
Abstract
Purpose
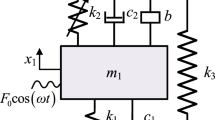
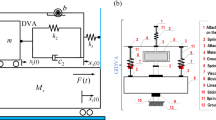
This paper propose a grounded-type DVA attached to a damped primary system, which can effectively suppress the vibration amplitudes by introducing a lever, focusing on the optimal design of the novel DVA. It can be utilized to the simplified model of a damped spacecraft or stay cable of cable-stayed bridges.
Methods
The design of DVA considers \({\mathrm{H}}_{\infty }\) and \({\mathrm{H}}_{2}\) optimization criteria, and defines performance indicators separately. In the \({\mathrm{H}}_{\infty }\) optimization, we couple generalized fixed-point theory (GFPT) and perturbation method (PM) with particle swarm optimization (PSO) algorithm to minimize the maximum amplitude amplification factor of primary system, so that the amplitudes at two fixed points are close to the same horizontal line. Nevertheless, in the \({\mathrm{H}}_{2}\) optimization, the GFPT and PM are combined with Newton’s method to minimize the power input to primary system.
Results
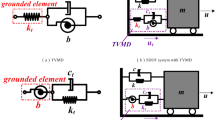
The numerical results indicate the consistency and effectiveness of the two optimization criteria. Compared with other classical models, the effects of different grounded stiffness ratios on the amplitude frequency responses, time histories, and vibration energies of the primary system subjected to harmonic excitation and random excitation, respectively, as well as the vibration reduction effect, are studied.
Conclusions
Numerical simulations display with the positive grounded stiffness, the proposed DVA outperform the existing DVAs with same mass, damping, and stiffness under the harmonic excitation and random excitation. The results can provide theoretical and computational guidance for the optimal design of DVA.

















Similar content being viewed by others
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Asami T (2019) Exact algebraic solution of an optimal double-mass dynamic vibration absorber attached to a damped primary system. J Vib Acoust 10(1115/1):4043815
Brock JE (1946) A note on the damped vibration absorber 13(4):A284
Chang W, Jin X, Huang Z et al (2021) Random response of nonlinear system with inerter-based dynamic vibration absorber. J Vib Eng Technol 9(8):1903–1909. https://doi.org/10.1007/s42417-021-00334-6
Chen Y, Li J, Zhu S et al (2023) Further optimization of Maxwell-type dynamic vibration absorber with inerter and negative stiffness spring using particle swarm algorithm. Mathematics 11(8):1904. https://doi.org/10.3390/math11081904
Crandall SH, Mark WD (2014) Random vibration in mechanical systems. Academic Press, New York
Dai K, Tang J, Zhang S (2022) An integrated equivalent tuned-mass-inerter vibration absorber and its optimal design. Struct Control Health Monit 29(11):e3089. https://doi.org/10.1002/stc.3089
Den Hartog J, Ormondroyd J (1928) Theory of the dynamic vibration absorber. ASME J Appl Mech 50(7):11–22
Hao Y, Shen Y, Li X et al (2021) H-infinity optimization of Maxwell dynamic vibration absorber with multiple negative stiffness springs. J Low Freq Noise Vib Active Control 40(3):1558–1570. https://doi.org/10.1177/1461348420972818
Jagodzinski DJ, Miksch M, Aumann Q et al (2022) Modeling and optimizing an acoustic metamaterial to minimize low-frequency structure-borne sound. Mech Based Des Struct Mach 50(8):2877–2891. https://doi.org/10.1080/15397734.2020.1787842
Li C, Li Q (2005) Evaluation of the lever-type multiple tuned mass dampers for mitigating harmonically forced vibration. Int J Struct Stab Dyn 5(04):641–664. https://doi.org/10.1142/S0219455405001763
Li J, Gu X, Zhu S et al (2022) Parameter optimization for a novel inerter-based dynamic vibration absorber with negative stiffness. J Nonlinear Math Phys 29(2):280–295
Li J, Gao T, Zhu S et al (2023) H-infinity optimization of a novel Maxwell dynamic vibration absorber with lever, inerter, and grounded stiffness. Appl Sci Basel 13(6):3697. https://doi.org/10.3390/app13063697
Liu K, Liu J (2005) The damped dynamic vibration absorbers: revisited and new result. J Sound Vib 284(3–5):1181–1189. https://doi.org/10.1006/jsvi.2001.3564
Nasr A, Mrad C, Nasri R (2023) Explicit formulas for optimal parameters of friction dynamic vibration absorber attached to a damped system under various excitations. J Vib Eng Technol 11(1):85–97. https://doi.org/10.1007/s42417-022-00560-6
Nishihara O (2019) Exact optimization of a three-element dynamic vibration absorber: minimization of the maximum amplitude magnification factor. J Vib Acoust Trans Asme 141(1):011,001. https://doi.org/10.1115/1.4040575
Ren M (2001) A variant design of the dynamic vibration absorber. J Sound Vib 245(4):762–770. https://doi.org/10.1006/jsvi.2001.3564
Shen Y, Peng H, Li X et al (2017) Analytically optimal parameters of dynamic vibration absorber with negative stiffness. Mech Syst Signal Process 85:193–203. https://doi.org/10.1016/j.ymssp.2016.08.018
Shen Y, Xing Z, Yang S et al (2019) Parameters optimization for a novel dynamic vibration absorber. Mech Syst Signal Process 133(106):282. https://doi.org/10.1016/j.ymssp.2019.106282
Song QH, Xiao LJ, Song QJ et al (2022) Adaptive multiswarm particle swarm optimization for tuning the parameter optimization of a three-element dynamic vibration absorber. Mech Sci 13(1):505–517. https://doi.org/10.5194/ms-13-505-2022
Sui P, Shen Y, Yang S et al (2022) Parameters optimization of dynamic vibration absorber based on grounded stiffness, inerter, and amplifying mechanism. J Vib Control 28(23–24):3767–3779. https://doi.org/10.1177/10775463211038272
Wang X, He T, Shen Y et al (2019) Parameters optimization and performance evaluation for the novel inerter-based dynamic vibration absorbers with negative stiffness. J Sound Vib 463(114):941. https://doi.org/10.1016/j.jsv.2019.114941
Yamaguchi H (1988) Damping of transient vibration by a dynamic absorber. Trans Jpn Soc Mech Eng 54(499):561. https://doi.org/10.1299/kikaic.54.561
Zang J, Yuan TC, Lu ZQ et al (2018) A lever-type nonlinear energy sink. J Sound Vib 437:119–134. https://doi.org/10.1016/j.jsv.2018.08.058
Zhang Y, Ye K, Nyangi P (2022) Optimum design of a tuned-mass damper with negative stiffness device subjected to ground excitation. Struct Control Health Monit 29(11):e3086. https://doi.org/10.1002/stc.3086
Acknowledgements
This research was supported by National Natural Science Foundation of China (Grant No. 12272011) and also supported by National Key R &D Program of China (Grant No. 2022YFB3806000).
Author information
Authors and Affiliations
Contributions
Conceptualization: JL and HZ; data curation: JL and HZ; formal analysis: HZ and SZ; funding acquisition: JL; investigation: HZ and SZ; methodology: JL and HZ; project administration: JL and XY; resources: JL and XY; software: HZ and SZ; supervision: JL and SZ; validation: HZ and SZ; visualization: HZ and SZ; writing—original draft: JL and HZ; writing—review & editing: SZ and XY.
Corresponding authors
Ethics declarations
Conflict of interest
The author(s) declared no potential conflict of interest with respect to the research, authorship, and/or publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Symbolic expression
In Sect. 3.1 (Eqs. (21) and (23)), the expressions of coefficients \(a_i\) and \(b_i\)
Appendix B: Symbolic expression
In Sect. 3.2 (Eq. (32)), the coefficient matrix expressions corresponding to the nonlinear equations
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Li, J., Zhao, H., Zhu, S. et al. \({\mathrm{H}}_{\infty }\) and \({\mathrm{H}}_{2}\) Optimization of the Grounded-Type DVA Attached to Damped Primary System Based on Generalized Fixed-Point Theory Coupled Optimization Algorithm. J. Vib. Eng. Technol. 12, 4913–4929 (2024). https://doi.org/10.1007/s42417-023-01161-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s42417-023-01161-7