
Abstract
Magneto-active structures with non-contact actuation, precise controllability, strong penetrability, and biological harmlessness have wide application prospects in the fields of soft robots, bionic engineering, medical treatment, and flexible transmission, among others. This paper presents the design of a magneto-active shape memory polymer (MASMP) based on a blending matrix of polycaprolactone and thermoplastic polyurethane. The aim is to enhance the environmental adaptability, manufacturability, and diversification of actuation modes of magnetic-active actuators. We conducted an analysis of the magnetic/thermal switchable mechanical properties and shape memory properties of MASMP. The results demonstrate excellent shape fixation and shape recovery rates, as well as excellent flexibility and magnetorheological effects. We fabricated flexible printing filaments with a uniform diameter by using a screw extruder, which enables high-precision 4D printing for MASMP. We printed several magneto-active structures, which demonstrated variable stiffness, shape-morphing, and shape memory capabilities. The shape-morphing performance is in good agreement with the simulation results of the design process. Furthermore, we successfully printed and assembled a flexible claw that exhibits an effective grasping and release function activated by a magnetic field. Finally, we developed a magneto-active structure with negative Poisson's ratio, showing great potential for application in metamaterial structure.
Export citation and abstract BibTeX RIS
1. Introduction
Soft actuators are typically consist of flexible and sensitive materials capable of responding to various external stimuli, such as heat [1], air pressure [2], light [3], electric field [4], and magnetic field [5]. The flexibility of the body enables infinite degrees of freedom and continuous deformation, as well as good environmental adaptability and safe human–computer interaction [6]. These advantages bring a wide range of applications to artificial muscle, intelligent clothing, bionic robots, biomedicine, and other fields [7–11]. Different actuation methods with distinct characteristics and advantages determine the operating range, structural form, energy supply, and other properties of the soft actuator. Among these methods, the use of a magnetic field offers unparalleled advantages in specific environments, particularly closed spaces, due to its non-contact control property. Furthermore, magnetic field exhibits excellent penetrability and biologically harmless, and can be accurately and reversibly controlled by the current in the coil. These unique advantages have attracted many scholars to develop magneto-active structures for a variety of applications [12–15].
The actuation properties of magneto-active structures mainly depend on the magneto-deformation behavior associated with uniform magnetization profiles. The design of magnetization profiles can be achieved by incorporating either hard or soft magnetic particles into the polymer matrix. Hard-magnetic particles possess a large hysteresis loop, high coercivity, and remanence, thereby enabling the manipulation of local remanence in structures under high magnetic fields. Unbalanced magnetic forces based on anisotropic local remanence result in diverse and programmable magneto-deformation of structures [16, 17]. This micro torque system has been employed in various applications, including the creation of folding and morphing soft robots [18], crawling turtles [19], structures with negative Poisson's ratio [20], and soft robots with multimodal motion [21], among other applications [22, 23]. These materials demonstrate rapid response and complex deformation characteristics.
Compared to hard magnetic materials, soft magnetic materials exhibit a smaller hysteresis loop, providing excellent control robustness and repetitive stability even subjected to strong magnetic fields and significant mechanical loads. The pre-structuring process involves applying a magnetic field during the curing of structures, which immobilizes the magnetic particle chains within the cured matrix. When an external magnetic field is applied, the particle chains are driven by the magnetic torque in the direction of the magnetic field. This phenomenon serves as the underlying mechanism for the magneto-deformation observed in soft-magnetic structures [24]. The utilization of this magnetic torque, based on anisotropic particle chains structures, has demonstrated the ability to design magneto-deformations. Consequently, various soft actuators based on soft magnetic materials have been developed, exhibiting significant potential for diverse applications [6, 25–28]. Despite possessing high control precision and robustness, soft-magnetic structures face challenges in accurately designing uniform magnetization profiles based on chain structures. This limitation significantly restricts the modes and types of magneto-deformation achievable. Compared with hard magnetic materials, the realization of complex and diverse magneto-deformations remains a significant challenge.
Shape memory polymers (SMPs) are a type of smart material that possess the ability to remember their original shape, retain temporary shapes, and subsequently recover their initial form upon exposure to external stimuli such as heat, light, and solvents [29–33]. SMPs offer a range of stimulus response forms and can exhibit large deformations, making them highly promising for numerous applications [34, 35]. Notably, when combined with 3D printing technologies, SMPs enable the realization of 4D printing, where structures dynamically respond to external stimuli [36–39]. Various 3D printing methods, including fused deposition modeling (FDM), stereolithography apparatus, digital light processing, direct ink writing, and selective laser sintering, can be employed for printing SMPs, with FDM being the most popular due to its cost-effectiveness and accessibility [40]. Researchers have successfully used FDM-based 4D printing to fabricate a wide range of structures [41, 42], including biological tracheal stents [43], deployable materials and devices [44], elbow protectors [45], and left atrial appendage occluders [46]. The excellent shape memory performance and 3D printability of SMP present a promising strategy for enhancing the designability and diversity of magneto-deformation in soft magneto-active structures. Incorporating soft magnetic particles into SMPs allows for the fabrication of a wide variety of soft magnetic structures utilizing 3D printing technology. This integration enables the realization of diverse magneto-deformations through magneto-thermal coupling actuation, further facilitating the creation of personalized devices with enhanced deformation capabilities.
Therefore, in this study, a magneto-active SMP (MASMP) has been synthesized using a blend of polycaprolactone (PCL) and thermoplastic polyurethane (TPU) as the matrix, with the incorporation of soft magnetic particles as fillers. The fabrication method has been optimized based on the approach outlined in our previous publication [47]. Comprehensive characterization of the MASMP has revealed exceptional thermodynamic and shape memory properties, with shape fixation and recovery rates exceeding 95%. Additionally, the material exhibits outstanding flexibility and magnetorheological (MR) properties. Using 4D printing technology, various magneto-active structures have been successfully printed, demonstrating the material's capability for shape deformation, shape memory, and variable stiffness. This research significantly contributes to the advancement of magneto-active structures and holds vast potential for applications in various fields, including biomedicine and intelligent flexible robotics. Furthermore, a flexible claw has been printed and assembled, demonstrating effective grip activation through the implementation of a magnetic field. This research contributes to the advancement of magneto-active structures and has extensive potential for applications in various fields, including biomedicine and intelligent flexible robotics.
2. Materials and experiments
2.1. Materials
TPU (C85A10/ BASF Germany) and PCL (Perstorp (Ingevity) 6800, Sweden) were provided by Dongguan Zhangmutou Huachuang Plastic Co., Ltd. The carbonyl iron particles (CIPs, 6 μm average diameter) were purchased from BASF in Germany. All materials were dried at 40 °C for 12 h prior to use.
2.2. Fabrication of MASMP
The dried powder was mixed evenly and then poured into the mixer for high temperature mixing for 2 h, with the temperature set at 180 °C and the speed at 3 r s−1. The resulting material was then fragmented into irregular particles with an average diameter of 3 mm. Subsequently, the particles were added into the uniaxial extruder and passed through three heating sections to form filaments through the cooling system and traction device. The diameter of filament was regulated to 1.75 ± 0.1 mm by adjusting the coordination between the traction speed and the extrusion speed.
2.3. Characterization
The mechanical performance of a single cantilever sample in oscillation mode was analyzed using a dynamic mechanical analyzer (DMA, TA). The temperature was increased from 30 °C to 95 °C at a rate of 5 °C min−1, with a constant frequency of 1 Hz. A tensile test was conducted using universal testing machine (ctm2100), with a tensile speed of 5 mm min−1. The ASTMD638 typeⅠ specimen was printed by 3D printer (HORI Z300), and each mixed sample underwent three measurements. The shape recovery experiment was schematically illustrated in figure S1, and the test calculation method was referenced from the literature [35]. The shape fixation rate ( ) and shape recovery rate (
) and shape recovery rate ( ) were averaged from the three measurements. The MR properties of the material were measured by Anton Paar MCR301. A round sample with a diameter of 20 mm and a thickness of 2 mm, printed by a 3D printer, was utilized. To assess the magnetic response time and the magnetic control repeated stability of the materials, a test system was constructed, comprising a laser displacement sensor (LK-H025), slide rail (LD4575-400), and data recorder (MDR-80), as shown in figure S2.
) were averaged from the three measurements. The MR properties of the material were measured by Anton Paar MCR301. A round sample with a diameter of 20 mm and a thickness of 2 mm, printed by a 3D printer, was utilized. To assess the magnetic response time and the magnetic control repeated stability of the materials, a test system was constructed, comprising a laser displacement sensor (LK-H025), slide rail (LD4575-400), and data recorder (MDR-80), as shown in figure S2.
2.4. 3D printing of magneto-active structures
The filament was inserted into the FDM3D printer (HORI Z300), which had a printing platform of 300 * 260 * 300 mm, and a nozzle diameter of 0.4 mm. The printing temperature was set at 180 °C, while the speed was set at 10 mm min−1. Subsequently, line structures, rectangular structures, and spider-like structures were printed individually to observe and evaluate their shape memory effect. Additionally, a flexible claw was printed and assembled to investigate its snach function activated by a magnetic field.
3. Result and discussion
3.1. Analysis of magneto-thermo-mechanical properties
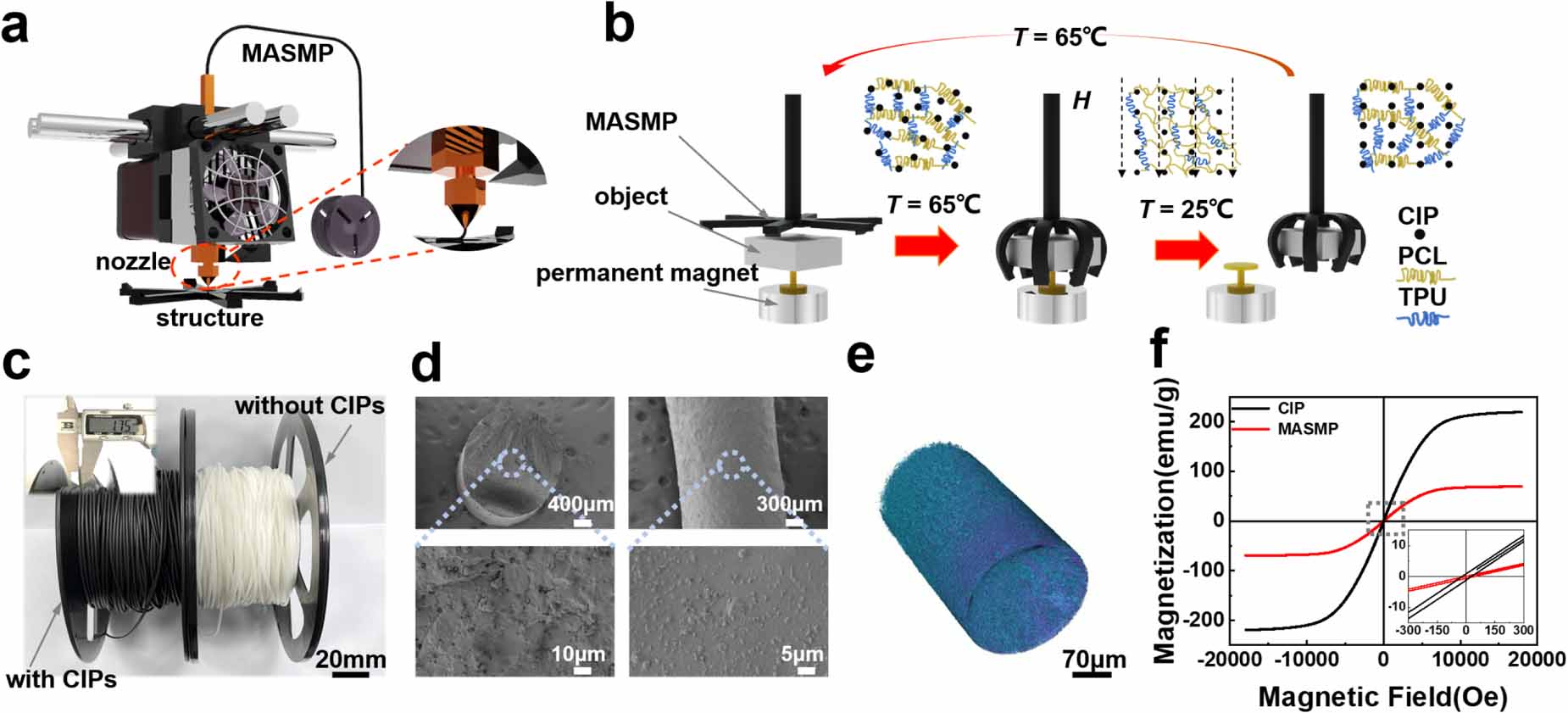
Figure 1 illustrates the schematic diagram of 4D printing and the macroscopic and microscopic characterization of the printed filaments. In figure 1(a), a 1.75 mm filament is fed into the printer and guided by the gear to the nozzle, which has a diameter of 0.4 mm and is set at a temperature of 180 °C. As the extrusion process takes place, the filaments are deposited and layered, gradually forming the desired structure under the guidance of the nozzle.
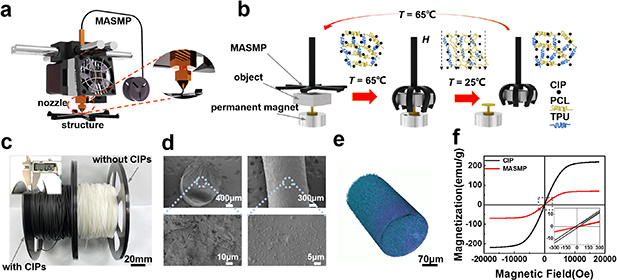
Figure 1. 4D printing schematics and macro- and microscopic characterization of materials. (a) Schematic diagram of the nozzle part of the printer. The printing filaments are extruded by the nozzle and then stacked layer by layer. (b) Grasping and releasing schematic diagram of magneto-driven flexible claw. T is temperature, the mixture of PCL and TPU has shape memory, which transform temperature is 60 °C. (c) Physical display of MASMP filaments with CIP (left) and without CIP (right). (d) Scanning electron microscope (SEM) images of the MASMP filament. (e) Computed tomography (CT) image of MASMP filament. (f) Magnetization curves of CIP and MASMP filament.
Download figure:
Standard image High-resolution imageFigure 1(b) illustrates the fundamental principle underlying the deformation and recovery process of structures fabricated using MASMP. When subjected to a magnetic field, the MASMP structure undergoes deformation, which automatically reverts back to its original shape upon removal of the magnetic field. At temperatures below the melting temperature of PCL (60 °C), the crystalline state of PCL exhibits high stiffness, limiting the deformation of MASMP in the presence of a magnetic field. During this stage, neither the TPU as network points nor PCL as the transition segment has reached its respective melting point, resulting in restricted molecular chain movement and fixed CIP, which cannot drive deformation. When heated above 60 °C, MASMP softens, enabling significant deformation under a magnetic field. This is because the state of TPU in MASMP remains unchanged, while PCL changes from a crystalline state to a molten state. Consequently, molecular chain motion intensifies, and the CIP aligns under the magnetic field, facilitating magneto-deformation. Subsequently, by maintaining the magnetic field and cooling to 25 °C, the PCL reverts to its crystalline state, restricting molecular chain motion and fixing the structure in a temporary shape. At this stage, the energy required to recover the deformation is stored in the TPU as a network point. Upon reaching a temperature of 60 °C, the TPU releases the stored energy, restoring the structure to its original shape.
Figure 1(c) illustrates the visual appearance of the printed filaments, with the black filaments containing 30 wt% CIP in MASMP and the white ones representing pure SMP. The diameter of both filaments, measured by a digital vernier caliper (BS159020), was determined to be 1.75 ± 0.1 mm, meeting the requirements for the diameter of consumables for commercial FDM printers. Figure 1(d) presents the SEM image of the cross section and surfaces of the MASMP filament, demonstrating the uniform dispersion of CIP within the matrix, thus ensuring the uniformity of the printed structure. The 3D microstructure of the filament, observed by CT, is shown in figure 1(e), which reveals that CIP are uniformly distributed throughout the matrix, exhibiting good overall uniformity. Figure 1(f) presents the magnetization curves of CIP and MASMP filament. The saturation magnetization of CIP and MASMP were 219 and 69 emu g−1, respectively. The remanent magnetization and coercivity were almost zero and barely observable in the enlarged graph. These excellent soft magnetic properties confer upon MASMP desirable repeatability and control robustness under magnetic actuation.
A comprehensive evaluation of mechanical and rheological properties was conducted, and the results are presented in figure 2. Figure 2(a) illustrates the relationship between the storage modulus and temperature of MASMP with different CIP content. The storage modulus of MASMP decreases with increasing temperature and changes sharply at 60 °C, which corresponds to the melting point of PCL in MASMP. Moreover, at 30 °C, the storage modulus of MASMP increases with increasing CIP content. However, above 65 °C, the storage modulus decreases with increasing CIP content. This behavior can be attributed to the solidification of CIP within the material at 30 °C, reinforcing the structure. Conversely, as the temperature rises above 65 °C, the PCL matrix begins to melt, allowing the CIP to move freely within the matrix, no longer providing reinforcement. At this point, the storage modulus becomes primarily dependent on the matrix, and an increase in CIP content leads to a decrease in matrix proportion and storage modulus. Notably, the material exhibits excellent flexibility, as evident from the order of magnitude of the storage modulus. The transition temperature ( ) of SMP is typically equivalent to the glass transition temperature (
) of SMP is typically equivalent to the glass transition temperature ( ). Figure 2(b) illustrates the relationship between temperature and loss factor, with the peak temperature indicating the
). Figure 2(b) illustrates the relationship between temperature and loss factor, with the peak temperature indicating the  of the material. The
of the material. The  values of MASMP with CIP contents ranging from 30 wt% to 0 wt% were measured as 61.3 °C, 62.8 °C, 62.6 °C, and 61.0 °C, respectively. It is evident that the variation in CIP content has a minimal effect on the
values of MASMP with CIP contents ranging from 30 wt% to 0 wt% were measured as 61.3 °C, 62.8 °C, 62.6 °C, and 61.0 °C, respectively. It is evident that the variation in CIP content has a minimal effect on the  of the MASMP. This is because a small amount of CIP has little influence on the melting and crystallization of PCL, while
of the MASMP. This is because a small amount of CIP has little influence on the melting and crystallization of PCL, while  (
( ) mainly depends on the melting temperature of PCL.
) mainly depends on the melting temperature of PCL.

Figure 2. Magnetic, thermal and mechanical properties of MASMP with different CIP content. DMA measurement results of storage modulus (a) and loss factor (b) in the temperature range of under 30 °C–95 °C. The curve inserted in (a) is an enlarged view of the initial storage modulus. (c) Tensile stress–strain curve of MASMP. (d) The relationship between storage modulus and magnetic flux density. (e) Variation of storage modulus with magnetic flux density at different temperatures. (f) Shape memory properties of MASMPs with different CIP content.
Download figure:
Standard image High-resolution imageThe tensile properties of the MASMP are presented in figure 2(c). The tensile strength and elongation at break of MASMP with CIP content of 30 wt%, 20 wt%, and 10 wt% were measured as 8.9 MPa, 31.1%, 8.4 MPa, 101.0%, and 8.1 MPa, 252.8%, respectively. It is evident that the increase of CIP content will slightly enhances the tensile strength of the material, but significantly reduces the elongation at break. Furthermore, the addition of CIP has a notable impact on the MR properties of the material, as illustrated in figure 2(d). As the content of CIP is increased, the MR effect of the material is improved. Particularly, the MR effect of MASMP containing 30 wt% of CIP reaches 13.6%. The calculation method for determining the MR effect is as follows:

Here,  is the initial storage modulus,
is the initial storage modulus,  is the maximum storage modulus under variable applied magnetic fields. To ensure good flexibility and MR performance of the material, subsequent experiments utilized MASMP with a CIP content of 30 wt%. Since the mechanical properties of SMP are closely influenced by temperature, we tested the MR properties of 30 wt% MASMP at different temperatures, as illustrated in figure 2(e). At a temperature of 25 °C, the MR effect of the sample is 8.9%. However, as the temperature increases, the maximum MR effect reaches 36.9%. This observed increase can be attributed to the intensified movement of molecular chains within the MASMP sample at higher temperatures, facilitating better alignment of the CIP and improving the magnetic-induced modulus. Additionally, the reduction in the initial modulus also plays a significant role in this phenomenon.
is the maximum storage modulus under variable applied magnetic fields. To ensure good flexibility and MR performance of the material, subsequent experiments utilized MASMP with a CIP content of 30 wt%. Since the mechanical properties of SMP are closely influenced by temperature, we tested the MR properties of 30 wt% MASMP at different temperatures, as illustrated in figure 2(e). At a temperature of 25 °C, the MR effect of the sample is 8.9%. However, as the temperature increases, the maximum MR effect reaches 36.9%. This observed increase can be attributed to the intensified movement of molecular chains within the MASMP sample at higher temperatures, facilitating better alignment of the CIP and improving the magnetic-induced modulus. Additionally, the reduction in the initial modulus also plays a significant role in this phenomenon.
Compared to other magneto-active materials, MASMP exhibits shape memory properties. Figure 2(f) illustrates the relationship between the CIP content and the  and
and  of MASMP. The results demonstrate that MASMP has excellent shape memory performance, with the
of MASMP. The results demonstrate that MASMP has excellent shape memory performance, with the  and
and  values of the materials with various CIP contents exceeding 95%. Additionally, the change in CIP content has minimal effect on the shape memory performance of MASMP, as the differences are within the third decimal place. Furthermore, in the case of light heating, the increase in CIP content can reduce the time required for recovery, as demonstrated in figure S1. This can be attributed to the fact that CIP enhances the color depth of the material and absorbs light heat more efficiently than the white pure SMP.
values of the materials with various CIP contents exceeding 95%. Additionally, the change in CIP content has minimal effect on the shape memory performance of MASMP, as the differences are within the third decimal place. Furthermore, in the case of light heating, the increase in CIP content can reduce the time required for recovery, as demonstrated in figure S1. This can be attributed to the fact that CIP enhances the color depth of the material and absorbs light heat more efficiently than the white pure SMP.
3.2. 4D printing of MASMP
Various structures have been successfully 3D printed to demonstrate the feasibility of 4D printing, as shown in figure S3. The printed structures exhibit a smooth surface and uniform material distribution, confirming their compatibility with FDM 3D printing technology. In figure 3, the simulation and experimental results of deformation and recovery for three distinct structures are presented. Precise design of flexible actuators using soft magnetic materials is crucial to achieve complex deformation, which is often limited in their deformation capability. However, when materials possess shape memory properties, complex initial shapes can be directly designed, 3D printed, and deformed into temporary shapes by a simple magnetic field. This property enables the realization of complex deformations using shape memory. Based on this concept, we designed three different structures and demonstrated their magneto-deformation and thermal recovery performance.

Figure 3. Deformation and recovery capability and finite element simulation of various MASMP structures. Magnetic field (a) and magneto-active deformation (b) simulation of 'MR'. Magneto-active deformation (c) and heating recovery (d) experiment of 'MR'. Magnetic field (e) and magneto-active deformation (f) simulation of rectangular structure. Magneto-active deformation (g) and heating recovery (h) experiment of rectangular structure. Magnetic field (i) and magneto-active deformation (j) simulation of spider-like structure. Magneto-active deformation (k) and heating recovery (l) experiment of spider-like structure. Scale bars are 10 mm and all simulations are completed by COMSOL, and the deformation is carried out at 65 °C. The high temperature is simulated by reducing the material modulus. The surface magnetic flux density of the permanent magnet in simulation and experiment is 350 mT, and the direction is shown by the dense arrow in the figure. The magnetic flux density and stress are represented by color legend.
Download figure:
Standard image High-resolution imageFigures 3(a)–(d) show the print structure of the MR. Figures 3(a) and (b) depict its finite element simulation, which shows that the 'MR' structure is stretched under the effect of the gradient magnetic field at 65 °C. The simulation takes into account the softening of the material at high temperatures by reducing the storage modulus of MASMP. In figure 3(c), we successfully 3D print the 'MR' structure, capturing it in its initial state. After heating to 65 °C, tweezers are used to clamp 'MR' and move it to a permanent magnet (100 * 100 * 50 mm). Under the influence of the magnetic force, the 'MR' structure stretches into a straight line. The magnetic field is maintained until the structure cools to 25 °C. At this stage, the 'MR' structure is fixed into a temporary 'line' structure. Figure 3(d) shows that upon raising the temperature back to 65 °C, the temporary structure recovers to original 'MR' shape due to the shape memory effect. The process of shape recovery takes 21 s, as visually depicted in video 1.
Figures 3(e)–(h) demonstrate the deformation and restoration of a rectangular structure. Figures 3(e) and (f) illustrate the simulation analysis of a rectangular structure with bending under a gradient magnetic field. At a magnetic flux density of 350 mT from the permanent magnet, the curved rectangular structure stretches and takes on a strip-like shape. Similarly, we print a curved rectangular structure and apply a driving magnetic field after heating. The magnetic field is maintained until the structure cools down to 25 °C, thereby fixing it in the temporary shape, as shown in figure 3(g). Figure 3(h) demonstrates that the strip shape structure reverts back to its original bending structure after being heated to 65 °C again, which takes 49 s. Furthermore, we designed and printed a 3D spider-like structure, as shown in figures 3(i)–(l). Figures 3(i) and (j) illustrate the simulation analysis of spider-like structure under a gradient magnetic field. It is evident that the spider legs located further from the body experience a stronger magnetic field and a greater force, while the ones near the body encounter a weaker magnetic field and a smaller force. Under the magnetic field, the eight spider legs straighten out, and the entire spider structure contracts into a bunch, as shown in figure 3(k). Figure 3(l) reveals that the spider-like structure returns to its initial shape upon being reheated to 65 °C, with a restoration time of 32 s. This process can be observed in video 1, available in the supplementary materials.
The deformation behavior of the three structures are in good agreement with the simulation, indicating that finite element simulation can effectively guide actuator design and predict actuation deformation. The above three structures easily transformed into a temporary state through a simple magnetic field, and the temporary state can be restored to the initial state through heating. This greatly reduces the difficulty of structure design of soft magnetic actuators, and enhances the diversity and complexity of its magneto-deformation. Moreover, the existence of two stable states can also expand the potential applications of the actuators based on MASMP.
3.3. Design and manufacture of flexible claw
Combining the shape memory and magneto-active performance of MASMP, we have designed a flexible claw shown in figure 4. Finite element simulations have been carried out to investigate the magneto-deformation activated by the magnetic field, as illustrated in figures 4(a) and (c). As the permanent magnet approaches the flexible claw, the magnetic field near the claw intensifies, resulting in an increased surface strain. When the permanent magnet is positioned completely beneath the flexible claw, the six grippers of the claw experience a uniform downward force, causing them to bend and securely grasp the object. The grasping experiment of the flexible claw is shown in figure 4(b), where the flexible claw is heated to 65 °C and placed over the target object. By moving a circular permanent magnet closer to the claw, the magnetic field deforms the flexible claw and encase the object. The deformation is retained until the claw cools down to 25 °C, resulting in the claw being secured in a temporary shape. The recrystallization of the PCL molecular chain improves the storage modulus of the claw to 80 MPa, ensuring a great gripping force. When the temperature is raised to 65 °C again, the flexible claw returns to its initial state based on its shape memory behavior and releases the grasped object, as shown in figure 4(d).
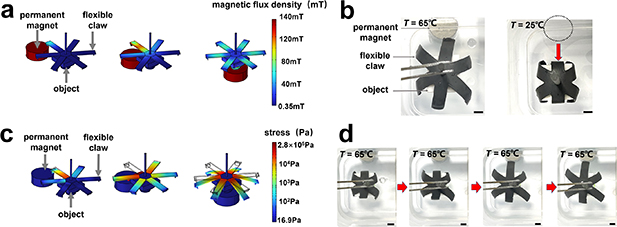
Figure 4. The snatching function of a flexible claw based on MASMP. (a) Finite element simulation of magnetic field via COMSOL. The magnetic flux density is indicated by the color legend. (b) Grabbing behavior of flexible claws activated by a permanent magnet. (c) Finite element simulation of magnetic field via COMSOL. The stress is indicated by the color legend. (d) Release behavior of the flexible claws in the absence of magnetic field and at 65 °C. Scale bars are 10 mm.
Download figure:
Standard image High-resolution imageThe flexible claw can effectively adapt to the shape of the object, allowing for successful grasping and releasing without causing any damage to the object's surface. The detailed capture and release operations can be observed in video 2.
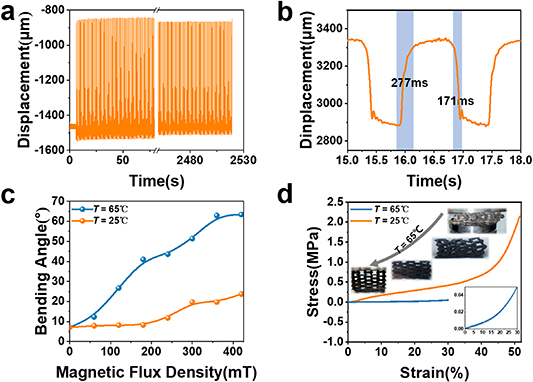
The stability test for the bending performance of the flexible claw is presented in figure 5(a). After 1500 times of deformation, the displacement curve shows no significant changes, indicating good stability of the claw. The deformation and recovery response times of bending at 25 °C are 277 and 171 ms respectively, as illustrated in figure 5(b). The response time is defined as the time taken to reach 95% of the upper or lower edge. The quick response ensures the effective actuation behavior of the flexible claw. The magneto-deformation of the flexible claw at 25 °C and high temperature (⩾ ) is demonstrated in figure 5(c). At 25 °C, the bending angle caused by magneto-deformation is small, typically less than 20°. This resistance to deformation ensures its grasping ability in the temporary state. However, at 65 °C, the thermoplasticity of the matrix causes the body of the claw to soften, resulting in a significantly increased bending angle. This enhanced flexibility enables the claw to exhibit excellent grasping ability, combining flexibility, adaptivity, and harmlessness for capture object.
) is demonstrated in figure 5(c). At 25 °C, the bending angle caused by magneto-deformation is small, typically less than 20°. This resistance to deformation ensures its grasping ability in the temporary state. However, at 65 °C, the thermoplasticity of the matrix causes the body of the claw to soften, resulting in a significantly increased bending angle. This enhanced flexibility enables the claw to exhibit excellent grasping ability, combining flexibility, adaptivity, and harmlessness for capture object.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 5. Magneto-deformation and mechanical properties of the magneto-active structure based on MASMP. (a) Cyclic test of magneto-deformation. The time for each cycle is 1.5 s, and it includes the transient increase and decrease of the magnetic field. The transient magnetic field is generated on the basis of the motion of the permanent magnet controlled by a linear motor. (b) Single-period curve of magneto-deformation under transient magnetic field. (c) Relationship between bending angle and magnetic flux density. (d) The compression stress–strain curve of the magneto-active structure with negative Poisson's ratio, at 65 °C, the structure is restored from the compressed state to the initial state.
Download figure:
Standard image High-resolution image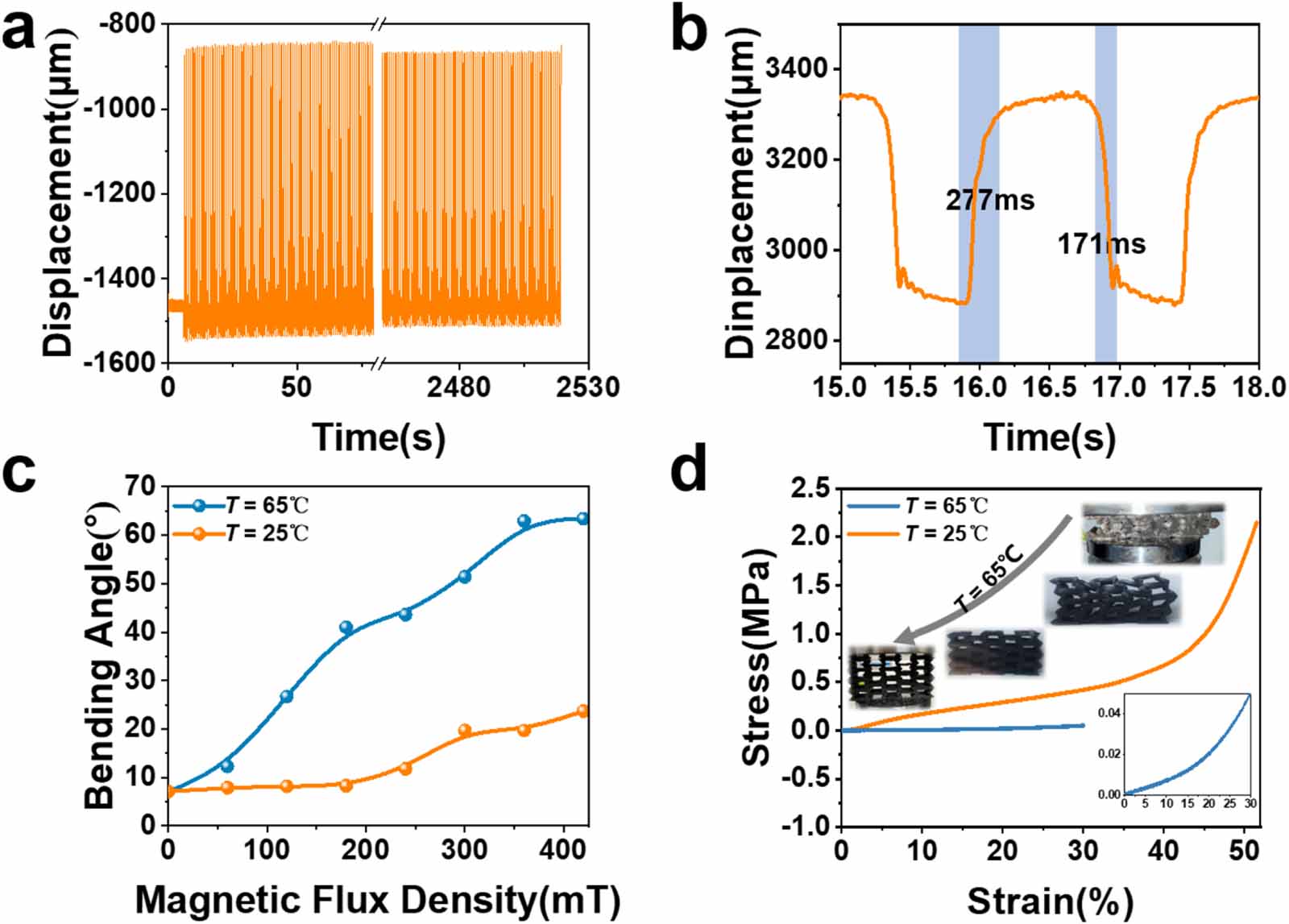{kind=link}
In order to further explore the potential applications of MASMP, we have designed and printed a magneto-active structure with negative Poisson's ratio. The compression stress–strain curve of this structure is illustrated in figure 5(d). When the structure is compressed longitudinally, it exhibits transverse shrinkage deformation, characteristic of a negative Poisson's ratio structure. The stiffness of this structure at 25 °C and 65 °C is measured to be 57 kN m−1 and 3.92 kN m−1 respectively. Additionally, regardless of whether it is compressed at 25 °C or 65 °C, the structure can be heated to restore its original shape. The successful printing of this negative Poisson's ratio structure demonstrates the great potential of MASMP in the development of metamaterial structures. It widens the possibilities for designing flexible drive structures, opening up new avenues for innovative applications.
4. Conclusion
In summary, this study presents the development of a MASMP based on a blending matrix of PCL and TPU. Our investigation focuses on characterizing the mechanical and shape memory properties of MASMP, which exhibit excellent shape fixation, recovery rates, flexibility, and MR effect. By fabricating printing filaments and employing a 4D printing system, we successfully demonstrate the magnetic-active behavior and shape memory capability of various MASMP structures. We validate the shape-morphing performance using simulations and experiments. As an exemplar application, we print and assemble a flexible claw that demonstrates the ability to efficiently grasp and snatch objects actuatived by a magnetic field. Furthermore, we design and fabricate a periodic cellular structure, which exhibits self-recoverability upon thermal stimulation. This work not only provides insights into harnessing the potential of MASMP but also offers an efficient approach for the development of a diverse range of magneto-active structures. Such advancements are crucial in applications related to soft actuators, metamaterials, and bionics, among others. The combination of magnetic and shape memory properties in MASMP opens up new possibilities for creating innovative and functional materials and structures.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant No. 52205088), Chongqing Natural Science Foundation (Grant Nos. CSTB2022NSCQ-MSX0933 and cstc2021jcyj-msxmX0103), and the Fundamental Research Funds for the Central Universities (2023CDJXY-041).
Data availability statement
All data that support the findings of this study are included within the article (and any supplementary files).