
Abstract
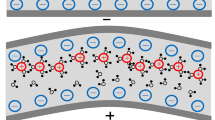
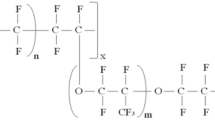
Ionic Polymer-Metal Composite (IPMC) can work as an actuator by applying a few voltages. A thick IPMC actuator, where Nafion-117 membrane was synthesized with polypyrrole/alumina composite filler, was analyzed to verify the equivalent beam and equivalent bimorph beam models. The blocking force and tip displacement of the IPMC actuator were measured with a DC power supply and Young’s modulus of the IPMC strip was measured by bending and tensile tests respectively. The calculated maximum tip displacement and the Young’s modulus by the equivalent beam model were almost identical to the corresponding measured data. Finite element analysis with thermal analogy technique was utilized in the equivalent bimorph beam model to numerically reproduce the force-displacement relationship of the IPMC actuator. The results by the equivalent bimorph beam model agreed well with the force-displacement relationship acquired by the measured data. It is confirmed that the equivalent beam and equivalent bimorph beam models are practically and effectively suitable for predicting the tip displacement, blocking force and Young’s modulus of IPMC actuators with different thickness and different composite of ionic polymer membrane.
Similar content being viewed by others

References
Yu M, Shen H, Dai Z D. Manufacture and performance of ionic polymer-metal composites. Journal of Bionic Engineering, 2007, 4, 143–149.
Shahinpoor M, Kim K J. Ionic polymer-metal composites III, Modeling and simulation as biomimetic sensors, actuators, transducers, and artificial muscles. Smart Material and Structures, 2004, 13, 1362–1388.
Shahinpoor M. Microelectro-mechanics of ionic polymeric ionic polymeric gels as artificial muscles for robotic applications. Proceedings of IEEE International Conference on Robotics & Automation, Atlanta, GA, USA, 1993, 380–385.
Shahinpoor M. Electro-mechanics of bending of ionic polymeric gels as synthetic muscles for adaptive structures. In: Carman G P, Garcia E (eds), Adaptive Structures and Material Systems, ASME Publication AD, New York, USA, 1993, 35, 11–22.
Shahinpoor M. Continuum electromechanics of ionic polymeric ionic polymeric gels as artificial muscles for robotic applications. International Journal of Smart Material and Structures, 1994, 3, 367–372.
Shahinpoor M. Micro-electro-mechanics of ionic polymer gels as electrically controllable artificial muscles. Journal of Intelligent Material and System Structure, 1995, 6, 307–317.
Shahinpoor M, Kim K J. Ionic polymer-metal composites I, Fundamentals. Smart Material and Structures, 2001, 10, 819–833.
Kim K J, Shahinpoor M. Ionic polymer-metal composites II, Manufacturing techniques. Smart Material and Structures, 2003, 12, 65–79.
Nemat-Nasser S, Li J Y. Electromechanical response of ionic polymer-metal composites. Journal of Applied Physics, 2000, 87, 3321–3331.
Nemat-Nasser S. Micro-mechanics of actuation of ionic polymer-metal composites. Journal of Applied Physics, 2002, 92, 2899–2915.
Nemat-Nasser S, Wu Y. Comparative experimental study of ionic polymer-metal composites with different backbone ionomers and in various cation forms. Journal of Applied Physics, 2003, 93, 5255–5267.
Kanno R, Kurata A, Hattori M, Tadokoro S, Takamori T, Oguro K. Characteristics and modeling of ICPF actuators. Proceedings of Japan-USA Symposium on Flexible Automation, 1994, 2, 691–698.
Newbury K M. Modeling, Characterization, and Control of Ionic Polymer Transducers, PhD Dissertation, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2002.
Xiao Y, Bhattacharya K. Modeling electromechanical properties of ionic polymers. Proceedings of SPIE, 2001, 4329, 292–300.
Kanno R, Tadokoro S, Takamori T, Hattori M. Linear approximate dynamic model of ICPF (ionic conducting polymer gel film) actuator. Proceedings of the IEEE International Conference on Robotics and Automation, Piscataway, NJ, USA, 1996, 219–225.
DeGennes P, Okumura K, Shahinpoor M, Kim K J. Mechanoelectric effects in ionic gels. Europhysics Letters, 2000, 40, 513–518.
Lee S, Park H C, Kim K J. Equivalent modeling for ionic polymer-metal composite actuators based on beam theories. Smart Material and Structures, 2005, 14, 1363–1368.
Lee J W, Kim J H, Chun Y S, Hong S M, Yoo Y T. The performance of Nafion-based IPMC actuators containing polypyrrole/alumina composite fillers. Macromolecular Research, accepted on August 3, 2009.
Wang Q, Zhang Q, Xu B, Liu R, Cross E. Nonlinear piezoelectric behavior of ceramic bending mode actuators under strong electric fields. Journal of Applied Physics, 1999, 86, 3352–3360.
ANSYS Inc. ANSYS User’s Manual, Houston, PA, USA, 2005.
Taleghani B K, Campbell J F. Non-linear finite element modeling of THUNDER piezoelectric actuators. NASA Technical Report, 1999, TM-1999-209322, 1–18.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ji, Ah., Park, H.C., Nguyen, Q.V. et al. Verification of beam models for ionic polymer-metal composite actuator. J Bionic Eng 6, 232–238 (2009). https://doi.org/10.1016/S1672-6529(08)60117-1
Published:
Issue Date:
DOI: https://doi.org/10.1016/S1672-6529(08)60117-1