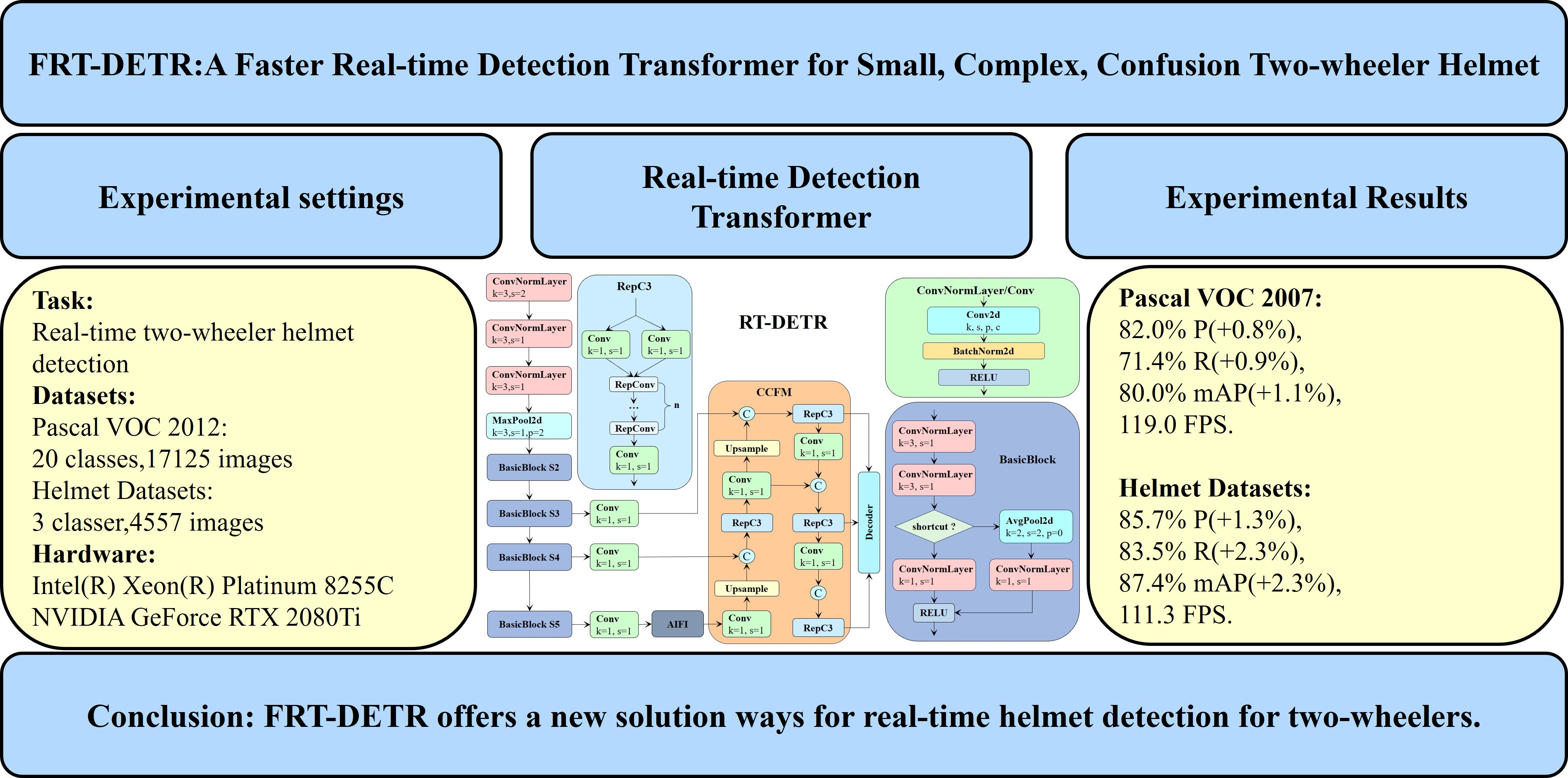
The field of helmet detection faces challenges due to small targets, complex backgrounds, and confusion with neighbouring objects. This paper proposes a faster real-time two-wheeler helmet detection model based on the real-time detection transformer (RT-DETR) to address these issues. FRT-DETR includes a new FasterRNet structure designed using model re-parameterisation technique to improve detection performance while meeting real-time requirements for practical applications. Secondly, the proposal introduces a mixed global attention (MGA) module to address the issue of object confusion with neighbouring objects. The module combines channel and spatial information, as well as local and global information, resulting in a significant improvement in network performance. A new module called the cross-stage partial parallel atrous convolution (CSPPAC) is proposed to increase the receptive field. This is achieved by using convolutions with different atrous rates to capture multi-scale information and enhance feature representation. Additionally, the detection performance for small-sized helmet objects is improved through the use of a new channel-gated up-sample and down-sample to strengthen meaningful features and suppress redundant and irrelevant features. The experimental results indicate that FRT-DETR enhances the mean average precision (mAP) by 2.3% and increases the inference speed to 111.3 frames per second (FPS). These improvements significantly enhances the model's capability in detecting small objects and dense scenes, meeting the real-time requirement while ensuring detection accuracy. Therefore, it provides an effective solution for real-time detection of two-wheeler helmets.
{kind=link}