


Abstract
Soil moisture performs a key function in the hydrologic process and understanding the global-scale water cycle. However, estimations of soil moisture taken from current sun-synchronous orbit satellites are limited in that they are neither spatially nor temporally continuous. This limitation creates discontinuous soil moisture observation from space and hampers our understanding of the fundamental processes that control the surface hydrologic cycle across both time and space domains. Here, we propose to use frequent soil moisture observations from NASA's constellation of eight micro-satellites called the Cyclone Global Navigation Satellite System (CYGNSS) together with the Soil Moisture Active Passive (SMAP) to assimilate subdaily scale soil moisture into a land surface model (LSM). Our results, which are based on triple collocation analysis (TCA), show how current scientific advances in satellite systems can fill previous gaps in soil moisture observations in subdaily scale by past observations, and eventually adds value to improvements in global scale soil moisture estimates in LSMs. Overall, TCA-based fractional mean square errors of LSM soil moisture are improved by 61.3% with the synergetic assimilation of CYGNSS data with SMAP soil moisture observations. However, assimilating satellite-based soil moisture over dense vegetation areas can degrade the performance of LSMs as these areas propagate erroneous soil moisture information to LSMs. To our knowledge, this study is the first global assimilation of GNSS-based soil moisture observations in LSMs.
Export citation and abstract BibTeX RIS

Original content from this work may be used under the terms of the Creative Commons Attribution 4.0 license. Any further distribution of this work must maintain attribution to the author(s) and the title of the work, journal citation and DOI.
1. Introduction
Surface soil moisture controls the partitioning of terrestrial water and energy fluxes, thereby governing the interaction between land surface and atmosphere (Famiglietti and Wood 1994, Seneviratne et al 2010, Hirschi et al 2011, Tuttle and Salvucci 2016, Kim and Lakshmi 2019). Surface soil moisture is also an important variable in determining hydrological extremes such as droughts, floods, wildfires, wind erosion, and dust outbreaks (Lakshmi et al 2004, Ishizuka 2005, Haarsma et al 2009, Kim and Choi 2015, Brocca et al 2017, Fang et al 2021a).
Global-scale soil moisture can be estimated from various satellite systems and from quantitative methods such as land surface models (LSMs) (Kerr et al 2001, Koster et al 2009, Jackson et al 2010, Entekhabi et al 2010a, Fang and Lakshmi 2014, Abolafia‐Rosenzweig et al 2019). However, the physics of the LSMs on a global scale involves numerous uncertainties due to factors such as model parameterization deficiencies. Hydrological models with data assimilation updates hydrological states by integrating observations and model outputs using weights based on our evaluation of individual accuracy (Reichle et al 2002, Crow and Ryu 2009, He et al 2021).
Researchers have proposed various methods for retrieval of near-surface soil moisture from sun-synchronous-orbit (SSO) satellite microwave instruments. Beginning with retrieval algorithms for high frequency microwave sensors coupled with hydrological modeling (Lakshmi et al 1997), the field of remote sensing of soil moisture has progressed to C-band (Wagner et al 1999, Njoku et al 2003) to the L-band using Soil Moisture Active Passive (SMAP) (Entekhabi et al 2010a) and Soil Moisture and Ocean Salinity (SMOS) (Kerr et al 2001). Currently, the soil moisture from SMAP has been downscaled to 1 km using vegetation and surface temperature (Fang et al 2013, 2018, 2020) and Sentinel-1A/Sentinel-1B SAR data (Das 2019) and to 400 m using the visible infrared imaging radiometer suite sensor on the Ecostress mission (Fang et al 2021b). However, one major limitation of these methods is that coverage of SSO satellite-based soil moisture observations is neither spatially nor temporally continuous. Recently, researchers have experimented with the application of Global Navigation Satellite System (GNSS) signals to investigate surface soil moisture, using the Cyclone Global Navigation Satellite System (CYGNSS) constellation of eight micro-satellites which was launched into low Earth orbit (LEO) by NASA in December 2016. In contrast to microwave soil moisture retrieval satellite systems in SSO, which have revisit times of 1–3 d, the CYGNSS micro-satellites in LEO receive surface-reflected GPS signals at a revisit time of 2.8 (median) hours per day (Ruf et al 2016) and have the potential to provide frequent soil wetness conditions (Chew and Small 2018, Kim and Lakshmi 2018, Yueh et al 2020).
By adding this high-temporal-repeat data from the eight micro-satellites in LEO to the data from current SSO satellite systems, we can investigate the possible advantages of frequent soil moisture observation systems in helping us analyze global-scale, satellite-enhanced soil moisture dynamics from LSM on a diurnal time frame.
In this study, using an ensemble Kalman filter (EnKF) scheme and triple collocation analysis (TCA), we demonstrate the usefulness of subdaily scale soil moisture estimates from SSO and LEO satellites in improving LSMs, thus advancing our understanding of diurnal soil moisture dynamics on a global scale.
2. Datasets and methodology
2.1. Soil moisture estimates from satellites
Here, we used soil moisture data from four satellite systems, SMAP, CYGNSS, ASCAT, and SMOS from April 2017 to December 2020 (table 1): (a) SMAP monitors changes in the natural microwaves emitted from the earth's surface using a low microwave frequency L-band radiometer (1.41 GHz, wavelength = 21 cm) with nominal incidence angle 40° (Chan et al 2016). We used data from SMAP L2 Version 7's descending and ascending paths with the Single Channel Algorithm-Vertical (SCA-V). (b) CYGNSS can provide many observations per day as there are eight CYGNSS microsatellites that receive signals from GPS satellites already orbiting the Earth. Specifically, the frequency transmitted from GPS satellites is a microwave band with a reflected electromagnetic wave containing information about how much water exists in surface soil (Ulaby et al 1978). As the CYGNSS and GPS constellations move around the earth, the interaction of the two systems results in a new image of soil moisture within a latitude domain of approximately 40°S to 40°N every few hours, compared to every few days for a single satellite (Ruf et al 2012). The University Corporation for Atmospheric Research (UCAR) and the University of Colorado at Boulder (CU) produce daily and subdaily soil moisture data, and UCAR/CU CYGNSS data is publicly available. This data was derived from version 2.1 of the CYGNSS L1 product. A linear relationship between SMAP soil moisture and CYGNSS reflectivity is calculated for a given location and used to convert CYGNSS observations into soil moisture (Chew and Small 2020). (c) In addition to SMAP and CYGNSS soil moisture data, we employed two additional sources of soil moisture data to conduct TCA. The first source was the ASCAT soil moisture data distributed by the EUMETSAT H-SAF, called H111, which is based on the TU Wien algorithm (Wagner et al 2013). This product is a combination of the MetOp-A and B satellites which acquire radar backscatter measurements at a frequency of C-band (5.3 GHz, wavelength = 5.7 cm). Our second source was SMOS soil moisture data from INRA-CESBIO (SMOS-IC) V106 (Wigneron et al 2021). A Microwave Imaging Radiometer with Aperture Synthesis (MIRAS) onboard SMOS is an L-band (1.41 GHz, wavelength = 21 cm) 2D interferometric radiometer that monitors variations in the natural microwaves emitted from the Earth's surface (Kerr et al 2001).
Table 1. Product descriptions. The accessible link for each data can be found in the acknowledgement.
| Product | Abbreviation | Spatial resolution | Revisit coverage | Grid information | Version |
|---|---|---|---|---|---|
| Soil Moisture Active Passive | SMAP | 36 km | Varies (2–3 d) | EASE2 | L2 V7 |
| Cyclone Global Navigation Satellite System | CYGNSS | 36 km | Varies (7 h mean) | EASE2 | L3 V1.0 |
| Advanced Scatterometer | ASCAT | 25 km | Varies (1–3 d) | DGG | H111 |
| Soil Moisture and Ocean Salinity | SMOS | 25 km | Varies (2–3 d) | EASE2 | SMOS-IC V106 |
| Noah-Multiparameterization Land Surface Model | Noah-MP LSM | 0.36° | Hourly | Equiangular | V3.6 |
2.2. Data assimilation
For the model simulation and data assimilation tasks, we used the NASA Land Information System (LIS), which provides a framework for integrated land surface data assimilation that supports both sequential and non-sequential methods (Kumar et al
2008). Prior to assimilation, each set of remote sensing soil moisture retrievals was bias corrected to match the long-term model climatology using a cumulative distribution function matching approach (Reichle 2004, Reichle et al
2007, Kumar et al
2014). We assimilated daily CYGNSS, subdaily CYGNSS, ascending/descending SMAP, and subdaily CYGNSS + ascending/descending SMAP moisture estimates into Noah multi-parameterization (Noah-MP) 3.6 LSM using an EnKF algorithm with 12 ensemble members, which can produce enough ensemble spread (uncertainty) of the prior soil moisture estimates for data assimilation as demonstrated in previous studies (e.g. Reichle et al
2002, Crow and Wood 2003). Noah-MP (i.e. prior model employed in this study) is an improvement over the baseline model, Noah LSM (Niu et al
2011, Yang et al
2011). The Noah-MP LSM was forced with meteorological forcing data from the NASA Modern-Era Retrospective analysis for Research and Applications, version 2 (MERRA-2) and the North American Land Data Assimilation System Phase 2 (NLDAS-2) forcing data sets (Xia et al
2012, Gelaro et al
2017). The model was spun up from January 2006 to March 2017 to ensure that the internal model prognostic states are in equilibrium the driving meteorology. In addition, in order to account for difficulties in retrieving soil moisture products from SMAP and CYGNSS, the soil moisture retrievals were masked out for high vegetation density when the green vegetation fraction values used in LSM exceeded 0.7. Furthermore, the observational soil moisture data were masked out if SMAP's retrieval information in the retrieval quality flag did not indicate 'recommended quality' (Kumar et al
2014). Consequently, we have a smaller number of observational data sets for data assimilation, as shown in figure 1 and figure S1 (available online at stacks.iop.org/ERL/16/074041/mmedia): figures 1(a) and (b) show the total valid number of assimilated soil moisture data observations, and figures S1(a) and (b) show the number
of observations from SMAP and from SMAP+CYGNSS during the study period. The model simulations and assimilations were conducted globally at an evenly gridded 0.36 spatial resolution. Detailed information about the perturbation parameter settings for data assimilation are included in table S1. For additional details, please refer to Kumar et al (2009).
spatial resolution. Detailed information about the perturbation parameter settings for data assimilation are included in table S1. For additional details, please refer to Kumar et al (2009).

Figure 1. (a) The total number of SMAP soil moisture observations assimilated into LSM. (b) Map similar to (a) but for CYGNSS and SMAP data. (c) fMSE map of soil moisture estimations from open loop (no satellite observation assimilated) the Noah-MP LSM.
Download figure:
Standard image High-resolution image2.3. Triple collocation analysis
Researchers have been able to scrutinize independent errors in a time series data without the aid of reference values (Scipal et al 2008). Here, we employed the triple collocation (TC) method (Dong and Crow 2017, Gruber et al 2020, Kim et al 2020) to investigate independent errors in soil moisture estimations from subdaily observational soil moisture-assimilated LSMs, and we show that recent advances in GPS signal and passive microwave observations improve global soil moisture estimates. One TC error estimator, the fractional mean square error (fMSE) metric, provides intuitive inference in the accuracy of data: when the fMSE is '0', the data do not include noise, while an fMSE of '1' implies that only noise exists within the data, hence one can interpret an fMSE value lower than 0.5 to imply that the signal is stronger than the noise. The fMSE can be calculated from equation (1):

where i,j ∈ [x, y, z] (i ≠ j), and SNR is the signal-to-noise ratio  . And the error variance (
. And the error variance ( ) of each data set can be calculated without knowing the true value of soil moisture:
) of each data set can be calculated without knowing the true value of soil moisture:
Where  is a variance of each product and
is a variance of each product and  is covariance of two products. In order to intercompare the relative error variances of soil moisture from the Noah-MP LSM soil moisture (hereafter openloop; OL soil moisture), daily CYGNSS-assimilated LSM, subdaily CYGNSS-assimilated LSM, ascending/descending SMAP-assimilated LSM, and subdaily CYGNSS + ascending/descending SMAP-assimilated LSM data sets based on the TCA, we calculated the fMSE of each product. The TCA triplets were constructed with soil moisture data from ASCAT and SMOS soil moisture together with OL soil moisture, CYGNSS, or SMAP-assimilated soil moisture data. In addition, it is worth noting that the correlation coefficient and the root-mean-square-difference (RMSD) are also important performance metrics (Entekhabi et al
2010b). The linear correlation coefficient of the individual data sets can be calculated from fMSE, and McColl et al (2014) showed that the linear correlation coefficient of the individual data sets can be calculated from the reverse of the fMSE formula (
is covariance of two products. In order to intercompare the relative error variances of soil moisture from the Noah-MP LSM soil moisture (hereafter openloop; OL soil moisture), daily CYGNSS-assimilated LSM, subdaily CYGNSS-assimilated LSM, ascending/descending SMAP-assimilated LSM, and subdaily CYGNSS + ascending/descending SMAP-assimilated LSM data sets based on the TCA, we calculated the fMSE of each product. The TCA triplets were constructed with soil moisture data from ASCAT and SMOS soil moisture together with OL soil moisture, CYGNSS, or SMAP-assimilated soil moisture data. In addition, it is worth noting that the correlation coefficient and the root-mean-square-difference (RMSD) are also important performance metrics (Entekhabi et al
2010b). The linear correlation coefficient of the individual data sets can be calculated from fMSE, and McColl et al (2014) showed that the linear correlation coefficient of the individual data sets can be calculated from the reverse of the fMSE formula ( . In this study, we did not include RMSD metrics as we did not have enough in-situ data over the CYGNSS domain and hourly data are not available in many places (figure S1). However, we believe that for the purposes of the current study, fMSE serves well in comparing the data sets' capability of capturing temporal soil moisture variation before/after data assimilation (Gruber et al
2016b, Kim et al
2020). A detailed description of the fMSE calculation is included in the supplementary information.
. In this study, we did not include RMSD metrics as we did not have enough in-situ data over the CYGNSS domain and hourly data are not available in many places (figure S1). However, we believe that for the purposes of the current study, fMSE serves well in comparing the data sets' capability of capturing temporal soil moisture variation before/after data assimilation (Gruber et al
2016b, Kim et al
2020). A detailed description of the fMSE calculation is included in the supplementary information.
3. Results and discussion
3.1. Soil moisture observations from SSO and LEO satellites
Figures 1(a) and (b) show the total valid number of assimilated soil moisture data observations from SSO (i.e. SMAP) and LEO (i.e. CYGNSS) systems, respectively, during the study period (2017–2020). From figure S1(a), it is obvious that soil moisture from SSO satellites can observe soil moisture data at one to three days; and figure 1(b) illustrates how the LEO satellites' coverage can enhance the observation of soil moisture from space by providing frequent overpasses. Due to the intrinsic attributes of the LEO microsatellites, they cannot observe over areas outside of the ∼38°N or ∼38°S latitudes. However, by assimilating frequent observational soil moisture information (figures 1(a) and (b)) from SSO and LEO into LSMs, we can approach optimal model performance and produce soil moisture estimates from LSMs which preserve the subdaily satellite-based soil moisture observed patterns (figure S1(c)). In addition, it is worth noting that the number of observations in figures S1(a) and (b) do not guarantee the same number of data assimilated in LSM. The actual number of observations that passed the quality control process and were assimilated into the Noah-MP LSM are shown in figures 1(a) and (b)). It is clear that over densely forested and extremely dry areas, the amount of satellite-based soil moisture data available for data assimilation are very limited. Figure 1(c) shows the fMSE map of soil moisture estimations from OL soil moisture data (i.e. without assimilating CYGNSS or SMAP data). As a pixel color approaches red, it indicates erroneous soil moisture estimations which may potentially result in other erroneous hydrological variable estimations. By assimilating frequent observational soil moisture information (figures 1(a) and (b)) into LSM, we expect to improve the quality of the soil moisture data which impacts subdaily scale patterns of soil moisture dry down.
3.2. Dependence of error characteristics of CYGNSS- and SMAP-enhanced LSM soil moisture data on different land covers
The map in figure 2(a) shows how subdaily soil moisture observations from SSO and LEO satellites can improve the quality of soil moisture predictions from the Noah-MP LSM. This improvement is represented by the differences in fMSE ( fMSE) values of OL soil moisture and CYGNSS- and SMAP-assimilated soil moisture data. Areas of improved soil moisture quality are marked with blue-shaded pixels, and areas of degraded quality are shown with red-shaded pixels. Overall, assimilating subdaily observational soil moisture data can significantly improve the fMSE of soil moisture predictions except in densely vegetated areas (figure 2(b)). Assimilating subdaily scale observational soil moisture information into LSMs may be expected to lead more improvements in model estimates of soil moisture than assimilating less frequent observations. On the other hand, it is worth noting that too frequent assimilation of observational data can also lead to ensemble collapses and inhibit further improvement of assimilation performance (Anderson 2001, Dong et al
2015, Kwon et al
2016). In specific, in EnKF, the ensemble spread could decrease as more information from observations is assimilated into the system. Thus, it is sometimes necessary to implement inflation which can help the DA system to maintain adequate variability and prevent the ensemble spread from decreasing (Anderson 2009). Although inflation methods have not been employed in this study, ensemble perturbations applied to the atmospheric focing and model state variables with 1 h and 6 h frequencies, respectively, can mitigate the ensemble collapse issue.
fMSE) values of OL soil moisture and CYGNSS- and SMAP-assimilated soil moisture data. Areas of improved soil moisture quality are marked with blue-shaded pixels, and areas of degraded quality are shown with red-shaded pixels. Overall, assimilating subdaily observational soil moisture data can significantly improve the fMSE of soil moisture predictions except in densely vegetated areas (figure 2(b)). Assimilating subdaily scale observational soil moisture information into LSMs may be expected to lead more improvements in model estimates of soil moisture than assimilating less frequent observations. On the other hand, it is worth noting that too frequent assimilation of observational data can also lead to ensemble collapses and inhibit further improvement of assimilation performance (Anderson 2001, Dong et al
2015, Kwon et al
2016). In specific, in EnKF, the ensemble spread could decrease as more information from observations is assimilated into the system. Thus, it is sometimes necessary to implement inflation which can help the DA system to maintain adequate variability and prevent the ensemble spread from decreasing (Anderson 2009). Although inflation methods have not been employed in this study, ensemble perturbations applied to the atmospheric focing and model state variables with 1 h and 6 h frequencies, respectively, can mitigate the ensemble collapse issue.
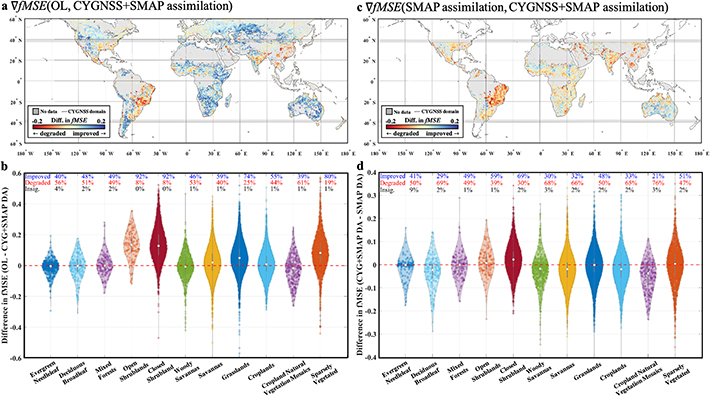
Figure 2. Error characteristics of subdaily-observation-assimilated soil moisture data. (a) Spatial distribution of fMSE from LSM resulting from the assimilation of CYGNSS + SMAP soil moisture data. As a pixel's color becomes bluer (redder), soil moisture estimations become more accurate (more erroneous). (b) Violin plots of differences in fractions of mean square errors ( ) before and after assimilating subdaily soil moisture observations into the land surface model (LSM) for 11 land cover classes. White dots show median values, gray boxes indicate the interquartile range, and the thin gray lines extend from the 5th to the 95th percentiles. A value greater than 0 indicates improvement in soil moisture quality due to subdaily scale soil moisture assimilation. (c) This map illustrates a case in which CYGNSS contributes to improving soil moisture performance in the Noah-MP LSM in comparison with the improvement made by SMAP assimilation alone. Blue-shaded pixels indicate areas improved by CYGNSS. (d) similar as (b) but ∇fMSE for CYGNSS + SMAP assimilation and SMAP assimilation.
) before and after assimilating subdaily soil moisture observations into the land surface model (LSM) for 11 land cover classes. White dots show median values, gray boxes indicate the interquartile range, and the thin gray lines extend from the 5th to the 95th percentiles. A value greater than 0 indicates improvement in soil moisture quality due to subdaily scale soil moisture assimilation. (c) This map illustrates a case in which CYGNSS contributes to improving soil moisture performance in the Noah-MP LSM in comparison with the improvement made by SMAP assimilation alone. Blue-shaded pixels indicate areas improved by CYGNSS. (d) similar as (b) but ∇fMSE for CYGNSS + SMAP assimilation and SMAP assimilation.
Download figure:
Standard image High-resolution imageIn addition, areas where the range of soil moisture variability is lower than the random error variance—such as arid areas with high sand percentages (Pan et al 2016) or dense vegetation canopies (Kim et al 2020)—can also propagate erroneous soil moisture information to LSMs. During the data assimilation, we assumed constant measurement errors in space and time for SMAP and CYGNSS data due to the difficulty in characterizing spatially and temporally distributed errors at the global scale. If the actual measurement error over vegetated regions was higher than the measurement error of 0.02 m3m−3 used, the erroneous soil moisture would be weighted above its true accuracy. That is, the underestimation of measurement errors over vegetated areas could result in overestimation of the Kalman gain; and consequently, erroneous satellite-based soil moisture information can be propagated to the Noah-MP LSM. To minimize this problem, we only assimilated the soil moisture retrievals where the green vegetation fraction values used in the Noah-MP LSM were lower than 0.7 and the SMAP's retrieval information in the retrieval quality flag indicated 'recommended quality' (section 2.2). Furthermore, figure 2(c) illustrates a case in which CYGNSS contributes to improving soil moisture performance in the Noah-MP LSM by comparison with the improvement made by SMAP assimilation alone. Blue-shaded pixels indicate areas in which LSMs could not be improved by SMAP because soil moisture observations from CYGNSS data were unavailable. Interestingly, CYGNSS soil moisture observation has a strong potential for improving the Noah-MP LSM performance except over densely vegetated areas such as deciduous broadleaf, savannas, and croplands (figure 2(d)). However, it appears that CYGNSS assimilation can degrade SMAP-only assimilation in some cases. The inferiority of CYGNSS + SMAP assimilation over SMAP-only in figures 2(c) and (d) may be due partially to a defect in CYGNSS data related to sampling time and spatial resolution, both of which are obvious error sources in CYGNSS data. To be specific, CYGNSS sampling times are random (i.e. signal of opportunity) and the accuracy of these different sampling times has not been well studied. The subdaily scale UCAR/CU CYGNSS soil moisture retrieval algorithm used in this study was not designed to consider sampling time differences, and the subdaily UCAR/CU CYGNSS data divided the sampling time into 6 h intervals; so assimilating CYGNSS data at an exact sampling time was impossible. In addition, the spatial resolution we used for CYGNSS might be too coarse to represent 36 km sized pixels—the spatial resolution of CYGNSS depends on soil wetness and vegetation conditions, and it can vary from several kilometers to dozen of kilometers over land. All these uncertainty factors make CYGNSS-based soil moisture retrieval noisier, so reducing the noise/improving CYGNSS retrievals will further improve LSMs. Overall, 42.6% of pixels were improved by daily/subdaily CYGNSS data assimilation, indicating that CYGNSS soil moisture data have the potential to improve LSM (table S2).
3.3. Improvement of soil moisture estimates from LSM by assimilation of subdaily/daily observational soil moisture data
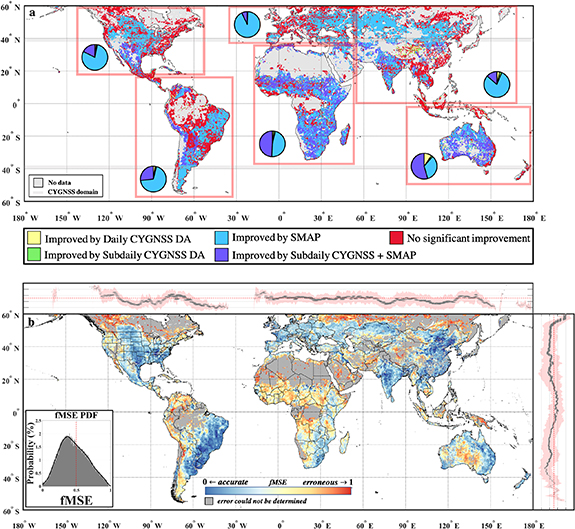
Based on the TCA, it is possible to select the lowest fMSE DA product for each pixel. Figure 3(a) shows areas where subdaily or daily soil moisture data observations have improved the fMSE of LSM soil moisture. Indeed, SMAP's ascending/descending soil moisture plays an important role in improving soil moisture quality; the data obtained from SMAP were responsible for 79%, 69, 92%, 47%, 80%, and 34% of the improved pixels in the rectangular areas containing South America, North America, Africa, Europe, Asia, and Oceania, respectively (blue areas of the pie charts in figure 3(a)). In addition, for the first time, we showed that with the synergetic assimilation of subdaily GNSS signals with SMAP soil moisture observations, LSM soil moisture can be further improved: 18%, 27%, 7%, 49%, 14%, and 54% of the improved pixels were created from subdaily CYGNSS observations (purple areas of the pie charts in figure 3(a)). Figure 3(b) illustrates the fMSE of soil moisture estimates resulting from selecting lowest DA fMSE DA product for each pixel. When the probability density (inset graph in figure 1(c)) and spatial distributions of subdaily assimilated soil moisture data are compared with figure 3(b), the significant global-scale improvements that result from the value of frequent soil moisture data observations become obvious.
{kind=link}
{kind=link}
Figure 3. (a) Areas where subdaily or daily soil moisture observation contributes to improving the land surface model. The pie chart in each red rectangle shows the percentage of pixels improved by subdaily or daily soil moisture observations (gray and blue areas are not included in the pie charts). (b) Spatial distribution of fMSE from LSM resulting from the assimilation of subdaily/daily soil moisture data. As a pixel's color becomes bluer (redder), it indicates more accurate (more erroneous) soil moisture estimations.
Download figure:
Standard image High-resolution image{kind=link}
3.4. Limitations
For TCA, we constructed daily triplets with DA products, an active sensor (ASCAT), and a passive sensor (SMOS) to avoid possible violation of the underlying assumptions of TCA (Kim et al 2020). Since we do not have independent observational soil moisture from sun-synchronous satellites that can provide subdaily scale soil moisture data, we cannot construct triplets with such data. Furthermore, we do not have enough dense soil moisture networks that provide subdaily scale soil moisture within the CYGNSS domain, which limits validation of CYGNSS DA products. We could utilize two model-based soil moisture products to construct triplets with each DA product; however, the simultaneous use of model-based products could imperil the mutual-error-independent results underlying the application of TC. Thus, to fully investigate the improvement of LSM from a subdaily scale observational satellite product with TCA, it will be necessary to construct a triplet with independent subdaily scale soil moisture products in the future.
Another limitation is the lack of diverse, publicly available CYGNSS soil moisture data. As we used one specific version of CYGNSS soil moisture data here, if we assimilate different CYGNSS products that might possibly result in better accuracy, the assimilation results can be significantly improved. In the future, with different CYGNSS soil moisture data, including machine learning-based data (Senyurek et al 2020), change detection algorithm-based data (Kim and Lakshmi 2018), and semiempirical CYGNSS soil moisture model-based data (Yueh et al 2020), we may be able to produce a product that can be evaluated for its ability to improve LSMs.
Also, we used SMOS data to calculate TC statistics, which could share cross-correlated errors with SMAP and thus violate TC assumptions. However, we assumed that the cross-correlated errors of SMAP-assimilated LSM soil moisture and SMOS-IC soil moisture data would be mitigated as the TC statistics were calculated from SMAP-assimilated LSM. Furthermore, we calculated the TC statistics from the assimilated SMAP product, and we used the SMOS-IC algorithm, which is quite different from SMAP's SCA-V algorithm. In a future study, considering instrumental variable algorithms or quadruple collocation analysis could also potentially resolve the cross-correlated error issue (Su et al 2014, Gruber et al 2016a, Cho et al 2017, Dong et al 2019). Specifically, implementation of an extended double instrumental variable algorithm (Dong et al 2020) could be used to estimate product errors and interproduct error cross-correlations, thus minimizing violation of TC assumptions.
In addition, when we assimilated the SMAP ascending and descending data at their respective overpass times, we assumed that both ascending and descending SMAP data were of reliable quality for data assimilation because we only employed SMAP data that indicated good quality. However, it is worth noting that SMAP ascending and descending data have different error structures which can impact the data assimilation process. In a future study, considering the different error statistics of different SMAP overpass times may further improve the performance of assimilated soil moisture into LSMs.
4. Conclusion
The present research investigates the usefulness of CYGNSS daily and subdaily scale soil moisture estimates through the assimilation of surface soil moisture into the Noah-MP LSM. In the assimilation system, we present a quantitative evaluation of global-scale relative error characteristics in four CYGNSS- and SMAP-assimilated soil moisture data sets based on TCA. The results clearly show that the assimilation of subdaily scale soil moisture estimates from CYGNSS and SMAP provides improvements in surface-level soil moisture predictions in the Noah-MP LSM. We also found that the SMAP-only assimilation scheme could improve 61.3% of assimilation-available areas, while 42.6% of areas were improved by the additional implementation of daily or subdaily CYGNSS products with SMAP data. Although SMAP-only assimilation works better than CYGNSS-only assimilation, this result implies that 42.6% of areas could not have been improved without the CYGNSS mission. Furthermore, we also demonstrated that the choice for data assimilation from sub daily- or daily-scale CYGNSS soil moisture, SMAP, or CYGNSS + SMAP, with respect to different land cover conditions could potentially improve/degrade the quality of soil moisture estimates from the Noah-MP LSM.
In the present study, we only showed the improvement of surface-level soil moisture variables that we gained from the Noah-MP LSM by assimilating frequent soil moisture estimates from CYGNSS and SMAP. In a future study, other hydrological variables (i.e. water balance components and subsurface state variables) from assimilated LSM outputs such as total evapotranspiration, surface runoff, soil temperature, root-zone soil moisture, etc, can be analyzed. For example, investigating the impact of frequent soil moisture assimilation on near-real-time peak discharge prediction can be useful in flood forecasting research. Such LSM output variables will be available from the authors upon request (https://hyunglok-kim.github.io/data).
Acknowledgments
The authors thank the teams from NASA, ESA, and UCAR/UC for making their data sets publicly available; Hyunglok Kim acknowledges the Future Investigators in NASA Earth and Space Science and Technology (FINESST) under Award #80NSSC19K1337, the Bicentennial Fellowship from the Department of Engineering Systems and Environment at the University of Virginia, and the AGU Horton Grant. We would also like to thank Research Computing at the University of Virginia, Charlottesville, VA, USA, for providing computational resources and technical support that have contributed to the results reported within this publication (https://www.rc.virginia.edu). Hyunglok Kim would like to thank Dr. Holcomb Katherine and Dr. Ruoshi Sun for their assistance.
Data availability
Data supporting the conclusions of this study are properly cited and publicly available. SMAP L2 and IGBP land classification data sets are available at https://nsidc.org/data/SPL2SMP/versions/7. ASCAT data is available at https://land.copernicus.vgt.vito.be/. SMOS-IC data is available at https://ib.remote-sensing.inrae.fr/. Land Information System Framework (LISF) source codes are available at https://github.com/NASA-LIS/LISF;
The CYGNSS data that support the findings of this study are openly available at the following URL/DOI: https://doi.org/10.5067/CYGNU-L3SM1.
Data distribution
The CYGNSS and SMAP assimilated soil moisture data are available from the authors on request (https://hyunglok-kim.github.io).