
Abstract
Storm surge generated from low-probability high-consequence tropical cyclones is a major flood hazard to the New York metropolitan area and its assessment requires a large number of storm scenarios. High-fidelity hydrodynamic numerical simulations can predict surge levels from storm scenarios. However, an accurate prediction requires a relatively fine computational grid, which is computationally expensive, especially when including wave effects. Towards alleviating the computational burden, Machine Learning models are developed to determine long-term average recurrence of flood levels induced by tropical cyclones in the New York metropolitan area. The models are trained and verified using a data set generated from physics-based hydrodynamic simulations to predict peak storm surge height, defined as the maximum induced water level due to wind stresses on the water surface and wave setup, at four coastal sites. In the generated data set, the number of low probability high-level storm surges was much smaller than the number of high probability low-level storm surges. This resulted in an imbalanced data set, a challenge that is addressed and resolved in this study. The results show that return period curves generated based on storm surge predictions from machine learning models are in good agreement with curves generated from high-fidelity hydrodynamic simulations, with the advantage that the machine learning model results are obtained in a fraction of the computational time required to run the simulations.
Similar content being viewed by others


Introduction
The New York metropolitan area, including New York City (NYC), Long Island, and the east coast of New Jersey (NJ), covers a region of narrow rivers, estuaries, islands, and sand barriers. Most of the region has an elevation that is less than 5 m above mean sea level1 which makes it vulnerable to storm surge flooding due to Tropical Cyclones (TCs). In the past 10 years, TCs Sandy in 2012 and Isaias in 2020 killed tens of people and damaged thousands of houses2,3,4. The damage to infrastructure caused interruptions to supplies of clean water, electricity, and transportation. These risks and damages are expected to become more pronounced in the future due to the expected increase in the intensity of TC, shift in their track, and potential change in their frequency in relation to climate change5,6,7,8,9,10,11,12,13,14,15,16,17,18,19.
Long-term mitigation and adaptation strategies to storm surge require quantifiable predictions of flood hazards under different scenarios while taking into consideration coastal development. These predictions are often presented in terms of a range of N-year return periods of a peak storm surge height defined as the height with 1/N percent chance of exceedance in any given year. In many coastal cities, a 10-year return period is used to assess impact of moderate storm surge scenarios that would cause temporary disruptions and minor damage to buildings. A 100-year return periods is used to assess the impact of extreme storm surge causing more significant damage over a broader coastal region. In countries and cities that are more prone to flooding, larger return periods are used to determine the design water level. In the Netherlands, 4000- and 10,000-year return periods are used for coastal flood defense works20. Because the peak storm surge increases with the return period, the higher return periods (low probability) correspond to higher storm surge (high-consequence event) while low return periods (high probability) correspond to lower storm surge (low-consequence event). For a reliable estimate of the N-year flood level one should consider \(10 \times N \times f\) storm scenarios21 where f represents the annual storm frequency. Ayyad et al.22 estimated that 600,000 storm scenarios will be required to reliably predict 1000-year return period when taking uncertainties associated with climate change into consideration.
Because the number of historical storms is limited and could not account for future changes, numerical model simulations of synthetic storms are usually used to determine storm surge levels. The most used hydrodynamic models include Sea, Lake, and Overland Surges from Hurricanes (SLOSH)23 and the coupled Simulating WAves Nearshore and ADvanced CIRCulation24 (ADCIRC + SWAN) models25,26. The high computational cost, which is significantly increased for high-resolution (street-level) hydrodynamic simulations, hinders the ability to perform the number of simulations required to predict low-probability high-consequence events. Alternatively, data-driven surrogate models, trained with physics-based simulations, can be used to effectively reduce this computational cost. Ayyad et al.22 demonstrated that the Artificial Neural Network (ANN) technique can be effectively combined with physics-based simulations to reliably predict storm surge on an ideal coast that did not consider variations in coastal features or how resolution requirements can impact their generalized approach. Richardson et al.27, and Das et al.28 developed regression and data-based algorithms to predict storm surge height by calculating a similarity index from the TC parameters and match it with an existing TC database. Ruckert et al.18 discussed different examples of probabilistic projections of sea level rise29,30,31,32. Others used shallow ANN models to predict surge levels due to synthetic or historical Typhoon data33,34,35,36,37. Hashemi et al.38 and Lee et al.39 used ANN models to respectively predict maximum water elevation and storm surge height time series on the basis of synthetic TCs. Tiggeloven et al.40 used different ANN model architectures to predict hourly surge time series prediction of the global tide and surge model forced using atmospheric variables. Other studies used kriging methods to predict storm surge height time series41,42,43. Yousefi et al.44 used machine learning models to predict snow avalanches, and floods using climatic, topographic, and morphological factors as the input variables. The aforementioned surrogate models have few limitations. In most of these studies, the storm parameters were defined at their time of landfall or were assumed to remain constant as the TC tracks, which is not the case in a real-life application. Also, the models mostly used small data sets, less than 1100 storms, for training, validating and testing the surrogate models, which impacts the accurate prediction of low probability events that are of high consequence.
In this study, we demonstrate the use of Machine Learning (ML) models to predict low-probability peak storm surge height due to TCs. We perform different feature selection techniques to generate a perfect ML model. We avoid all the aforementioned limitations and address the challenge of modeling low-probability high-consequence events. A large data set of more than 10,000 synthetic TCs is used without the need to assume that the TC parameters remain constant along its track. The peak storm surge height is calculated from synthetic TCs using the coupled ADCIRC + SWAN models. Also, TC parameters at the time of landfall and 6 h before and after landfall are used as the ML input features. Implementing this approach to four study sites in the NY metropolitan area allows for identification of differences in model predictions associated with specific coastal features.
Methods
Data set generation
Hydrodynamic model
The coupled ADCIRC + SWAN model is used to simulate storm surge height including the effects of wave-current interactions and variations in water depth. ADCIRC24,45 is a finite-element hydrodynamic model used to simulate free surface circulation and transport problems. In this study we used the two-dimensional depth-integrated version, referred as ADCIRC-2DDI. It solves the generalized wave-continuity and vertically-integrated momentum equation to calculate the free water surface elevation and depth-averaged velocities, respectively. In the current simulations, ADCIRC’s Holland hurricane model46,47 is used to calculate the wind and pressure fields. SWAN25 is a finite difference model used to simulate the generation, propagation, and dissipation of surface gravity waves in deep ocean and coastal waters. SWAN solves the wave action balance spectrum equation to calculate the phase-averaged wave characteristics, e.g., significant wave height. The source term in the governing equation includes input energy from wind, dissipation by bottom friction, wave breaking, and nonlinear wave-wave interactions48. ADCIRC + SWAN49 is a coupled model that is widely used by academia, industry, and state/federal government agencies (e.g., Dietrich et al.49, Xie et al.50, Marsooli and Lin51). The Federal Emergency Management Agency (FEMA) used the model to update the coastal inundation maps52. The U.S. Army Corps of Engineers (USACE) utilizes the model in its high profile projects53. The model is also used in state-of-the-art flood forecasting systems, e.g., the Coastal Emergency Risks Assessment (CERA) system, which is developed to forecast hurricane flooding along the U.S. East and Gulf Coasts (https://coastalrisk.live/). In the coupled approach, ADCIRC and SWAN share the same unstructured finite element mesh. ADCIRC interpolates the wind field over the computational vertices spatially and temporally to calculate water levels and currents. Using ADCIRC’s wind field, water level, and currents data, SWAN calculates wind-generated water wave spectrum. The radiation stress due to breaking waves is then passed to ADCIRC to predict water levels and currents.
Figure 1 shows the two dimensional computational mesh developed by a study from FEMA’s Region II office52. The mesh covers the Western North Atlantic ocean with longitudes between \(98^{\circ }\) and \(60^{\circ }\) W, and latitudes between \(8^{\circ }\) and \(46^{\circ }\) N. The spatial resolution in the shallow nearshore zone (depth less than 8 m) is about 80 m and gradually increases to eight kilometers at depth 80 m. In deep water, the spatial resolution reaches 100 km. The computational time step and horizontal eddy viscosity are set to 3 s and 50 m\(^2\)s\(^{-1}\), respectively. ADCIRC-2DDI accounts for the Coriolis force in the momentum equation to approximate the effect of planetary rotation on the storm surge. The bed roughness values (Manning’s n) coefficient varies spatially based on the land cover data54. The same roughness values are used in the wave model. The wind drag coefficient used in SWAN model is calculated using the method of Powel et al.55 with a cap of 0.0025. The computational time step in SWAN model is set to 15 min, which is also the coupling interval to the hydrodynamic model.

Computational mesh of the ADCIRC + SWAN model used in the present study. The study sites considered in this study are noted in the inset of the figure. The figure was generated using the AQUAVEO-SMS 13.1 software (https://www.aquaveo.com/software/sms-surface-water-modeling-system-introduction).
FEMA calibrated and validated the 2D ADCIRC + SWAN model output, i.e. maximum water elevation, using six historical tropical and extratropical events on the Northeast Coast54. The modeled peak water levels were compared against 218 high water mark readings from the six storms provided by the U.S. Army Corps of Engineers, and the NY Sea Grant publication Storm Surge56. The ADCIRC + SWAN model performance is considered to be acceptable if at least \(70\%\) of the comparisons for each storm shows a difference between the modeled and measured peak water levels less than 0.46 m. The validation results show that more than \(75\%\) of the comparisons for four storms, and more than \(60\%\) of the comparisons of the other two storms have peak water level differences that are less than 0.46 m. Also, the validation shows that the absolute average difference ranges between 0.25 and 0.39 m with an average value of 0.32 m. Given the uncertainties in hindcasting the storms including, data collection, and meteorological and topographic data, FEMA considers the model as capable to simulate both tropical and extratropical storm events. The mesh was also used by the New York City Panel on Climate Change (NPCC2) for modeling NYC coastal flooding57, and in other studies58,59,60,61.
In this study, we focus on four study sites, namely Battery, and Montauk in New York (NY), which respectively cover the New York Harbor (NYH) and the entrance of long island sound, and Atlantic City and Beach Haven West in New Jersey (NJ), which respectively represent the open coast and back bay of NJ shoreline. The locations of the four stations are noted in the inset of Fig. 1.
Storm scenarios
The synthetic TCs used in this study are based on the TC data sets from Marsooli et al.62. Each data set contains thousands of TCs generated by the statistical/deterministic TC model of Emanuel et al.63 for the Atlantic basin. The TC model generates synthetic TCs for specific large-scale atmospheric and oceanic conditions based on observations or climate models. The chosen data sets included 27,800 synthetic TCs. Of these, 23, 412 impacted the geographical area covered in this study. To determine the low-probability high-consequence (impactful storm surge) at an acceptable computational cost, we firstly simulated all 23, 412 TCs using ADCIRC only with relatively low spatial and temporal resolutions. From these simulations, we identified 1300 TCs as low-probability events that caused peak storm surge heights more than 0.5 m at the considered study sites. To complete the training data set, we randomly selected another 9000 TCs and added them to the 1300 TCs. High-fidelity ADCIRC + SWAN simulations of the 10,300 TCs were then performed to determine the peak storm surge height. The generated data set from these simulations was then used to train, validate and test the ML models.
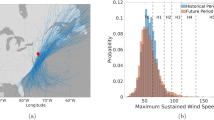
Measuring the TC impact at a study site requires a definition of its intensity which is represented by its maximum sustained wind speed (\(V_{max}\)). Because this speed varies as the TC tracks along a specific path, we define the TC intensity by its maximum sustained wind speed when it is closest to a study site. Based on this definition, histogram of the maximum sustained wind speed for the Battery station, based on the 10, 300 TCs, is presented in Fig. 2b. The plot shows that the maximum sustained wind speed follows a normal distribution with a mean value of 60 Knots. Figure 2a shows the histogram of the minimum distance between the TC eye and the Battery (\(d_{min}\)) of the whole data set. The plot shows that the minimum distance is uniformly distributed between 0 and 350 km. The histogram of the corresponding peak storm surge height calculated by ADCIRC + SWAN is presented in Fig. 2c. The plot shows that the peak storm surge height follows a right skewed distribution with a mean value of 0.26 m and a median value of 0.17 m. Only 1500 TCs, i.e. about \(15\%\) of the simulated TCs, generated a peak storm surge height more than 0.5 m. Clearly, the data set is imbalanced and biased more to the smaller peak storm surge heights, which biases the trained ML model when considered as one set. The bias can be reduced by splitting the data set into smaller ones that are less biased. We used \(d_{min}\) to split the data set as it has the highest impact on the peak storm surge height, as shown in the following section. Figure 3 shows a scatter plot between the minimum distance and corresponding peak storm surge height, which is used to choose the threshold value of \(d_{min}\). As shown in the plots, the peak storm surge height decreases as \(d_{min}\) increases to approach an asymptote with a value less than 0.5 m beyond \(d_{min} = 100\) km. Also, the plots show that for \(d_{min}\) more than 100 km, the peak storm surge height dropped to less than 1 m at the Battery and Montauk, and 0.5 m in Atlantic City and Beach Haven. This also can be seen from the histograms of peak storm surge height for TCs that pass within and outside a radius of 100 km from the Battery station as shown in Fig. 2d,e, respectively. The 3650 TCs that pass within a radius of 100 km have a maximum peak storm surge height of 2.14 m, while the 6650 TCs that pass outside a radius of 100 km have a maximum peak storm surge height of 0.89 m. The histogram plot Fig. 2d also shows that almost \(50\%\) of the TCs that pass within the 100 km radius generate a storm surge peak larger than 0.5 m. Based on these histograms, we divide the data set into two smaller ones, namely DS-1 and DS-2 that respectively include TCs that pass within and outside a radius of 100 km from the study site to realize balanced data sets for training the ML models.

Histograms of the (a) minimum distance between TC eye and the study site, (b) sustained maximum wind speed when the TC is closest to the study site for the full data set, peak storm surge height for (c) the full data set, (d) TCs that pass within 100 km (DS-1), and (e) TCs that pass outside the 100 km region (DS-2). All histograms are for the Battery station.

Scatter plots between the peak storm surge height calculated using the high-fidelity ADCIRC + SWAN simulations and the minimum distance between the TC eye and the study sites.
Data analysis and pre-processing
TC parameters
Different linear and nonlinear ML models are implemented to predict the peak storm surge height from the TC parameters, including intensity and track. In the following, the subscript i = 6, 0, and \(-6\), is used to denote the values of these parameters respectively at 6-h post, 0-, and 6-h prior to the time of the closest TC location to the study site. Six parameters are used to describe the TC at each time step. Its intensity is represented by the maximum sustained wind speed (\({V_{max}}_i\)), its size is represented by the radius of maximum wind (\({R_{max}}_i\)), and its track is represented by four values, namely the upper (\({lat_{upper}}_i\)) and lower (\({lat_{lower}}_i\)) latitudinal distance, and the right (\({lon_{right}}_i\)) and left (\({lon_{left}}_i\)) longitudinal distances. If the eye of the TC is on the right side (above) the point of interest, then the left longitudinal (lower latitudinal) distance is zero and the right longitudinal (upper latitudinal) distance is equal to the distance with a negative sign. If the TC’s eye is on the left side (below) the point of interest, then the right longitudinal (upper latitudinal) distance is zero and the left longitudinal (lower latitudinal) distance is equal to the distance with positive sign. An additional parameter is used to identify the TC track which is the minimum absolute distance between the TC eye and the study site (\(d_{min}\)). Thus, a total of 19 features (\(=\) six TC parameters \(\times\) three time steps \(+\) the minimum distance) are used as the ML models features.
Feature selection
Feature selection is conducted by calculating the correlation and degree of dependence of the peak storm surge height (\(\eta _{TC}\)) on the 19 features (\(X_i\)) using the correlation coefficient (R) and mutual information (MI) values64 that are respectively defined as:
where, cov(., .) and \(\sigma _.\) are, respectively, the covariance and standard deviation, \(D_{KL}\) is the Kullback-Leibler distance between two probability distributions, \(P\left( \eta _{TC},X_i\right)\) is the joint distribution of the peak storm surge height and each TC parameter, and \(P\left( \eta _{TC}\right)\) and \(P\left( X_i\right)\) are the corresponding marginal distributions. The linear correlation between peak storm surge height and TC parameters R has either a positive or negative value depending on whether they are positively or negatively correlated, respectively. The MI shows the nonlinear correlation, which is always positive and ranges from 0 to 1 signifying no and high dependence on the TC parameter, respectively.
The correlation coefficient and relative mutual information values between the peak storm surge height (calculated by ADCIRC + SWAN) and the 19 features for the two data sets are presented in Fig. 4. The color bars show the correlation coefficient and the bar plots shows the mutual information values. In both data sets, the maximum correlation of the peak surge height is \(d_{min}\). Figure 3 shows the high dependence of peak storm surge height to \(d_{min}\) where the surge decreases as \(d_{min}\) increases. Nearly the same level of correlation is noted between the peak storm surge height and \({V_{max}}_i\) in data set DS-1. The highest level of mutual information in data set DS-1 is noted to be between the peak surge height and \(d_{min}\). In data set DS-2, high values of mutual information are noted between the peak surge height and \(d_{min}\), \({lat_{upper}}_i\), \({lat_{lower}}_i\), \({lon_{right}}_i\), and \({lon_{left}}_i\). The effect of \(V_{max}\) on the peak storm surge height decreases as \(d_{min}\) increases65, which explains the high degree of dependence of this peak on the TC track. Therefore, stronger but farther hurricanes are less effective than weaker and closer ones.

Correlation coefficients (color bar) and relative mutual information values (bar plot) between the peak storm surge height and the 19 features of the two data sets.
In addition to identifying the parameters having the highest correlation with the peak storm surge height, the above two coefficients are used to remove features based on low correlation values. For that, we firstly neglected the features that have lowest R and MI. Then, we tested the different ML models using different combinations of TC parameters. We ended up with a total of 13 different features for each of the two data sets. The three \(R_{max}\), \({lon_{left}}_{-6}\) and \({lat_{upper}}_{-6}\) features were removed from both sets, while \({lat_{lower}}_6\) and \({lon_{right}}_0\) were removed from the features of DS-1 and DS-2, respectively.
ML models and quantification
ML algorithms build a model based on training data set in order to make predictions without being explicitly programmed to do so. The algorithms are categorized as supervised when the training data set has labeled input and output data, and unsupervised when the data set is not labeled. In this study we adopt supervised algorithms only as the data set is labeled. Seven linear and non-linear ML models are implemented and tested. The used ML models are Ridge Regression (RR), Support Vector Regressor (SVR), Decision Tree Regressor (DTR), Random Forest Regressor (RFR), Extra Trees Regressor (ETR), Gradient Boosted Decision Tree Regressor (GBDTR) and Adaptive Boost (AdaBoost) Regressor. Each of these algorithms has its own hyperparameters that should be optimized.
Ridge regression is a variation of the ordinary least squares (OLS) method which expects that the target value is a linear combination of the features. The OLS aims to minimize objective function function
where X is the input feature, y is the target, and w is the weight of the linear combination. Highly correlated features (collinearity) make the OLS more sensitive to random errors. The RR addresses this issue by imposing a penalty on the weight values by adding L2-norm of the weights multiplied by the penalty parameter (\(\alpha\)) to the loss function.
The penalty parameter controls the amount of shrinkage of the weights. The larger the value of \(\alpha\), the smaller the weights are and thus more robust to collinearity. The hyperparameters that will be tuned to get the best results are \(\alpha\), the solver to use in computational routines, and the stopping criteria defined by the tolerance of error.
Support vector regressor main objective is to minimize L2-norm of the coefficient vector. The optimization problem, Eq. (5), is constrained such that the absolute error between the predicted and true values is less than or equal to a specified margin (\(\varepsilon > 0\)).
This constrained optimization problem does not account for the data points outside the margin \(\varepsilon\). Thus, an L\(-1\) penalized term is added to the objective function to include extra points, equation 6.
where \(C > 0\) is the penalty term, and \(\zeta\) is a slack variable defined as the deviation of data point from the margin. As C increases, the tolerance for points outside the interval \(\varepsilon\) increases. Thus, the hyperparameters that will be tuned to get the best results are C, and \(\varepsilon\)
Decision tree regressor is a non-parameteric supervised learning method. They are generated in a recursive process. A decision tree is composed of root nodes, internal nodes, and leaf nodes where the nodes are connected by branches. The root node is the topmost node that has the complete data set, each internal node denotes a test, each branch represents a test attribute, and each leaf node corresponds to a result. The path from the root node to each leaf node corresponds to a sequence of test judgments which is based on the Gini index. The hyperparameters that will be tuned to get the best results are the maximum depth of the tree (max depth) and minimum number of samples required on a leaf node (min samples leaf).
Random forest and extra trees regressors are parallel ensemble methods of the decision trees. They are based on training multiples of weak learners, then the outputs are averaged to obtain the final predicted output. The main differences between the random forest and extra trees are that the RFR subsamples the input data with replacement (bootstrap) while the ETR uses the whole data set. Also, the test judgements in RFR is based on optimum split while it is random in ETR . The hyperparameters that will be tuned to get the best results are the maximum depth of the tree (max depth), the minimum number of samples required on a leaf node (min samples leaf), and the number of weak learners (n estimators).
Adaptive boost and gradient boosted decision tree regressors are based on a boosting technique, i.e. a sequential ensemble method. Initially, a weak learner (base estimator) is trained using the whole training data set. This data set is then adjusted based on the prediction of the weak learner, so that it gives more attention to the incorrectly predicted samples by the previous weak learner. This cycle is repeated until it reaches the specified number of weak learners (n estimator). Finally, all weak learners are weighted and combined. AdaBoost assigns weights to every data point in the data set. The weights of wrongly predicted values in the first weak learner will increase in the following ones. The base estimator in the AdaBoost can be any ML algorithm. On the other hand, the GBDTR uses regression decision trees as their base estimators. It uses the residual of the current regression tree as the input to the consecutive tree. Thus, each regression tree learns the conclusions and residuals of all previous trees, and fits a current residual regression tree. Both AdaBoost and GBDTR use the weighted sum of the weak learners to get the final result. The hyperparameters of the AdaBoost are the base estimator, learning rate (LR), the number of weak learners (n estimators), and the loss function, while those of the GBDTR are the learning rate (LR), number of weak learners (n estimators), and maximum depth of the tree (max depth).
Performance metrics
The performance of the different models was evaluated by comparing the peak storm surge height as predicted from the ML models (\(\eta _p\)) to those calculated from ADCIRC + SWAN models (\(\eta _a\)). Different metrics have been used in the literature to evaluate the performance of ML models with respect to true data. Here, we adopt the correlation coefficient (R), Eq. (1), and coefficient of determination (R2) defined as
where N is the size of the data set, and \({\overline{\eta }}_a\) is the average value of \({\eta }_a\). The absolute values of R and R2 range between zero and one respectively signifying no and perfect match. We also use Relative Absolute Error and Mean Relative Absolute Error (RAE, MRAE) defined respectively as
to measure the performance of the ML models. Zero values of these errors indicate the perfect match. Lastly, we use the Root Mean Square Error (RMSE) defined as
with a zero value indicating perfect matching.
Hyper-parameters tuning
In developing these models, \(60\%\) of the DS-1 and DS-2 data sets were used for training while \(20\%\) were used for validation. The rest were used for testing the models’ performance. The training was performed using scikit-learn library on Python66. The used hyper-parameters of each ML model, presented in Table 1, were tuned using the cross-validation grid search method, by trying all possible combinations between the hyper-parameters and by getting the best performing configuration for training.
Results
ML results
The performance metrics, as defined above, of the seven models are presented in Table 2 using the test data sets. Decision Tree models are extremely sensitive to small changes in data, easy to overfit, and are not able to deal with collinearity, i.e. when two variables represent the same thing. The Ridge Regression model trades variance for bias, i.e. the output has a low variance but is biased, which causes large errors in the case of small number of features with respect to the number of samples. Thus, based on the numbers in Table 2, the Ridge Regression and Decision Tree models have consistently lower correlation and determination coefficients and higher MRAE and RMSE values. On the other hand, the SVR is robust to outliers, does not suffer from overfitting, and is not affected by small changes in the data. The AdaBoost model is less prone to overfitting, and utilizes the weighted average of multiple weak learners using a base estimator to yield a robust result. Thus, by using SVR as the base estimator for AdaBoost, we combine the advantages of the two models. Therefore, SVR and AdaBoost models yield the highest correlation and determination coefficients and lowest MRAE and RMSE values. For the same model, slight differences in the performance metrics are noted among the different locations for the two data sets.
Figure 5 shows the scatter plots of the peak storm surge heights calculated using ADCIRC + SWAN models with those predicted from the ML models of the test data set of the (DS-1, and DS-2) data sets combined. Ideally, the scatter points should be close to the regressed diagonal line that represents a perfect fit. The linear fit of the scattered points should also coincide with the perfect fit line with slope 1. The slopes of the linear fit of the test data at Battery, Montauk, Atlantic City, and Beach Haven West are 0.98, 1, 0.98, and 1, respectively. This indicates a high level of agreement between the ADCIRC + SWAN results and ML models predictions. Further evidence of the goodness of the ML models predictions is noted from the histograms and corresponding normal distribution fits of the error, defined by the difference between the storm surge height calculated using ADCIRC + SWAN and predicted from ML models for the two test data sets, which are presented in Fig. 6. The mean, and standard deviation of the error at the four stations are about 0 and 5 cm, respectively. The reference lines, represented by dashed lines, in Fig. 5 indicates the 95-th and 99-th percentiles calculated from the normal distribution fits of the errors in Fig. 6, on average 64 out of 2072 storms are outside the 99-th percentile range and 108 are outside the 95-th percentile range. These results show that, to great extent, the peak storm surge heights predicted from the ML models match those simulated by ADCIRC + SWAN model.

Scatter plots between the peak storm surge height calculated using the high-fidelity ADCIRC + SWAN simulations and those predicted from ML models at the four study sites.

Histograms of the error between peak storm surge heights determined by the high-fidelity ADCIRC + SWAN simulations and those predicted from ML models at the four study sites.
Probabilistic flood hazard assessment
Statistical model
The probabilistic flood hazard assessment is presented in terms of peak storm surge height at the four selected study sites. Assuming that the TC’s arrival is distributed as a stationary Poisson process, the return period (T) of peak storm surge height (\(\eta _{TC}\)) exceeding a given threshold (h) is given by67
where F is the TC annual frequency, and \(P \left[ \eta _{TC} \le h \right]\) is the cumulative probability distribution (CDF). The distribution of the peak storm surge heights due to TCs is characterized by long tail which is modeled using the Generalized Pareto Distribution (GPD)68
where \(H(y) = P[y>u]\) is the CDF of the GPD, and u is the GPD threshold value which is selected by try and error so that the modeled CDF well represents the data points. The parameters \(\sigma _u\) and \(\zeta\) are the controlling parameters of the scale and shape of the GPD distribution, respectively. Both parameters are statistically estimated using the Maximum Likelihood method.
Return periods results
Figure 7 shows the empirical and Pareto distribution fits of the peak storm surge heights return period along with the 90-th percentile confidence interval for the four study sites. Using the test data set, plots from both ADCIRC + SWAN simulated and ML predicted results are presented. A frequency of 0.52 storm per year is assumed for both ADCIRC + SWAN and ML results. The used Pareto threshold values, and the RAE between the predicted 10-, 100-, 1000-, and 4000-year return periods using ADCIRC + SWAN and ML results are presented in Table 3. The maximum RAE is less than \(0.7\%\) for the 10-year return period, \(5\%\) for the 100- and 1000-year return periods, and \(7\%\) for the 4000-year return period. Also, the RMSE between the Pareto distribution fits using ADCIRC + SWAN and ML results for the four study sites is less than 7.5 cm. These results indicate that return period curves generated from ML predictions match very well those generated from ADCIRC + SWAN simulations but at a fraction of the computational time and resources.

Comparison of return period curves with confidence intervals at the four study sites using peak storm surge generated by ADCIRC + SWAN and ML models.
Conclusions
We demonstrated the usefulness of artificial intelligence in reducing the computational burden of predicting high-consequence low-probability (up to 4000-year return period) storm surge from tropical storms. Given the geographic boundaries of TC development in terms of their track and variations in their strength, it was necessary to take into consideration the impact of these variations on model training. Seven linear and non-linear ML models were implemented and tested. Their hyperparameters were optimized. Model was trained using simulations performed with the coupled ADvanced CIRCulation and Simulating WAves Nearshore (ADCIRC + SWAN) models of peak storm surge heights in the metropolitan New York area. The input to the ML models are TC parameters that included maximum sustained wind speed, upper and lower latitudinal, right and left longitudinal distances, and minimum distance between our point of interest and the TC eye, at three time steps, namely the moment of minimum distance and 6 h before and after this moment. The analysis showed the need to divide the data set to overcome an imbalance problem in the total data set. Evaluation of performance metrics showed that Support Vector Regression and Adaptive Boosting models performed better than others in terms of predicting peak surge heights because they are robust to outliers, less prone to overfitting, and not affected by small changes in the data. These predictions yield return period curves that matched very well those generated from high-fidelity but computationally expensive ADCIRC + SWAN simulations. The results demonstrated the efficiency of surrogate models in predicting return periods when compared with ADCIRC + SWAN simulations.
Data availability
The data that support the findings of this study are available from the corresponding author, M.A., upon reasonable request.
References
Colle, B. A. et al. New York City’s vulnerability to coastal flooding: Storm surge modeling of past cyclones. Bull. Am. Meteorol. Soc. 89, 829–842 (2008).
Blake, E. S. et al. Tropical cyclone report: Hurricane sandy. Natl. Hurricane Center 12, 1–10 (2013).
Latto, A., Hagen, A. & Berg, R. Tropical cyclone report: Hurricane isaias (al092020) (Tech. Rep, National Hurricane Center, 2021).
Ayyad, M., Orton, P. M., El Safty, H., Chen, Z. & Hajj, M. R. Ensemble forecast for storm tide and resurgence from Tropical Cyclone Isaias. In Weather and Climate Extremes, vol. 38, 100504 (Elsevier, 2022).
Bender, M. A. et al. Modeled impact of anthropogenic warming on the frequency of intense Atlantic hurricanes. Science 327, 454–458 (2010).
Murakami, H. et al. Future changes in tropical cyclone activity projected by the new high-resolution MRI-AGCM. J. Clim. 25, 3237–3260 (2012).
Emanuel, K. A. Downscaling cmip5 climate models shows increased tropical cyclone activity over the 21st century. Proc. Natl. Acad. Sci. 110, 12219–12224 (2013).
Knutson, T. R. et al. Dynamical downscaling projections of twenty-first-century Atlantic hurricane activity: Cmip3 and cmip5 model-based scenarios. J. Clim. 26, 6591–6617 (2013).
Holland, G. & Bruyère, C. L. Recent intense hurricane response to global climate change. Clim. Dynam. 42, 617–627 (2014).
Knutson, T.R. et al. Global projections of intense tropical cyclone activity for the late twenty-first century from dynamical downscaling of cmip5/rcp4.5 scenarios. J. Clim. 28, 7203–7224 (2015).
Lee, C.-Y., Tippett, M. K., Sobel, A. H. & Camargo, S. J. Rapid intensification and the bimodal distribution of tropical cyclone intensity. Nat. Commun. 7, 1–5 (2016).
Ramsay, H. The global climatology of tropical cyclones. in Oxford Research Encyclopedia of Natural Hazard Science (2017).
Bhatia, K., Vecchi, G., Murakami, H., Underwood, S. & Kossin, J. Projected response of tropical cyclone intensity and intensification in a global climate model. J. Clim. 31, 8281–8303 (2018).
Kossin, J. P. A global slowdown of tropical-cyclone translation speed. Nature 558, 104–107 (2018).
Gutmann, E. D. et al. Changes in hurricanes from a 13-yr convection-permitting pseudo-global warming simulation. J. Clim. 31, 3643–3657 (2018).
Hall, T. M. & Kossin, J. P. Hurricane stalling along the North American coast and implications for rainfall. NPJ Clim. Atmos. Sci. 2, 1–9 (2019).
Bhatia, K. T. et al. Recent increases in tropical cyclone intensification rates. Nat. Commun. 10, 1–9 (2019).
Ruckert, K. L., Srikrishnan, V. & Keller, K. Characterizing the deep uncertainties surrounding coastal flood hazard projections: A case study for Norfolk, VA. Sci. Rep. 9, 1–12 (2019).
Mayo, T. L. & Lin, N. Climate change impacts to the coastal flood hazard in the northeastern United States. Weather Clim. Extremes. 100453 (2022).
Hoekstra, A. Y. & De Kok, J.-L. Adapting to climate change: A comparison of two strategies for dike heightening. Nat. Hazards 47, 217–228 (2008).
Wallingford, H. et al. The joint probability of waves and water levels: Join-sea, a rigorous but practical new approach. HR Wallingford Report SR 537 (2000).
Ayyad, M., Hajj, M. R. & Marsooli, R. Artificial intelligence for hurricane storm surge hazard assessment. Ocean Eng. 245, 110435. https://doi.org/10.1016/j.oceaneng.2021.110435 (2022).
Jelesnianski, C. P. SLOSH: Sea, Lake, and Overland Surges from Hurricanes Vol. 48 (US Department of Commerce, National Oceanic and Atmospheric Administration, 1992).
Luettich Jr, R. A., Westerink, J. J. & Scheffner, N. W. Adcirc: An advanced three-dimensional circulation model for shelves, coasts, and estuaries. Report 1: Theory and methodology of adcirc-2ddi and adcirc-3dl. Tech. Rep., Coastal engineering research center vicksburg MS (1992).
Booij, N., Ris, R. C. & Holthuijsen, L. H. A third-generation wave model for coastal regions: 1. Model description and validation. J. Geophys. Res. Oceans. 104, 7649–7666 (1999).
Ris, R., Holthuijsen, L. & Booij, N. A third-generation wave model for coastal regions: 2. Verification. J. Geophys. Res. Oceans. 104, 7667–7681 (1999).
Richardson, W. S. & Boggio, C. L. A new extratropical storm surge forecast equation for charleston, south carolina. Tech. Rep., TDL Office Note 80-7, National Weather Service, NOAA, U.S. Department of Commerce (1980).
Das, H. S., Jung, H., Ebersole, B., Wamsley, T. & Whalin, R. W. An efficient storm surge forecasting tool for coastal Mississippi. Coastal Eng. Proc. 1, 21 (2011).
Kopp, R. E. et al. Probabilistic 21st and 22nd century sea-level projections at a global network of tide-gauge sites. Earth’s Future 2, 383–406 (2014).
Kopp, R. E. et al. Evolving understanding of Antarctic ice-sheet physics and ambiguity in probabilistic sea-level projections. Earth’s Future 5, 1217–1233 (2017).
Wong, T. E. & Keller, K. Deep uncertainty surrounding coastal flood risk projections: A case study for new Orleans. Earth’s Future 5, 1015–1026 (2017).
Rasmussen, D. et al. Extreme sea level implications of 1.5 c, 2.0 c, and 2.5 c temperature stabilization targets in the 21st and 22nd centuries. Environ. Res. Lett. 13, 034040 (2018).
Lee, T.-L. Neural network prediction of a storm surge. Ocean Eng. 33, 483–494 (2006).
Tseng, C.-M., Jan, C.-D., Wang, J.-S. & Wang, C. Application of artificial neural networks in typhoon surge forecasting. Ocean Eng. 34, 1757–1768 (2007).
Lee, T.-L. Back-propagation neural network for the prediction of the short-term storm surge in Taichung harbor, Taiwan. Eng. Appl. Artif. Intell. 21, 63–72 (2008).
De Oliveira, M. M., Ebecken, N. F. F., De Oliveira, J. L. F. & de Azevedo Santos, I. Neural network model to predict a storm surge. J. Appl. Meteorol. Climatol. 48, 143–155 (2009).
Kim, S., Pan, S. & Mase, H. Artificial neural network-based storm surge forecast model: Practical application to Sakai Minato, Japan. Appl. Ocean Res. 91, 101871 (2019).
Hashemi, M. R., Spaulding, M. L., Shaw, A., Farhadi, H. & Lewis, M. An efficient artificial intelligence model for prediction of tropical storm surge. Nat. Hazards 82, 471–491 (2016).
Lee, J.-W., Irish, J. L., Bensi, M. T. & Marcy, D. C. Rapid prediction of peak storm surge from tropical cyclone track time series using machine learning. Coastal Eng. 170, 104024 (2021).
Tiggeloven, T., Couasnon, A., van Straaten, C., Muis, S. & Ward, P. J. Exploring deep learning capabilities for surge predictions in coastal areas. Sci. Rep. 11, 1–15 (2021).
Jia, G. & Taflanidis, A. A. Kriging metamodeling for approximation of high-dimensional wave and surge responses in real-time storm/hurricane risk assessment. Comput. Methods Appl. Mech. Eng. 261, 24–38 (2013).
Jia, G. et al. Surrogate modeling for peak or time-dependent storm surge prediction over an extended coastal region using an existing database of synthetic storms. Nat. Hazards 81, 909–938 (2016).
Kyprioti, A. P., Taflanidis, A. A., Nadal-Caraballo, N. C. & Campbell, M. Storm hazard analysis over extended geospatial grids utilizing surrogate models. Coastal Eng. 103855 (2021).
Yousefi, S. et al. A machine learning framework for multi-hazards modeling and mapping in a mountainous area. Sci. Rep. 10, 1–14 (2020).
Westerink, J. J., Luettich Jr, R., Blain, C. & Scheffner, N. W. Adcirc: An advanced three-dimensional circulation model for shelves, coasts, and estuaries. report 2: User’s manual for adcirc-2ddi. Tech. Rep., Army Engineer Waterways Experiment Station Vicksburg Ms (1994).
Holland, G. J. An analytic model of the wind and pressure profiles in hurricanes. Mon. Weather Rev. 108, 1212–1218 (1980).
Holland, G. A revised hurricane pressure-wind model. Mon. Weather Rev. 136, 3432–3445 (2008).
Swa, N. Scientific and Technical Documentation (Delft University of Technology, 2021).
Dietrich, J. et al. Modeling hurricane waves and storm surge using integrally-coupled, scalable computations. Coastal Eng. 58, 45–65 (2011).
Xie, D.-M., Zou, Q.-P. & Cannon, J. W. Application of swan+ adcirc to tide-surge and wave simulation in gulf of maine during patriot’s day storm. Water Sci. Eng. 9, 33–41 (2016).
Marsooli, R. & Lin, N. Numerical modeling of historical storm tides and waves and their interactions along the us east and gulf coasts. J. Geophys. Res. Oceans. 123, 3844–3874 (2018).
FEMA. Region II Storm Surge Project: Mesh Development. Washington DC, USA: Federal Emergency Management Agency, Department of Homeland Security. (2014).
of Engineers, U. A. C. Louisiana coastal protection and restoration (lacpr): Final technical report (2009).
FEMA. Region II Storm Surge Projec: Model Calibration and Validation. Washington DC, USA: Federal Emergency Management Agency, Department of Homeland Security (2014).
Powell, M. D. & Ginis, I. Drag coefficient distribution and wind speed dependence in tropical cyclones. in Final Report to the National Oceanic and Atmospheric Administration (NOAA) Joint Hurricane Testbed (JHT) Program (2006).
Pore, N. A. & Barrientos, C. S. Storm surge (1976).
Orton, P. et al. New York City panel on climate change 2015 report chapter 4: Dynamic coastal flood modeling. Ann. N.Y. Acad. Sci. 1336, 56–66 (2015).
Yin, J., Lin, N. & Yu, D. Coupled modeling of storm surge and coastal inundation: A case study in New York City during Hurricane Sandy. Water Resources Res. 52, 8685–8699 (2016).
Ramos Valle, A. N., Curchitser, E. N., Bruyere, C. L. & Fossell, K. R. Simulating storm surge impacts with a coupled atmosphere-inundation model with varying meteorological forcing. J. Mar. Sci. Eng. 6, 35 (2018).
Ramos-Valle, A. N., Curchitser, E. N. & Bruyère, C. L. Impact of tropical cyclone landfall angle on storm surge along the mid-atlantic bight. J. Geophys. Res. Atmos. 125, e2019JD031796 (2020).
Marsooli, R., Jamous, M. & Miller, J. K. Climate change impacts on wind waves generated by major tropical cyclones off the coast of New Jersey, USA. Front. Built Environ. 161 (2021).
Marsooli, R. & Lin, N. Impacts of climate change on hurricane flood hazards in Jamaica Bay, New York. Clim. Change 163, 2153–2171 (2020).
Emanuel, K., Sundararajan, R. & Williams, J. Hurricanes and global warming: Results from downscaling ipcc ar4 simulations. Bull. Am. Meteorol. Soc. 89, 347–368 (2008).
Cover, T. M. & Thomas, J. A. Elements of Information Theory (Wiley, 2005).
Ayyad, M., Hajj, M. R. & Marsooli, R. Spatial variation in sensitivity of hurricane surge characteristics to hurricane parameters. J. Eng. Mech. 147, 04021070 (2021).
Pedregosa, F. et al. Scikit-learn: Machine learning in Python. J. Machine Learn. Res. 12, 2825–2830 (2011).
Lin, N., Kopp, R. E., Horton, B. P. & Donnelly, J. P. Hurricane sandy’s flood frequency increasing from year 1800 to 2100. Proc. Natl. Acad. Sci. 113, 12071–12075 (2016).
Coles, S., Bawa, J., Trenner, L. & Dorazio, P. An introduction to statistical modeling of extreme values, vol. 208 (Springer, 2001).
Author information
Authors and Affiliations
Contributions
M.A. and M.R.H.: conceptualization, methodology, visualization. M.A.: software, writing—original draft. M.A. and R.M.: data curation, formal analysis. M.R.H.: supervision, writing—review and editing. R.M.: Resources, writing—review.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ayyad, M., Hajj, M.R. & Marsooli, R. Machine learning-based assessment of storm surge in the New York metropolitan area. Sci Rep 12, 19215 (2022). https://doi.org/10.1038/s41598-022-23627-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-022-23627-6
This article is cited by
-
Modeling of land subsidence using GIS-based artificial neural network in Yunlin County, Taiwan
Scientific Reports (2023)
-
Sea level variability and modeling in the Gulf of Guinea using supervised machine learning
Scientific Reports (2023)
-
Climate change impact on hurricane storm surge hazards in New York/New Jersey Coastlines using machine-learning
npj Climate and Atmospheric Science (2023)
-
A novel deep learning approach for typhoon-induced storm surge modeling through efficient emulation of wind and pressure fields
Scientific Reports (2023)
-
Storm surge level prediction based on improved NARX neural network
Journal of Computational Electronics (2023)
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
