1. Introduction
Grip force is an index that is based on the measurement of the pressure applied by a person’s hand on a given surface or handhold. Accumulated anecdotal evidence indicates the occurrence of ‘white finger syndrome’ among combat pilots, which describes their tendency to hold the aircraft’s steering handle very tightly during highly stressful situations, to the extent that blood is drained from the fingers, leaving the fingers pale. These reports laid the foundation for the research on grip force as a measure of stress [
1].
Stress is a concept that has many definitions. Among these conceptualizations, there are two prominent models. The first is focused on the response to a threatening stimulus and is known as the ‘Fight-or-Flight’ response, which is the first stage of the general adaptation syndrome that regulates stress responses [
2]. The second conception is cognitive and is referred to as the transactional model [
3]. According to this model, stress occurs when there is a gap between one’s perception of his/her abilities and the perceived requirements of a given situation, provided that there are perceived consequences for that individual.
From the perspective of the central nervous system, stress is perceived and processed in various brain structures, including lower ones, such as the amygdala and the hypothalamus, and higher ones, such as the prefrontal cortex. The lower brain structures are characterized by a faster processing rate than the higher brain structures [
4].
Stress during driving may cause a high mental workload [
5] and lead to adverse effects [
6] that, in turn, may decrease driver performance [
7,
8]. Therefore, the monitoring of drivers’ stress has the potential to improve drivers’ performance and safety through stress-targeted interventions, such as stress-adaptive car systems that modify the parameters of in-vehicle driver-aiding systems (DAS) [
9]. A similar method was recently revealed to be efficient in improving psychomotor training through the use of adaptive automation capabilities combined with near-real-time stress measurement based on grip force [
10].
Many physiological indices of stress have disadvantages, such as high measurement latency and intrusiveness [
11]. However, grip force is an innovative index of stress that is unaffected by these drawbacks. Previous work on grip force as an index of stress was conducted by Wagner et al. [
1] and Botzer et al. [
12], who compared levels of grip force in tracking tasks with and without stress on the group as well as at the individual level. Additionally, Sahar et al. [
11] measured grip force during driving and the performance of a braking task at various levels of intensity. The lessons learned from these studies indicate that grip force can be used to distinguish between states with and without stress [
1], that a five-second time window of grip force data is sufficient for the detection of stress [
12], and that stress can be detected through the steering wheel during driving using a two-second time window of grip force [
11].
Nonetheless, these studies have several limitations. First, there are possible inertial effects (due to the braking events) on grip force that may occur instead of or in addition to the stress’s effect [
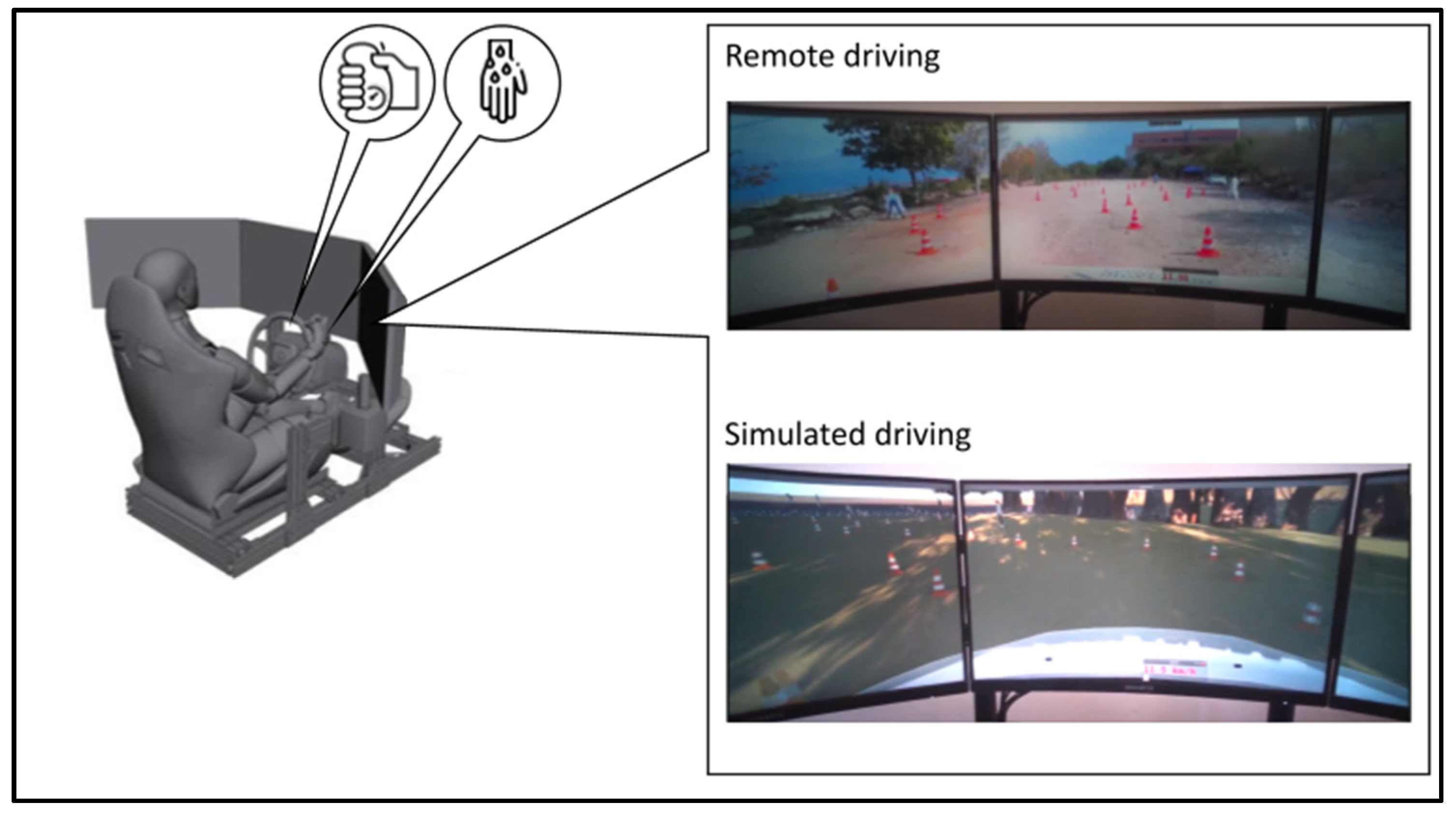
11]. One way to avoid inertial effects on the driver’s grip force is to have the participant perform a driving task in a completely stationary environment (e.g., by driving a remotely controlled vehicle or a simulation). Another method used to isolate different effects on grip force is to increase the resolution of its measurement, so that the grip force that is closely correlated with an irrelevant factor, such as inertia during a car braking event, can be disregarded.
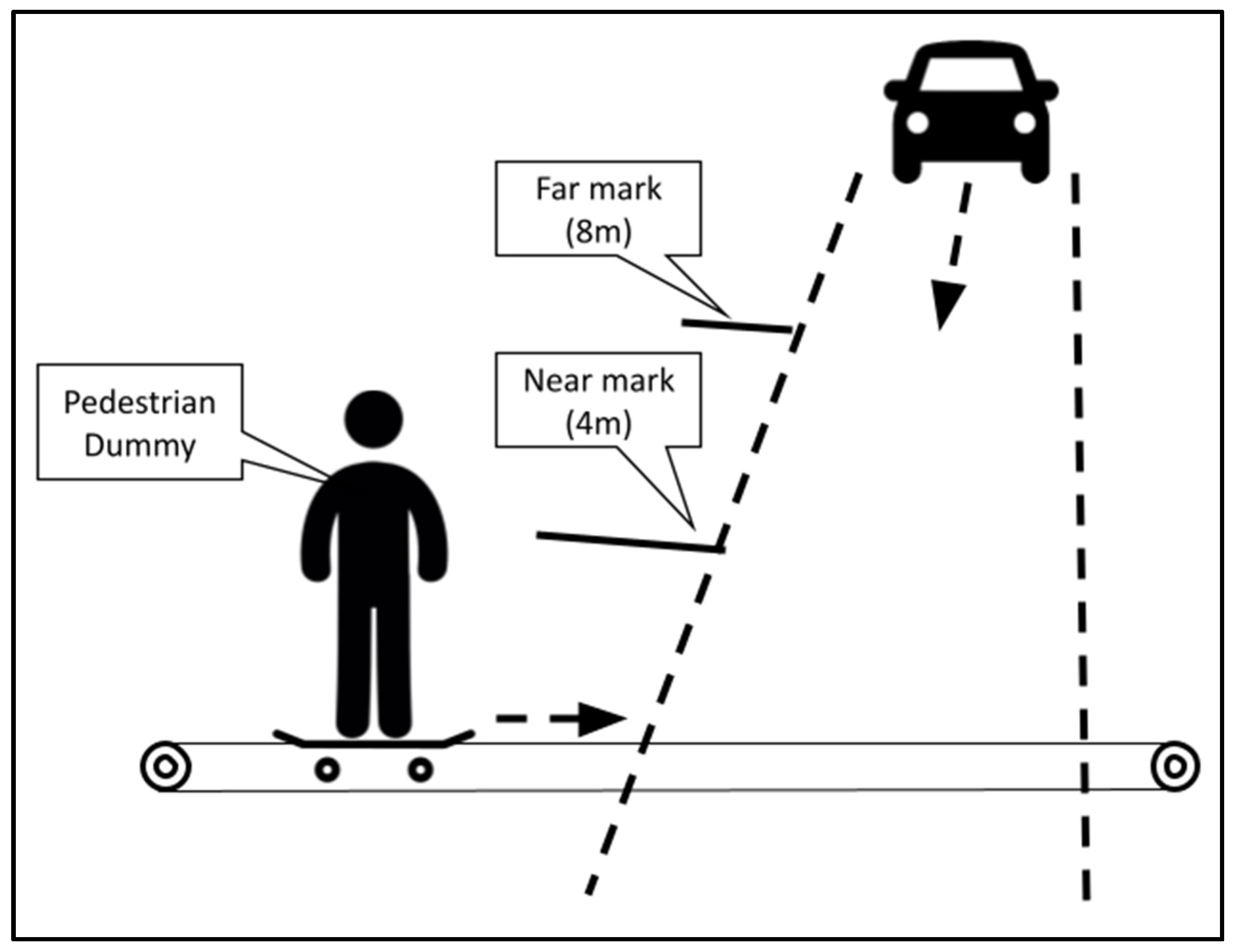
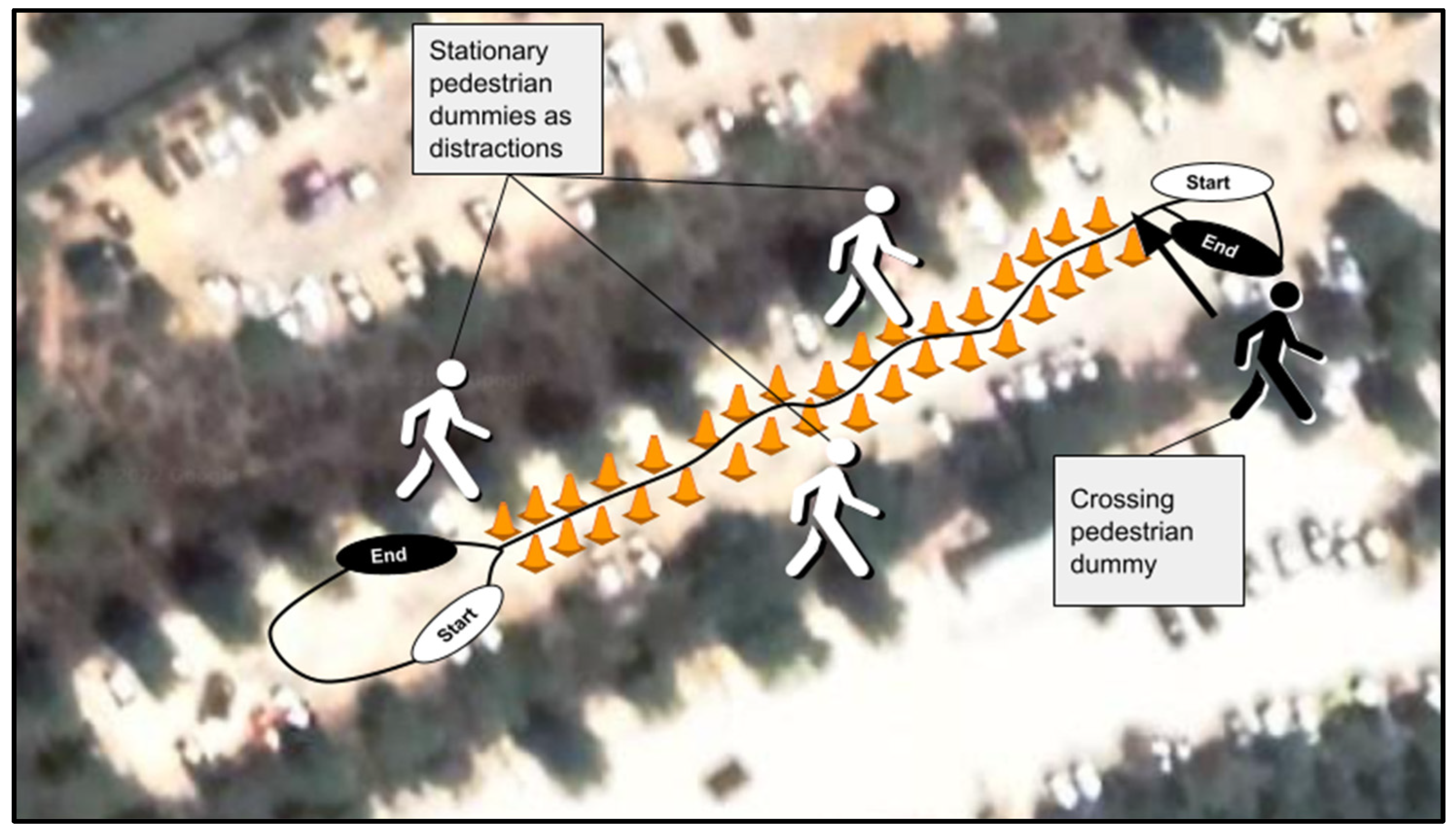
A second limitation is that the manipulations might induce other states rather than stress, such as a mere workload state. One example of a driving-related stressor is a pedestrian crossing the road quickly and without warning at various distances from the vehicle. Such a manipulation was previously found to cause stress in driving simulator settings [
13,
14]. Furthermore, compared to simulator driving, the performance of the same driving task in a real vehicle was found to elicit stress [
15]. Thus, comparing the same driving task in both driving modes (simulated or on-road) may be used as another two-level stress manipulation. However, this stressor remains throughout the driving task, unlike the crossing pedestrian manipulation, which occurs for a shorter period during the driving task.
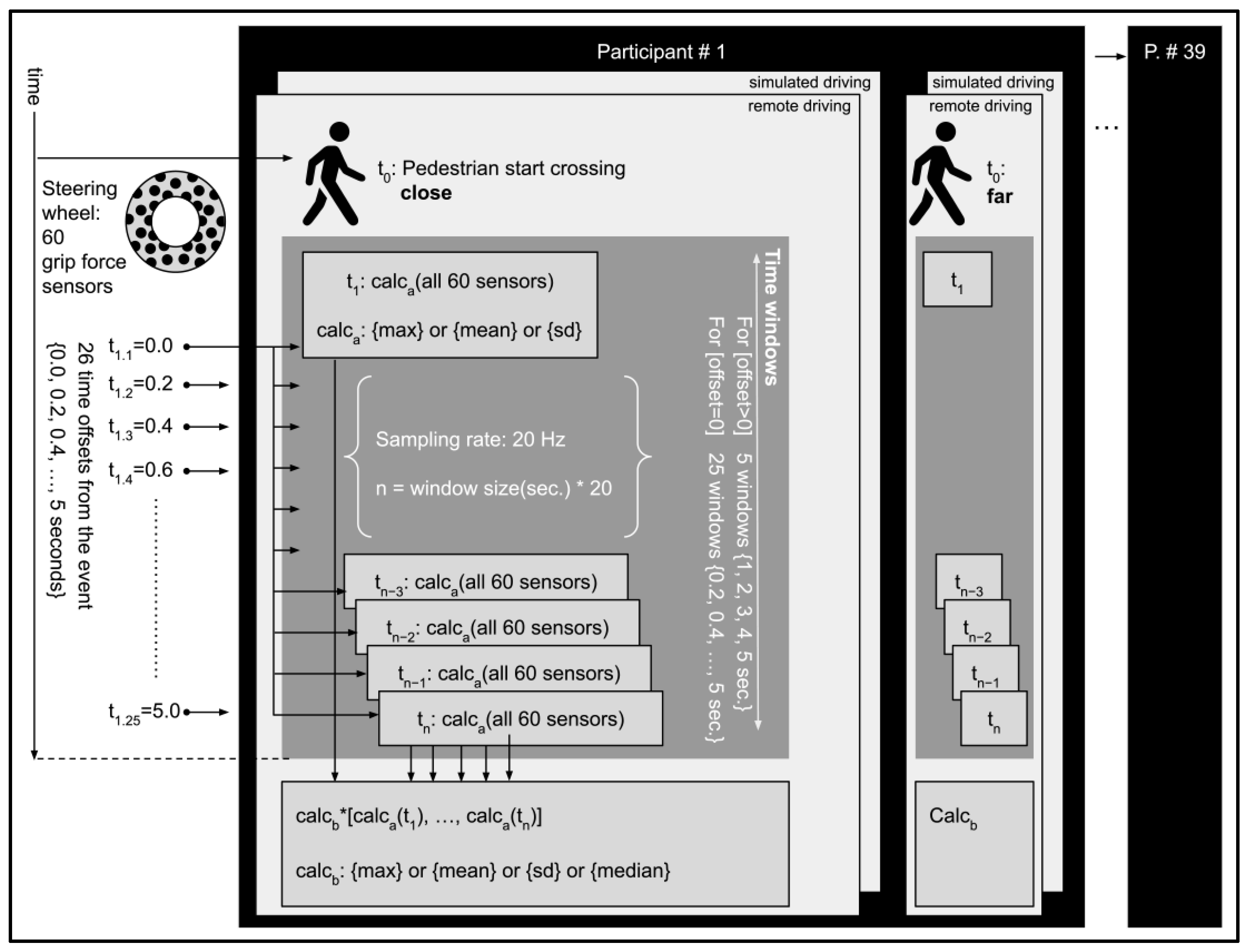
Another limitation lies in the fact that only a limited variety of mathematical operations and statistical methods have been explored regarding grip force. The quantification of this relatively new measure may include more efficient preprocessing and statistical methods, depending on the characteristics of the stressor and the task at hand. From similar studies that explored physiological measures of stress, it appears that the main parameters used for characterizing the state of stress according to raw data over time are the size of the time window (hereafter, ‘Time window’), the offset of the time window from the stressful event (hereafter, ‘Offset’), and the mathematical operation performed on the raw data (hereafter, ‘Calculation’) [
16]. Specifically, in the measurement of stress according to grip force data, the handhold surface that the grip force acts upon is affected by stress (hereafter, ‘Surface’) is also an important characteristic of this index.
The current research aimed to address the abovementioned limitations by isolating the different effects on grip force using completely stationary driving tasks; that is, driving in a simulator and controlling a remote vehicle. In addition, by utilizing sizable stimuli, another aim of this study was to explore various parameters in the calculation of grip force. This will enable the formulation of models describing the relationship between grip force and stress. Our hypothesis is that grip force, measured through the steering wheel, can be used to distinguish between two levels of stress during driving. Specifically, we hypothesized that:
H1. Grip force calculations for a pedestrian crossing event will be higher for a closer crossing distance compared with a further crossing distance of the pedestrian.
H2. Grip force calculations for a pedestrian crossing event will be higher in a remote driving mode compared with a simulated driving mode.
3. Results
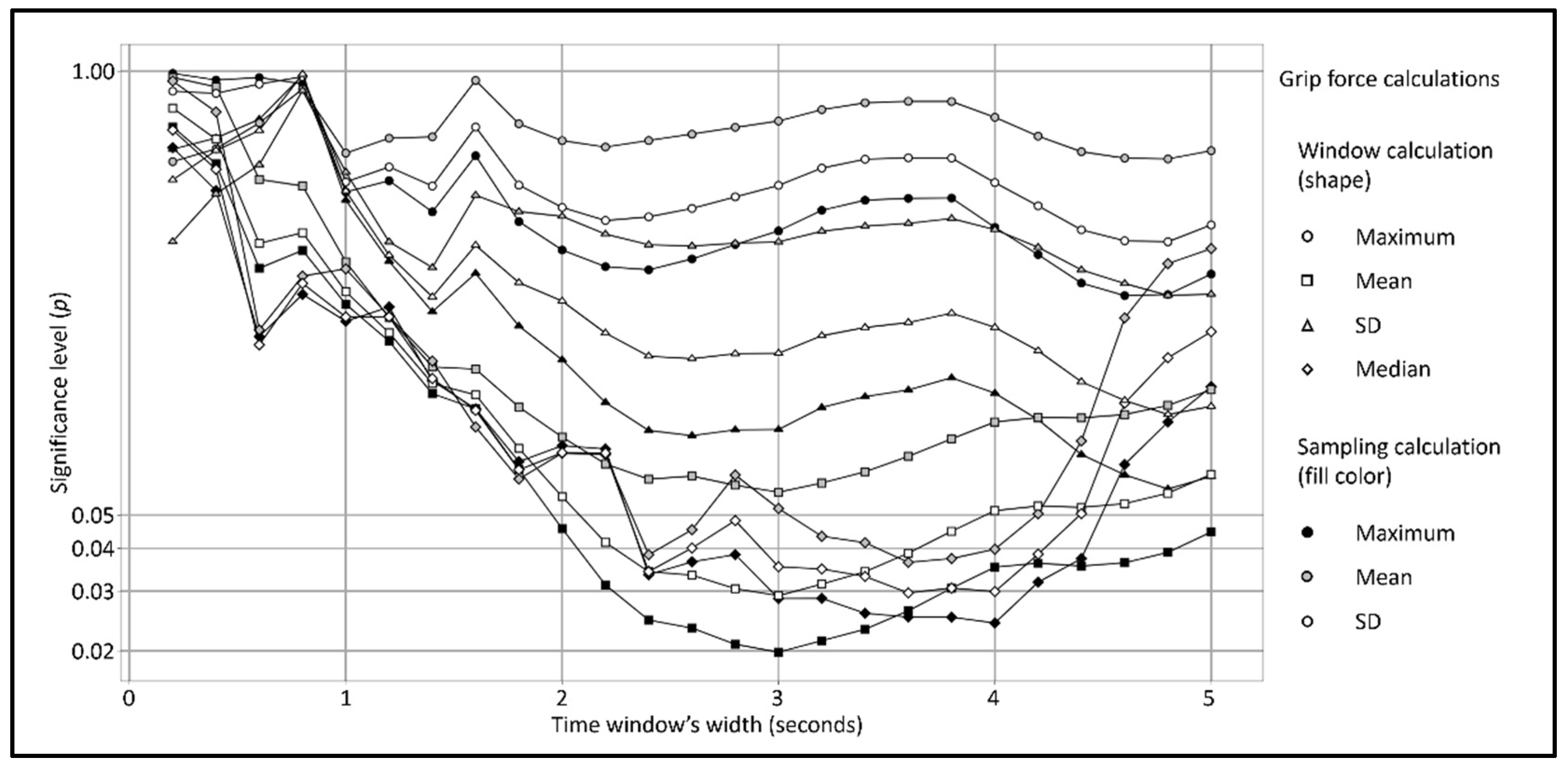
In order to examine the various combinations of calculations and time window parameters, multiple LMM analyses were conducted in accordance with the formula in Equation (1). For zero offset of the time window from the crossing even, and for the ‘Crossing distance’ stressor, 300 combinations were explored: 4 (window calculations) × 3 (single sampling of all 60 sensors) × 25 (time windows). Of these analyses, 53 were significant (
p < 0.05), as can be seen in
Figure 8. The smallest time window width that was significant was 2 s, based on a window ‘Mean’ calculation and sampling ‘Maximum’ calculation. A significant main effect of the ‘close’ crossing distance condition on the grip force was identified, t
(108) = −2.021,
p = 0.046, with an explained variation of R
2 = 0.276 and effect size of Cohen’s D = 0.387. A pattern can be determined from the graph in
Figure 8, indicating that the analyses of the time window width, ranging from 2 to 5 s, were significant, with peak significance for the 3 s time window width. It should be noted that larger time window widths may have yielded significant models. However, this research was focused on a range of widths between zero and five seconds, based on previous work [
11,
12].
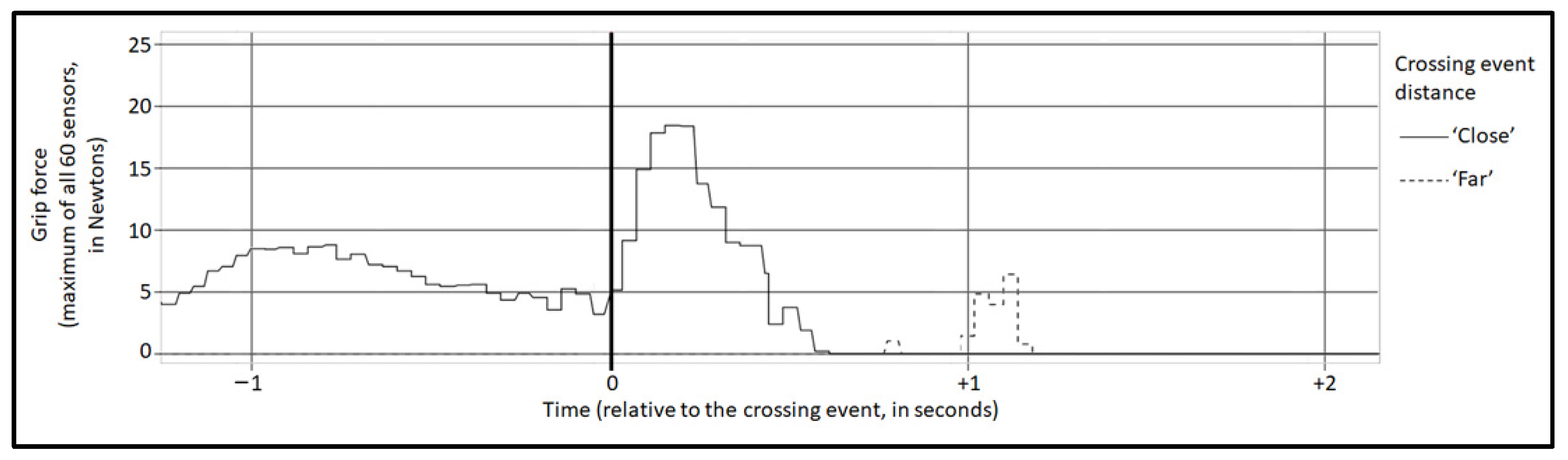
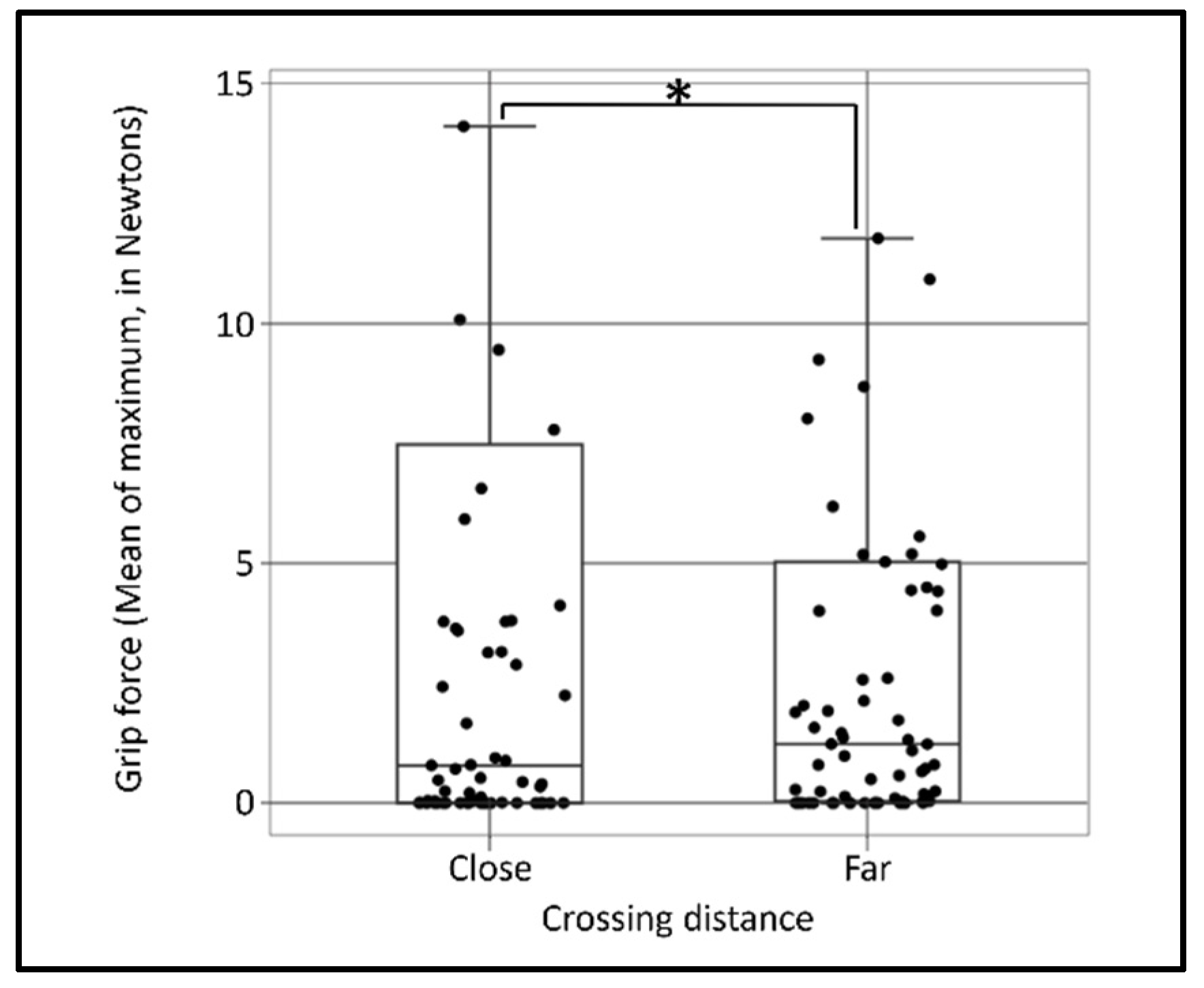
For the zero offset, the most significant combination of parameters was the 3 s-width time window, based on a window ‘Mean’ calculation and sampling ‘Maximum’ calculation. A significant main effect of the ‘close’ crossing distance condition on the grip force was identified, t
(108) = −2.364,
p = 0.019, with an explained variation of R
2 = 0.368 and effect size of Cohen’s D = 0.453, which indicates that the close crossing distance caused greater grip force, as can be seen in
Figure 9.
From the investigation of all offsets of the time window and all possible combinations of all the other parameters, as mentioned earlier (i.e., all calculation types, time window widths, and stressors), it was found that various parameter combinations yielded significant results.
Table 1 includes a summary of all the significant models according to their parameters. These models in
Table 1 are characterized by a higher statistical strength compared to the others. For the stressor ‘Crossing distance’, the strongest of these models is that based on the ‘Mean’ of the window and ‘Maximum’ of the sampling, with a 2 s-width time window and an offset of between 1.8 and 4.2 s, which has an explained variation of R
2 between 0.41 and 0.82 and an effect size of Cohen’s D between 1.041 and 1.509. For the stressor ‘Driving mode’, there are three combinations of calculations that are significant, including the ‘Median’ of the window with the ‘Maximum’ of the sampling, the ‘Median’ of the window with the ‘Standard deviation’ of the sampling, and the ‘Median’ of the window with the ‘Mean’ of the sampling. The widths of the time window are between 4.2 and 5 s for all three combinations, all with zero offset. The explained variation for these models is indicated by an R
2 between 0.24 and 0.27 and an effect size of Cohen’s D between 0.408 and 0.467.
The aggregation of the parameters of these models indicates that, for the ‘Crossing distance’ stressor, there are various relevant time window widths, with the statistically strongest effects observed for the smaller widths. On the other hand, for the ‘Driving mode’ stressor, most of the time window widths fall at the higher end of the inspected range (i.e., 4.2–5 s).
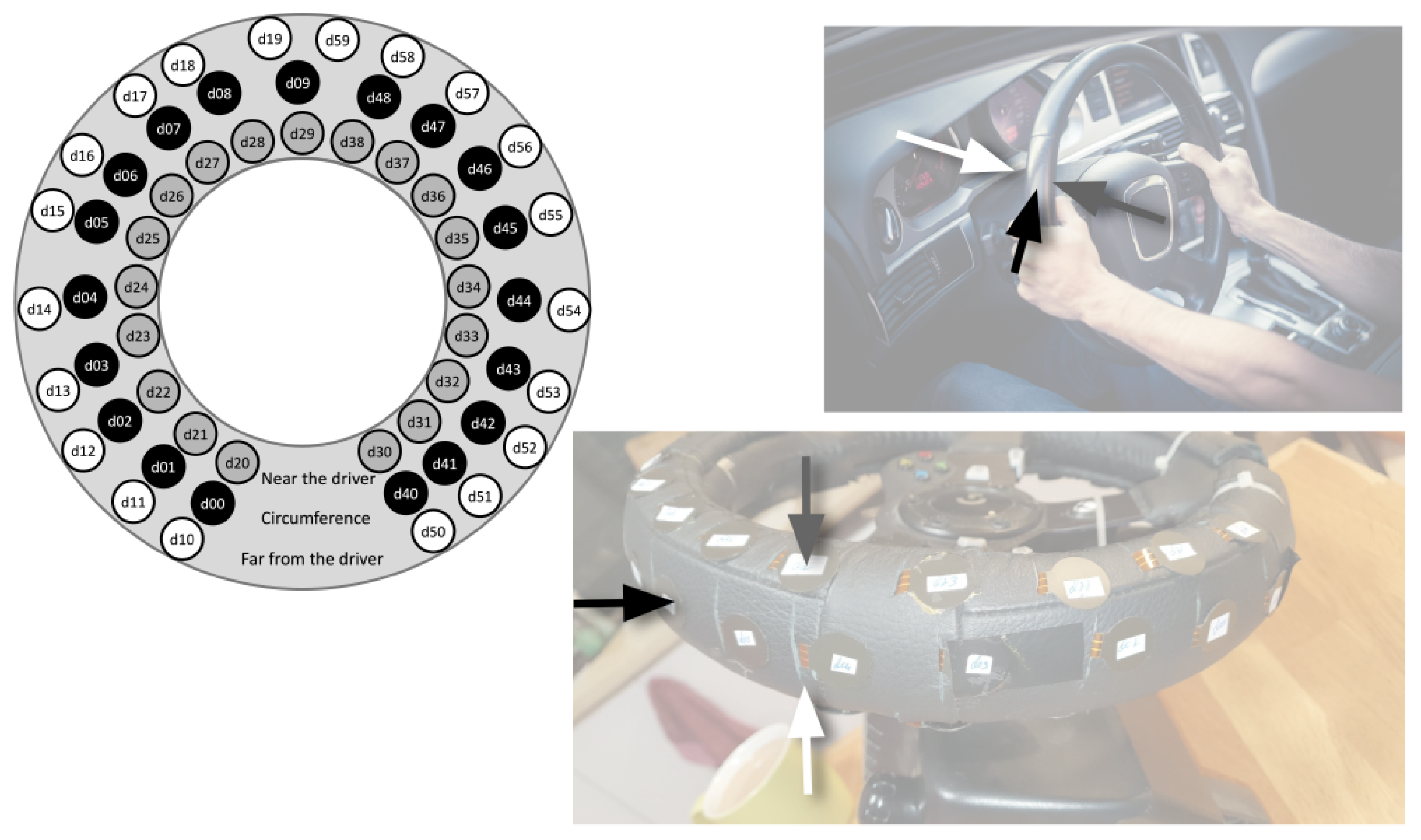
The inspection of grip force on the different surfaces of the steering wheel included, in addition to this parameter, its combination with all the previous ones (i.e., all calculation types, time window widths, and offsets, as well as stressors). Of the possible combinations of parameters, significant models were observed for the ‘Driving mode’ alone (i.e., ‘Remote driving’ versus ‘Simulated driving’), with no effects of the time window width and with zero offset alone.
Table 2 includes the parameters of these models. Observing these results, different directions of the stressor effect on the grip force combination of calculations interacting with the surface of the steering wheel are apparent. For the far surface of the steering wheel, the grip force is increased in the ‘Remote driving’ mode compared with the ‘simulated driving’ mode, while for the surface of the steering wheel that is near to the driver, it is lower. The explained variation for these models is indicated by an R
2 between 0.52 and 0.60 and an effect size of Cohen’s D between 0.426 and 0.470.
Each participant performed the driving task (in both modes) four times, in which the incident of the pedestrian crossing the lane occurred each time. In order to examine the effect of the first occurrence of the crossing event itself on the grip force, LMM analyses were conducted for all the grip force calculation combinations, as previously described, as well as all the time window parameters (widths and offsets), as a factor of the crossing event order (the first against the last of the three crossing events), in accordance with the formula in Equation (2). All analyses were non-significant.
To inspect possible effects of participants’ background characteristics (i.e., gender, age, and years of driving experience) on the grip force, LMM analyses were conducted with the participant as the random effect, including interactions between these parameters. None of these analyses were significant. Additionally, all the interactions were examined (i.e., all combinations of the crossing distance, driving mode, crossing order, and background characteristics); however, none of these analyses were significant.
4. Discussion
We explored multiple models to describe the relationship between grip force and stressful events or states in order to locate the mathematical and statistical models most suitable for the measurement of stress according to the grip force. Our findings (see
Table 1 and
Table 2) showed that there are several significant models, some of which have a high statistical power, compared with other physiological indices of stress, such as cortisol levels [
19] and heart rate measures [
20]. These findings suggest that grip force on the steering wheel is a suitable measurement method for use as a stress index for driving tasks, in accordance with our previous findings [
11]. Furthermore, since the two distances used for the ‘Crossing distance’ stressor were relatively close to one another [
17], it can be concluded that grip force, as a stress index, is suitable for distinguishing between relatively close levels of stress.
Of the two stressor manipulations that were used, the ‘Crossing distance’ stressor was found to be significant, with a higher statistical power in the narrower time windows, while the ‘Driving mode’ stressor was significant in the case of the wider time windows (see
Table 1). These two stressors can be distinguished in terms of their duration. That is, the ‘Driving mode’ stressor was characterized by a relatively long duration in this experiment; overall, the situation lasted for a number of minutes. On the other hand, the ‘Crossing distance’ stressor was characterized by a noticeably short duration, i.e., a few seconds. These different time periods of stressor events correspond with the time window widths observed in the models, a fact that strengthens these findings. In addition, the definitions of stress are also reflected in these time period differences. The transactional model of stress involves cognitive processes [
3], which are carried out in the prefrontal cortex [
21]. On the other hand, the ‘Fight-or-Flight’ stress response takes place in the sub-cortical brain structures (i.e., the amygdala and the hypothalamus), which are characterized by a faster processing speed than the cortical structures [
21]. Therefore, it can be argued that short-term stressors, such as the ‘Crossing distance’, invoke the ‘Fight-or-Flight’ response, which, in turn, is reflected in certain grip force models, while states that induce long-lasting stress, such as the ‘Driving mode’ stressor, initiate the transactional model assessment processes, which, in turn, are reflected in other distinct grip force models.
Another finding that can aid in the appropriate choice of parameters in the study of grip force through stress measurements in driving scenarios is reflected in
Table 2. According to these findings, the steering wheel surfaces reflect a reverse grip force reaction according to the given model. Models with the ‘Mean’ calculation of the time window showed an increase in the grip force in the stressful condition, while models with the ‘Maximum’ calculation of the time window showed a decrease under this condition. It should be noted that these models were independent of the width of the time window. This lack of effect of the time window width may be explained by the lasting effect of the relevant stressor (i.e., ‘Driving mode’), which remained the same throughout the driving task. In addition, since the various steering wheel surfaces were not significant in influencing the models of the effect of the ‘Crossing distance’ on grip force, a possible conclusion is that short-term stressors may not be expressed in the grip force using specific steering wheel surfaces.
The lack of evidence for the effect of the order of the crossing event on the grip force, although we cannot rule out this possibility entirely, nevertheless suggests the weakness of this effect. The argument that the first occurrence of the crossing event evoked higher levels of stress than the latter three crossing events, beyond the two levels of this manipulation (i.e., the ‘Close’ and the ‘Far’ conditions), is not supported. Thus, at the very least, the findings regarding the ‘Crossing distance’ manipulation effect on the grip force are neither contradicted nor refuted.
Our findings were independent of the possible effects of interpersonal background characteristics, such as age, gender, and driving experience. Therefore, potential alternative explanations of our results in such terms are not supported. Additionally, none of the possible interactions between these background parameters and the model parameters (i.e., the window and calculation options) were significant. Thus, the effects that we identified were independent of mutual influence, i.e., the effect of the ‘Driving mode’ on the grip force was beyond the distinct levels of the ‘Crossing distance’ stressor, and vice versa.
There are several limitations to the current study. First, the characteristics of the participants in the sample were relatively homogenous; that is, all the participants were students at the same institute. It is possible that other populations would yield different patterns. Future studies may benefit from examining the models explore here with other populations or, alternatively, with more heterogenic samples.
A second restraint was the reuse of a single dataset in the current study. The purpose of this research was the exploration of various mathematical and statistical models of the relationship between levels of stressors and grip force. In order to enable the comparison of the assorted models with multiple combinations of parameters, the same data were employed. However, this reuse of data may have skewed the results according to specific attributes of the current data. Researchers are encouraged to examine the validity of these models with different datasets. Should the current results be replicated, their validity would be reconfirmed.
A third limitation concerns the accuracy and validity of the results of this study. Since the explained variable in our models was grip force, a physiological index of stress, its accuracy should be verified according to a gold standard used in this field, such as cortisol or electroencephalogram (EEG) indices. Although grip force was validated here according to EDA, researchers are encouraged to use other indices in future studies so as to further examine this issue.
A fourth limitation stems from the physical setting of the operation station used here. In order to isolate the measurement of grip force and avoid external influences such as the effect of acceleration on the driver’s body, which, in turn, would be expressed in the grip force, we used a stationary operation position for the driver in both the simulated driving mode and remote driving. Nonetheless, the results reported here are restricted to immobile environments and should not be generalized to mobile settings, such as a driver in a moving vehicle or naturalistic driving. Future studies could verify these results by reproducing this experiment in mobile settings.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}