
Abstract
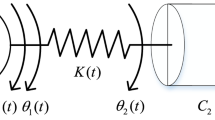
This paper studies the torsional vibration suppression control problem for the nonlinear rolling mill main drive system with performance constraint requirements and unknown measurement sensitivities. Firstly, considering the nonlinear friction between the roll gaps, a torsional vibration model of the main drive system of rolling mill is established. Then, with the asymmetric performance constraints transformation, the motor torque control law is proposed based on backstepping algorithm. By introducing an adaptive bound estimation approach, the multiple unknown parameters caused by the sensor sensitivities can be approximated with very few adaptive laws. The dynamic surface technology is introduced to simplified the control design procedure and solve the computational explosion problem. It is strictly proved that the resulting closed-loop system is stable in the sense of uniformly ultimately boundedness and both transient and steady-state performances of the load speed are preserved. Finally, the simulation is provided to show the validity and the advantages of the proposed techniques.
Similar content being viewed by others

References
J. L. Chen, Z. G. Wang, J. Pan, Y. Y. Zi, Y. Wang, B. Q. Chen, H. L. Sun, J. Yuan, and Z. J. He, “Customized maximal-overlap multiwavelet denoising with data-driven group threshold for condition monitoring of rolling mill drivetrain,” Mechanical Systems and Signal Processing, vol. 68–69, pp. 44–67, February 2016.
L. Liu, N. Shao, S. Y. Ding, and Y. M. Fang, “Command filter-based backstepping control for the speed and tension system of the reversible cold strip rolling mill using disturbance observers,” International Journal of Control Automation and Systems, 2019. DOI:https://doi.org/10.1007/s12555-018-0697-2
P. Belli, S. Bittanti, and A. de Marco, “On the origin of torsional vibrations in hot rolling mills and a possible remedy,” Journal of Dynamic Systems Measurement and Control-Transactions of the ASME, vol. 126, no. 4, pp. 811–823, December 2004.
K. Fujita and T. Saito, “Unstable vibration of roller mills,” Journal of Sound and Vibration, vol. 297, no. 1–2, pp. 329–350, October 2006.
S. Liu, X. Li, Y. Q. Li, and H. B. Li, “Stability and bifurcation for a coupled nonlinear relative rotation system with multi-time delay feedbacks,” Nonlinear Dynamics, vol. 77, no. 3, pp. 923–934, August 2014.
J. L. Sun, Y. Peng, H. M. Liu, and G. B. Jiang, “Vertical vibration of moving strip in rolling process based on beam theory,” Chinese Journal of Mechnical Engineering, vol. 22, no. 5, pp. 680–687, October 2009.
A. Heidari, M. R. Forouzan, and M. R. Niroomand, “Development and evaluation of friction models for chatter simulation in cold strip rolling,” International Journal of Advanced Manufacturing Technology, vol. 96, no. 5–8, pp. 2055–2075, May 2018.
M. Mosayebi, F. Zarrinkolah, and K. Farmanesh, “Calculation of stiffness parameters and vibration analysis of a cold rolling mill stand,” International Journal of Advanced Manufacturing Technology, vol. 91, no. 9–12, pp. 4359–4369, August 2017.
X. B. Fan, Y. Zang, Y. K. Sun, and P. A. Wang, “Impact analysis of roller system stability for four-high mill horizontal vibration,” Shock and Vibration, A.N. 5693584, pp. 1–10, 2016.
Y. Kim, C. W. Kim, S. Lee, and H. Park, “Dynamic modeling and numerical analysis of a cold rolling mill,” International Journal of Precision Engineering and Manufacturing, vol. 14, no. 3, pp. 407–413, March 2013.
Q. Y. Wang, Z. Y. Jiang, J. W. Zhao, and M. Fang, “Multi-factor coupling system characteristic of the dynamic roll gap in the high-speed rolling mill during the unsteady lubrication process,” Tribology International, vol. 67, pp. 174–181, November 2013.
X. Yang and C. N. Tong, “Coupling dynamic model and control of chatter in cold rolling,” Journal of Dynamic Systems Measurement and Control-Transactions of the ASME, vol. 134, no. 4, pp. 041001–1–8, July 2012.
S. Liu, S. S. Zhao, B. Niu, J. X. Li, and H. B. Li, “Stability analysis of a nonlinear electromechanical coupling transmission system with time delay feedback,” Nonlinear Dynamics, vol. 86, no. 3, pp. 1863–1874, November 2016.
L. Q. Zeng, Y. Zang, Z. Y. Gao, K. Liu, and X. C. Liu, “Stability analysis of the rolling mill multiple-modal-coupling vibration under nonlinear friction,” Journal of Vibroengineering, vol. 17, no. 6, pp. 2824–2836, September 2015.
H. Y. Zhao and K. F. Ehmann, “Stability analysis of chatter in tandem rolling mills-part 1: Single-and multi-stand negative damping effect,” Journal of Manufacturing Science and Engineering-Transactions of the ASME, vol. 135, no. 3, pp. 031001–1–7, June 2013.
X. Lu, J. Sun, G. T. Li, Q. L. Wang, and D. H. Zhang, “Dynamic analysis of vibration stability in tandem cold rolling mill,” Journal of Materials Processing Technology, vol. 272, pp. 47–57, October 2019.
S. P. He, H. Y. Fang, M. G. Zhang, F. Liu, X. L. Luan, and Z. D. Ding, “Online policy iterative-based H optimization algorithm for a class of nonlinear systems,” Information Science, vol. 495, pp. 1–13, August 2019.
X. H. Chang and G. H. Yang, “New results on output feedback H control for linear discrete-time systems,” IEEE Trans. Automatic Control, vol. 59, no. 5, pp. 1355–1359, May 2014.
X. H. Chang, C. Yang, and J. Xiong, “Quantized fuzzy output feedback H control for nonlinear system with adjustment of dynamic parameters,” IEEE Trans. on Systems, Man, and Cybernetics: Systems, vol. 49, no. 10, pp. 2005–2015, October 2019.
S. P. He, H. Y. Fang, M. G. Zhang, F. Liu, and Z. D. Ding, “Adaptive optimal control for a class of nonlinear systems: the online policy iteration appraoch,” IEEE Trans. on Neural Networks and Learning Systems, vol. 31, no. 2, pp. 549–558, February 2020.
L. Ma, X. Huo, X. D. Zhao, and G. D. Zong, “Adaptive fuzzy tracking control for a class of uncertain switched nonlinear systems with multiple constraints: a small gain approach,” International Journal of Fuzzy Systems, vol. 21, no. 8, pp. 2609–2624, November 2019.
X. Yang, K. X. Peng, and C. N. Tong, “Robust backstepping control for cold rolling main drive system with nonlinear uncertainties,” Abstract and Applied Analysis, A.N. 387890, pp. 1–7, 2013.
R. C. Zhang and C. N. Tong, “Torsional vibration control of the main drive system of a rolling mill based on an extended state observer and linear quadratic control,” Journal of Vibration and Control, vol. 12, no. 3, pp. 313–327, March 2006.
K. Fujikawa, Z. Q. Yang, H. Kobayashi, and T. Koga, “Robust and fast speed control for torsional system based on state-space method,” Proc. of the Inter. Conf. Industrial Electronics, Control and Instrumentation, pp. 687–692, 1991.
Y. A. Amer, A. T. El-Sayed, and F. T. El-Bahrawy, “Torsional vibration reduction for rolling mill’s main drive system via negative velocity feedback under parametric excitation,” Journal of Mechanical Science and Technology, vol. 29, no. 4, pp. 1581–1589, April 2015.
R. Dhaouadi, K. Kubo, and M. Tobise, “Two-degree-of-freedom robust speed controller for high-performance rolling mill drives,” IEEE Trans. Industry Applications, vol. 29, no. 5, pp. 919–926, October 1993.
C. P. Bechlioulis and G. A. Rovithakis, “Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance,” IEEE Trans. Automatic Control, vol. 53, no. 9, pp. 2090–2099, October 2008.
C. C. Hua, L. L. Zhang, and X. P. Guan, “Decentralized output feedback adaptive NN tracking control for time-delay stochastic nonlinear systems with prescribed performance,” IEEE Trans. Neural Networks and Learning Systems, vol. 26, no. 11, pp. 2749–2759, November 2015.
R. Chang, Y. M. Fang, L. Liu, and K. S. Kang, “Prescribed performance adaptive neural tracking control for strict-feedback Markovian jump nonlinear systems with time-varying delay,” International Journal of Control, Automation, and Systems, vol. 15, no. 3, pp. 1020–1031, June 2017.
B. W. Chen and L. G. Tan, “Adaptive anti-saturation tracking control with prescribed performance for hypersonic vehicle,” International Journal of Control, Automation, and Systems, vol. 18, no. 2, pp. 394–404, February 2020.
Z. Y. Guan, Y. P. Ma, Z. W. Zheng, and N. Guo, “Prescribed performance control for automatic carrier landing with disturbance,” Nonlinear Dynamics, vol. 94, no. 2, pp. 1335–1349, June 2018.
S. I. Han and J. M. Lee, “Prescribed performance fuzzy backstepping control for nonlinear large-scale systems,” International Journal of Control, Automation, and Systems, vol. 13, no. 6, pp. 1508–1520, September 2015.
L. Ma, X. Huo, X. D. Zhao, and G. D. Zong, “Observer-based adaptive neural tracking control for output-constrained switched MIMO nonstrict-feedback nonlinear systems with unknown dead zone,” Nonlinear Dynamics, vol. 99, no. 2, pp. 1019–1036, January 2020.
X. Zhang and W. Lin, “A K-filter-based adaptive control for nonlinear systems with unknown parameters in state and output equations,” Automatica, vol. 105, pp. 186–197, July 2019.
S. Y. Oh and H. L. Choi, “A further result on global stabilization of a class of nonlinear systems by output feedback with unknown measurement sensitivity,” International Journal of Control, Automation, and Systems, vol. 17, no. 10, pp. 2500–2507, October 2019.
Z. Y. Sun, C. Y. Liu, S. F. Su, and W. Sun, “Robust stabilization of high-order nonlinear systems with unknown sensitivities and applications in humanoid robot manipulation,” IEEE Trans. Systems Man and Cybernetics: Systems, 2019. DOI:https://doi.org/10.1109/TSMC.2019.2931768
C. L. Wang and Y. Lin, “Decentralized adaptive tracking control for a class of interconnected nonlinear time-varying systems,” Automatica, vol. 54, pp. 16–24, April 2015.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Recommended by Associate Editor Xiao-Heng Chang under the direction of Editor Guang-Hong Yang. This work was supported in part by the National Key R&D Program of China under Grant 2018YFB1308300, in part by the National Natural Science Foundation of China (61803326, 6182500417, 61751309, 61673335, and 61933009).
Cheng Qian received his B.S. degree in mechanical engineering from Yanshan University, Qinhuangdao, China, in 2014. He is currently working toward a Ph.D. degree in electrical engineering from Yanshan University. His research interests are in dynamic modeling, analysis and control of rolling process.
Liuliu Zhang received her B.S. and Ph.D. degree in electrical engineering from Yanshan University, Qinhuangdao, China, in 2012 and 2018, respectively. She is currently a Lecturer with Electrical Engineering, Yanshan University, China. Her research interests include nonlinear control, constraint control and adaptive control.
Changchun Hua received his Ph.D. degree in electrical engineering from Yanshan University, Qinhuangdao, China, in 2005. He was a research Fellow in National University of Singapore from 2006 to 2007. From 2007 to 2009, he worked in Carleton University, Canada, funded by Province of Ontario Ministry of Research and Innovation Program. From 2009 to 2011, he worked in University of Duisburg-Essen, Germany, funded by Alexander von Humboldt Foundation. Now he is a full Professor in Yanshan University, China. He is the author or coauthor of more than 110 papers in mathematical, technical journals, and conferences. He has been involved in more than 10 projects supported by the National Natural Science Foundation of China, the National Education Committee Foundation of China, and other important foundations. His research interests are in nonlinear control systems, control systems design over network, teleoperation systems and intelligent control.
Rights and permissions
About this article

Cite this article
Qian, C., Zhang, L. & Hua, C. Adaptive Torsional Vibration Control of the Nonlinear Rolling Mill Main Drive System with Performance Constraints and Sensor Errors. Int. J. Control Autom. Syst. 19, 1264–1272 (2021). https://doi.org/10.1007/s12555-020-0092-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-020-0092-7