
Abstract
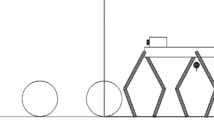
A method is presented for overcoming an obstacle by an insectomorphic robot in the form of a stack of three rough cylinders of different radii, two of which lie on a horizontal plane, and the third cylinder lies on top of these two. The cylinders are affected by gravity, dry friction, and rolling friction. The equilibrium conditions for the system under the action of an external force arising from the robot’s support on the system of cylinders are found. With the involvement of computer simulation tools, an algorithm for overcoming a stack that does not destroy the structure of the obstacle is developed. The results of the numerical experiments are presented.





















Similar content being viewed by others

REFERENCES
Yu. F. Golubev and V. V. Koryanov, Extreme Locomotion Capabilities of Insectomorphic Robots (IPM im. M. V. Keldysha, Moscow, 2018) [in Russian]. https://doi.org/10.20948/mono-2018-golubev
Blockage. https://ru.wikipedia.org/wiki/Zaval. Accessed March 09, 2020.
N. V. Syrykh and V. G. Chashchukhin, “Wall-climbing robots with permanent-magnet contact devices: Design and control concept of the contact devices,” J. Comput. Syst. Sci. Int. 58, 818 (2019). https://doi.org/10.1134/S1064230719050137
V. G. Gradetskii, M. M. Knyaz’kov, L. N. Kravchuk, A. A. Kryukova, E. A. Semenov, A. N. Sukhanov, and V. G. Chashchukhin, “Vacuum control in the surface attaching devices of the mobile robots during their movement under the aerodynamic attachment force,” Mekhatron., Avtomatiz., Upravl. 18, 447–452 (2017). https://doi.org/10.17587/mau.18.447-452
D. Longo and G. Muscato, “Adhesion techniques for climbing robots: State of the art and experimental considerations,” in Proceedings of the 11th International Conference CLAWAR-2008, Coimbra, Portugal (World Scientific, 2008), pp. 6–28.
Yu. F. Golubev and V. V. Koryanov, “An insectomorphic robot overcoming obstructions formed by isolated cylinders,” J. Comput. Syst. Sci. Int. 60, 333 (2021). https://doi.org/10.1134/S1064230721020052
Yu. I. Neimark and N. A. Fufaev, Dynamics of Nonholonomic Systems, Vol. 33 of Translations of Mathematical Monographs (Nauka, Moscow, 1967; Am. Math. Soc., Providence, RI, 2004).
P. J. Rabier and W. C. Rheinboldt, Nonholonomic Motion of Rigid Mechanical Systems from a DAE Viewpoint (Soc. Ind. Appl. Math., Philadelphia, 2000).
A. S. Kuleshov and V. V. Rybin, “Controllability of the Ishlinsky system,” Vestn. SPb. Univ., Ser. 1: Mat. Mekh. Astron. 1 (2), 98–103 (2014).
Universal Mechanism. Modeling the Dynamics of Mechanical Systems. http://www.umlab. ru. Accessed March 10, 2020.
Yu. F. Golubev and V. V. Koryanov, “Overcoming a stack of rough cylinders by a six-legged robot,” KIAM Preprint No. 55 (Keldysh Inst. Appl. Math., Moscow, 2021). https://doi.org/10.20948/prepr-2021-55
D. E. Okhotsimskii and Yu. F. Golubev, Mechanics and Control of Motion of an Automatic Walking Machine (Nauka Fizmatlit, Moscow, 1984) [in Russian].
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
The authors declare that they have no conflicts of interest.
Rights and permissions
About this article

Cite this article
Golubev, Y.F., Koryanov, V.V. Overcoming Obstacles in the Form of a Stack of Rough Cylinders by an Insectomorphic Robot. J. Comput. Syst. Sci. Int. 61, 253–269 (2022). https://doi.org/10.1134/S1064230722020083
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1064230722020083