
Formation Techniques Used in Shape-Forming Microrobotic Systems with Multiple Microrobots: A Review
 ,
,  ,
,  ,
,  , and
, and
Abstract
:1. Introduction
2. Shape Formation Techniques
2.1. Shape Formation by Microrobotic Swarms
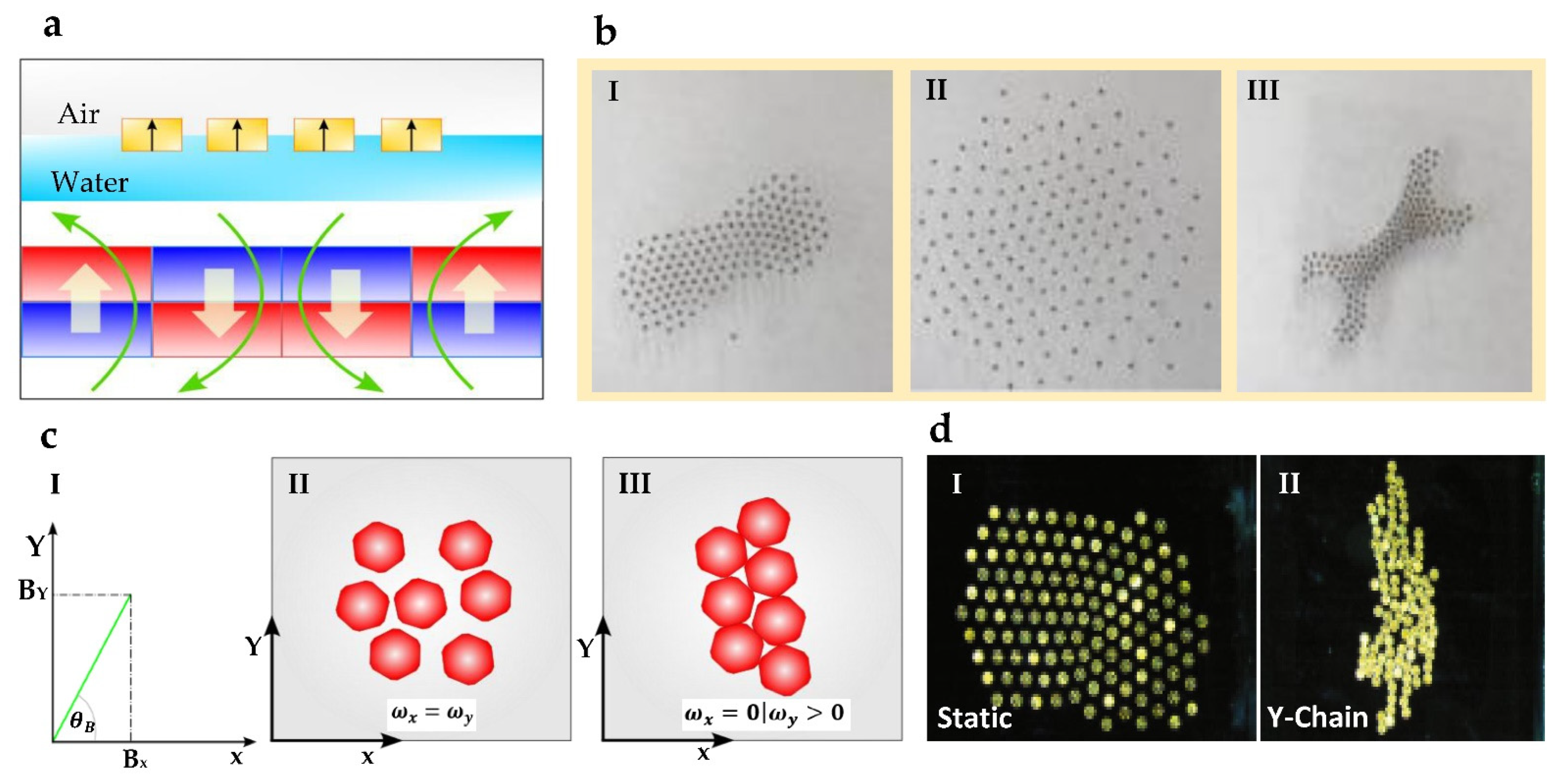
2.1.1. Magnetic Formation
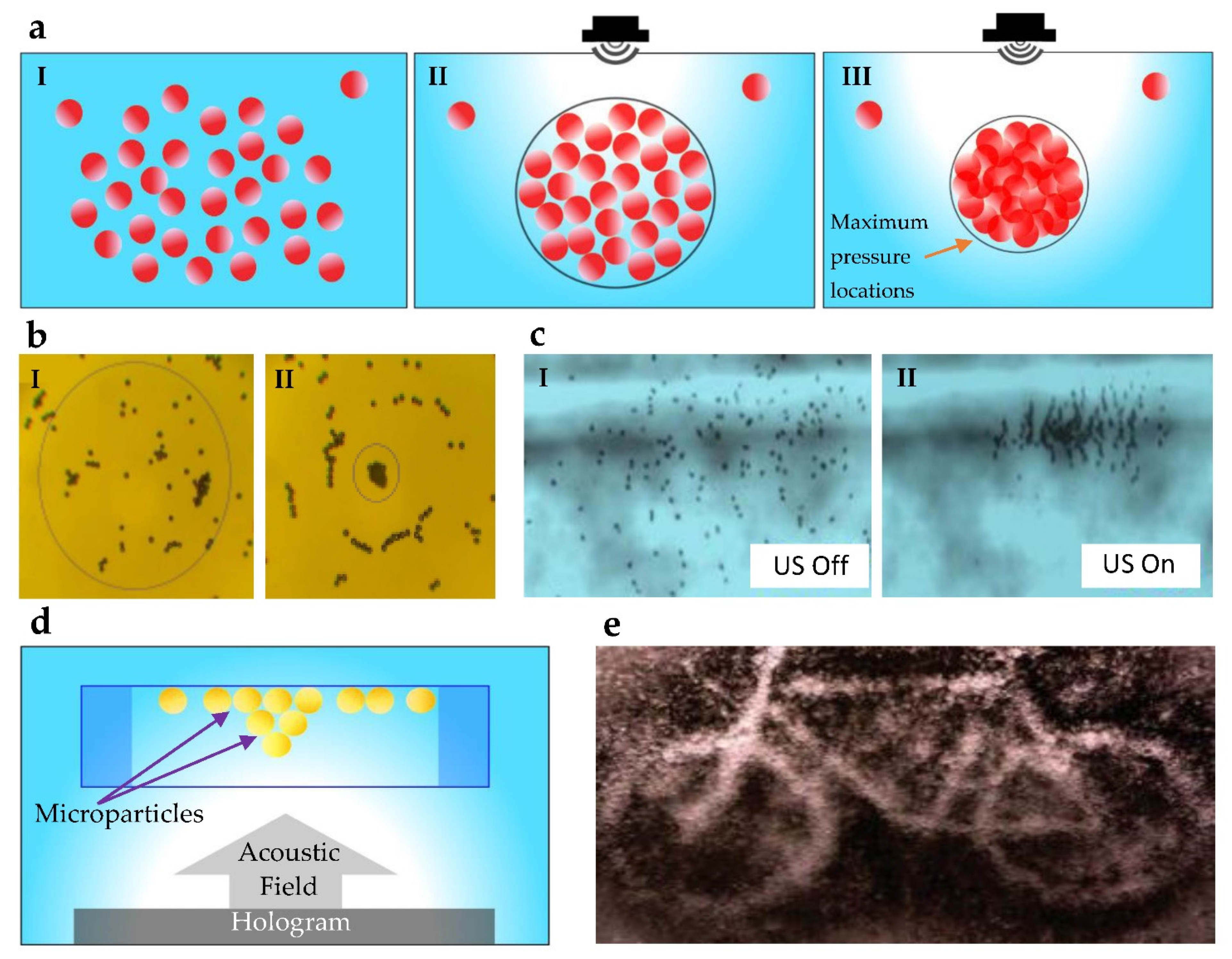
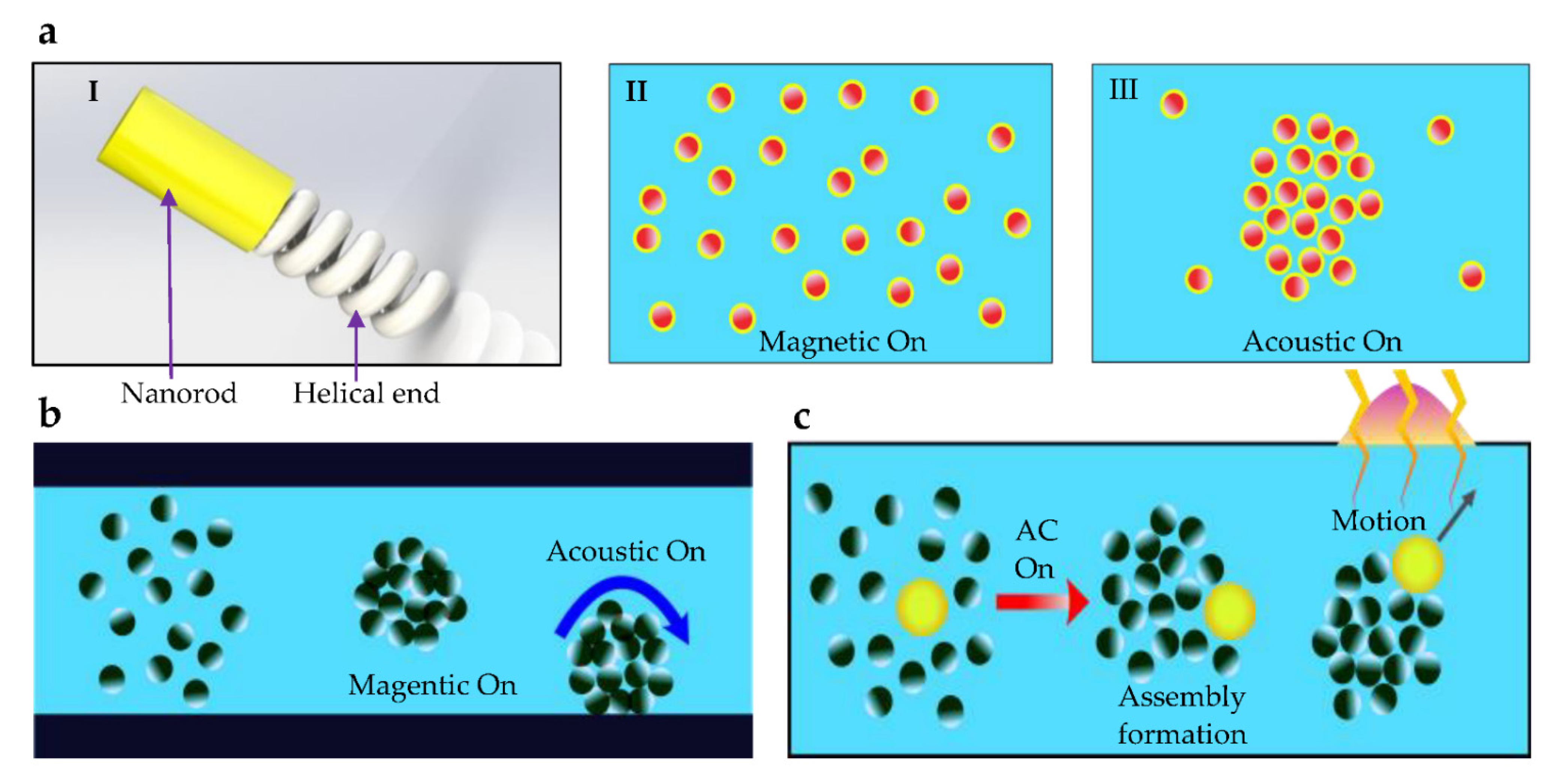
2.1.2. Acoustic Formation
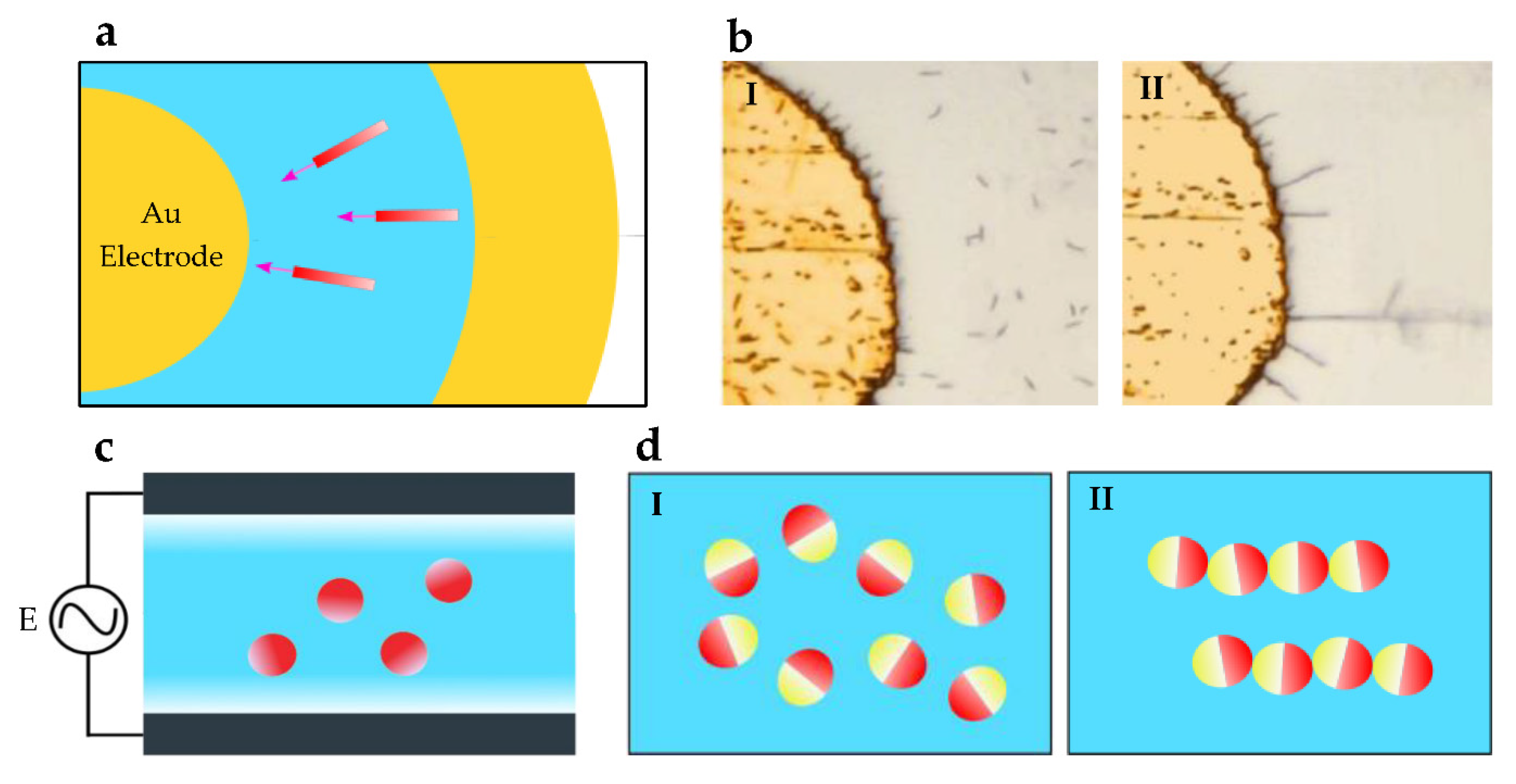
2.1.3. Electric Formation
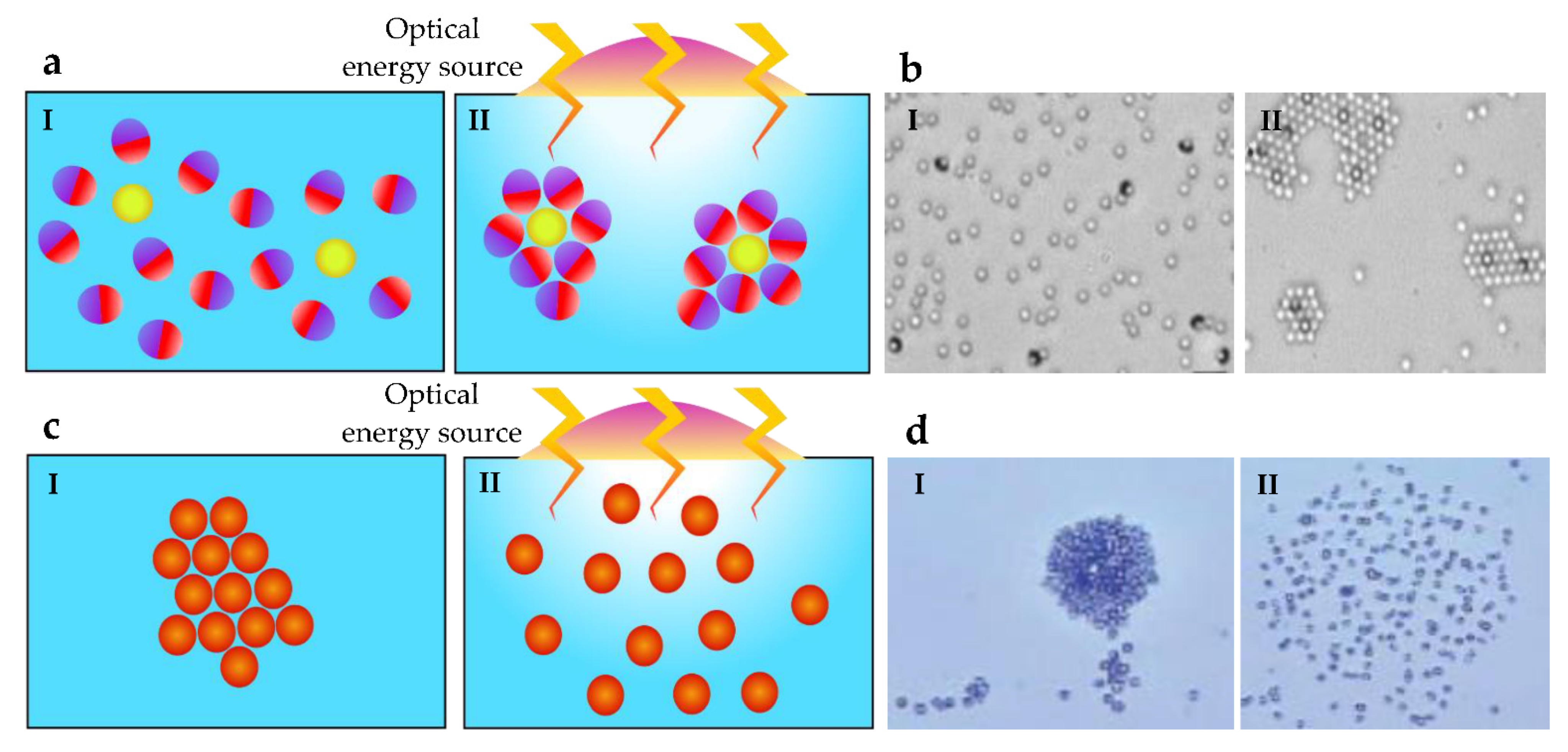
2.1.4. Optical Formation
2.1.5. Hybrid Methods
2.2. Shape Formation by Selectively Controlled Multiple Microagents
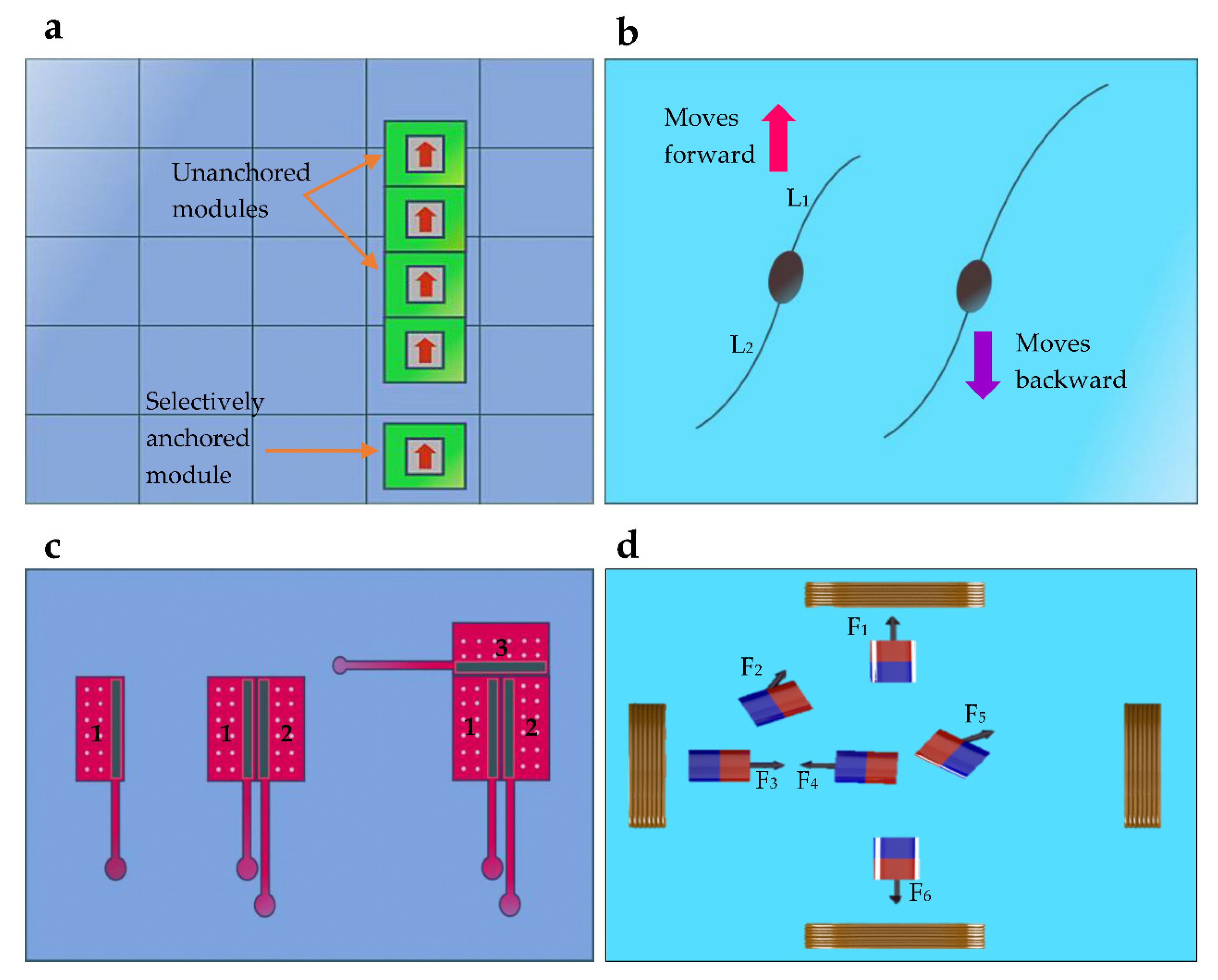
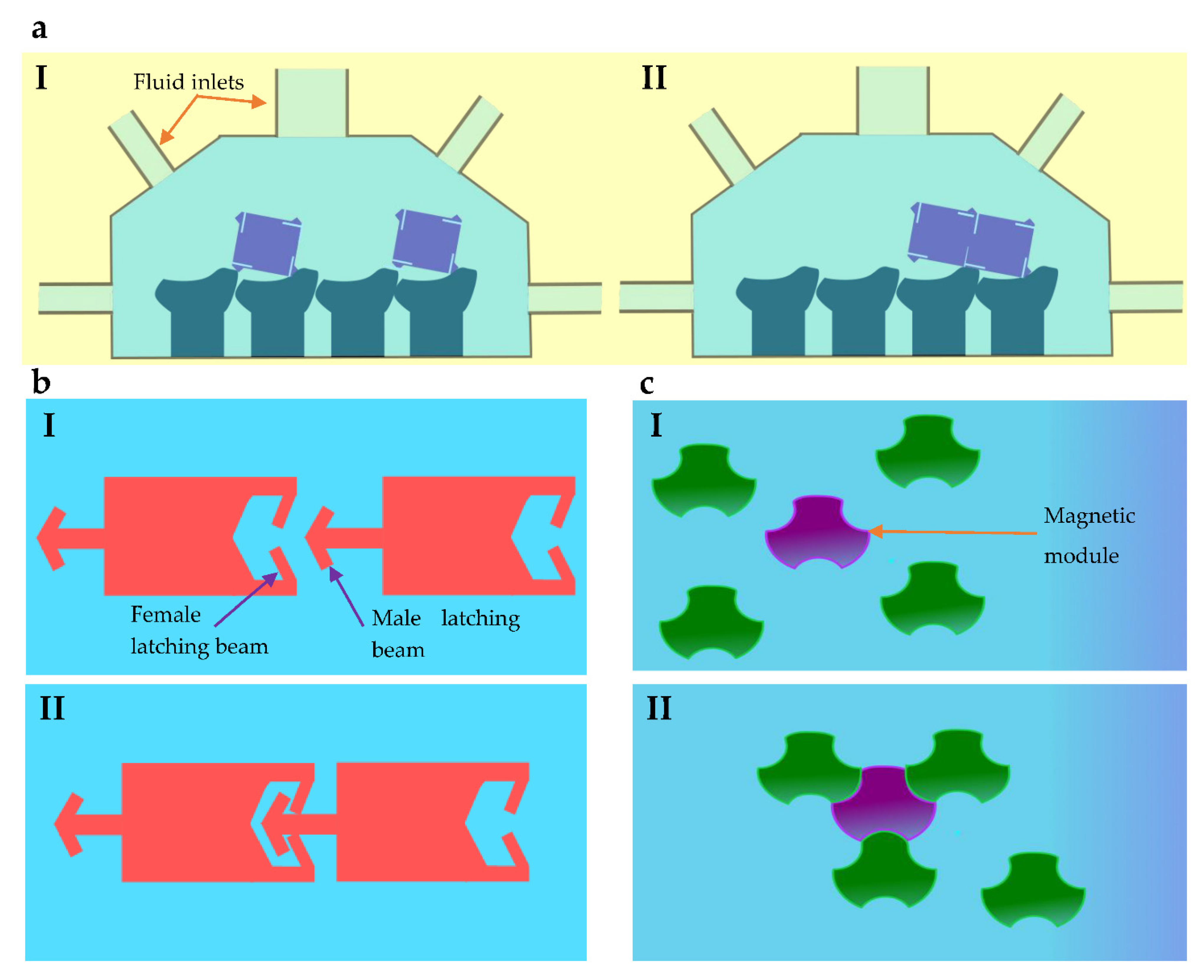
2.2.1. Surface Anchoring
2.2.2. Heterogeneous Design
2.2.3. Non-Uniform Control Input
2.2.4. Other Methods
2.3. Advantages and Challenges of Different Techniques
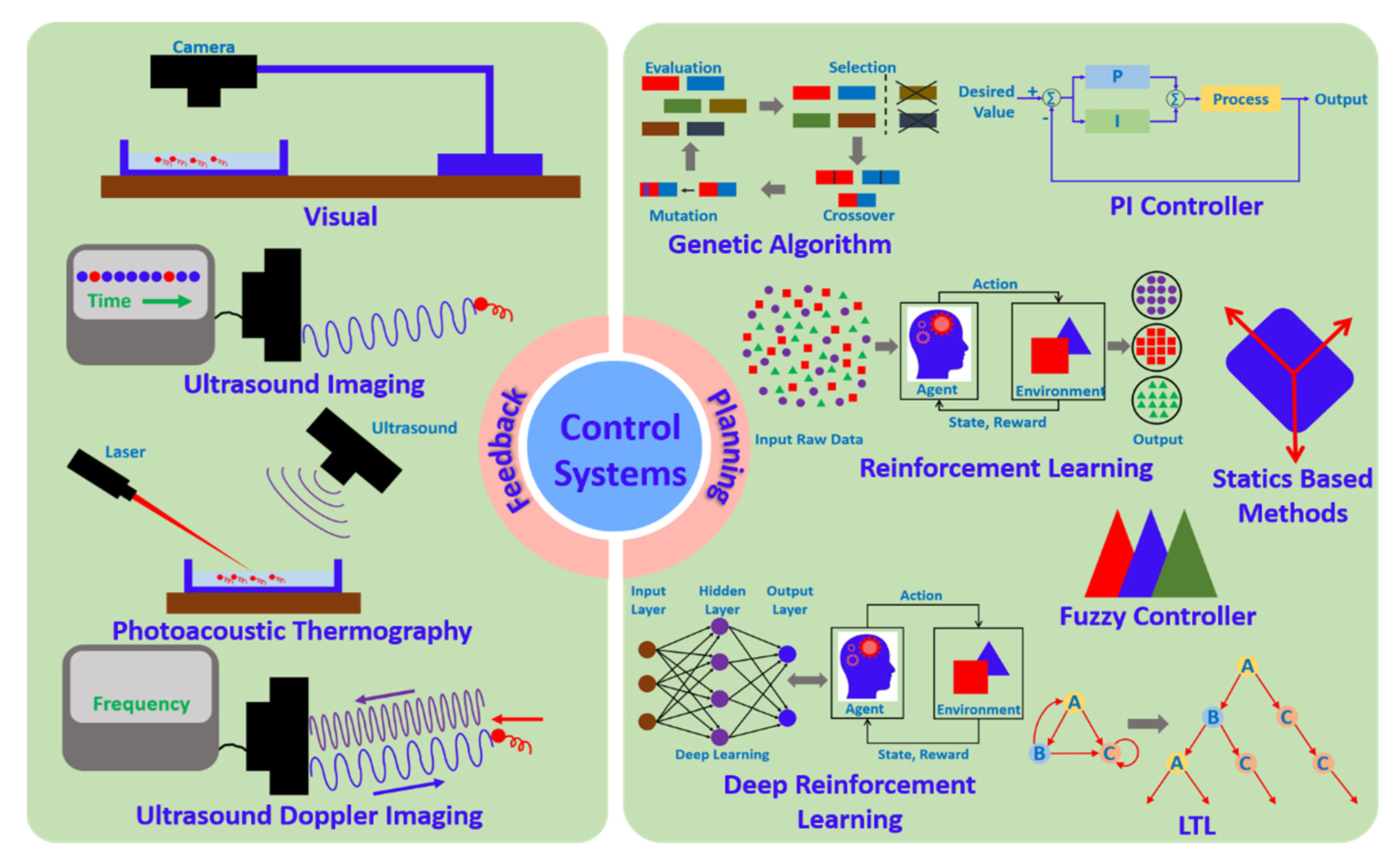
3. Control Systems
4. Discussion and Future Directions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhu, J.; Liu, X.; Shi, Q.; He, T.; Sun, Z.; Guo, X.; Liu, W.; Bin Sulaiman, O.; Dong, B.; Lee, C. Development Trends and Perspectives of Future Sensors and MEMS/NEMS. Micromachines 2020, 11, 7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aydemir, A.; Terzioglu, Y.; Akin, T. A New Design and a Fabrication Approach to Realize a High Performance Three Axes Capacitive MEMS Accelerometer. Sens. Actuators A Phys. 2016, 244, 324–333. [Google Scholar] [CrossRef]
- Konara, K.M.T.M.B.; Amarasinghe, Y.W.R. Design and Simulation of a 4-DoF Vibratory Gyroscope. In Proceedings of the MERCon 2021—7th International Multidisciplinary Moratuwa Engineering Research Conference, Moratuwa, Sri Lanka, 27–29 July 2021; pp. 728–733. [Google Scholar] [CrossRef]
- Geisberger, A.A.; Sarkar, N. Techniques in MEMS Microthermal Actuators and Their Applications. In Mems/Nems; Springer Nature: Cham, Switzerland, 2007; pp. 1191–1251. [Google Scholar] [CrossRef]
- Schiavone, G.; Desmulliez, M.P.Y.; Walton, A.J. Integrated Magnetic MEMS Relays: Status of the Technology. Micromachines 2014, 5, 622–653. [Google Scholar] [CrossRef] [Green Version]
- Blachowicz, T.; Ehrmann, A. 3D Printed MEMS Technology-Recent Developments and Applications. Micromachines 2020, 11, 434. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hunsperger, R.G. Integrated Optics: Theory and Technology, 6th ed.; Springer Nature: Cham, Switzerland, 2009; pp. 1–513. [Google Scholar] [CrossRef]
- Upadhyaya, A.M.; Hasan, M.K.; Abdel-Khalek, S.; Hassan, R.; Srivastava, M.C.; Sharan, P.; Islam, S.; Saad, A.M.E.; Vo, N. A Comprehensive Review on the Optical Micro-Electromechanical Sensors for the Biomedical Application. Front. Public Health 2021, 9, 759032. [Google Scholar] [CrossRef]
- Ashraf, M.W.; Tayyaba, S.; Afzulpurkar, N. Micro Electromechanical Systems (MEMS) Based Microfluidic Devices for Biomedical Applications. Int. J. Mol. Sci. 2011, 12, 3648–3704. [Google Scholar] [CrossRef] [Green Version]
- Mudugamuwa, A.; Hettiarachchi, S.; Melroy, G.; Dodampegama, S.; Konara, M.; Roshan, U.; Amarasinghe, R.; Jayathilaka, D.; Wang, P. Vision-Based Performance Analysis of an Active Microfluidic Droplet Generation System Using Droplet Images. Sensors 2022, 22, 6900. [Google Scholar] [CrossRef]
- Hettiarachchi, S.; Melroy, G.; Mudugamuwa, A.; Sampath, P.; Premachandra, C.; Amarasinghe, R.; Dau, V. Design and Development of a Microfluidic Droplet Generator with Vision Sensing for Lab-on-a-Chip Devices. Sens. Actuators A Phys. 2021, 332, 113047. [Google Scholar] [CrossRef]
- Khan, M.S.; Tariq, M.O.; Nawaz, M.; Ahmed, J. MEMS Sensors for Diagnostics and Treatment in the Fight against COVID-19 and Other Pandemics. IEEE Access 2021, 9, 61123–61149. [Google Scholar] [CrossRef]
- Rosen, Y.; Gurman, P. MEMS and Microfluidics for Diagnostics Devices. Curr. Pharm. Biotechnol. 2010, 11, 366–375. [Google Scholar] [CrossRef]
- Mudugamuwa, A.; Hettiarachchi, S.P.; Basnayake, B.A.D.J.C.K.; Melroy, N.H.R.G.; Amarasinghe, R. Review on Photomicrography Based Full Blood Count (FBC) Testing and Recent Advancements. Adv. Technol. 2021, 1, 422–453. [Google Scholar] [CrossRef]
- Melroy, G.; Mudugamuwa, A.; Hettiarachchi, S. PZT Based Active Microfluidic Droplet Generator for Lab-on-a-Chip Devices; Scholz, S.G., Howlett, R.J., Setchi, R., Eds.; Springer: Singapore, 2022; Volume 262, pp. 277–289. [Google Scholar]
- Puri, P.; Kumar, V.; Ananthasubramanian, M.; Sharma, N.N. Design, Simulation and Fabrication of MEMS Based Dielectrophoretic Separator for Bio-Particles. Microsyst. Technol. 2017, 23, 3371–3379. [Google Scholar] [CrossRef]
- Cobo, A.; Sheybani, R.; Meng, E. MEMS: Enabled Drug Delivery Systems. Adv. Healthc. Mater. 2015, 4, 969–982. [Google Scholar] [CrossRef]
- Pacchierotti, C.; Scheggi, S.; Prattichizzo, D.; Misra, S. Haptic Feedback for Microrobotics Applications: A Review. Front. Robot. AI 2016, 3, 53. [Google Scholar] [CrossRef] [Green Version]
- Bellouard, Y. Microrobotics: Methods and Applications; CRC Press: Boca Raton, FL, USA, 2010; ISBN 9781420061956. [Google Scholar]
- Xu, K.; Liu, B. Recent Progress in Actuation Technologies of Micro/Nanorobots. Beilstein J. Nanotechnol. 2021, 12, 756–765. [Google Scholar] [CrossRef]
- Pané, S.; Wendel-Garcia, P.; Belce, Y.; Chen, X.-Z.; Puigmartí-Luis, J. Powering and Fabrication of Small-Scale Robotics Systems. Curr. Robot. Rep. 2021, 2, 427–440. [Google Scholar] [CrossRef]
- Ghodssi, R.; Lin, P. MEMS Materials and Processes Handbook; Ghodssi, R., Lin, P., Eds.; MEMS Reference Shelf; Springer: Boston, MA, USA, 2011; Volume 1, ISBN 978-0-387-47316-1. [Google Scholar]
- Diller, E. Micro-Scale Mobile Robotics. Found. Trends Robot. 2011, 2, 143–259. [Google Scholar] [CrossRef]
- Ceylan, H.; Giltinan, J.; Kozielski, K.; Sitti, M. Mobile Microrobots for Bioengineering Applications. Lab Chip 2017, 17, 1705–1724. [Google Scholar] [CrossRef] [Green Version]
- Jang, D.; Jeong, J.; Song, H.; Chung, S.K. Targeted Drug Delivery Technology Using Untethered Microrobots: A Review. J. Micromech. Microeng. 2019, 29, 053002. [Google Scholar] [CrossRef]
- Dragomir, F.; Dragomir, O.E. Microrobotics: Present, Challenges, Perspectives. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 1904–1909. [Google Scholar]
- Dodampegama, S.K.; Konara, K.M.T.M.B.; Munasinghe, M.A.A.; Amarasinghe, Y.W.R. Design and Analysis of Hybrid Robotic Mechanisms Using SCARA and RCM Mechanisms. In Proceedings of the 2020 From Innovation to Impact (FITI), Colombo, Sri Lanka, 15 December 2020; pp. 1–5. [Google Scholar]
- Konara, K.M.T.M.B.; Munasinghe, M.A.A.; Dodampegama, S.K.; Amarasinghe, Y.W.R. Design and Analysis of an Autonomously Guided Vehicle to Minimize the Impact of COVID-19. In Proceedings of the 2020 From Innovation to Impact (FITI), Colombo, Sri Lanka, 15 December 2020. [Google Scholar] [CrossRef]
- Khatmi, E.; Elmenreich, W.; Wogatai, K.; Schranz, M.; Umlauft, M.; Laure, W.; Wuttei, A. Swarm Intelligence Layer to Control Autonomous Agents (SWILT). CEUR Workshop. Proc. 2019, 2405, 91–96. [Google Scholar]
- Petersen, K.; Nagpal, R.; Werfel, J. TERMES: An Autonomous Robotic System for Three-Dimensional Collective Construction. Robot. Sci. Syst. 2012, 7, 257–264. [Google Scholar] [CrossRef]
- Zykov, V.; Mytilinaios, E.; Desnoyer, M.; Lipson, H. Evolved and Designed Self-Reproducing Modular Robotics. IEEE Trans. Robot. 2007, 23, 308–319. [Google Scholar] [CrossRef]
- York, D.G.; Welty, D.E.; Zwitter, T.; Finkbeiner, D.P.; Davis, M.; Solomon, P.M.; Scoville, N.Z.; Brand, J.; Burton, W.B.; Kwee, K.K.; et al. Programmable Self-Assembly in a Thousand-Robot Swarm. Science 2014, 345, 795–800. [Google Scholar]
- Tilman, D.; Balzer, C.; Hill, J.; Befort, B.L. Global Food Demand and the Sustainable Intensification of Agriculture. Proc. Natl. Acad. Sci. USA 2011, 108, 20260–20264. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm Robotic Behaviors and Current Applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef] [Green Version]
- Diller, E.; Pawashe, C.; Floyd, S.; Sitti, M. Assembly and Disassembly of Magnetic Mobile Micro-Robots towards Deterministic 2-D Reconfigurable Micro-Systems. Int. J. Robot. Res. 2011, 30, 1667–1680. [Google Scholar] [CrossRef]
- Perera, K.N.M.; Amarasinghe, Y.W.R.; Dao, D.V. An Artificial Appendage for Swimming Microrobots in Non-Newtonian Fluids. In Proceedings of the MERCon 2021—7th International Multidisciplinary Moratuwa Engineering Research Conference, Moratuwa, Sri Lanka, 27–29 July 2021; pp. 723–727. [Google Scholar] [CrossRef]
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for Minimally Invasive Medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef]
- Shao, Y.; Fahmy, A.; Li, M.; Li, C.; Zhao, W.; Sienz, J. Study on Magnetic Control Systems of Micro-Robots. Front. Neurosci. 2021, 15, 736730. [Google Scholar] [CrossRef]
- Li, J.; De Ávila, B.E.F.; Gao, W.; Zhang, L.; Wang, J. Micro/Nanorobots for Biomedicine: Delivery, Surgery, Sensing, and Detoxification. Sci. Robot. 2017, 2, eaam6431. [Google Scholar] [CrossRef]
- Dong, X.; Sitti, M. Controlling Two-Dimensional Collective Formation and Cooperative Behavior of Magnetic Microrobot Swarms. Int. J. Robot. Res. 2020, 39, 617–638. [Google Scholar] [CrossRef]
- Xu, T.; Luo, Y.; Liu, C.; Liu, C.; Zhang, X.; Wang, S. Integrated Ultrasonic Aggregation-Induced Enrichment with Raman Enhancement for Ultrasensitive and Rapid Biosensing. Anal. Chem. 2020, 92, 7816–7821. [Google Scholar] [CrossRef]
- Murata, S.; Kurokawa, H. Self-Reconfigurable Robots. IEEE Robot. Autom. Mag. 2007, 14, 71–78. [Google Scholar] [CrossRef]
- Hoff, N.; Wood, R.; Nagpal, R. Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4989–4994. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Yu, J.; Yang, S.; Wang, B.; Nelson, B.J.; Zhang, L. A Survey on Swarm Microrobotics. IEEE Trans. Robot. 2021, 38, 1531–1551. [Google Scholar] [CrossRef]
- Xie, H.; Sun, M.; Fan, X.; Lin, Z.; Chen, W.; Wang, L.; Dong, L.; He, Q. Reconfigurable Magnetic Microrobot Swarm: Multimode Transformation, Locomotion, and Manipulation. Sci. Robot. 2019, 4, eaav8006. [Google Scholar] [CrossRef]
- Hou, Z.; Zhou, Z.; Liu, P.; Pei, Y. Robotic Trajectories and Morphology Manipulation of Single Particle and Granular Materials by a Vibration Tweezer. Soft Robot. 2021, 8, 1–9. [Google Scholar] [CrossRef]
- Zhou, Z.; Hou, Z.; Pei, Y. Reconfigurable Particle Swarm Robotics Powered by Acoustic Vibration Tweezer. Soft Robot. 2021, 8, 735–743. [Google Scholar] [CrossRef]
- Xu, T.; Soto, F.; Gao, W.; Dong, R.; Garcia-Gradilla, V.; Magaña, E.; Zhang, X.; Wang, J. Reversible Swarming and Separation of Self-Propelled Chemically Powered Nanomotors under Acoustic Fields. J. Am. Chem. Soc. 2015, 137, 2163–2166. [Google Scholar] [CrossRef] [Green Version]
- Yan, J.; Han, M.; Zhang, J.; Xu, C.; Luijten, E.; Granick, S. Reconfiguring Active Particles by Electrostatic Imbalance. Nat. Mater. 2016, 15, 1095–1099. [Google Scholar] [CrossRef]
- Liang, X.; Mou, F.; Huang, Z.; Zhang, J.; You, M.; Xu, L.; Luo, M.; Guan, J. Hierarchical Microswarms with Leader–Follower-Like Structures: Electrohydrodynamic Self-Organization and Multimode Collective Photoresponses. Adv. Funct. Mater. 2020, 30, 1908602. [Google Scholar] [CrossRef]
- Fan, D.L.; Zhu, F.Q.; Cammarata, R.C.; Chien, C.L. Electric Tweezers. Nano Today 2011, 6, 339–354. [Google Scholar] [CrossRef]
- Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, 1906766. [Google Scholar] [CrossRef] [PubMed]
- Cohen, J.A.; Golestanian, R. Emergent Cometlike Swarming of Optically Driven Thermally Active Colloids. Phys. Rev. Lett. 2014, 112, 068302. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Singh, D.P.; Choudhury, U.; Fischer, P.; Mark, A.G. Non-Equilibrium Assembly of Light-Activated Colloidal Mixtures. Adv. Mater. 2017, 29, 1701328. [Google Scholar] [CrossRef] [PubMed]
- Pawashe, C.; Floyd, S.; Sitti, M. Multiple Magnetic Microrobot Control Using Electrostatic Anchoring. Appl. Phys. Lett. 2009, 94, 164108. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Yang, Z.; Ferreira, A.; Zhang, L. Control and Autonomy of Microrobots: Recent Progress and Perspective. Adv. Intell. Syst. 2022, 4, 2100279. [Google Scholar] [CrossRef]
- Pawashe, C.; Diller, E.; Floyd, S.; Sitti, M. Assembly and Disassembly of Magnetic Mobile Micro-Robots towards Deterministic 2-d Reconfigurable Micro-Systems. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 261–266. [Google Scholar] [CrossRef]
- Donald, B.R.; Levey, C.G.; Paprotny, I.; Rus, D. Planning and Control for Microassembly of Structures Composed of Stress-Engineered MEMS Microrobots. Int. J. Robot. Res. 2013, 32, 218–246. [Google Scholar] [CrossRef] [Green Version]
- Khalil, I.S.M.; Tabak, A.F.; Hamed, Y.; Tawakol, M.; Klingner, A.; El Gohary, N.; Mizaikoff, B.; Sitti, M. Independent Actuation of Two-Tailed Microrobots. IEEE Robot. Autom. Lett. 2018, 3, 1703–1710. [Google Scholar] [CrossRef]
- Floyd, S.; Diller, E.; Pawashe, C.; Sitti, M. Control Methodologies for a Heterogeneous Group of Untethered Magnetic Micro-Robots. Int. J. Robot. Res. 2011, 30, 1553–1565. [Google Scholar] [CrossRef]
- Yousefi, M.; Nejat Pishkenari, H. Independent Position Control of Two Identical Magnetic Microrobots in a Plane Using Rotating Permanent Magnets. J. Micro-Bio Robot. 2021, 17, 59–67. [Google Scholar] [CrossRef]
- Kawaguchi, T.; Inoue, Y.; Ikeuchi, M.; Ikuta, K. Independent actuation and master-slave control of multiple micro magnetic actuators. In Proceedings of the 2018 IEEE Micro Electro Mechanical Systems (MEMS), Belfast, UK, 21–25 January 2018; pp. 190–193. [Google Scholar]
- Yang, L.; Zhang, L. Motion Control in Magnetic Microrobotics: From Individual and Multiple Robots to Swarms. Annu. Rev. Control. Robot. Auton. Syst. 2021, 4, 509–534. [Google Scholar] [CrossRef]
- Koleoso, M.; Feng, X.; Xue, Y.; Li, Q.; Munshi, T.; Chen, X. Micro/Nanoscale Magnetic Robots for Biomedical Applications. Mater. Today Bio 2020, 8, 100085. [Google Scholar] [CrossRef]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Yigit, B.; Alapan, Y.; Sitti, M. Programmable Collective Behavior in Dynamically Self-Assembled Mobile Microrobotic Swarms. Adv. Sci. 2019, 6, 1801837. [Google Scholar] [CrossRef] [Green Version]
- Gardi, G.; Ceron, S.; Wang, W.; Petersen, K.; Sitti, M. Microrobot Collectives with Reconfigurable Morphologies, Behaviors, and Functions. Nat. Commun. 2022, 13, 2239. [Google Scholar] [CrossRef]
- Yu, J.; Jin, D.; Chan, K.F.; Wang, Q.; Yuan, K.; Zhang, L. Active Generation and Magnetic Actuation of Microrobotic Swarms in Bio-Fluids. Nat. Commun. 2019, 10, 5631. [Google Scholar] [CrossRef]
- Courtney, C.R.P.; Demore, C.E.M.; Wu, H.; Grinenko, A.; Wilcox, P.D.; Cochran, S.; Drinkwater, B.W. Independent Trapping and Manipulation of Microparticles Using Dexterous Acoustic Tweezers. Appl. Phys. Lett. 2014, 104, 154103. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Teh, S.Y.; Lee, A.; Kim, H.H.; Lee, C.; Shung, K.K. Single Beam Acoustic Trapping. Appl. Phys. Lett. 2009, 95, 2013–2016. [Google Scholar] [CrossRef] [Green Version]
- Aghakhani, A.; Yasa, O.; Wrede, P.; Sitti, M. Acoustically Powered Surface-Slipping Mobile Microrobots. Proc. Natl. Acad. Sci. USA 2020, 117, 3469–3477. [Google Scholar] [CrossRef] [Green Version]
- Hernando-García, J.; García-Caraballo, J.L.; Ruiz-Díez, V.; Sánchez-Rojas, J.L. Comparative Study of Traveling and Standing Wave-Based Locomotion of Legged Bidirectional Miniature Piezoelectric Robots. Micromachines 2021, 12, 171. [Google Scholar] [CrossRef]
- Melde, K.; Mark, A.G.; Qiu, T.; Fischer, P. Holograms for Acoustics. Nature 2016, 537, 518–522. [Google Scholar] [CrossRef]
- Xiao, Y.; Zhang, J.; Fang, B.; Zhao, X.; Hao, N. Acoustics-Actuated Microrobots. Micromachines 2022, 13, 481. [Google Scholar] [CrossRef] [PubMed]
- Melde, K.; Choi, E.; Wu, Z.; Palagi, S.; Qiu, T.; Fischer, P. Acoustic Fabrication via the Assembly and Fusion of Particles. Adv. Mater. 2018, 30, 1704507. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Zhang, L. Reconfigurable Colloidal Microrobotic Swarm for Targeted Delivery. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 24–27 June 2019; pp. 615–616. [Google Scholar] [CrossRef]
- Prieve, D.C.; Sides, P.J.; Wirth, C.L. 2-D Assembly of Colloidal Particles on a Planar Electrode. Curr. Opin. Colloid Interface Sci. 2010, 15, 160–174. [Google Scholar] [CrossRef]
- Yeh, S.R.; Seul, M.; Shraiman, B.I. Assembly of Ordered Colloidal Aggregates by Electric-Field-Induced Fluid Flow. Nature 1997, 386, 57–59. [Google Scholar] [CrossRef] [PubMed]
- Garćs-Chávez, V.; Dholakia, K.; Spalding, G.C. Extended-Area Optically Induced Organization of Microparticles on a Surface. Appl. Phys. Lett. 2005, 86, 031106. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, J.; Mou, F.; Guan, J. Light-Controlled Swarming and Assembly of Colloidal Particles. Micromachines 2018, 9, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Golestanian, R.; Liverpool, T.B.; Ajdari, A. Designing Phoretic Micro- and Nano-Swimmers. New J. Phys. 2007, 9, 126. [Google Scholar] [CrossRef]
- Ibele, M.; Mallouk, T.E.; Sen, A. Schooling Behavior of Light-Powered Autonomous Micromotors in Water. Angew. Chem. Int. Ed. 2009, 48, 3308–3312. [Google Scholar] [CrossRef]
- Hong, Y.; Diaz, M.; Córdova-Fteueroa, U.M.; Sen, A. Light-Driven Titanium-Dioxide-Based Reversible Microfireworks and Micromotor/Micropump Systems. Adv. Funct. Mater. 2010, 20, 1568–1576. [Google Scholar] [CrossRef]
- Li, J.; Li, T.; Xu, T.; Kiristi, M.; Liu, W.; Wu, Z.; Wang, J. Magneto—Acoustic Hybrid Nanomotor. Nano Lett. 2015, 15, 4814–4821. [Google Scholar] [CrossRef]
- Ahmed, D.; Baasch, T.; Blondel, N.; Läubli, N.; Dual, J.; Nelson, B.J. Neutrophil-Inspired Propulsion in a Combined Acoustic and Magnetic Field. Nat. Commun. 2017, 8, 770. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marintcheva, B. Viruses as Nanoparticles. In Harnessing the Power of Viruses; Elsevier: Amsterdam, The Netherlands, 2018; pp. 161–193. ISBN 9780128105146. [Google Scholar]
- Ji, F.; Jin, D.; Wang, B.; Zhang, L. Light-Driven Hovering of a Magnetic Microswarm in Fluid. ACS Nano 2020, 14, 6990–6998. [Google Scholar] [CrossRef] [PubMed]
- Donald, B.R.; Levey, C.G.; Paprotny, I. Assembly of Planar Structures by Parallel Actuation of Mems Microrobots. Technol. Dig.-Solid-State Sens. Actuators Microsyst. Workshop 2008, 17, 202–207. [Google Scholar] [CrossRef]
- Wong, D.; Steager, E.B.; Kumar, V. Independent Control of Identical Magnetic Robots in a Plane. IEEE Robot. Autom. Lett. 2016, 1, 554–561. [Google Scholar] [CrossRef]
- Donald, B.R.; Levey, C.G.; McGray, C.D.; Rus, D.; Sinclair, M. Power Delivery and Locomotion of Untethered Microactuators. J. Microelectromech. Syst. 2003, 12, 947–959. [Google Scholar] [CrossRef]
- Diller, E.; Floyd, S.; Pawashe, C.; Sitti, M. Control of Multiple Heterogeneous Magnetic Micro-Robots on Non-Specialized Surfaces. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; Volume 28, pp. 115–120. [Google Scholar] [CrossRef]
- Hoselitz, K. Modern Magnetic Materials; Wiley-Interscience: Hoboken, NJ, USA, 1962; Volume 13, ISBN 0471155667. [Google Scholar]
- Vach, P.J.; Klumpp, S.; Faivre, D. Steering Magnetic Micropropellers along Independent Trajectories. J. Phys. D Appl. Phys. 2015, 49, 65003. [Google Scholar] [CrossRef] [Green Version]
- Mahoney, A.W.; Nelson, N.D.; Peyer, K.E.; Nelson, B.J.; Abbott, J.J. Behavior of Rotating Magnetic Microrobots above the Step-out Frequency with Application to Control of Multi-Microrobot Systems. Appl. Phys. Lett. 2014, 104, 144101. [Google Scholar] [CrossRef] [Green Version]
- Kei Cheang, U.; Lee, K.; Julius, A.A.; Kim, M.J. Multiple-Robot Drug Delivery Strategy through Coordinated Teams of Microswimmers. Appl. Phys. Lett. 2014, 105, 8–13. [Google Scholar] [CrossRef] [Green Version]
- Tolley, M.T.; Krishnan, M.; Erickson, D.; Lipson, H. Dynamically Programmable Fluidic Assembly. Appl. Phys. Lett. 2008, 93, 254105. [Google Scholar] [CrossRef] [Green Version]
- Chung, S.E.; Park, W.; Shin, S.; Lee, S.A.; Kwon, S. Guided and Fluidic Self-Assembly of Microstructures Using Railed Microfluidicchannels. Nat. Mater. 2008, 7, 581–587. [Google Scholar] [CrossRef]
- Diller, E.; Zhang, N.; Sitti, M. Modular Micro-Robotic Assembly through Magnetic Actuation and Thermal Bonding. J. Micro-Bio Robot. 2013, 8, 121–131. [Google Scholar] [CrossRef]
- Wang, B.; Kostarelos, K.; Nelson, B.J.; Zhang, L. Trends in Micro-/Nanorobotics: Materials Development, Actuation, Localization, and System Integration for Biomedical Applications. Adv. Mater. 2021, 33, e2002047. [Google Scholar] [CrossRef]
- Li, Z.; Li, C.; Dong, L.; Zhao, J. A Review of Microrobot’s System: Towards System Integration for Autonomous Actuation in Vivo. Micromachines 2021, 12, 1249. [Google Scholar] [CrossRef]
- Fu, Y.; Yu, H.; Zhang, X.; Malgaretti, P.; Kishore, V.; Wang, W. Microscopic Swarms: From Active Matter Physics to Biomedical and Environmental Applications. Micromachines 2022, 13, 295. [Google Scholar] [CrossRef]
- Palagi, S.; Mark, A.G.; Reigh, S.Y.; Melde, K.; Qiu, T.; Zeng, H.; Parmeggiani, C.; Martella, D.; Sanchez-Castillo, A.; Kapernaum, N.; et al. Structured Light Enables Biomimetic Swimming and Versatile Locomotion of Photoresponsive Soft Microrobots. Nat. Mater. 2016, 15, 647–653. [Google Scholar] [CrossRef] [Green Version]
- Bunea, A.; Martella, D.; Nocentini, S.; Parmeggiani, C.; Taboryski, R.; Wiersma, D.S. Light-Powered Microrobots: Challenges and Opportunities for Hard and Soft Responsive Microswimmers. Adv. Intell. Syst. 2021, 3, 2000256. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Zhang, L. Micromanipulation Using Reconfigurable Self-Assembled Magnetic Droplets With Needle Guidance. IEEE Trans. Autom. Sci. Eng. 2022, 19, 759–771. [Google Scholar] [CrossRef]
- Nguyen, H.D.; Yoshihara, I.; Yamamori, K.; Yasunaga, M. Implementation of an Effective Hybrid GA for Large-Scale Traveling Salesman Problems. IEEE Trans. Syst. Man Cybern. Part B 2007, 37, 92–99. [Google Scholar] [CrossRef]
- Xie, H.; Fan, X.; Sun, M.; Lin, Z.; He, Q.; Sun, L. Programmable Generation and Motion Control of a Snakelike Magnetic Microrobot Swarm. IEEE/ASME Trans. Mechatron. 2019, 24, 902–912. [Google Scholar] [CrossRef]
- Colabrese, S.; Gustavsson, K.; Celani, A.; Biferale, L. Flow Navigation by Smart Microswimmers via Reinforcement Learning. Phys. Rev. Lett. 2017, 118, 158004. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Bevan, M.A.; Li, B. Micro/Nano Motor Navigation and Localization via Deep Reinforcement Learning. Adv. Theory Simul. 2020, 3, 2000034. [Google Scholar] [CrossRef]
- Yang, L.; Yu, J.; Zhang, L. A Mobile Paramagnetic Nanoparticle Swarm with Automatic Shape Deformation Control. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9230–9236. [Google Scholar] [CrossRef]
- Yang, L.; Yu, J.; Zhang, L. Statistics-Based Automated Control for a Swarm of Paramagnetic Nanoparticles in 2-D Space. IEEE Trans. Robot. 2020, 36, 254–270. [Google Scholar] [CrossRef]
- Kantaros, Y.; Johnson, B.V.; Chowdhury, S.; Cappelleri, D.J.; Zavlanos, M.M. Control of Magnetic Microrobot Teams for Temporal Micromanipulation Tasks. IEEE Trans. Robot. 2018, 34, 1472–1489. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Yang, L.; Yu, J.; Chiu, P.W.Y.; Zheng, Y.P.; Zhang, L. Real-Time Magnetic Navigation of a Rotating Colloidal Microswarm under Ultrasound Guidance. IEEE Trans. Biomed. Eng. 2020, 67, 3403–3412. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Zhang, L. External Power-Driven Microrobotic Swarm: From Fundamental Understanding to Imaging-Guided Delivery. ACS Nano 2021, 15, 149–174. [Google Scholar] [CrossRef]
- Yang, Z.; Yang, L.; Zhang, L. 3-D Visual Servoing of Magnetic Miniature Swimmers Using Parallel Mobile Coils. IEEE Trans. Med. Robot. Bionics 2020, 2, 608–618. [Google Scholar] [CrossRef]
- Wang, Q.; Chan, K.F.; Schweizer, K.; Du, X.; Jin, D.; Yu, S.C.H.; Nelson, B.J.; Zhang, L. Ultrasound Doppler-Guided Real-Time Navigation of a Magnetic Microswarm for Active Endovascular Delivery. Sci. Adv. 2021, 7, eabe5914. [Google Scholar] [CrossRef]
- Wu, Z.; Li, L.; Yang, Y.; Hu, P.; Li, Y.; Yang, S.Y.; Wang, L.V.; Gao, W. A Microrobotic System Guided by Photoacoustic Computed Tomography for Targeted Navigation in Intestines in Vivo. Sci. Robot. 2019, 4, aax0613. [Google Scholar] [CrossRef] [Green Version]
- Xu, D.; Hu, J.; Pan, X.; Sánchez, S.; Yan, X.; Ma, X. Enzyme-Powered Liquid Metal Nanobots Endowed with Multiple Biomedical Functions. ACS Nano 2021, 15, 11543–11554. [Google Scholar] [CrossRef]
- Martel, S.; Mohammadi, M.; Felfoul, O.; Zhao, L.; Pouponneau, P. Flagellated Magnetotactic Bacteria as Controlled MRI-Trackable Propulsion and Steering Systems for Medical Nanorobots Operating in the Human Microvasculature. Int. J. Robot. Res. 2009, 28, 571–582. [Google Scholar] [CrossRef] [Green Version]
- Denasi, A.; Misra, S. Independent and Leader-Follower Control for Two Magnetic Micro-Agents. IEEE Robot. Autom. Lett. 2018, 3, 218–225. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Technique | Key Features | Ref. |
|---|---|---|---|
| Collectively actuated multiple microrobotic systems | Magnetic |
| [40,44,45] |
| Acoustic |
| [46,47,48] | |
| Electric |
| [49,50,51] | |
| Optical |
| [52,53,54] | |
| Selectively actuated multiple microrobotic systems | Surface anchoring |
| [55,56,57] |
| Heterogeneous Design |
| [58,59,60] | |
| Non-uniform control input |
| [61,62,63] |
| Method | Technique | Advantages | Challenges | Ref. |
|---|---|---|---|---|
| Collectively actuated multiple microrobotic systems | Magnetic |
|
| [40,52,67] |
| Acoustic |
|
| [20,74,99] | |
| Electric |
|
| [50,100,101] | |
| Optical |
|
| [52,102,103] | |
| Selectively actuated multiple microrobotic systems | Heterogeneous design |
|
| [59,90,91] |
| Surface anchoring |
|
| [57,63] | |
| Non-uniform input |
|
| [56,63,89] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Konara, M.; Mudugamuwa, A.; Dodampegama, S.; Roshan, U.; Amarasinghe, R.; Dao, D.V. Formation Techniques Used in Shape-Forming Microrobotic Systems with Multiple Microrobots: A Review. Micromachines 2022, 13, 1987. https://doi.org/10.3390/mi13111987
Konara M, Mudugamuwa A, Dodampegama S, Roshan U, Amarasinghe R, Dao DV. Formation Techniques Used in Shape-Forming Microrobotic Systems with Multiple Microrobots: A Review. Micromachines. 2022; 13(11):1987. https://doi.org/10.3390/mi13111987
Chicago/Turabian StyleKonara, Menaka, Amith Mudugamuwa, Shanuka Dodampegama, Uditha Roshan, Ranjith Amarasinghe, and Dzung Viet Dao. 2022. "Formation Techniques Used in Shape-Forming Microrobotic Systems with Multiple Microrobots: A Review" Micromachines 13, no. 11: 1987. https://doi.org/10.3390/mi13111987