
Abstract
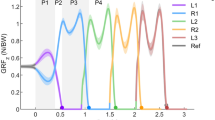
The human foot is a very complex structure comprising numerous bones, muscles, ligaments and synovial joints. As the only component in contact with the ground, the foot complex delivers a variety of biomechanical functions during human locomotion, e.g. body support and propulsion, stability maintenance and impact absorption. These need the human foot to be rigid and damped to transmit ground reaction forces to the upper body and maintain body stability, and also to be compliant and resilient to moderate risky impacts and save energy. How does the human foot achieve these apparent conflicting functions? In this study, we propose a phase-dependent hypothesis for the overall locomotor functions of the human foot complex based on in-vivo measurements of human natural gait and simulation results of a mathematical foot model. We propse that foot functions are highly dependent on gait phase, which is a major characteristics of human locomotion. In early stance just after heel strike, the foot mainly works as a shock absorber by moderating high impacts using the viscouselastic heel pad in both vertical and horizontal directions. In mid-stance phase (~80% of stance phase), the foot complex can be considered as a springy rocker, reserving external mechanical work using the foot arch whilst moving ground contact point forward along a curved path to maintain body stability. In late stance after heel off, the foot complex mainly serves as a force modulator like a gear box, modulating effective mechanical advantages of ankle plantiflexor muscles using metatarsal-phalangeal joints. A sound understanding of how diverse functions are implemented in a simple foot segment during human locomotion might be useful to gain insight into the overall foot locomotor functions and hence to facilitate clinical diagnosis, rehabilitation product design and humanoid robot development.
Similar content being viewed by others


References
Hicks J H. The mechanics of the foot. I. The joints. Journal of Anatomy, 1953, 87, 345–357.
Hicks J H. The mechanics of the foot. II. The plantar aponeurosis and the arch. Journal of Anatomy, 1954, 88, 25–30.
Whittle M W. Generation and attenuation of transient impulsive forces beneath the foot: A review. Gait and Posture, 1999, 10, 264–275.
Carrier D R, Heglund N C, Earls K D. Variable gearing during locomotion in the human musculoskeletal system. Science, 1994, 265, 651–653.
Erdemir A, Piazza S J. Rotational foot placement specifies the lever arm of the ground reaction force during the push-off phase of walking initiation. Gait and Posture, 2002, 15, 212–219.
Carson M C, Harrington M E, Thompson N, O’Connor J J, Theologis T N. Kinematic analysis of a multi-segment foot model for research and clinical applications: A repeatability analysis. Journal of Biomechanics, 2001, 34, 1299–1307.
De Clercq D, Aerts P, Kunnen M. The mechanical characteristics of the human heel pad during foot strike in running: An in vivo cineradiographic study. Journal of Biomechanics, 1994, 27, 1213–1222.
Gefen A, Megido-Ravid M, Itzchak Y, Arcan M. Biomechanical analysis of the three-dimensional foot structure during gait: A basic tool for clinical applications. Journal of Biomechanical Engineering, 2000, 122, 630–639.
Nagatsu M, Kubota S, Aoki M, Tsukishima T, Arimoto H, Sato K, Gilchrist L A, Winter D A. A two-part, viscoelastic foot model for use in gait simulations. Journal of Biomechanics, 1996, 29, 795–798.
Jenkyn T R, Nicol A C. A multi-segment kinematic model of the foot with a novel definition of forefoot motion for use in clinical gait analysis during walking. Journal of Biomechanics, 2007, 40, 3271–3278.
Ker R F, Bennett M B, Bibby S R, Kester R C, Alexander R M. The spring in the arch of the human foot. Nature, 1987, 325, 147–149.
Nester C J, Liu A M, Ward E, Howard D, Cocheba J, Derrick T, Paterson P. In vitro study of foot kinematics using a dynamic walking cadaver model. Journal of Biomechanics, 2007, 40, 1927–1937.
Scott S H, Winter D A. Biomechanical model of the human foot: Kinematics and kinetics during the stance phase of walking. Journal of Biomechanics, 1993, 26, 1091–1104.
Ren L, Howard D, Ren L Q, Tian L M, Nester C J. A generic analytical foot rollover model for predicting translational ankle kinematics in gait simulation studies. Journal of Biomechanics, in review.
Winter D A, Sidwall H G, Hobson D A. Measurement and reduction of noise in kinematics of locomotion. Journal of Biomechanics, 1974, 7, 157–159.
Pezzack J C, Norman R W, Winter D A. An assessment of derivative determining techniques used for motion analysis. Journal of Biomechanics, 1977, 10, 377–382.
Hansen A H, Childress D S, Knox E H. Roll-over shapes of human locomotor systems: Effects of walking speed. Clinical Biomechanics, 2004, 19, 407–414.
Gefen A, Megido-Ravid M, Itzchak Y. In vivo biomechanical behavior of the human heel pad during the stance phase of gait. Journal of Biomechanics, 2001, 34, 1661–1665.
Ker R F. The time-dependent mechanical properties of the human heel pad in the context of locomotion. Journal of Experimental Biology, 1996, 199, 1501–1508.
Cavagna G A, Heglund N C, Taylor C R. Mechanical work in terrestrial locomotion: Two basic mechanisms for minimizing energy expenditure. American Journal of Physiology, 1977, 233, R243–R261.
Donelan J M, Kram R, Kuo A D. Simultaneous positive and negative external mechanical work in human walking. Journal of Biomechanics, 2002, 35, 117–124.
Adamczyk P G, Collins S H, Kuo A D. The advantages of a rolling foot in human walking. Journal of Experimental Biology, 2006, 209, 3953–3963.
McGeer T. Passive dynamic walking. International Journal of Robotics Research, 1990, 9, 62–82.
Ren L, Jones R K, Howard D. Predictive modelling of human walking over a complete gait cycle. Journal of Biomechanics, 2007, 40, 1567–1574.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ren, L., Howard, D., Ren, Lq. et al. A Phase-Dependent Hypothesis for Locomotor Functions of Human Foot Complex. J Bionic Eng 5, 175–180 (2008). https://doi.org/10.1016/S1672-6529(08)60022-0
Published:
Issue Date:
DOI: https://doi.org/10.1016/S1672-6529(08)60022-0