




Abstract
We revisit the relativistic restricted two-body problem with spin employing a perturbation scheme based on Lie series. Starting from a post-Newtonian expansion of the field equations, we develop a first-order secular theory that reproduces well-known relativistic effects such as the precession of the pericentre and the Lense–Thirring and geodetic effects. Additionally, our theory takes into full account the complex interplay between the various relativistic effects, and provides a new explicit solution of the averaged equations of motion in terms of elliptic functions. Our analysis reveals the presence of particular configurations for which non-periodical behaviour can arise. The application of our results to real astrodynamical systems (such as Mercury-like and pulsar planets) highlights the contribution of relativistic effects to the long-term evolution of the spin and orbit of the secondary body.
1 INTRODUCTION
The General Theory of Relativity (GR) has been one of the greatest achievements of the 20th century. Its formulation has revolutionized our way to understand the physical Universe and has led to the (sometimes unexpected) opening of entirely new research fields. One striking example is the formulation of a consistent theory describing the global behaviour of the Universe, which was impossible in the framework of Newtonian mechanics (Peebles 1993).
In Einstein's theory, the space–time is thought of as a four-dimensional pseudo-Riemannian manifold whose geometry interacts non-linearly with matter. Because of this feature, general calculations in GR require much more work than the corresponding ones in Newtonian gravity and this fact has made more difficult the understanding of the physics of Einsteinian gravity.
Another consequence of this difficulty falls in the context of testing Einstein's gravity: our inability to solve in general the gravitational field equations limits the possibility of devising full tests of GR. Instead, most of the investigation on the validity of this theory was performed in a regime of weak field leaving the strong-field regime almost completely unexplored.1 In fact, all the tests of GR performed up to now belong to the class of weak-field experiments, from the so-called ‘classical tests’ of GR (Peebles 1993) to the latest tests based, for example, on the motion of interplanetary probes (Hees et al. 2011).
Einstein himself was well aware of the fact that the understanding of his theory in the perturbative regime was crucial for its testing and its application to the problems in which Newtonian gravity was most successful. For this reason in the 1930s he developed a perturbative approach able to describe the subtle changes induced on the Newtonian evolution of the bodies in the Solar system by General Relativity. The so-called Einstein–Infeld–Hoffman equations are the results at the first post-Newtonian level of this attempt (Einstein, Infeld & Hoffmann 1938).2 The derivation of these equations was the birth of a new field called ‘Relativistic Celestial Mechanics’ (RCM; Brumberg 1991; Kopeikin, Efroimsky & Kaplan 2011).
The research in RCM has not stopped since then. The post-Newtonian equations have been analysed in many different ways and new and more powerful approaches to RCM have been proposed (see Damour, Soffel & Xu 1991a,b, 1993, 1994). In spite of these advances, the resolution of the post-Newtonian equations still remains a formidable task. In particular, the interaction between orbital and rotational motion has not been fully solved analytically to this date.
In this paper, we will focus on the post-Newtonian equations for a restricted two-spinning-body system at the 1PN level. Our target is to obtain a complete description of the leading correction of GR on Newtonian mechanics with a specific focus on the spin interaction effects. Such a target will be accomplished using modern perturbative methods based on Lie series (Hori 1966; Deprit 1969). This approach allows us to derive a fully analytical description of the long-term dynamical evolution of the system using semi-automatized computer algebra. Advantages of the Lie series procedure over traditional perturbation techniques include the availability of explicit formulae to convert between the averaged and non-averaged orbital elements, and the possibility to straightforwardly extend the treatment to higher post-Newtonian orders. Using the Lie series technique, we will re-derive the standard precession effects typical of the restricted two-body problem in General Relativity, but we will also give new analytical relations describing the evolution of spin and orbital angular momentum of the secondary body. In fact, we will be able to explore the full evolution of the orbital parameters of the secondary body and to quantify the effect of the spin–orbit and spin–spin interactions.
The use of the Lie series technique in RCM is relatively sparse, and, as far as we have been able to verify, it constitutes by itself a novelty in the analysis of relativistic spin–spin and spin–orbit interactions.3 In this first paper of the series, we have thus chosen to focus on the restricted problem in order to lay the foundation of our method in the simplest case of interest. In subsequent publications, we will tackle the full post-Newtonian two-body problem with spin building on the formalism introduced in this paper.
2 HAMILTONIAN FORMULATION
In the present formulation of the Hamiltonian, we have dropped from |$\mathcal {H}_{{\rm SS}}$| the spin-quadratic contributions due to monopole–quadrupole interaction4 to focus on the leading relativistic effects. Besides, as pointed out by Damour (2001), at this PN order we can expect to obtain physically reliable results in the case of moderate spins and orbital velocities.
The equations of motion generated by equation (1) can be obtained via the familiar Hamiltonian canonical equations. The orbital momenta and coordinates are represented, respectively, by |$\boldsymbol {p}$| and |$\boldsymbol {r}$|; the spin coordinates and momenta are represented by the Euler angles and their conjugate generalized momenta in terms of which the components of the angular velocities |$\boldsymbol {\omega }_i$| are expressed. At this stage, we are not concerned with the exact functional form of such dependence, as we will introduce a more convenient set of variables in Section 3. We refer to Gurfil et al. (2007) for a derivation of the Hamiltonian formulation of rigid-body dynamics.
3 ACTION-ANGLE VARIABLES
In preparation for the application of the Lie series perturbative approach in the study of Hamiltonian (8), we want to express the Hamiltonian in a coordinate system of action-angle variables (Arnold 1989) for the unperturbed problem. For the orbital variables, a common choice is the set of Delaunay elements (Morbidelli 2002). For the rotational motion, a suitable choice in our case is that of Serret–Andoyer (SA) variables (Gurfil et al. 2007). Both sets of variables are introduced formally as canonical transformations.
Before proceeding, we need to discuss briefly the nature of the canonical momenta appearing in Hamiltonian (8). Post-Newtonian Hamiltonians are derived from Lagrangians in which the generalized velocities appear not only in the kinetic terms of the Newtonian portion of the Lagrangian, but also in the relativistic perturbation (see e.g. Landau & Lifschits 1975; Straumann 1984). As a consequence, after switching to the Hamiltonian formulation via the usual Legendre transformation procedure, the post-Newtonian canonical Hamiltonian momenta will differ from the Newtonian ones by terms of order 1/c2. This discrepancy will carry over to any subsequent canonical transformation, including the introduction of Delaunay and SA elements. Richardson & Kelly (1988) and Heimberger et al. (1990) analyse in detail the connection between Newtonian and post-Newtonian Delaunay orbital elements.
However, in this work, we are concerned with the secular variations of orbital and rotational elements, for which the discrepancy discussed above is of little consequence. For if a secular motion (e.g. a precession of the node) results from our analysis in terms of post-Newtonian elements, it will affect within an accuracy of 1/c2 also the Newtonian elements.5 Indeed, we will show how our analysis in terms of post-Newtonian elements reproduces exactly the formulae of known secular relativistic effects.
3.1 Delaunay elements
3.2 Serret–Andoyer variables
The SA variables describe the rotational motion of a rigid body in terms of orientation angles and rotational angular momenta. In our specific case, the bodies are perfectly spherical and thus the introduction of SA elements is simplified with respect to the general case. We refer to Gurfil et al. (2007) for an exhaustive treatment of the SA formalism in the general case.
3.3 Final form of the Hamiltonian
| Symbol | Meaning | Alternative expression |
|---|---|---|
| L | Normalized square root of the semi-major axis | |$\sqrt{\mathcal {G}m_{2}a}$| |
| G | Norm of the orbital angular momentum |$\boldsymbol {r}\times \boldsymbol {p}_1$| normalized by m1 | |$L\sqrt{1-e^2}$| |
| H | z-component of the orbital angular momentum normalized by m1 | G cos i |
| |$\tilde{G}$| | Norm of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\left|\boldsymbol {J}_1\right|/m_1$| |
| |$\tilde{H}$| | z-component of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\tilde{G}\cos {I}$| |
| l | Mean anomaly | M |
| g | Argument of pericentre | ω |
| h | Longitude of the ascending node | Ω |
| |$\tilde{h}$| | Nodal angle of spin |$\boldsymbol {J}_1$| | – |
| f | True anomaly | – |
| |$\mathcal {I}_1$| | Inverse of the moment of inertia of body 1 normalized by m1 | m1/I1 |
| Gxy | Norm of the projection of |$\boldsymbol {r}\times \boldsymbol {p}_1$| on the xy-plane normalized by m1 | |$\sqrt{G^2-H^2}$| |
| |$\tilde{G}_{xy}$| | Norm of the projection of spin |$\boldsymbol {J}_1$| on the xy-plane normalized by m1 | |$\sqrt{\tilde{G}^2-\tilde{H}^2}$| |
| J2 | Norm of spin |$\boldsymbol {J}_2$| | |$\left|\boldsymbol {J}_2\right|$| |
| r | Distance between body 1 and body 2 | – |
| m1, m2 | Masses of the two bodies | – |
| |$\mathcal {G}$| | Universal gravitational constant | – |
| Symbol | Meaning | Alternative expression |
|---|---|---|
| L | Normalized square root of the semi-major axis | |$\sqrt{\mathcal {G}m_{2}a}$| |
| G | Norm of the orbital angular momentum |$\boldsymbol {r}\times \boldsymbol {p}_1$| normalized by m1 | |$L\sqrt{1-e^2}$| |
| H | z-component of the orbital angular momentum normalized by m1 | G cos i |
| |$\tilde{G}$| | Norm of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\left|\boldsymbol {J}_1\right|/m_1$| |
| |$\tilde{H}$| | z-component of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\tilde{G}\cos {I}$| |
| l | Mean anomaly | M |
| g | Argument of pericentre | ω |
| h | Longitude of the ascending node | Ω |
| |$\tilde{h}$| | Nodal angle of spin |$\boldsymbol {J}_1$| | – |
| f | True anomaly | – |
| |$\mathcal {I}_1$| | Inverse of the moment of inertia of body 1 normalized by m1 | m1/I1 |
| Gxy | Norm of the projection of |$\boldsymbol {r}\times \boldsymbol {p}_1$| on the xy-plane normalized by m1 | |$\sqrt{G^2-H^2}$| |
| |$\tilde{G}_{xy}$| | Norm of the projection of spin |$\boldsymbol {J}_1$| on the xy-plane normalized by m1 | |$\sqrt{\tilde{G}^2-\tilde{H}^2}$| |
| J2 | Norm of spin |$\boldsymbol {J}_2$| | |$\left|\boldsymbol {J}_2\right|$| |
| r | Distance between body 1 and body 2 | – |
| m1, m2 | Masses of the two bodies | – |
| |$\mathcal {G}$| | Universal gravitational constant | – |
| Symbol | Meaning | Alternative expression |
|---|---|---|
| L | Normalized square root of the semi-major axis | |$\sqrt{\mathcal {G}m_{2}a}$| |
| G | Norm of the orbital angular momentum |$\boldsymbol {r}\times \boldsymbol {p}_1$| normalized by m1 | |$L\sqrt{1-e^2}$| |
| H | z-component of the orbital angular momentum normalized by m1 | G cos i |
| |$\tilde{G}$| | Norm of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\left|\boldsymbol {J}_1\right|/m_1$| |
| |$\tilde{H}$| | z-component of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\tilde{G}\cos {I}$| |
| l | Mean anomaly | M |
| g | Argument of pericentre | ω |
| h | Longitude of the ascending node | Ω |
| |$\tilde{h}$| | Nodal angle of spin |$\boldsymbol {J}_1$| | – |
| f | True anomaly | – |
| |$\mathcal {I}_1$| | Inverse of the moment of inertia of body 1 normalized by m1 | m1/I1 |
| Gxy | Norm of the projection of |$\boldsymbol {r}\times \boldsymbol {p}_1$| on the xy-plane normalized by m1 | |$\sqrt{G^2-H^2}$| |
| |$\tilde{G}_{xy}$| | Norm of the projection of spin |$\boldsymbol {J}_1$| on the xy-plane normalized by m1 | |$\sqrt{\tilde{G}^2-\tilde{H}^2}$| |
| J2 | Norm of spin |$\boldsymbol {J}_2$| | |$\left|\boldsymbol {J}_2\right|$| |
| r | Distance between body 1 and body 2 | – |
| m1, m2 | Masses of the two bodies | – |
| |$\mathcal {G}$| | Universal gravitational constant | – |
| Symbol | Meaning | Alternative expression |
|---|---|---|
| L | Normalized square root of the semi-major axis | |$\sqrt{\mathcal {G}m_{2}a}$| |
| G | Norm of the orbital angular momentum |$\boldsymbol {r}\times \boldsymbol {p}_1$| normalized by m1 | |$L\sqrt{1-e^2}$| |
| H | z-component of the orbital angular momentum normalized by m1 | G cos i |
| |$\tilde{G}$| | Norm of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\left|\boldsymbol {J}_1\right|/m_1$| |
| |$\tilde{H}$| | z-component of spin |$\boldsymbol {J}_1$| normalized by m1 | |$\tilde{G}\cos {I}$| |
| l | Mean anomaly | M |
| g | Argument of pericentre | ω |
| h | Longitude of the ascending node | Ω |
| |$\tilde{h}$| | Nodal angle of spin |$\boldsymbol {J}_1$| | – |
| f | True anomaly | – |
| |$\mathcal {I}_1$| | Inverse of the moment of inertia of body 1 normalized by m1 | m1/I1 |
| Gxy | Norm of the projection of |$\boldsymbol {r}\times \boldsymbol {p}_1$| on the xy-plane normalized by m1 | |$\sqrt{G^2-H^2}$| |
| |$\tilde{G}_{xy}$| | Norm of the projection of spin |$\boldsymbol {J}_1$| on the xy-plane normalized by m1 | |$\sqrt{\tilde{G}^2-\tilde{H}^2}$| |
| J2 | Norm of spin |$\boldsymbol {J}_2$| | |$\left|\boldsymbol {J}_2\right|$| |
| r | Distance between body 1 and body 2 | – |
| m1, m2 | Masses of the two bodies | – |
| |$\mathcal {G}$| | Universal gravitational constant | – |
4 PERTURBATION THEORY VIA LIE SERIES
The integral in equation (23) essentially represents an averaging over the mean motion l. Consequently, the new momenta and coordinates generated by the Lie series transformation are the mean counterparts of the original momenta and coordinates.
Thanks to the functional form of Hamiltonians (13) and (14), the averaging procedure removes at the same time both l and g from the averaged Hamiltonian.
The integration is performed in closed form, that is, without resorting to Fourier–Taylor expansions in terms of mean anomaly and eccentricity (Deprit 1982; Palacián 2002). The results are thus valid also for highly eccentric orbits.
The computations involved in the averaging procedure have been carried out with the Piranha computer algebra system (Biscani 2008). As usual when operating with Lie series transformations, from now on we will refer to the mean momenta and coordinates |$\left(L^\prime ,G^\prime ,H^\prime ,\tilde{G}^\prime ,\tilde{H}^\prime \right)$| and |$\left(l^\prime ,g^\prime ,h^\prime ,\tilde{g}^\prime ,\tilde{h}^\prime \right)$| with their original names |$\left(L,G,H,\tilde{G},\tilde{H}\right)$| and |$\left(l,g,h,\tilde{g},\tilde{h}\right)$|, respectively, in order to simplify the notation.
5 ANALYSIS OF THE AVERAGED HAMILTONIAN
5.1 Preliminary considerations
We are now going to proceed to the derivation of the well-known relativistic effect in a series of simplified cases of Hamiltonian (27).
5.2 Einstein precession
5.3 Lense–Thirring effect
5.4 Geodetic effect
A first observation is that, since J2 = 0, there is no preferred orientation for the reference system, and the form of the equations of motion is rotationally invariant. As an immediate consequence, the fact that the mean momentum |$\tilde{H}_\ast =H+\tilde{H}$| is constant regardless of the orientation of the reference system implies that in this case the total mean angular momentum vector is a constant of motion (whereas in the general case only its z-component is conserved). In turn, this observation, together with the conservation of the norms of the mean orbital and rotational angular momenta G and |$\tilde{G}$|, respectively, implies that the only possible motion for the mean orbital and rotational angular momentum vectors is a simultaneous precession around the total mean angular momentum vector.
5.5 The general case
We turn now our attention to the general case in which both bodies are spinning. First, we will determine and characterize the equilibrium points of the system, then we will study the exact solution of the equation of motion for H.
5.5.1 Phase-space analysis
5.5.1.1 Equilibria with |$\mathcal {F}_{1}=0$|
Since G2 > 0 and |$\mathcal {J}_{2}>0$| by definition, H(e) must also be positive.
Since H ≤ G by definition (as H is the z-component of the mean specific orbital angular momentum, whose magnitude is G), the equilibrium can exist only if |$G\le \mathcal {J}_{2}$|.
Finally, since cos h(e)* must assume values in the [ − 1, 1] interval, equation (57) implies constraints on the values of the mean momenta.
In the last case, |A| = B and equation (60) simplifies into two different formulae depending on the sign of A.
The analysis above clearly shows that it is possible to prepare the system in such a way to induce an aperiodic dynamical evolution. However, the substitution of values for G, |$\tilde{G}$|, |$\tilde{H}_{\ast }$| and |$\mathcal {J}_{2}$| typical of planetary systems (even in the case of pulsar planetary systems) shows that the orbits in correspondence with the equilibrium point have a very small semi-major axis which either puts the orbit inside the main body or in a zone in which the approximation of weak field starts to fail. In this respect then the equilibrium condition is interesting, but for a meaningful physical interpretation an analysis at higher PN orders and/or within the framework of the full two-body problem is required.
5.5.1.2 Equilibria with sin h* = 0
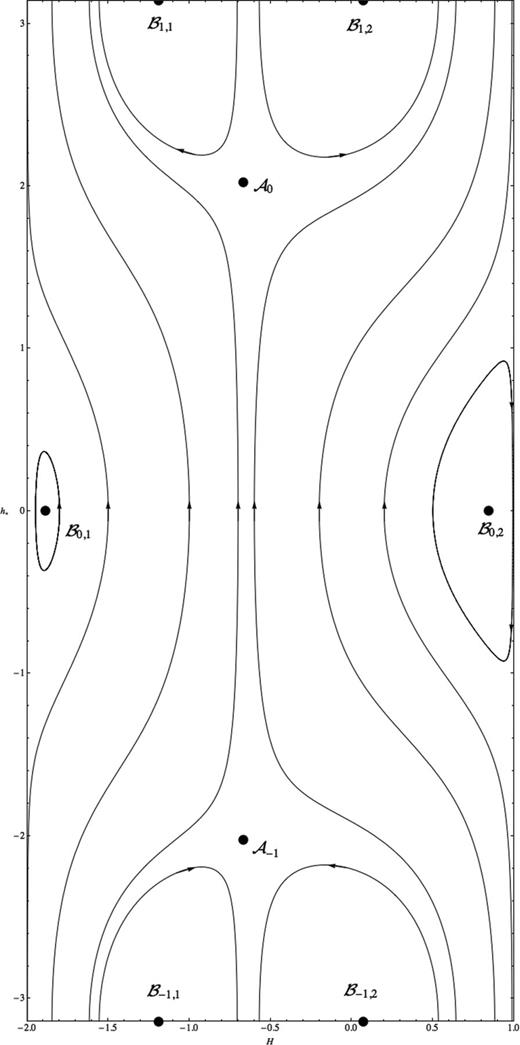
The results above indicate that the phase space has at most six fixed points, but our inability to solve equation (74) in the general case prevents us from giving a complete general analysis. Thus, here we limit ourselves to show, in Fig. 1, a sample of the phase space for a specific choice of the parameters, in order to give an idea of the kind of structures that one is likely to encounter in this analysis.
5.5.2 Exact solution for H(t)
We now derive an analytical solution for the time variation of H. The availability of a closed-form solution for H(t) allows us to obtain immediately the time evolution of cos h* via inversion of Hamiltonian (27).11 With H(t) and cos h*(t) it is then possible in principle to integrate the equations of motion for the remaining coordinates. Additionally, the analytical expression will allow us to calculate exactly the period of the oscillatory motion of H(t) and to make quantitative predictions about the behaviour of real physical systems in Section 6.
6 APPLICATION TO PHYSICAL SYSTEMS
We are now ready to apply the machinery we have developed so far to some real physical systems. We will consider three examples of interest: a Mercury-like planet, an exoplanet in a close orbit around a pulsar and the Earth-orbiting Gravity Probe B experiment. It is clear that because of our initial assumptions we will consider highly idealized systems; we have to stress again that our goal here is not to produce accurate predictions of the dynamical evolution of realistic physical models, but rather to highlight the role that relativistic effects play in the long term.
We will find that in all cases the spin–orbit and spin–spin couplings induce periodic oscillations of the mean orbital plane and, at the same time, of the mean spin vector. Such effects are typically small for the orbital plane, but, because of the conservation of the z-component of the total angular momentum |$\tilde{H}_\ast$|, they correspond to non-negligible oscillations in the orientation of the mean spin.
We have to point out that the perturbative treatment outlined in the previous sections produces results in terms of the components of the mean angular momentum vectors with respect to a fixed (non-rotating) centre-of-mass reference system (rather than in terms of obliquity and relative orientations). Therefore, in the geometrical interpretations of our results, we will always be referring to absolute (as opposed to relative) orientation angles.
Given the small magnitude of the quantities involved in the computations, in order to avoid numerical issues we performed all calculations using the mpmath multiprecision library (Johansson et al. 2012).
6.1 Mercury-like planet
In the simplified case in which the Sun is a rigid homogeneous sphere rotating around a fixed axis, and a Mercury-like planet is the only body orbiting it, a set of possible initial values for the parameters of the system are displayed in Table 2. The parameters correspond to a Mercury-sized object orbiting at 0.47 au from the Sun in an orbit with eccentricity 0.2 and inclination 7°. The plane of the ecliptic is identified as being perpendicular to the spin axis of the Sun. The planet rotates with a period of 1405 h, and the absolute inclination of its spin vector is close to the value of the orbital inclination. Its radius r1 is 2439 km.
Initial values (in SI units) for the parameters of a simplified Sun–Mercury two-body system.
| Parameter | Value (SI units) |
|---|---|
| L0 | 2.77 × 1015 |
| G0 | 2.71 × 1015 |
| H0 | 2.69 × 1015 |
| |$\tilde{G}_{0}$| | 2.95 × 106 |
| |$\tilde{H}_{0}$| | 2.93 × 106 |
| J2 | 1.12 × 1042 |
| r1 | 6.37 × 106 |
| Parameter | Value (SI units) |
|---|---|
| L0 | 2.77 × 1015 |
| G0 | 2.71 × 1015 |
| H0 | 2.69 × 1015 |
| |$\tilde{G}_{0}$| | 2.95 × 106 |
| |$\tilde{H}_{0}$| | 2.93 × 106 |
| J2 | 1.12 × 1042 |
| r1 | 6.37 × 106 |
Initial values (in SI units) for the parameters of a simplified Sun–Mercury two-body system.
| Parameter | Value (SI units) |
|---|---|
| L0 | 2.77 × 1015 |
| G0 | 2.71 × 1015 |
| H0 | 2.69 × 1015 |
| |$\tilde{G}_{0}$| | 2.95 × 106 |
| |$\tilde{H}_{0}$| | 2.93 × 106 |
| J2 | 1.12 × 1042 |
| r1 | 6.37 × 106 |
| Parameter | Value (SI units) |
|---|---|
| L0 | 2.77 × 1015 |
| G0 | 2.71 × 1015 |
| H0 | 2.69 × 1015 |
| |$\tilde{G}_{0}$| | 2.95 × 106 |
| |$\tilde{H}_{0}$| | 2.93 × 106 |
| J2 | 1.12 × 1042 |
| r1 | 6.37 × 106 |
Fig. 2 shows the time evolution of the absolute axial and orbital inclinations of the planet for different initial values of the angle h*. The period of the evolution, calculated from the solution for H(t) in terms of elliptic functions, is 6.03 Ma. When h*, 0 = 0 the system is almost in equilibrium, as the initial axial and orbital inclinations are almost equal and almost parallel to the Sun's spin vector. The amplitude of the periodic oscillation increases together with h*, 0. The oscillation is much wider in axial than in orbital inclination; this is a consequence of the fact that for this system |$G\gg \tilde{G}$|: the conservation of |$\tilde{H}_{\ast }=H+\tilde{H}$|, G and |$\tilde{G}$| imposes that a small change in the z-component of the mean orbital angular momentum, H, is proportionally a much larger change in the z-component of the mean spin vector, |$\tilde{H}$|.
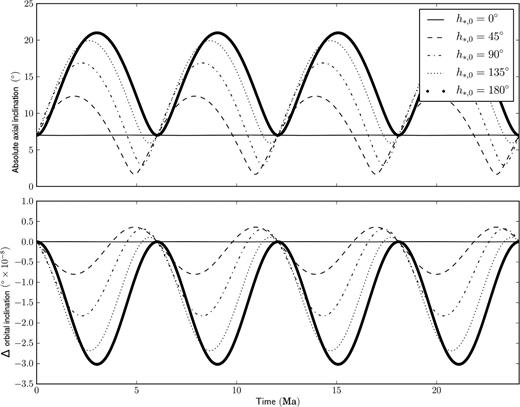
Time evolution of the absolute axial (top panel) and orbital (bottom panel) inclinations of a Mercury-like object orbiting the Sun. In the bottom panel, the quantity on the y-axis is the difference from the initial value of orbital inclination. The different curves correspond to different initial values for h*. Time is measured in millions of years.
The main effect that can be observed in Fig. 2 is the geodetic precession. Indeed, in this dynamical system the slow rotations of both the planet and the Sun minimize the spin–spin interactions, and effectively relegate the spin–orbit effects to a precession of the planet's mean spin axis around the mean orbital angular momentum vector. This can be verified by noting that the precessional rate given by equation (51) yields essentially the same period of 6.03 Ma as the general formula in terms of elliptic functions.
The correlation between the oscillation amplitude and h*, 0 has a simple geometrical interpretation: when h*, 0 = 0, the mean spin and orbital angular momentum vectors share the same inclination (7°) and nodal angle, and therefore they are parallel (i.e. their relative angular separation is zero) and no precession motion takes place; as the difference in initial nodal angles (i.e. h*, 0) increases, the relative angular separation between the two vectors increases too and the mean spin precesses around the mean orbital angular momentum vector. When h*, 0 = π, the initial angular separation reaches the maximum possible value, and the projection of the precession motion on the z-axis (which is what is visualized in Fig. 2) reaches its maximum oscillatory amplitude too.
6.2 Pulsar planet
In this second case, the central body is a millisecond pulsar with a Jupiter-like planet in close orbit. The parameters of the system are displayed in Table 3, and they are similar to the estimated parameters of the PSR J1719−1438 system (Bailes et al. 2011): the mass of the star is 1.4 M⊙, its spin period is 5.8 ms and its diameter is 20 km, while the planet has a mass roughly equal to Jupiter (1.02MJ) and a radius of 0.4rJ, orbiting on a moderately inclined (i = 20°) near-circular (e = 0.06) orbit with semi-major axis of 600 000 km. Lacking estimates on the rotational state of the planet, we hypothesize a spin period similar to Jupiter (10 h) and an absolute inclination of the spin vector of 10°. As in the preceding case, the plane of the ecliptic is identified as being perpendicular to the spin axis of the star.
Initial values (in SI units) for the parameters of a pulsar–Jovian planet two-body system.
| Parameter | Value (SI units) |
|---|---|
| L0 | 3.33 × 1014 |
| G0 | 3.32 × 1014 |
| H0 | 3.12 × 1014 |
| |$\tilde{G}_{0}$| | 5.32 × 1010 |
| |$\tilde{H}_{0}$| | 5.23 × 1010 |
| J2 | 4.83 × 1041 |
| r1 | 2.76 × 107 |
| Parameter | Value (SI units) |
|---|---|
| L0 | 3.33 × 1014 |
| G0 | 3.32 × 1014 |
| H0 | 3.12 × 1014 |
| |$\tilde{G}_{0}$| | 5.32 × 1010 |
| |$\tilde{H}_{0}$| | 5.23 × 1010 |
| J2 | 4.83 × 1041 |
| r1 | 2.76 × 107 |
Initial values (in SI units) for the parameters of a pulsar–Jovian planet two-body system.
| Parameter | Value (SI units) |
|---|---|
| L0 | 3.33 × 1014 |
| G0 | 3.32 × 1014 |
| H0 | 3.12 × 1014 |
| |$\tilde{G}_{0}$| | 5.32 × 1010 |
| |$\tilde{H}_{0}$| | 5.23 × 1010 |
| J2 | 4.83 × 1041 |
| r1 | 2.76 × 107 |
| Parameter | Value (SI units) |
|---|---|
| L0 | 3.33 × 1014 |
| G0 | 3.32 × 1014 |
| H0 | 3.12 × 1014 |
| |$\tilde{G}_{0}$| | 5.32 × 1010 |
| |$\tilde{H}_{0}$| | 5.23 × 1010 |
| J2 | 4.83 × 1041 |
| r1 | 2.76 × 107 |
Fig. 3 shows the time evolution of the absolute axial and orbital inclinations of the planet for different initial values of the angle h*. The period of the evolution is much shorter than in the previous case, amounting to circa 40 yr. This system is lacking an almost-equilibrium point for h*, 0 = 0, as the initial values of the inclinations are not close (although the amplitude of the oscillation is still correlated to h*, 0). As in the previous case, the amplitude of the oscillation for the axial inclination dominates over the oscillation in orbital inclination, but since the |$\tilde{G}/G$| ratio is now larger the oscillation in orbital inclination is also larger, reaching almost 0| ${.\!\!\!\!\!\!^{\circ}}$|01 when h*, 0 = 180°.
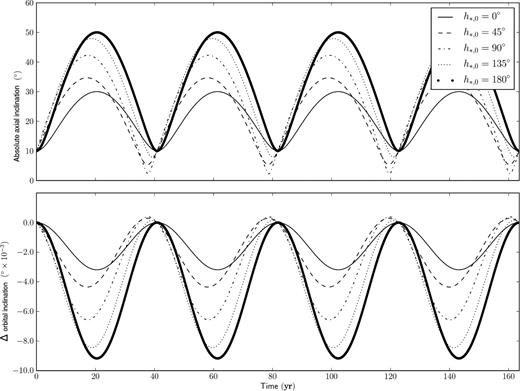
Time evolution of the absolute axial (top panel) and orbital (bottom panel) inclinations of a pulsar planetary two-body system. In the bottom panel, the quantity on the y-axis is the difference from the initial value of orbital inclination. Time is measured in years.
6.3 Earth-orbiting gyroscope
In this last example, we consider the gravitomagnetic effects on a gyroscope in low orbit on board a spacecraft around the Earth. The parameters of the system are taken from the experimental setup of the Gravity Probe B mission (Everitt et al. 2011): the orbit is polar (i = 90| ${.\!\!\!\!\!\!^{\circ}}$|007) with a semi-major axis of 7027 km and low eccentricity (e = 0.0014). The gyroscope consists of a rapidly rotating quartz sphere (38 mm diameter) whose spin axis is lying on the Earth's equatorial plane (i.e. the spin plane is also ‘polar’). The spin vector of the gyroscope and the orbital angular momentum vector of the spacecraft, both lying on the equatorial plane, are perpendicular to each other. Translated into mean Delaunay and SA parameters, this initial geometric configuration implies H ∼ 0, |$\tilde{H}_{\ast }\sim 0$|, Gxy ∼ G, |$\tilde{G}_{xy\ast }\sim \tilde{G}$| and h* = ±π/2 [with the sign depending on the values of h and |$\tilde{h}$| – note that in Everitt et al. (2011) the configuration shown in fig. 1 implies h* = −π/2]. The substitution of these values in the general formula for H(t) yields a period of roughly 195 ka.
7 CONCLUSIONS AND FUTURE WORK
In this paper, we have analysed the post-Newtonian evolution of the restricted relativistic two-body problem with spin. Our analysis has been performed via a modern perturbation scheme based on Lie series. The first important advantage of this method is that it allows us to work out all the calculations in a closed analytic form, thus permitting an analysis of long-term perturbative effects which are otherwise very difficult to detect with numerical techniques. Secondly, the Lie series formalism can be iterated to higher post-Newtonian orders using essentially the same procedure as employed in this study, and the connection between the transformed coordinates at each perturbative step is given by explicit formulae [contrary to the classical von Zeipel method (von Zeipel 1916)]. Finally, the Lie series methodology can be easily implemented on computer algebra systems, thus relegating the most cumbersome parts of the development of the theory to automatized algebraic manipulation.
Our analysis reproduces well-known classical results such as the relativistic pericentre precession, and the Lens–Thirring and geodetic effects. In addition, we are able to thoroughly investigate the complex interplay between spin and orbit, and we provide a novel solution for the full averaged equations of motion in terms of Weierstrass elliptic functions. This result is particularly interesting as it establishes a connection with recent developments in the exact solution of geodesic equations (see e.g. Hackmann et al. 2010; Scharf 2011; Gibbons & Vyska 2012), which also employ elliptic and hyperelliptic functions.
From the mathematical point of view, our investigation highlights the existence of a rich dynamical environment, with multiple sets of fixed points and aperiodic solutions arising with particular choices of initial conditions. From a physical point of view, we have shown how some of these exotic configurations appear in correspondence with initial conditions for which the approximation of our model starts to be unrealistic. In this sense, the generalization of these results to a full two-body model (to be tackled in an upcoming publication) will provide a more realistic insight into the physics of these particular solutions.
The application of our results to real physical systems shows how relativistic effects can accumulate over time to induce substantial changes in the dynamics. In particular, the absolute orientation of the spin vector of planetary-sized bodies in the Solar system undergoes significant changes, driven chiefly by the geodetic effect, over geological time-scales. In close pulsar planets, the evolution time shortens drastically to few years, and the effects on the planet's orbit increase by multiple orders of magnitude. In this sense, our results could be used to devise new tests of General Relativity based on precise measurements of the orbital parameters of pulsar planets and similar dynamical systems.
There are in truth other reasons why all our tests are focused on weak field: we live in a weak gravitational field and it is impossible to control gravitational fields like we do, for example, with electromagnetism.
The monopole–quadrupole interaction terms for compact bodies will depend on their internal structure and equations of state. For black holes, they are given, for example, in Damour (2001).
Vice versa, short-term periodic variations of the post-Newtonian elements will have amplitudes of order 1/c2 and the precise connection with the Newtonian elements therefore becomes important.
This reference system is referred to as ‘invariable’ in Gurfil et al. (2007).
This transformation is reminiscent of the treatment of single-resonance dynamics in the N-body problem (see Lemma 4 in Morbidelli & Giorgilli 1993).
This is analogous to the coordinates in the Delaunay set becoming undefined for zero inclination/eccentricity.
This is of course an expected result, since equilibrium points in 1 degree-of-freedom Hamiltonian systems must either be centres, saddles or have a double zero eigenvalue (Arnold 1989).
This, of course, is not possible if singular equilibrium points are present or if we are dealing with the indeterminate forms arising when the nodal angles are undefined.

{kind=link}
{kind=link}
{kind=link}