
Abstract
Purpose
The purpose of this study is to navigate an in-house robot under uncertain intraoperative changes of the body surface which is not present in the pre-operative scan in hospital environments and lab environment.
Methods
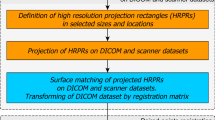
The proposed methodology involves the use of a 3D scanner to form a 3D model. The method used in this study is cost effective and takes less time (about 5–7 min). We focused more on the surface anatomical positions of a patient, which may change after a pre-operative scan. With respect to this, we introduced a method to include these deformed regions in navigation, which are not present in pre-operative scans.
Results
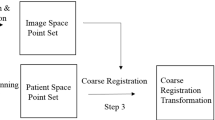
By creating an on-spot 3D surface model of the cadaver’s and phantom’s head, and after registration processes we completed the surgical navigation process with an error (root-mean-square error) of 0.568 mm and 0.791 mm for phantom and cadaver respectively.
Conclusion
We showed the successful surgical navigation by using on-spot 3D surface modeling and including the deformity in our system. The accuracy of registration in lab condition and hospital condition was compared.














Similar content being viewed by others

References
Arnold, B., Wohlrab, D., Meinecke, C., Reuter, D., & Mehner, J. (2018). Design, manufacturing and test of a high-precision mems inclination sensor for navigation systems in robot-assisted surgery. International Journal of Biomedical Science and Engineering, 6(1), 1.
Carfagni, M., Furferi, R., Governi, L., Servi, M., Uccheddu, F., & Volpe, Y. (2017). On the performance of the intel sr300 depth camera: Metrological and critical characterization. IEEE Sensors Journal, 17(14), 4508–4519.
Chen, X., Xu, L., Wang, Y., Wang, H., Wang, F., Zeng, X., et al. (2015). Development of a surgical navigation system based on augmented reality using an optical see-through head-mounted display. Journal of Biomedical Informatics, 55, 124–131.
DiMaio, S., Kapur, T., Cleary, K., Aylward, S., Kazanzides, P., Vosburgh, K., et al. (2007). Challenges in image-guided therapy system design. NeuroImage, 37, S144–S151.
Dlaka, D., Švaco, M., Chudy, D., Jerbić, B., Šekoranja, B., Šuligoj, F., et al. (2018). Brain biopsy performed with the ronna g3 system: A case study on using a novel robotic navigation device for stereotactic neurosurgery. The International Journal of Medical Robotics and Computer Assisted Surgery, 14(1), e1884.
Doba, Nobutaka, Fukuda, Hiroyuki, Numata, Kazushi, Hao, Yoshiteru, Hara, Kouji, Nozaki, Akito, et al. (2018). A new device for fiducial registration of image-guided navigation system for liver rfa. International Journal of Computer Assisted Radiology and Surgery, 13(1), 115–124.
Eggers, G. (2018). Image-guided surgical navigation. Maxillofacial cone beam computed tomography (pp. 1037–1055). New York: Springer.
Ghaffari A, Khorsandi R, & Fatemizadeh E. (2012) Landmark and intensity based image registration using free form deformation. In 2012 IEEE EMBS conference on biomedical engineering and sciences (IECBES), pp. 768–771.
Gu, X., Li, C., Lim, C. M., & Ren, H. (2019). A compliant transoral surgical robotic system based on a parallel flexible mechanism. Annals of Biomedical Engineering, 47, 1–16.
Harkel, T.C., Speksnijder, C.M., Heijden, F., Beurskens, C.H.G., Ingels, K.J.A.O., & Maal, T.J.J. (2017). Depth accuracy of the realsense f200: Low-cost 4d facial imaging. Scientific Reports, 7(1), 16263.
Islam, M., Atputharuban, D. A., Ramesh, R., & Ren, H. (2019). Real-time instrument segmentation in robotic surgery using auxiliary supervised deep adversarial learning. IEEE Robotics and Automation Letters, 4(2), 2188–2195.
Islam, M., Jose, V. J. M., Ren, H., et al. (2019). Glioma prognosis: Segmentation of the tumor and survival prediction using shape, geometric and clinical information. In A. Crimi, S. Bakas, H. Kuijf, F. Keyvan, M. Reyes, & T. van Walsum (Eds.), Brainlesion: Glioma, multiple sclerosis, stroke and traumatic brain injuries (pp. 142–153). Springer: Cham.
Islam, M., Sanghani, P., See Angela, A., James, M. L., King Nicolas, K., & Ren, H. (2019). Intracerebral hemorrhage (ich) segmentation using deep learning. In A. Crimi, S. Bakas, H. Kuijf, F. Keyvan, M. Reyes, & T. van Walsum (Eds.), Brainlesion: Glioma, multiple sclerosis, stroke and traumatic brain injuries (pp. 456–463). Cham: Springer.
Jannin, P., Fitzpatrick, J. M., Hawkes, D., Pennec, X., Shahidi, R., & Vannier, M. (2002). Validation of medical image processing in image-guided therapy. IEEE Transactions on Medical Imaging, 21(12), 1445–9.
Li, C., Gu, X., Xiao, X., Lim, C. M., & Ren, Hongliang. (2019). A robotic system with multi-channel flexible parallel manipulators for single port access surgery. IEEE Transactions on Industrial Informatics, 15(3), 1678–1687.
Li, C., King, N.K.K., Ren Hongliang. (2018) Preliminary development of a skull-mounted lightweight parallel robot toward minimally invasive neurosurgery. In 2018 International symposium on medical robotics (ISMR), pp. 1–6.
Li, C., King, N. K. K., & Ren, H. (2018). A skull-mounted robot with a compact and lightweight parallel mechanism for positioning in minimally invasive neurosurgery. Annals of Biomedical Engineering, 46, 1465–1478.
Li, Z., Liao, W., Haoyong, Y., & Ren, H. (2017). Kinematic comparison of surgical tendon-driven manipulators and concentric tube manipulators. Mechanism and Machine Theory, 107, 148–165.
Min, Z., Ren, H., & Meng, M. Q.-H. (2017). Estimation of surgical tool-tip tracking error distribution in coordinate reference frame involving pivot calibration uncertainty. Healthcare Technology Letters, 4(5), 193–198.
Min, Z., Ren, H., Meng, M.Q-H. (2017) Ttre: A new type of error to evaluate the accuracy of a paired-point rigid registration. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 953–960.
Nadeau, C., Ren, H., Krupa, A., & Dupont, P. E. (2015). Intensity-based visual servoing for instrument and tissue tracking in 3d ultrasound volumes. IEEE Transactions on Automation Science and Engineering, 12(1), 367–371.
Rathgeb, C., Anschuetz, L., Schneider, D., Dür, C., Caversaccio, M., Weber, S., et al. (2018). Accuracy and feasibility of a dedicated image guidance solution for endoscopic lateral skull base surgery. European Archives of Oto-Rhino-Laryngology, 275(4), 905–911.
Ren, H., & Kazanzides, P. (2012). Investigation of attitude tracking using an integrated inertial and magnetic navigation system for hand-held surgical instruments. IEEE/ASME Transactions on Mechatronics, 17(2), 210–217.
Ren, H., Liu, W., & Lim, A. (2014). Marker-based surgical instrument tracking using dual kinect sensors. IEEE Transactions on Automation Science and Engineering, 11(3), 921–924.
Ren, H., & Meng, M.Q.-H. (2006) Rate control to reduce bioeffects in wireless biomedical sensor networks. In 3rd Annual international conference on mobile and ubiquitous systems—workshops, pp. 1–7.
Ren, H., Vasilyev, N.V., & Dupont P.E. (2011) Detection of curved robots using 3d ultrasound. In IROS 2011, IEEE/RSJ international conference on intelligent robots and systems, pp. 2083–2089.
Siena, F. L., Byrom, B., Watts, P., & Breedon, P. (2018). Utilising the intel realsense camera for measuring health outcomes in clinical research. Journal of Medical Systems, 42(3), 53.
Song, S., Li, Z., Ren, H., & Haoyong, Y. (2015). Shape reconstruction for wire-driven flexible robots based on bezier curve and electromagnetic positioning. Mechatronics, 29(99), 28–35.
Sun, Y., Song, S., Liang, X., & Ren, H. (2016). A miniature soft robotic manipulator based on novel fabrication methods. IEEE Robotics and Automation Letters, 1(2), 617–623.
Taylor, A.J., Slutzky, T., Feuerman, L., Ren, H., Tokuda, J., Nilsson, K., & Tse, Z.T.H. (2019). Mr conditional sma-based origami joint. IEEE/ASME Transactions on Mechatronics, pp. 1–8.
Wood, B. J., Zhang, H., Durrani, A., Glossop, N., Ranjan, S., Lindisch, S., et al. (2005). Navigation with electromagnetic tracking for interventional radiology procedures: A feasibility study. Journal of Vascular and Interventional Radiology, 16(4), 493–505.
Wu, K., Zhu, G., Wu, L., Gao, W., Song, S., Lim, C.M. & Ren, H. (2019) Safety-enhanced model-free visual servoing for continuum tubular robots through singularity avoidance in confined environments. IEEE Access, pp. 1–18.
Wu, L., Xiangdon, Y., Chen, K., & Ren, H. (2015). A minimal poe-based model for robotic kinematic calibration with only position measurements. IEEE Transactions on Automation Science and Engineering, 12(2), 758–763.
Yaniv, Z. (2015). Which pivot calibration? In Medical imaging 2015: Image-guided procedures, robotic interventions, and modeling, vol. 9415, p. 941527. International Society for Optics and Photonics.
Zhang, L-x, Zhang, S-t, Xie, H-z, Zhuang, X-h, & Li-xu, G. (2014). Kinect-based automatic spatial registration framework for neurosurgical navigation. Journal of Shanghai Jiaotong University (Science), 19(5), 617–623.
Zhou, C., Anschuetz, L., Weder, S., Xie, L., Caversaccio, M., Weber, S., et al. (2016). Surface matching for high-accuracy registration of the lateral skull base. International Journal of Computer Assisted Radiology and Surgery, 11(11), 2097–2103.
Acknowledgements
The authors would like to acknowledge the support of the National University of Singapore given through the research project-Image Guided Navigation Using Real-Time 3D Surface Scanning. The authors would like to thank the entire team of National University Hospital, Singapore for their help in the clinical procedures.
Funding
This work is supported by National Key Research and Development Program, The Ministry of Science and Technology (MOST) of China (No. 2018YFB1307703), NUSRI China Jiangsu Provincial Grant BE2016077 awarded to Dr. Hongliang Ren.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
The authors declare that they have no conflict of interest.
Ethical Approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Rights and permissions
About this article

Cite this article
Srivastava, A.K., Singhvi, S., Qiu, L. et al. Image Guided Navigation Utilizing Intra-operative 3D Surface Scanning to Mitigate Morphological Deformation of Surface Anatomy. J. Med. Biol. Eng. 39, 932–943 (2019). https://doi.org/10.1007/s40846-019-00475-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40846-019-00475-w