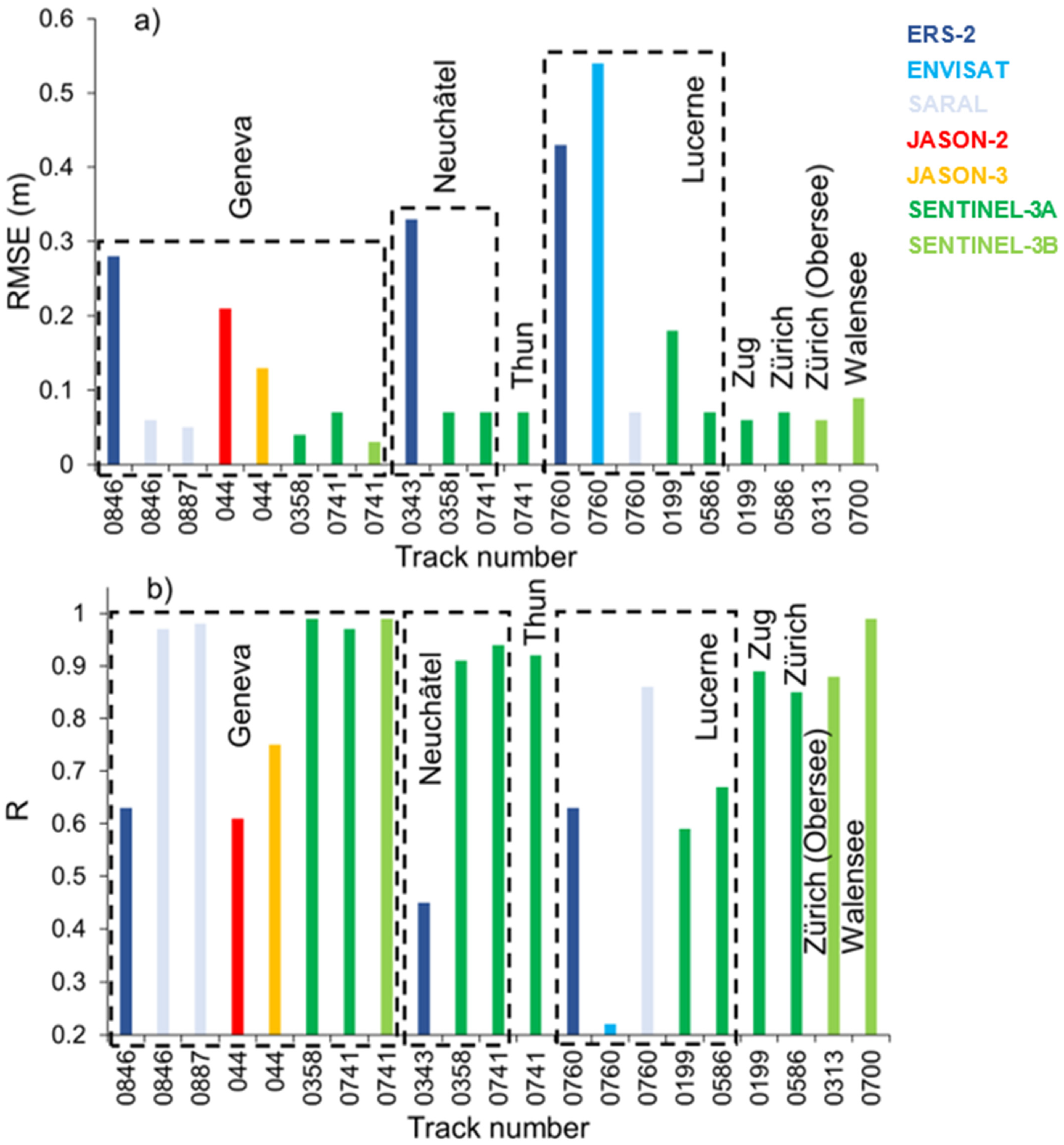
3.1. Validation of Radar Altimetry-Based Water Levels
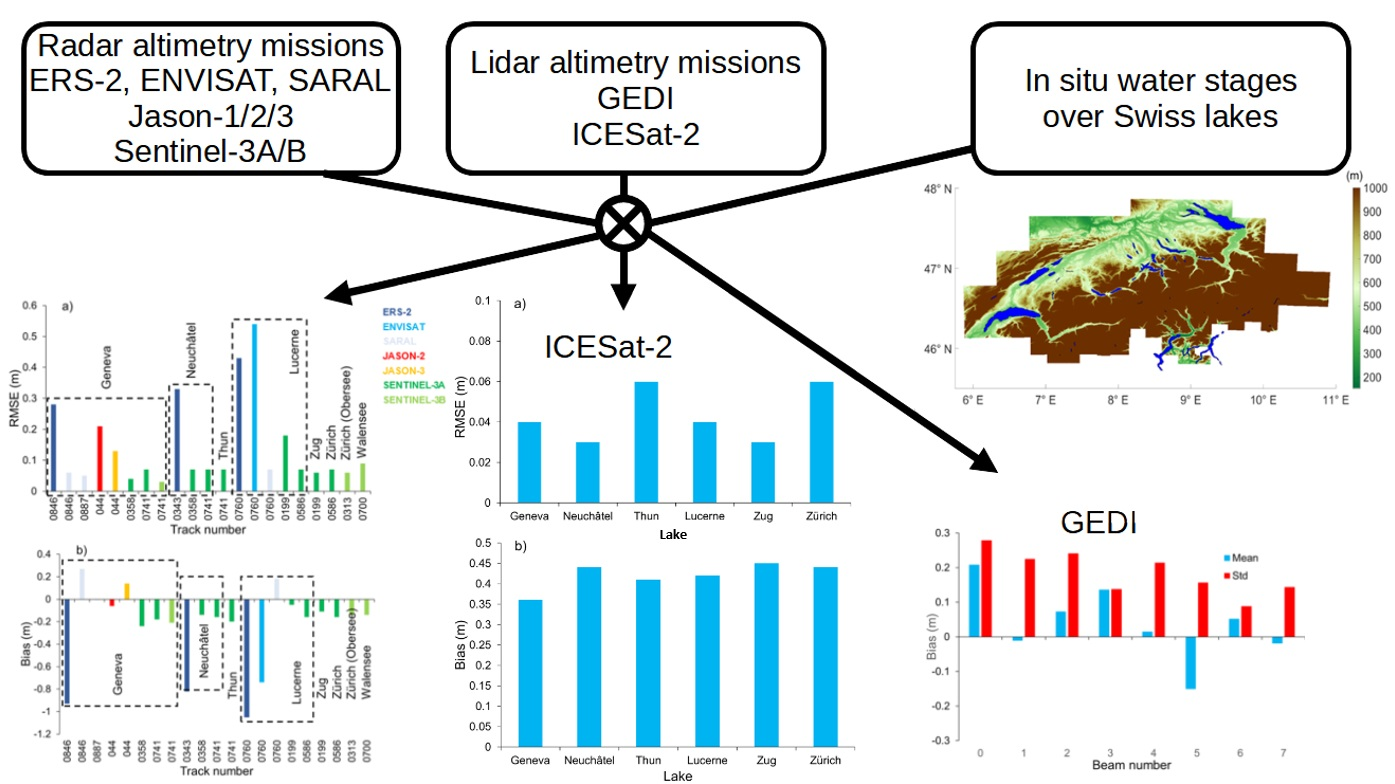
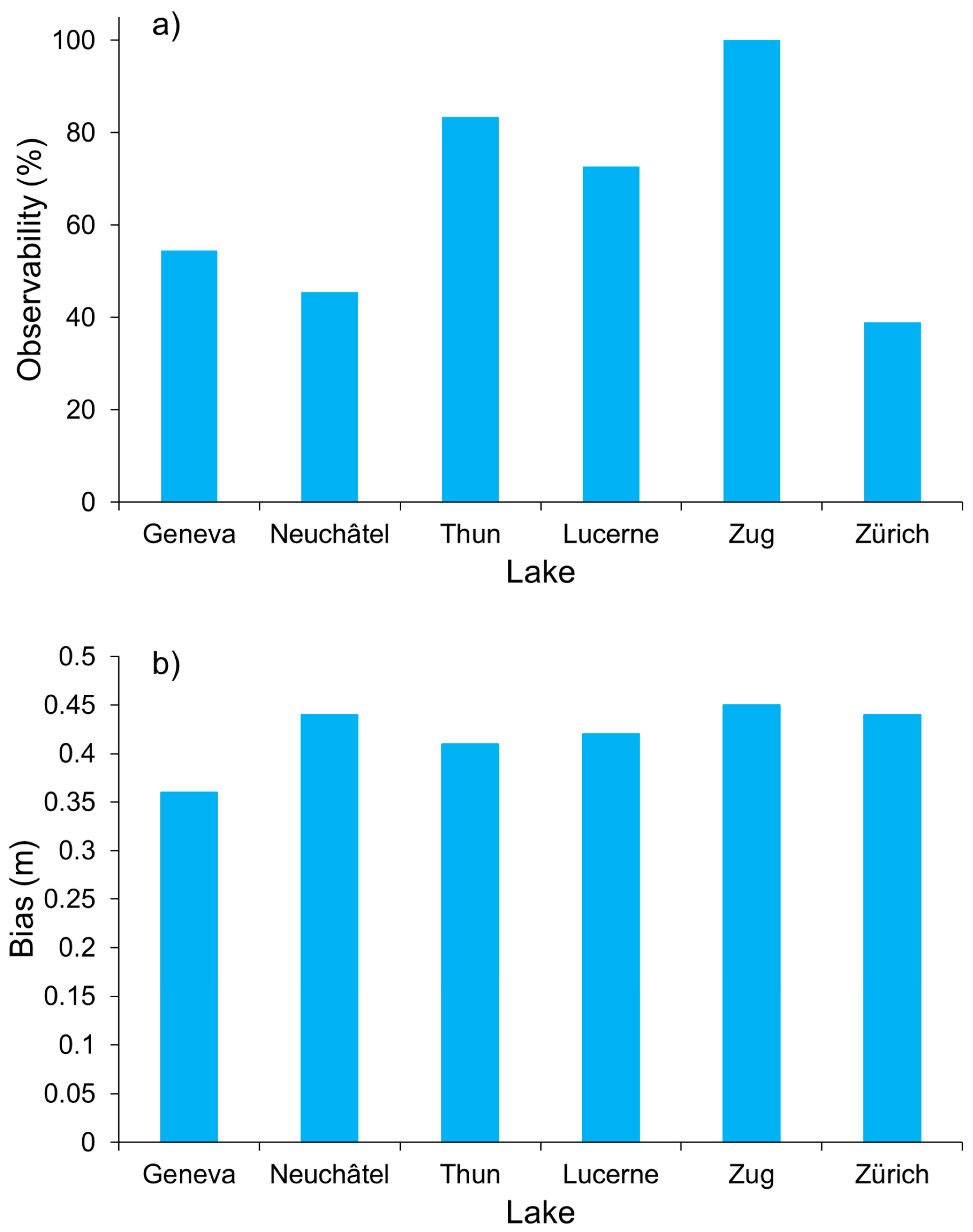
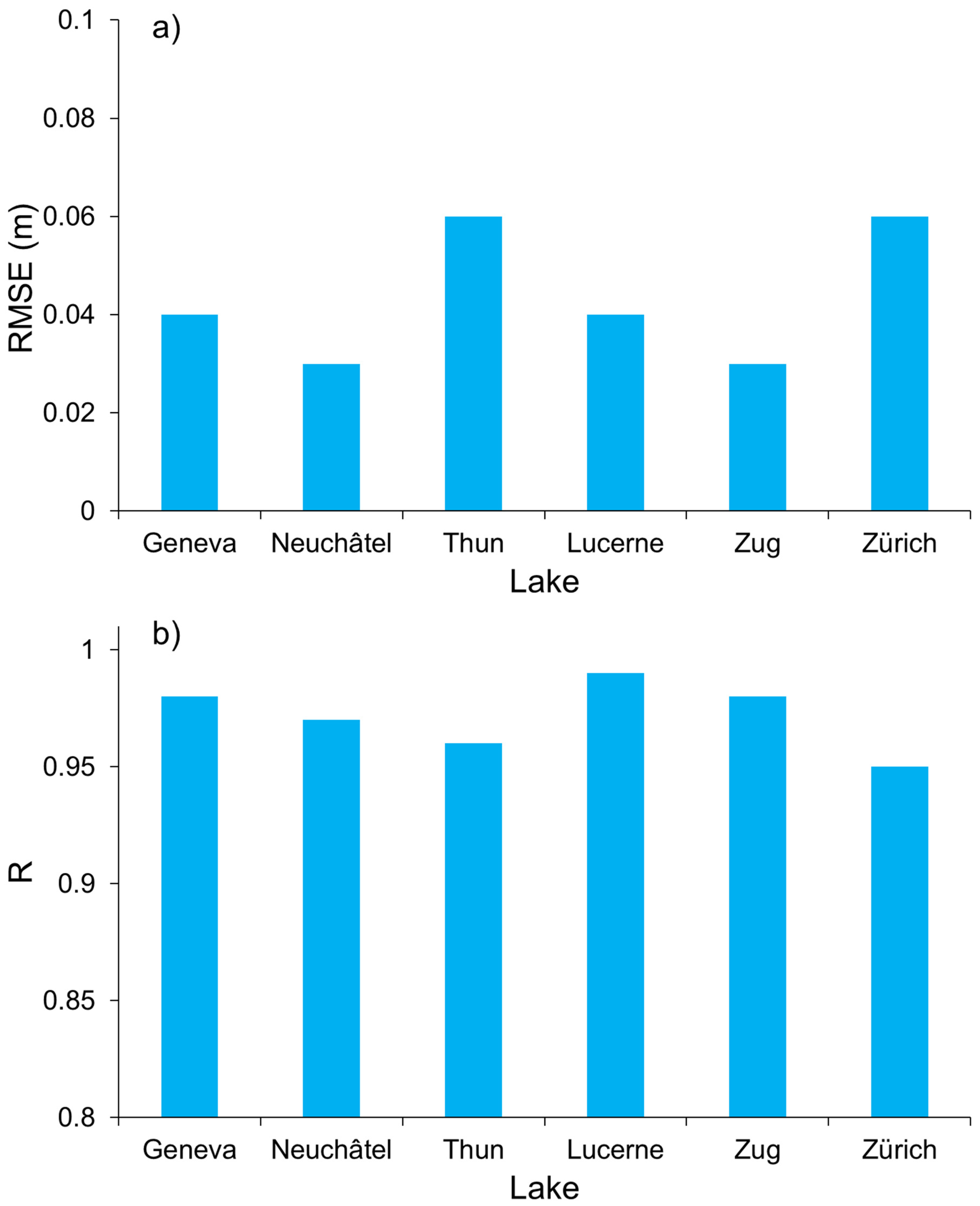
3.2. Validation of Lidar Altimetry-Based Water Levels
3.2.1. Validation of ICESat-2-Based Lake Water Levels
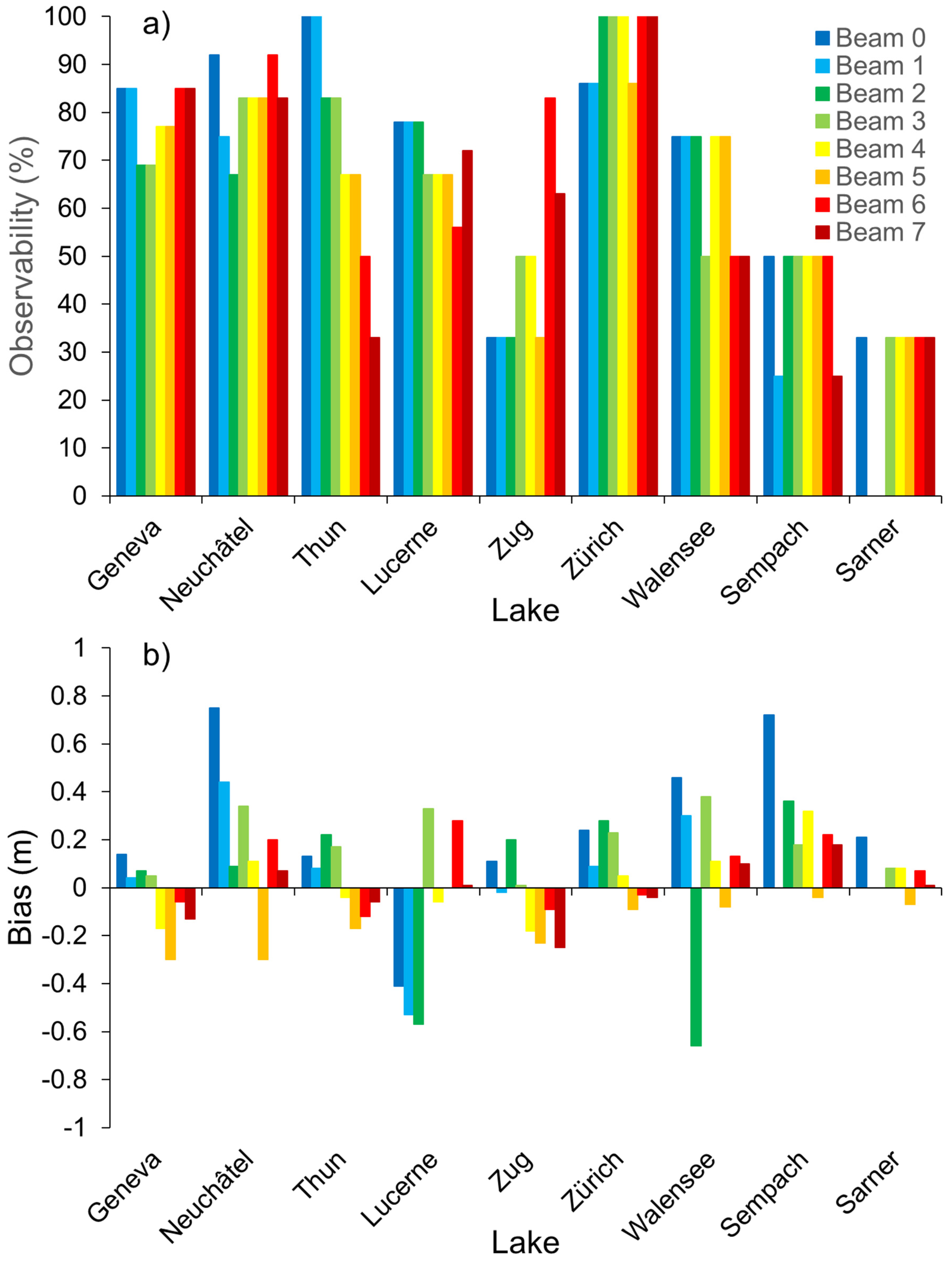
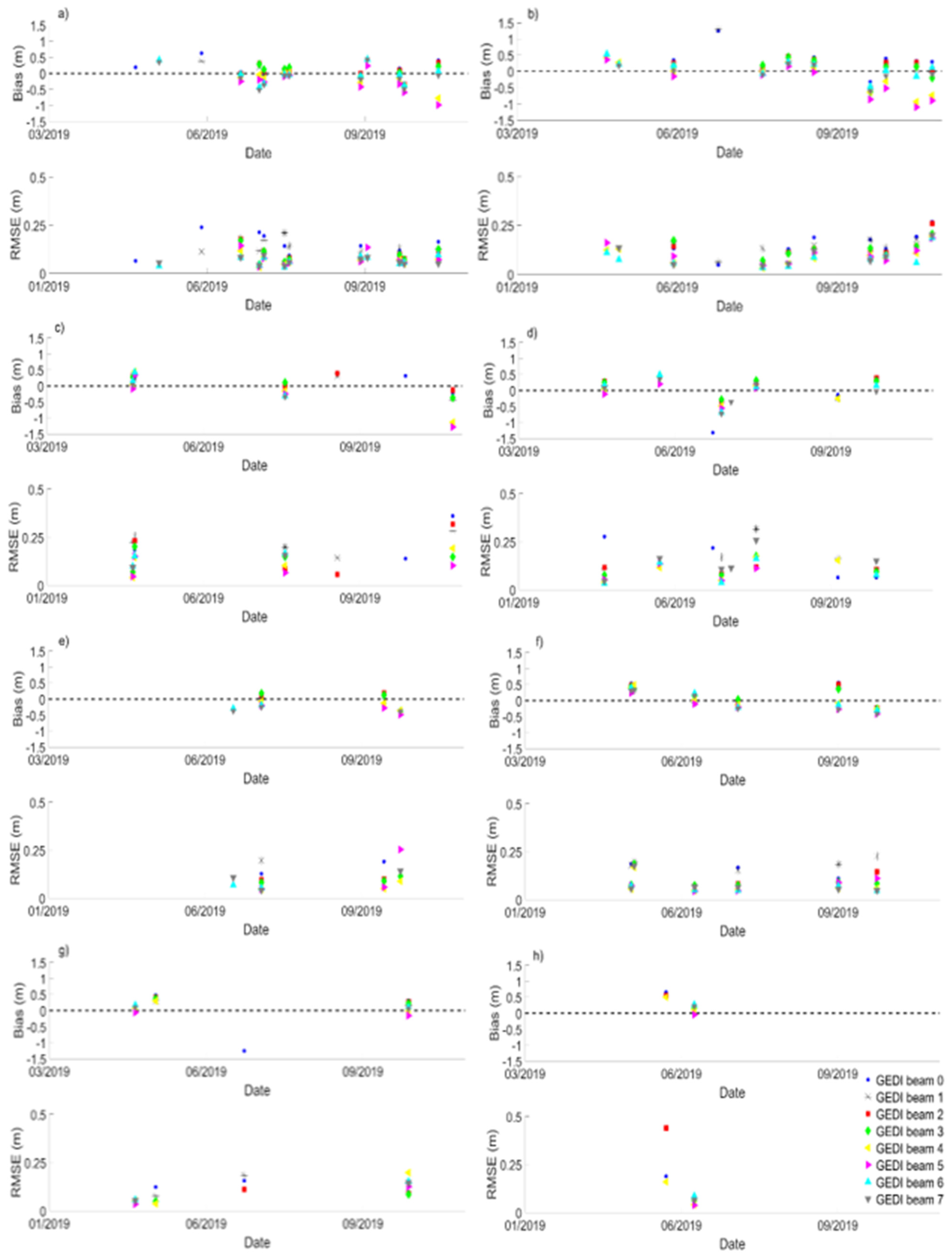
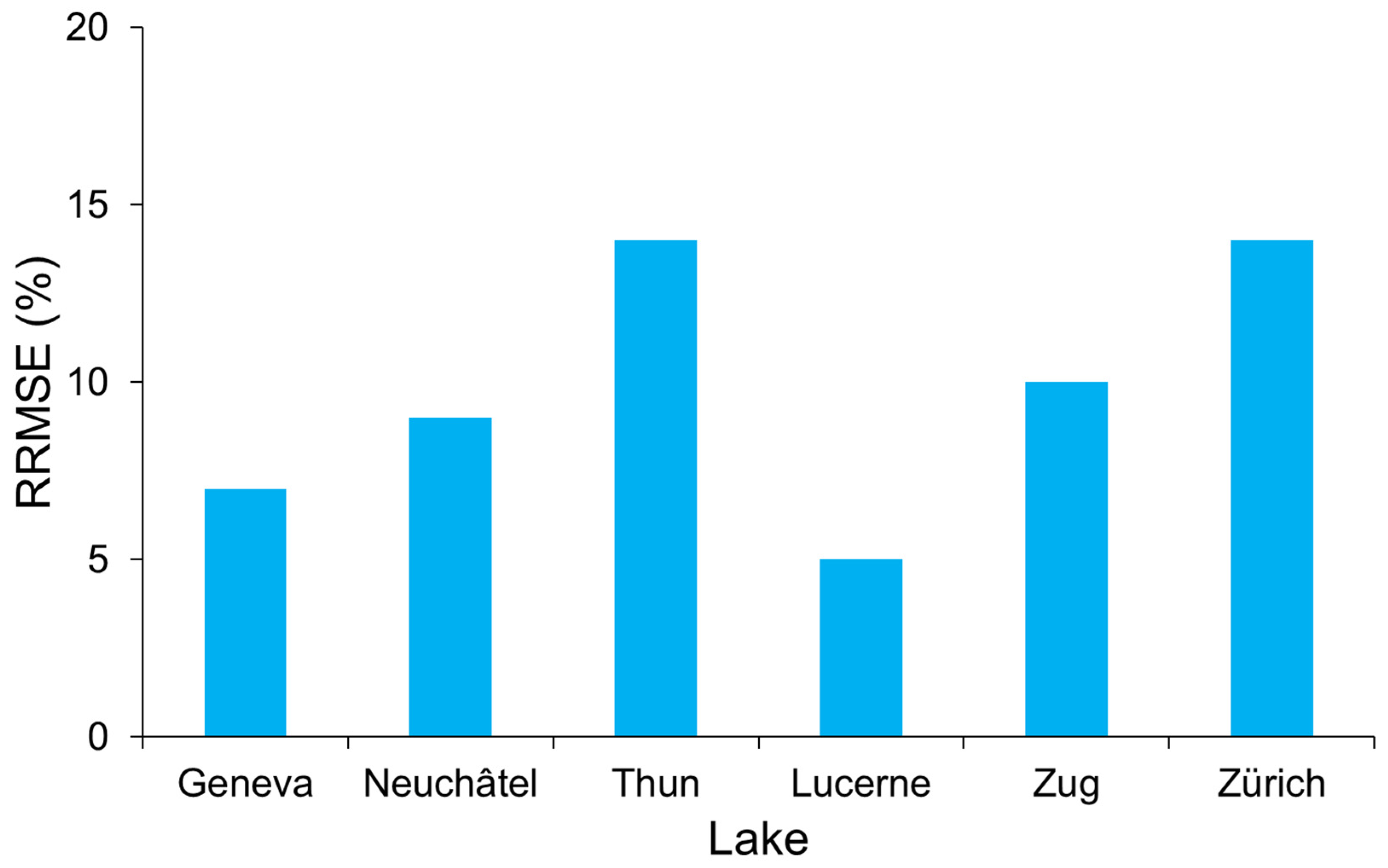
3.2.2. Validation of GEDI-Based Lake Water Levels
4. Discussion
4.1. Availability and Accuracy of Radar Altimetry-Based Water Levels in Mountainous Areas
4.2. Availability and Accuracy of Lidar Altimetry-Based Water Levels in Mountainous Areas
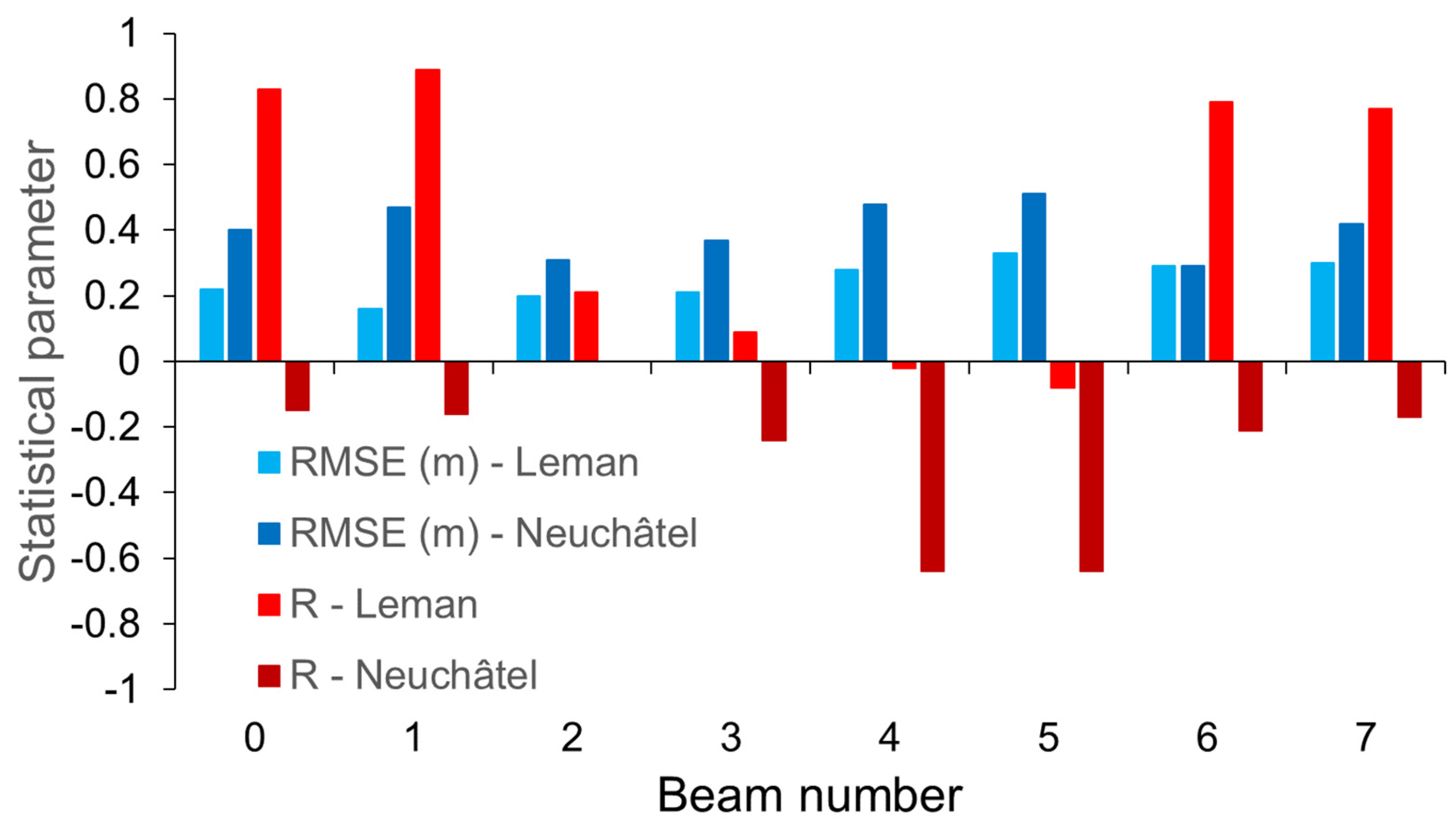
- RMSE and R were computed over a larger number of observations using RA data than using GEDI ones. In addition, as Lakes Geneva and Neuchâtel are characterized by a low seasonal amplitude (below 1 m), this could explain the lower statistical results obtained using the GEDI data, especially as GEDI sampling period is limited to 6 months.
- The footprint of the GEDI mission is much smaller (25 m of diameter) than the ones from the RA missions (a few kilometers of radius decreasing as the frequency increases from Ku to Ka bands for LRM missions, a surface of a few kilometers of length by a couple of hundreds of m of width SAR missions). GEDI waveform are more impacted by both geophysical and anthropogenic factors affecting the lake surface.
- Contrary to RA measurements, lidar observations are strongly impacted by the presence of water in the atmosphere, degrading the accuracy of the height retrievals.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


References
- Adrian, R.; O’Reilly, C.M.; Zagarese, H.; Baines, S.B.; Hessen, D.O.; Keller, W.; Livingstone, D.M.; Sommaruga, R.; Straile, D.; Van Donk, E.; et al. Lakes as sentinels of climate change. Limnol. Oceanogr. 2009, 54, 2283–2297. [Google Scholar] [CrossRef] [PubMed]
- Schindler, D.W. Lakes as sentinels and integrators for the effects of climate change on watersheds, airsheds, and landscapes. Limnol. Oceanogr. 2009, 54, 2349–2358. [Google Scholar] [CrossRef]
- Williamson, C.E.; Saros, J.E.; Vincent, W.F.; Smol, J.P. Lakes and reservoirs as sentinels, integrators, and regulators of climate change. Limnol. Oceanogr. 2009, 54, 2273–2282. [Google Scholar] [CrossRef]
- Williamson, C.E.; Brentrup, J.A.; Zhang, J.; Renwick, W.H.; Hargreaves, B.R.; Knoll, L.B.; Overholt, E.P.; Rose, K.C. Lakes as sensors in the landscape: Optical metrics as scalable sentinel responses to climate change. Limnol. Oceanogr. 2014, 59, 840–850. [Google Scholar] [CrossRef] [Green Version]
- Christensen, M.R.; Graham, M.D.; Vinebrooke, R.D.; Findlay, D.L.; Paterson, M.J.; Turner, M.A. Multiple anthropogenic stressors cause ecological surprises in boreal lakes. Glob. Chang. Biol. 2006, 12, 2316–2322. [Google Scholar] [CrossRef]
- Søndergaard, M.; Jeppesen, E. Anthropogenic impacts on lake and stream ecosystems, and approaches to restoration. J. Appl. Ecol. 2007, 44, 1089–1094. [Google Scholar] [CrossRef]
- Vörösmarty, C.; Askew, A.; Grabs, W.; Barry, R.G.; Birkett, C.; Döll, P.; Goodison, B.; Hall, A.; Jenne, R.; Kitaev, L.; et al. Global water data: A newly endangered species. Eos 2001, 82, 54. [Google Scholar] [CrossRef]
- Shiklomanov, A.I.; Lammers, R.B.; Vörösmarty, C.J. Widespread decline in hydrological monitoring threatens Pan-Arctic research. Eos 2002, 83, 13. [Google Scholar] [CrossRef]
- Birkett, C.; Reynolds, C.; Beckley, B.; Doorn, B. From research to operations: The USDA global reservoir and lake monitor. In Coastal Altimetry; Springer: Berlin/Heidelberg, Germany, 2011; pp. 19–50. ISBN 9783642127953. [Google Scholar]
- Crétaux, J.-F.; Biancamaria, S.; Arsen, A.; Bergé-Nguyen, M.; Becker, M. Global surveys of reservoirs and lakes from satellites and regional application to the Syrdarya river basin. Environ. Res. Lett. 2015, 10, 015002. [Google Scholar] [CrossRef] [Green Version]
- Bonnefond, P.; Verron, J.; Aublanc, J.; Babu, K.N.; Bergé-Nguyen, M.; Cancet, M.; Chaudhary, A.; Crétaux, J.-F.; Frappart, F.; Haines, B.; et al. The Benefits of the Ka-Band as Evidenced from the SARAL/AltiKa Altimetric Mission: Quality Assessment and Unique Characteristics of AltiKa Data. Remote Sens. 2018, 10, 83. [Google Scholar] [CrossRef] [Green Version]
- Raney, R.K. The delay/doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Biancamaria, S.; Schaedele, T.; Blumstein, D.; Frappart, F.; Boy, F.; Desjonquères, J.D.; Pottier, C.; Blarel, F.; Niño, F. Validation of Jason-3 tracking modes over French rivers. Remote Sens. Environ. 2018, 209, 77–89. [Google Scholar] [CrossRef] [Green Version]
- Taburet, N.; Zawadzki, L.; Vayre, M.; Blumstein, D.; Le Gac, S.; Boy, F.; Raynal, M.; Labroue, S.; Crétaux, J.-F.; Femenias, P. S3MPC: Improvement on Inland Water Tracking and Water Level Monitoring from the OLTC Onboard Sentinel-3 Altimeters. Remote Sens. 2020, 12, 3055. [Google Scholar] [CrossRef]
- Brown, G. The average impulse response of a rough surface and its applications. IEEE Trans. Antennas Propag. 1977, 25, 67–74. [Google Scholar] [CrossRef]
- Baup, F.; Frappart, F.; Maubant, J. Combining high-resolution satellite images and altimetry to estimate the volume of small lakes. Hydrol. Earth Syst. Sci. 2014, 18, 2007–2020. [Google Scholar] [CrossRef] [Green Version]
- Sulistioadi, Y.B.; Tseng, K.-H.; Shum, C.K.; Hidayat, H.; Sumaryono, M.; Suhardiman, A.; Setiawan, F.; Sunarso, S. Satellite radar altimetry for monitoring small rivers and lakes in Indonesia. Hydrol. Earth Syst. Sci. 2015, 19, 341–359. [Google Scholar] [CrossRef] [Green Version]
- Frappart, F.; Biancamaria, S.; Normandin, C.; Blarel, F.; Bourrel, L.; Aumont, M.; Azemar, P.; Vu, P.-L.; Le Toan, T.; Lubac, B.; et al. Influence of recent climatic events on the surface water storage of the Tonle Sap Lake. Sci. Total Environ. 2018, 636, 1520–1533. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, L.; Andersen, O.B.; Nielsen, K.; Zhang, G.; Bauer-Gottwein, P. Influence of local geoid variation on water surface elevation estimates derived from multi-mission altimetry for Lake Namco. Remote Sens. Environ. 2019, 221, 65–79. [Google Scholar] [CrossRef]
- Tortini, R.; Noujdina, N.; Yeo, S.; Ricko, M.; Birkett, C.M.; Khandelwal, A.; Kumar, V.; Marlier, M.E.; Lettenmaier, D.P. Satellite-based remote sensing data set of global surface water storage change from 1992 to 2018. Earth Syst. Sci. Data 2020, 12, 1141–1151. [Google Scholar] [CrossRef]
- Pham-Duc, B.; Sylvestre, F.; Papa, F.; Frappart, F.; Bouchez, C.; Crétaux, J.F. The Lake Chad hydrology under current climate change. Sci. Rep. 2020, 10, 5498. [Google Scholar] [CrossRef] [Green Version]
- Crétaux, J.F.; Calmant, S.; Romanovski, V.; Shabunin, A.; Lyard, F.; Bergé-Nguyen, M.; Cazenave, A.; Hernandez, F.; Perosanz, F. An absolute calibration site for radar altimeters in the continental domain: Lake Issykkul in Central Asia. J. Geod. 2009, 83, 723–735. [Google Scholar] [CrossRef]
- Crétaux, J.-F.; Calmant, S.; Romanovski, V.; Perosanz, F.; Tashbaeva, S.; Bonnefond, P.; Moreira, D.; Shum, C.K.; Nino, F.; Bergé-Nguyen, M.; et al. Absolute Calibration of Jason Radar Altimeters from GPS Kinematic Campaigns Over Lake Issykkul. Mar. Geod. 2011, 34, 291–318. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Bergé-Nguyen, M.; Calmant, S.; Jamangulova, N.; Satylkanov, R.; Lyard, F.; Perosanz, F.; Verron, J.; Montazem, A.S.; Le Guilcher, G.; et al. Absolute calibration or validation of the altimeters on the Sentinel-3A and the Jason-3 over Lake Issykkul (Kyrgyzstan). Remote Sens. 2018, 10, 1679. [Google Scholar] [CrossRef] [Green Version]
- Shu, S.; Liu, H.; Beck, R.A.; Frappart, F.; Korhonen, J.; Lan, M.; Xu, M.; Yang, B.; Huang, Y. Evaluation of historic and operational satellite radar altimetry missions for constructing consistent long-term lake water level records. Hydrol. Earth Syst. Sci. 2021, 25, 1643–1670. [Google Scholar] [CrossRef]
- Biancamaria, S. Etude du Cycle Hydrologique des Régions Boréales et Apport de L’altimétrie à Large Fauchée. Ph.D. Thesis, Toulouse 3 University, Toulouse, France, 2009. [Google Scholar]
- Kropáček, J.; Braun, A.; Kang, S.; Feng, C.; Ye, Q.; Hochschild, V. Analysis of lake level changes in Nam Co in central Tibet utilizing synergistic satellite altimetry and optical imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 17, 3–11. [Google Scholar] [CrossRef]
- O’Loughlin, F.E.; Neal, J.; Yamazaki, D.; Bates, P.D. ICESat-derived inland water surface spot heights. Water Resour. Res. 2016, 52, 3276–3284. [Google Scholar] [CrossRef] [Green Version]
- Shu, S.; Liu, H.; Frappart, F.; Kang, E.L.; Yang, B.; Xu, M.; Huang, Y.; Wu, B.; Yu, B.; Wang, S.; et al. Improving Satellite Waveform Altimetry Measurements With a Probabilistic Relaxation Algorithm. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4733–4748. [Google Scholar] [CrossRef]
- Adams, E.W.; Schlager, W.; Anselmetti, F.S. Morphology and curvature of delta slopes in Swiss lakes: Lessons for the interpretation of clinoforms in seismic data. Sedimentology 2001, 48, 661–679. [Google Scholar] [CrossRef] [Green Version]
- Taylor, P.; Perbos, J.; Escudier, P.; Parisot, F.; Zaouche, G.; Vincent, P.; Menard, Y.; Manon, F.; Kunstmann, G.; Royer, D.; et al. Jason-1: Assessment of the System Performances Special Issue: Jason-1 Calibration/Validation. Mar. Geod. 2003, 26, 37–41. [Google Scholar] [CrossRef]
- Desjonquères, J.D.; Carayon, G.; Steunou, N.; Lambin, J. Poseidon-3 Radar Altimeter: New Modes and In-Flight Performances. Mar. Geod. 2010, 33, 53–79. [Google Scholar] [CrossRef]
- Vaze, P.; Neeck, S.; Bannoura, W.; Green, J.; Wade, A.; Mignogno, M.; Zaouche, G.; Couderc, V.; Thouvenot, E.; Parisot, F. The Jason-3 Mission: Completing the transition of ocean altimetry from research to operations. In Proceedings of the Sensors, Systems, and Next-Generation Satellites XIV, Toulouse, France, 20–23 September 2010; Meynart, R., Neeck, S.P., Shimoda, H., Eds.; Volume 7826, p. 78260Y. [Google Scholar]
- DHM25. Available online: https://www.swisstopo.admin.ch/en/geodata/height/dhm25.html#dokumente (accessed on 24 March 2021).
- Francis, C.R.; Graf, G.; Edwards, P.G.; McCraig, M.; McCarthy, C.; Lefebvre, A.; Pieper, B.; Pouvreau, P.-Y.; Wall, R.; Weschler, F. The ERS-2 spacecraft and its payload. ESA Bull. 1995, 83, 13–31. [Google Scholar]
- Benveniste, J.; Roca, M.; Levrini, G.; Vincent, P.; Baker, S.; Zanife, O.; Zelli, C.; Bombaci, O. The radar altimetry mission: RA-2, MWR, DORIS and LRR. ESA Bull. 2001, 106, 25101–25108. [Google Scholar]
- Verron, J.; Sengenes, P.; Lambin, J.; Noubel, J.; Steunou, N.; Guillot, A.; Picot, N.; Coutin-Faye, S.; Sharma, R.; Gairola, R.M.; et al. The SARAL/AltiKa Altimetry Satellite Mission. Mar. Geod. 2015, 38, 2–21. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- CTOH. Available online: http://ctoh.legos.obs-mip.fr/ (accessed on 24 October 2017).
- Frappart, F.; Legrésy, B.; Niño, F.; Blarel, F.; Fuller, N.; Fleury, S.; Birol, F.; Calmant, S. An ERS-2 altimetry reprocessing compatible with ENVISAT for long-term land and ice sheets studies. Remote Sens. Environ. 2016, 184. [Google Scholar] [CrossRef]
- Mannucci, A.J.; Wilson, B.D.; Yuan, D.N.; Ho, C.H.; Lindqwister, U.J.; Runge, T.F. A global mapping technique for GPS-derived ionospheric total electron content measurements. Radio Sci. 1998, 33, 565–582. [Google Scholar] [CrossRef]
- Cartwright, D.E.; Edden, A.C. Corrected Tables of Tidal Harmonics. Geophys. J. R. Astron. Soc. 1973, 33, 253–264. [Google Scholar] [CrossRef] [Green Version]
- Wahr, J.M. Deformation induced by polar motion. J. Geophys. Res. 1985, 90, 9363. [Google Scholar] [CrossRef]
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The Ice, Cloud, and land Elevation Satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Pitts, K. The ATL08 land and vegetation product for the ICESat-2 Mission. Remote Sens. Environ. 2019, 221, 247–259. [Google Scholar] [CrossRef]
- Jasinski, M.F.; Stoll, J.D.; Hancock, D.; Robbins, J.; Nattala, J.; Morison, J.; Jones, B.M.; Ondrusek, M.E.; Pavelsky, T.M.; Parrish, C.; et al. ATLAS/ICESat-2 L3A Inland Water Surface Height, Version 3; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2020. [Google Scholar]
- ATLAS/ICESat-2 L3A Inland Water Surface Height, Version 3; National Snow and Ice Data Center. Available online: https://nsidc.org/data/atl13/versions/3 (accessed on 11 April 2021).
- Dubayah, R.; Blair, J.B.; Goetz, S.; Fatoyinbo, L.; Hansen, M.; Healey, S.; Hofton, M.; Hurtt, G.; Kellner, J.; Luthcke, S.; et al. The Global Ecosystem Dynamics Investigation: High-resolution laser ranging of the Earth’s forests and topography. Sci. Remote Sens. 2020, 1, 100002. [Google Scholar] [CrossRef]
- Dubayah, R.; Hofton, M.; Blair, J.B.; Armston, J.; Tang, H.; Luthcke, S. GEDI L2A Elevation and Height Metrics Data Global Footprint Level V001 [Dataset]; NASA EOSDIS L. Processes DAAC; DAAC: Oak Ridge, TN, USA, 2019. [Google Scholar]
- Hydrologische Daten und Vorhersagen. Available online: https://www.hydrodaten.admin.ch/ (accessed on 7 December 2020).
- Liechti, P. L’état des lacs en Suisse; OFEFP: Bern, Switzerland, 1995. [Google Scholar]
- NAVREF. Available online: https://www.swisstopo.admin.ch/en/maps-data-online/calculation-services/navref.html (accessed on 10 March 2021).
- Marti, U. Comparison of high precision geoid models in Switzerland. In Proceedings of the International Association of Geodesy Symposia; Springer: Berlin/Heidelberg, Germany, 2007; Volume 130, pp. 377–382. [Google Scholar]
- CHGeo2004 Geoid. Available online: https://www.swisstopo.admin.ch/en/knowledge-facts/surveying-geodesy/geoid.html (accessed on 16 December 2020).
- Chelton, D.B.; Ries, J.C.; Haines, B.J.; Fu, L.-L.; Callahan, P.S. Chapter 1 Satellite Altimetry. In Satellite Altimetry and Earth Sciences A Handbook of Techniques and Applications; Elsevier: Amsterdam, The Netherlands, 2001; Volume 69, pp. 1–131. ISBN 0074-6142. [Google Scholar]
- Frappart, F.; Blumstein, D.; Cazenave, A.; Ramillien, G.; Birol, F.; Morrow, R.; Rémy, F. Satellite Altimetry: Principles and Applications in Earth Sciences. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2017; pp. 1–25. ISBN 047134608X. [Google Scholar]
- Crétaux, J.-F.; Nielsen, K.; Frappart, F.; Papa, F.; Calmant, S.; Benveniste, J. Hydrological applications of satellite altimetry: Rivers, lakes, man-made reservoirs, inundated areas. In Satellite Altimetry Over Oceans and Land Surfaces; Stammer, D., Cazenave, A., Eds.; Earth Observation of Global Changes; CRC Press: Boca Raton, FL, USA, 2017; pp. 459–504. [Google Scholar]
- Wingham, D.J.; Rapley, C.G.; Griffiths, H. New Techniques in Satellite Altimeter Tracking Systems. Proc. IGARSS Symp. Zurich 1986, 86, 1339–1344. [Google Scholar]
- Frappart, F.; Calmant, S.; Cauhopé, M.; Seyler, F.; Cazenave, A. Preliminary results of ENVISAT RA-2-derived water levels validation over the Amazon basin. Remote Sens. Environ. 2006, 100, 252–264. [Google Scholar] [CrossRef] [Green Version]
- Frappart, F.; Papa, F.; Marieu, V.; Malbeteau, Y.; Jordy, F.; Calmant, S.; Durand, F.; Bala, S. Preliminary Assessment of SARAL/AltiKa Observations over the Ganges-Brahmaputra and Irrawaddy Rivers. Mar. Geod. 2015, 38, 568–580. [Google Scholar] [CrossRef]
- Normandin, C.; Frappart, F.; Diepkilé, A.T.; Marieu, V.; Mougin, E.; Blarel, F.; Lubac, B.; Braquet, N.; Ba, A. Evolution of the performances of radar altimetry missions from ERS-2 to Sentinel-3A over the Inner Niger Delta. Remote Sens. 2018, 10, 833. [Google Scholar] [CrossRef] [Green Version]
- Laxon, S.W.; Rapley, C.G. Radar altimeter data quality flagging. Adv. Sp. Res. 1987, 7, 315–318. [Google Scholar] [CrossRef]
- Frappart, F.; Blarel, F.; Papa, F.; Prigent, C.; Mougin, E.; Paillou, P.; Baup, F.; Zeiger, P.; Salameh, E.; Darrozes, J.; et al. Backscattering signatures at ka, ku, c and s bands from low resolution radar altimetry over land. Adv. Sp. Res. 2020. [Google Scholar] [CrossRef]
- NASA Global Imagery Browse Services (GIBS)—Earthdata. Available online: https://earthdata.nasa.gov/eosdis/science-system-description/eosdis-components/gibs (accessed on 27 April 2021).
- AlTiS—Altimetric Time Series Software—CTOH. Available online: http://ctoh.legos.obs-mip.fr/applications/land_surfaces/softwares/altis (accessed on 27 April 2021).
- AlTiS Data Request—CTOH. Available online: http://ctoh.legos.obs-mip.fr/applications/land_surfaces/altimetric_data/altis (accessed on 27 April 2021).
- Data Products—ICESat-2. Available online: https://icesat-2.gsfc.nasa.gov/science/data-products (accessed on 29 April 2021).
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117, 1–38. [Google Scholar] [CrossRef] [Green Version]
- Bergé-Nguyen, M.; Cretaux, J.F.; Calmant, S.; Fleury, S.; Satylkanov, R.; Chontoev, D.; Bonnefond, P. Mapping mean lake surface from satellite altimetry and GPS kinematic surveys. Adv. Sp. Res. 2021, 67, 985–1001. [Google Scholar] [CrossRef]
- Fayad, I.; Baghdadi, N.; Bailly, J.S.; Frappart, F.; Zribi, M. Analysis of GEDI elevation data accuracy for inland waterbodies altimetry. Remote Sens. 2020, 12, 2714. [Google Scholar] [CrossRef]
- Baghdadi, N.; Le Maire, G.; Bailly, J.S.; Osé, K.; Nouvellon, Y.; Zribi, M.; Lemos, C.; Hakamada, R. Evaluation of ALOS/PALSAR L-Band Data for the Estimation of Eucalyptus Plantations Aboveground Biomass in Brazil. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3802–3811. [Google Scholar] [CrossRef] [Green Version]
- Marti, U. Modelling of Differences of Height Systems in Switzerland. In Proceedings of the Gravity and Geoid 2002, Thessaloniki, Greece, 26–30 August 2002. [Google Scholar]
- Swisstopo—Page D’accueil. Available online: https://www.swisstopo.admin.ch/ (accessed on 29 April 2021).
- Biancamaria, S.; Frappart, F.; Leleu, A.-S.S.; Marieu, V.; Blumstein, D.; Desjonquères, J.-D.; Boy, F.; Sottolichio, A.; Valle-Levinson, A. Satellite radar altimetry water elevations performance over a 200 m wide river: Evaluation over the Garonne River. Adv. Sp. Res. 2017, 59, 128–146. [Google Scholar] [CrossRef] [Green Version]
- Kouraev, A.V.; Shimaraev, M.N.; Buharizin, P.I.; Naumenko, M.A.; Crétaux, J.F.; Mognard, N.; Legrésy, B.; Rémy, F. Ice and snow cover of continental water bodies from simultaneous radar altimetry and radiometry observations. Surv. Geophys. 2008, 29, 271–295. [Google Scholar] [CrossRef]
- Shu, S.; Liu, H.; Beck, R.A.; Frappart, F.; Korhonen, J.; Xu, M.; Yang, B.; Hinkel, K.M.; Huang, Y.; Yu, B. Analysis of Sentinel-3 SAR altimetry waveform retracking algorithms for deriving temporally consistent water levels over ice-covered lakes. Remote Sens. Environ. 2020, 239, 111643. [Google Scholar] [CrossRef]
- Ziyad, J.; Goïta, K.; Magagi, R.; Blarel, F.; Frappart, F. Improving the estimation of water level over freshwater ice cover using altimetry satellite active and passive observations. Remote Sens. 2020, 12, 967. [Google Scholar] [CrossRef] [Green Version]
- Bogning, S.; Frappart, F.; Blarel, F.; Niño, F.; Mahé, G.; Bricquet, J.P.; Seyler, F.; Onguéné, R.; Etamé, J.; Paiz, M.C.; et al. Monitoring water levels and discharges using radar altimetry in an ungauged river basin: The case of the Ogooué. Remote Sens. 2018, 10, 350. [Google Scholar] [CrossRef] [Green Version]
- Hansen, C.M.; Healey, S.; Hofton, M.; Hurtt, G.; Fatoyinbo, L.; Kellner, J.; Luthcke, S.; Armston, J.; Burns, P.; Duncanson, L.; et al. Global Ecosystem Dynamics Investigation (GEDI) Level 1B User Guide For SDPS PGEVersion 3 (P003) of GEDI L1B Data Science Team. Sci. Remote Sens. 2020, 3, 1–13. [Google Scholar]
- Oesch, D.; Jaquet, J.M.; Klaus, R.; Schenker, P. Multi-scale thermal pattern monitoring of a large lake (Lake Geneva) using a multi-sensor approach. Int. J. Remote Sens. 2008, 29, 5785–5808. [Google Scholar] [CrossRef] [Green Version]
- Lemmin, U.; D’Adamo, N. Summertime winds and direct cyclonic circulation: Observations from Lake Geneva. Ann. Geophys. 1997, 14, 1207–1220. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Altimetry Mission | Jason-1 | Jason-2 | Jason-3 | ERS-2 | ENVISAT | SARAL | SENTINEL-3 |
|---|---|---|---|---|---|---|---|
| Start | 01/2002 | 07/2008 | 02/2019 | 05/1995 | 05/2002 | 03/2013 | 02/2016 (A) 04/2018 (B) |
| End | 01/2009 | 10/2016 | On-going | 11/2003 | 10/2010 | 07/2016 | On-going (A and B) |
| GDR | E | D | D | CTOH [40] | v2.1 | T | |
| Along-track sampling | 20 Hz | 20 Hz | 20 Hz | 20 Hz | 18 Hz | 40 Hz | 20 Hz |
| Retracker | ICE | ICE | ICE | ICE-1 | ICE-1 | ICE-1 | OCOG |
| ΔRiono | global ionospheric map (GIM) [41]-based 1 | ||||||
| ΔRdry | European Centre for Medium-Range Weather Forecasts (ECMWF)-based using Digital Elevation Model (DEM) | ECMWF-based using h | ECMWF-based using DEM | ||||
| ΔRwet | ECMWF-based using DEM | ||||||
| ΔRsolid Earth | Based on Cartwright et al. [42] | ||||||
| ΔRpole | Based on Wahr et al. [43] | ||||||
| Lake | Dates |
|---|---|
| Geneva | 3 December 2018; 29 December 2018; 27 January 2019; 2 February 2019; 25 February 2020; 30 March 2019; 28 April 2019; 3 August 2019; 25 August 2019; 27 September 2019; 24 November 2019; 23 December 2019 |
| Neuchâtel | 3 March 2019; 26 March 2019; 2 June 2019; 25 June 2019; 23 December 2019 |
| Thun | 29 November 2018; 27 February 2019; 22 March 2019; 26 September 2019; 18 October 2019 |
| Lucerne | 17 December 2018; 23 February 2019; 18 March 2019; 25 May 2019; 17 June 2019; 24 August 2019; 15 September 2019; 25 October 2019 |
| Zug | 25 May 2019; 15 March 2020; 22 May 2020 |
| Zürich | 02/05; 04/05; 11/05; 08/06; 04/07; 01/09; 23/09 |
| Lake | Number of Shots | Dates |
|---|---|---|
| Geneva | 12,195 | 20/04; 04/05; 28/05; 20/06; 01/07; 04/07; 16/07; 18/07; 29/08; 02/09; 21/09; 23/09; 13/10 |
| Neuchâtel | 8522 | 21/04; 28/04; 29/05; 24/06; 20/07; 03/08; 18/08; 19/09; 28/09; 16/10; 25/10 |
| Thun | 1774 | 20/04; 21/04; 18/07; 18/08; 27/09; 25/10 |
| Lucerne | 1813 | 20/04; 22/05; 23/06; 28/06; 18/07; 05/09; 27/09 |
| Zug | 964 | 04/05; 17/06; 04/07; 13/07; 14/09; 23/09 |
| Zürich | 2433 | 02/05; 04/05; 11/05; 08/06; 04/07; 01/09; 23/09 |
| Walensee | 1083 | 20/04; 02/05; 23/06; 27/09; |
| Sempach | 239 | 04/05; 22/05; 08/06; 01/09 |
| Sarnersee | 203 | 20/04; 18/07; 23/07; |
| Lake | Mean Area (km2) [51] | Station | Station ID | Longitude 1 (°) | Latitude 1 (°) | h0 (m) | N (m) | Validation Period |
|---|---|---|---|---|---|---|---|---|
| Geneva | 580 | St-Prex | 2027 | 6.4611379 | 46.4827956 | 421.92 | 49.93 | 01/1995–01/2020 |
| Geneva | 580 | Sécheron | 2028 | 6.1523679 | 46.218622 | 421.82 | 49.83 | 01/1995–01/2020 |
| Neuchâtel | 215 | Grandson | 2154 | 6.6423606 | 46.8057745 | 478.82 | 49.86 | 01/1995–01/2020 |
| Thun | 48 | Spiez, Kraftwerk BKW | 2093 | 7.6645587 | 46.6967403 | 608.09 | 50.09 | 09/2018–01/2020 |
| Lucerne | 114 | Lucerne | 2207 | 8.3198266 | 47.0548813 | 482.03 | 48.08 | 01/1995–01/2020 |
| Lucerne | 114 | Brunnen | 2025 | 8.6037922 | 46.9934707 | 482.49 | 48.52 | 01/1995–01/2020 |
| Zug | 38 | Zug | 2017 | 8.5143326 | 47.1678740 | 451.62 | 47.59 | 01/2018–01/2020 |
| Zürich | 68 | Zürich | 2209 | 8.5504684 | 47.3547707 | 453.21 | 47.32 | 02/2016–01/2020 |
| Zürich (Obersee) | 20 | Schmerikon | 2014 | 8.9400917 | 47.2247744 | 457.25 | 47.32 | 04/2018–01/2020 |
| Walensee | 24 | Murg | 2118 | 9.2100321 | 47.1133767 | 467.07 | 48.13 | 01/1995–01/2020 |
| Sempach | 14 | Sempach | 2168 | 8.1891830 | 47.1342944 | 551.97 | 48.03 | 09/2018–01/2020 |
| Sarnen | 8 | Sarnen | 2088 | 8.2424260 | 46.8877257 | 520.36 | 49.37 | 09/2018–01/2020 |
| Lake | Altimetry Missions | Track | Repeat Orbit (Days) | Distance over the Lake (km) | Valid Data |
|---|---|---|---|---|---|
| Geneva | ERS-2/ENVISAT/SARAL | 0846 | 35 | 9.4 | Yes/No/Yes |
| Geneva | ERS-2/ENVISAT/SARAL | 0887 | 35 | 5.6 | Few/Yes/Yes |
| Geneva | JASON-1/2/3 | 044 | 10 | 5.6 | No/Yes/Yes |
| Geneva | SENTINEL-3A | 0358 | 27 | 12.2 | Yes |
| Geneva | SENTINEL-3A | 0741 | 27 | 4.7 | Yes |
| Geneva | SENTINEL-3B | 0741 | 27 | 11.2 | Yes |
| Neuchâtel | ERS-2/ENVISAT/SARAL | 0343 | 35 | 5.6 | Yes/No/No |
| Neuchâtel | ERS-2/ENVISAT/SARAL | 0846 | 35 | 12.9 | No/Few/No |
| Neuchâtel | SENTINEL-3A | 0358 | 27 | 3.9 | Yes |
| Neuchâtel | SENTINEL-3A | 0741 | 27 | 6.1 | Yes |
| Thun | SENTINEL-3A | 0085 | 27 | 5.5 | Yes |
| Lucerne | ERS-2/ENVISAT/SARAL | 0257 | 35 | 2.4/3.3/2.4 1 | Few/Few/Few |
| Lucerne | ERS-2/ENVISAT/SARAL | 0760 | 35 | 5.8 | Yes/Yes/Yes |
| Lucerne | SENTINEL-3A | 0199 | 27 | 1.3/0.8 1 | Yes |
| Lucerne | SENTINEL-3A | 0586 | 27 | 8.00 | Yes |
| Zürichsee | SENTINEL-3A | 0586 | 27 | 3.1 | Yes |
| Obersee (Zürich) | SENTINEL-3B | 0313 | 27 | 1.5 | Yes |
| Walensee | ERS-2/ENVISAT/SARAL | 0760 | 35 | 1.5 | Few/No/No |
| Walensee | SENTINEL-3B | 0700 | 27 | 1.1 | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frappart, F.; Blarel, F.; Fayad, I.; Bergé-Nguyen, M.; Crétaux, J.-F.; Shu, S.; Schregenberger, J.; Baghdadi, N. Evaluation of the Performances of Radar and Lidar Altimetry Missions for Water Level Retrievals in Mountainous Environment: The Case of the Swiss Lakes. Remote Sens. 2021, 13, 2196. https://doi.org/10.3390/rs13112196
Frappart F, Blarel F, Fayad I, Bergé-Nguyen M, Crétaux J-F, Shu S, Schregenberger J, Baghdadi N. Evaluation of the Performances of Radar and Lidar Altimetry Missions for Water Level Retrievals in Mountainous Environment: The Case of the Swiss Lakes. Remote Sensing. 2021; 13(11):2196. https://doi.org/10.3390/rs13112196
Chicago/Turabian StyleFrappart, Frédéric, Fabien Blarel, Ibrahim Fayad, Muriel Bergé-Nguyen, Jean-François Crétaux, Song Shu, Joël Schregenberger, and Nicolas Baghdadi. 2021. "Evaluation of the Performances of Radar and Lidar Altimetry Missions for Water Level Retrievals in Mountainous Environment: The Case of the Swiss Lakes" Remote Sensing 13, no. 11: 2196. https://doi.org/10.3390/rs13112196