
Abstract
In this work, the Hopf and Bogdanov–Takens bifurcations of a delayed Bazykin predator–prey model with predator intraspecific interactions and ratio-dependent functional response are studied. Sufficient conditions for the existence of Hopf bifurcation are established. In the Bogdanov–Takens bifurcation, the dynamics near the nonhyperbolic equilibrium can be reduced to the study of the dynamics of the corresponding normal form restricted to the associated two-dimensional center manifold. Some numerical simulations, such as the distribution of eigenvalues, the bifurcation diagrams of Hopf and Bogdanov–Takens bifurcations and phase portraits, are given to illustrate the theoretical criteria. The theoretical and numerical simulation results illustrate that there is supercritical Hopf bifurcation and subcritical Bogdanov–Takens bifurcation in this model. We show that, the dynamics of prey and predator are very sensitive to parameters and delay perturbations which can play a great role in controlling and regulating the number of biological populations.








Similar content being viewed by others

References
Li, S., Yuan, S.L., Jin, Z., Wang, H.: Bifurcation analysis in a diffusive predator–prey model with spatial memory of prey, Allee effect and maturation delay of predator. J. Differ. Equ. 357, 32–63 (2023)
Xiao, Q.Z., Dai, B.X.: Heteroclinic bifurcation for a general predator–prey model with Allee effect and state feedback impulsive control strategy. Math. Biosci. Eng. 12, 1065–1081 (2015)
Hu, D.P., Cao, H.J.: Stability and bifurcation analysis in a predator–prey system with Michaelis–Menten type predator harvesting. Nonlinear Anal. Real World Appl. 33, 58–82 (2017)
Lotka, A.J.: Elements of Physical Biology. Williams and Wilkins, Baltimore (1925)
Volterra, V.: Fluctuations in the abundance of species considered mathematically. Nature 118, 558–560 (1926)
Lu, M., Huang, J.C.: Global analysis in Bazykin’s model with Holling II functional response and predator competition. J. Differ. Equ. 280, 99–138 (2021)
Zhu, H.P., Campbell, S.A., Wolkowicz, G.S.K.: Bifurcation analysis of a predator–prey system with nonmonotonic function response. SIAM J. Appl. Math. 63, 636–682 (2002)
Xiao, D.M., Zhu, H.P.: Multiple focus and Hopf bifurcations in a predator-prey system with nonmonotonic functional response. SIAM J. Appl. Math. 66, 802–819 (2006)
Hsu, S.B., Hwang, T.W., Kuang, Y.: Global analysis of the Michaelis–Menten-type ratio-dependent predator-prey system. J. Math. Biol. 42, 489–506 (2001)
Ruan, S.G., Tang, Y.L., Zhang, W.N.: Versal unfoldings of predator–prey systems with ratio-dependent functional response. J. Differ. Equ. 249, 1410–1435 (2010)
Gao, X.Y., Ishag, S., Fu, S.M., Li, W.J., Wang, W.M.: Bifurcation and Turing pattern formation in a diffusive ratio-dependent predator–prey model with predator harvesting. Nonlinear Anal. Real World Appl. 51, 102962 (2020)
Gutierrez, A.P.: The physiological basis of ratio-dependent predator-prey theory: a metabolic pool model of Nicholson’s blowflies as an example. Ecology 73, 1552–1563 (1992)
Cosner, C., DeAngelis, D.L., Ault, J.S., Olson, D.B.: Effects of spatial grouping on the functional response of predators. Theor. Popul. Biol. 56, 65–75 (1999)
Hu, D.P., Yu, X., Zheng, Z.W., Zhang, C., Liu, M.: Multiple bifurcations in a discrete Bazykin predator–prey model with predator intraspecific interactions and ratio-dependent functional response. Qual. Theor. Dyn. Syst. 22, 99 (2023)
Zhao, X., Zeng, Z.J.: Stochastic dynamics of a two-species patch-system with ratio-dependent functional response. Qual. Theor. Dyn. Syst. 21, 58 (2022)
Arditi, R., Ginzburg, L.R., Akcakaya, H.R.: Variation in plankton densities among lakes: a case for ratio dependent predation models. Am. Nat. 138, 1287–1296 (1991)
Hanski, I.: The functional response of predator: worries about scale. Trends Ecol. Evol. 6, 141–142 (1991)
Bazykin, A.D.: Nonlinear Dynamics of Interacting Populations. World Scientific Series on Nonlinear Science, Series A, vol. 11. World Scientific, Singapore (1998)
Arancibia-Ibarra, C., Aguirre, P., Flores, J., van Heijster, P.: Bifurcation analysis of a predator–prey model with predator intraspecific interactions and ratio-dependent functional response. Appl. Math. Comput. 402, 126152 (2021)
Das, B.K., Sahoo, D., Samanta, G.P.: Impact of fear in a delay-induced predator-prey system with intraspecific competition within predator species. Math. Comput. Simul. 191, 134–156 (2022)
Gupta, A., Kumar, A., Dubey, B.: Complex dynamics of Leslie-Gower prey–predator model with fear, refuge and additional food under multiple delays. Int. J. Biomath. 15, 2250060 (2022)
Benamara, I., El Abdllaoui, A., Mikram, J.: Impact of time delay and cooperation strategyon the stability of a predator-prey model with Holling type III functional response. Int. J. Biomath. 16, 2250089 (2023)
Liu, M., Meng, F.W., Hu, D.P.: Impacts of multiple time delays on a gene regulatory network mediated by small noncoding RNA. Int. J. Bifurc. Chaos 30, 2050069 (2020)
Gakkhar, S., Singh, A.: Complex dynamics in a prey predator system with multiple delays. Commun. Nonlinear Sci. Numer. Simul. 17, 914–929 (2012)
Yafia, R., Aziz-Alaoui, M.A., Merdan, H., Tewa, J.J.: Bifurcation and stability in a delayed predator-prey model with mixed functional responses. Int. J. Bifurc. Chaos 25, 1540014 (2015)
Singh, A., Parwaliya, A., Kumar, A.: Hopf bifurcation and global stability of density-dependent model with discrete delays involving Beddington–DeAngelis functional response. Math. Meth. Appl. Sci. 44, 8838–8861 (2021)
Parwaliya, A., Singh, A., Kumar, A.: Hopf bifurcation in a delayed prey–predator model with prey refuge involving fear effect. Int. J. Biomath. 17, 2350042 (2024)
Hu, D.P., Li, Y.Y., Liu, M., Bai, Y.Z.: Stability and Hopf bifurcation for a delayed predator-prey model with stage structure for prey and Ivlev-type functional response. Nonlinear Dyn. 99, 3323–3350 (2020)
Kundu, S., Maitra, S.: Dynamics of a delayed predator–prey system with stage structure and cooperation for preys. Chaos Solitons Fractals 114, 453–460 (2018)
Dubey, B., Kumar, A., Maiti, A.P.: Global stability and Hopf-bifurcation of prey–predator system with two discrete delays including habitat complexity and prey refuge. Commun. Nonlinear Sci. Numer. Simul. 67, 528–554 (2019)
Dubey, B., Kumar, A.: Dynamics of prey–predator model with stage structure in prey including maturation and gestation delays. Nonlinear Dyn. 96, 2653–2679 (2019)
Das, M., Samanta, G.P.: A delayed fractional order food chain model with fear effect and prey refuge. Math. Comput. Simul. 178, 218–245 (2020)
Li, B., Yuan, Z.M., Eskandari, Z.: Dynamics and bifurcations of a discrete-time Moran–Ricker model with a time delay. Mathematics 11, 2446 (2023)
Eskandari, Z., Alidousti, J., Avazzadeh, Z.: Rich dynamics of discrete time-delayed Moran–Ricker model. Qual. Theor. Dyn. Syst. 22, 98 (2023)
Hadadi, J., Alidousti, J., Khoshsiar Ghaziani, R., Eskandari, Z.: Bifurcations and complex dynamics of a two dimensional neural network model with delayed discrete time. Math. Meth. Appl. Sci. (2023). https://doi.org/10.1002/mma.9569
Naik, P.A., Eskandari, Z.: Nonlinear dynamics of a three-dimensional discrete-time delay neural network. Int. J. Biomath. 17, 2350057 (2024)
Liu, M., Meng, F.W., Hu, D.P.: Bogdanov–Takens and Hopf bifurcations analysis of a genetic regulatory network. Qual. Theor. Dyn. Syst. 21, 45 (2022)
Tridane, A., Yafia, R., Aziz-Alaoui, M.A.: Targeting the quiescent cells in cancer chemotherapy treatment: Is it enough? Appl. Math. Model 40, 4844–4858 (2016)
Kayan, Ş, Merdan, H., Yafia, R., Goktepe, S.: Bifurcation analysis of a modified tumor-immune system interaction model involving time delay. Math. Model. Nat. Phenom. 12, 120–145 (2017)
Najm, F., Yafia, R., Aziz-Alaoui, M.A.: Hopf bifurcation in oncolytic therapeutic modeling: viruses as anti-tumor means with viral lytic cycle. Int. J. Bifurc. Chaos 32, 2250171 (2022)
Liu, Y.W., Liu, Z.R., Wang, R.Q.: Bogdanov–Takens bifurcation with codimension three of a predator-prey system suffering the additive Allee effect. Int. J. Biomath. 10, 1750044 (2017)
Xu, Y., Huang, M.: Homoclinic orbits and Hopf bifurcations in delay differential systems with T-B singularity. J. Differ. Equ. 244, 582–598 (2008)
Jiao, J.F., Chen, C.: Bogdanov–Takens bifurcation analysis of a delayed predator–prey system with double Allee effect. Nonlinear Dyn. 104, 1697–1707 (2021)
Coccolo, M., Zhu, B.B., Sanjuán, M.A.F., Sanz-Serna, J.M.: Bogdanov–Takens resonance in time-delayed systems. Nonlinear Dyn. 91, 1939–1947 (2018)
Jiang, J., Song, Y.L.: Delay-induced Bogdanov–Takens bifurcation in a Leslie–Gower predator–prey model with nonmonotonic functional response. Commun. Nonlinear Sci. Numer. Simul. 19, 2454–2465 (2014)
Hu, D.P., Cao, H.J.: Stability and Hopf bifurcation analysis in Hindmarsh-Rose neuron model with multiple time delays. Int. J. Bifurc. Chaos 26, 1650187 (2016)
Engelborghs, K.: DDE-BIFTOOL: a Matlab package for bifurcation analysis of delay differential equations. Tech. Rep. TW-305, Department of Computer Science, K. U. Leuven, Leuven, Belgium (2000)
Engelborghs, K., Luzyanina, T., Roose, D.: Numerical bifurcation analysis of delay differential equations using DDE-BIFTOOL. ACM Trans. Math. Softw. 28, 1–21 (2002)
Faria, T., Magalhães, L.T.: Normal forms for retarded functional differential equations and applications to Bogdanov–Takens singularity. J. Differ. Equ. 122, 201–224 (1995)
Kuznetsov, Y.A.: Elements of Applied Bifurcation Theory(3rd). Springer, New York (2004)
Hale, J.K., Lunel, S.M.V.: Introduction to Functional Differential Equations. Springer, New York (1993)
Sternberg, N.: A Hartman–Grobman theorem for a class of retarded functional differential equations. J. Math. Anal. Appl. 176, 156–165 (1993)
Naik, P.A., Eskandari, Z., Yavuz, M., Zu, J.: Complex dynamics of a discrete-time BazykinBerezovskaya prey–predator model with a strong Allee effect. J. Comput. Appl. Math. 413, 114401 (2022)
Cushing, J.M., Martins, F., Pinto, A.A., Veprauskas, A.: A bifurcation theorem for evolutionary matrix models with multiple traits. J. Math. Biol. 75, 491–520 (2017)
Zhang, Z.F., Dong, T.R., Huang, W.Z., Dong, Z.X.: Qualitative Theory of Differential Equations, Science Press, Beijing, (in Chinese): English edition: Transl. Math. Monogr., 101 (Amer. Math. Soc., Providence, RI) (1992)
Acknowledgements
This work is supported by NSF of Shandong Province (ZR2023QA003, ZR2023MA023, ZR2021MA016), National Natural Science of China (61973183), China Postdoctoral Science Foundation (2019M652349), and the Youth Creative Team Sci-Tech Program of Shandong Universities (2019KJI007).
Author information
Authors and Affiliations
Contributions
ML and DH wrote the main manuscript text and ZZ and C-QM prepared the all figures. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Stability of \(E_0\) and \(E_1\)
Appendix: Stability of \(E_0\) and \(E_1\)
In this Appendix, we will discuss the stability of the equilibria \(E_0\) and \(E_1\).
Lemma A.1
The equilibrium \(E_0(0,0)\) is unstable.
Proof
We can evaluate (2.3) directly at \(E_0(0,0)\)
The eigenvalues are \(\lambda _1=1>0\), \(\lambda _2= -\alpha <0\). Obviously, \(E_0\) is a saddle which is unstable. Furthermore, the stable manifold of \(E_0\) is spanned by \(\vec {v} = (0,1)\) and the unstable manifold is spanned by \(\vec {w} = (1,0)\). \(\square \)
Remark 8
The equilibrium \(E_0(0,0)\) is often called the extinction equilibrium. The fundamental importance for a biological population is its avoidance of extinction. It will threaten the model population with extinction if the extinction equilibrium is locally asymptotically stable, whereas it will open the possibility of population persistence if the extinction equilibrium is unstable [54]. Hence, the extinction equilibrium \(E_0(0,0)\) is a saddle which can guarantee persistence of the species.
Lemma A.2
For the equilibrium \(E_1(1,0)\),
-
(I)
It is a stable node if \(C<1\).
-
(II)
It is an unstable saddle if \(C>1\).
-
(III)
It is non-hyperbolic if \(C=1\).
Proof
We can evaluate (2.3) directly at \(E_1(1,0)\)
The eigenvalues are \(\lambda _1=-1\) and \(\lambda _2= \alpha (C-1)\). Hence
(I) If \(C<1\), we have \(\lambda _1 <0\), \(\lambda _2 <0\), then \(E_1\) is stable.
(II) If \(C>1\), we can obtain \(\lambda _2 >0\), then \(E_1\) is a saddle which is unstable. The stable manifold of the saddle is spanned by \(\vec {v} = (1,0)\). Hence, all trajectories flow (x(t), y(t)) with initial values located in \(\{(x,y)|0\le x <1,y=0\}\) will toward equilibrium \(E_1\).
(III) If \(C=1\), we can obtain \(\lambda _1 <0\), \(\lambda _2 =0\), then \(E_1\) is non-hyperbolic.
To further determine the nature of non-hyperbolic equilibrium, we will analyze the stability of \(E_1\) of the delay-free model when \(C=1\) since time delay cannot affect the stability of \(E_1\). When \(C=1\), the delay-free model is
First, we transfer the equilibrium \(E_1\) of model (A.1) to the origin by the transformation \((u_1,v_1) = (x-1,y)\) and expand it in a Taylor series
where \(h_1(u_1,v_1)\) and \(h_2(u_1,v_1)\) are power series in \((u_1,v_1)\) with terms \(u_1^iv_1^j\) satisfying \(i+j\ge 5\).
Let
be the matrix that transforms the matrix J into Jordan canonical form. Then, under the transformation
map (A.2) becomes
where \(h_3(u_2,v_2)\) and \(h_4(u_2,v_2)\) are power series in \((u_2,v_2)\) with terms \(u_2^iv_2^j\) satisfying \(i+j\ge 5\).
Letting \(\tau = -t\), \(x = v_2\), \(y = u_2\) and rewriting \(\tau \) as t, then model (A.3) becomes
where \(h_5(x,y) = - h_4(y,x)\), \(h_6(x,y) = -h_3(y,x)\).
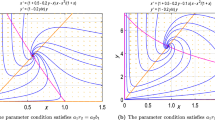
Using the notations of Theorem 7.1 in Chapter 2 in [55], we obtain \(m=2\) and \(a_m = -\frac{\alpha (\beta + 1)}{Q} < 0\), then the origin of (A.4) is a saddle node. That is, a neighborhood of the origin of (A.4) is divided into two parts by two separatrices that tend to the origin along the positive and negative of y-axes. One part is a parabolic sector, and the other part consists of two hyperbolic sectors. Since \(a_m<0\), then the parabolic sector is on the left halfplane. Combining all of the above transformations, we know that the parabolic sector for \(E_1\) of (2.1) is on the upper halfplane of the x-axis and the flow will move toward \(E_1\) when the initial point is selected in the region \(\Omega = \{(x,y)|0\le x \le 1,y>0\}\). Hence, \(E_1\) is a non-hyperbolic saddle-node which includes a stable parabolic sector lies in the domain \(\Omega \), see Fig. 8(a). \(\square \)
Remark 9
In fact, we know that model (2.1) will undergo a static bifurcation if the eigenvalue passes through the imaginary axis along the real axis. When \(C=1\), \(\lambda = 0\) is one of the eigenvalues of \(E_1\). There is a transcritical bifurcation at the bifurcation point \(C=1\). Here we only give the result of the numerical continuation and omit the process of deriving the normal form of transcritical bifurcation. The corresponding bifurcation diagram is shown in Fig. 8b. Since we need \(0\le x \le 1\), the red dotted line in Fig. 8b only represents unstable equilibria in the mathematical sense, while the red solid line represents biologically unstable equilibria. The blue line stands for stable equilibria.
Remark 10
The boundary equilibrium \(E_1(1,0)\) is called the predator extinction equilibrium. Under certain condition(such as \(C<1\), see Fig. 8b), the predator extinction equilibrium is stable which means that the prey population persists while the predator population becomes extinct. Unless an apex predator invade an ecosystem with no predators, we do not want predators to go extinct. That is, in generally, such stability should be avoided for the sake of ecosystem persistence. On the other hand, from the proof of Lemma A.2 and Fig. 8b we can see that when \(C > 1\), \(E_1\) is an unstable saddle. The biological significance is that when the energy conversion efficiency c is greater than the death rate of predators \(\mu _0\)(see the expression of C), predators can avoid extinction.

a \(E_1(1,0)\) is a non-hyperbolic saddle-node which includes a stable parabolic sector lies in the domain \(\Omega \) when \(Q = 1.3\), \(\alpha = 0.8\), \(\beta = 1.3\), \(\tau = 5\) and \(C = 1\). The parabolic sector for \(E_1\) of (2.1) is on the upper halfplane of the x-axis. b The transcritical bifurcation diagram with C variation and other parameters are the same as (a)
As can be seen from the above, the stability of \(E_0\) and \(E_1\) is also independent of the time delay.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liu, M., Zheng, Z., Ma, CQ. et al. Hopf and Bogdanov–Takens Bifurcations of a Delayed Bazykin Model. Qual. Theory Dyn. Syst. 23, 138 (2024). https://doi.org/10.1007/s12346-024-00996-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-024-00996-z