
Abstract
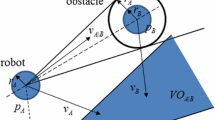
The Velocity obstacle (VO) method is one of the most well-known methods for local path planning, allowing consideration of dynamic obstacles and unexpected obstacles. Typical VO methods separate a velocity map into a collision area and a collision-free area. A robot can avoid collisions by selecting its velocity from within the collision-free area. However, if there are numerous obstacles near a robot, the robot will have very few velocity candidates. In this paper, a method for choosing optimal velocity components using the concept of pass-time and vertical clearance is proposed for the efficient movement of a robot. The pass-time is the time required for a robot to pass by an obstacle. By generating a latticized available velocity map for a robot, each velocity component can be evaluated using a cost function that considers the pass-time and other aspects. From the output of the cost function, even a velocity component that will cause a collision in the future can be chosen as a final velocity if the pass-time is sufficiently long enough.
Similar content being viewed by others


References
O. Khatib, Real-time obstacle avoidance for manipulators and mobile robots, The International Journal of Robotics Research 5.1 (1986) 90–98.
H. Choset et al., Sensor-based exploration: incremental construction of the hierarchical generalized Voronoi graph, The International Journal of Robotics Research, 19 (2) (2000) 126–148.
J. Kim, M. Kim and D. Kim, Variants of the Quantized Visibility Graph for Efficient Path Planning, Advanced Robotics, 25 (18) (2011) 2341–2360.
Y. Koren and J. Borenstein, Potential field methods and their inherent limitations for mobile robot navigation, Robotics and Automation, Proceedings., 1991 IEEE International Conference on., IEEE (1991).
K. H. Sedighi et al., Autonomous local path planning for a mobile robot using a genetic algorithm, Evolutionary Computation, CEC 2004 Congress on, IEEE, 2 (2004).
D. Fox, W. Burgard and S. Thrun, The dynamic window approach to collision avoidance, IEEE Robotics & Automation Magazine, 4 (1) (1997) 23–33.
Y. Abe and M. Yoshiki, Collision avoidance method for multiple autonomous mobile agents by implicit cooperation, Intelligent Robots and Systems, Proceedings of 2001 IEEE/RSJ International Conference on., IEEE, 3 (2001).
S. J. Guy et al., Clearpath: highly parallel collision avoidance for multi-agent simulation, Proceedings of the 2009 ACM SIGGRAPH/Eurographics Symposium on Computer Animation. ACM (2009).
D. Wilkie, J. van den Berg and D. Manocha, Generalized velocity obstacles, Intelligent Robots and Systems, IROS 2009 IEEE/RSJ International Conference on., IEEE (2009).
J. Snape et al., Independent navigation of multiple mobile robots with hybrid reciprocal velocity obstacles, Intelligent Robots and Systems, IROS 2009 IEEE/RSJ International Conference on, IEEE (2009).
F. Large et al., Using non-linear velocity obstacles to plan motions in a dynamic environment, Control, Automation, Robotics and Vision, ICARCV 2002 7th International Conference on, IEEE, 2 (2002).
V. den Berg ffixJr., M. Lin and D. Manocha, Reciprocal velocity obstacles for real-time multi-agent navigation, Robotics and Automation, ICRA 2008 IEEE International Conference on, IEEE (2008).
C. Fulgenzi, A. Spalanzani and C. Laugier, Dynamic obstacle avoidance in uncertain environment combining PVOs and occupancy grid, Robotics and Automation, 2007 IEEE International Conference on, IEEE (2007).
P. Fiorini and Z. Shiller, Motion planning in dynamic environments using the relative velocity paradigm, IEEE Conference on Robotics and Automation (1993) 560–565.
P. Fiorini and Z. Shiller, Motion planning in dynamic environments using velocity obstacles, The International Journal of Robotics Research, 17 (7) (1998) 760–772.
O. V. Stryk and R. Bulirsch, Direct and indirect methods for trajectory optimization, Annals of Operations Research, 37 (1) (1992) 357–373.
J. T. Betts, Survey of numerical methods for trajectory optimization, Journal of Guidance, Control, and Dynamics, 21 (2) (1998) 193–207.
D. J. Kwak, B. Choi and H. J. Kim, Trajectory Optimization Using Virtual Motion Camouflage and Particle Swarm Optimization, Intelligent Robotics and Applications, Springer Berlin Heidelberg (2013) 594–604.
S. M. LaValle and J. J. Kuffner ffixJr., Rapidly-exploring random trees: Progress and prospects (2000).
Y. Tamura, T. Fukuzawa and H. Asama, Smooth collision avoidance in human-robot coexisting environment, Intelligent Robots and Systems (IROS), 2010 IEEE/RSJ International Conference on, IEEE (2010).
A. Schadschneider et al., Evacuation dynamics: Empirical results, modeling and applications, Encyclopedia of complexity and systems science, Springer New York (2009) 3142–3176.
N. Pelechano, J. M. Allbeck and N. I. Badler, Virtual crowds: Methods, simulation, and control, Synthesis Lectures on Computer Graphics and Animation, 3 (1) (2008) 1–176.
S. Thompson, T. Horiuchi and S. Kagami, A probabilistic model of human motion and navigation intent for mobile robot path planning, Autonomous Robots and Agents, ICARA 2009 4th International Conference on, IEEE (2009).
S. Kim et al., Predicting pedestrian trajectories using velocity-space reasoning, Algorithmic Foundations of Robotics X, Springer Berlin Heidelberg (2013) 609–623.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Kyoungchul Kong
Mingeuk Kim received his B.S. and M.S. degrees in Mechanical Engineering from the Korea Advanced Institute of Science and Technology (KAIST), Daejeon, South Korea, in 2008 and 2010, respectively. He is currently a graduate student in the Ph.D. course in the Department of Mechanical Engineering, KAIST. His research interests include the control of rapid mobile robots and the navigation of mobile robots.
Jun-Ho Oh received his B.S. and M.S. degrees in Mechanical Engineering from Yonsei University, Seoul, South Korea, and his Ph.D. degree in Mechanical Engineering from the University of California, Berkeley, in 1977, 1979 and 1985, respectively. Since 1985, he has been with the Department of Mechanical Engineering, Korea Advanced Institute of Science and Technology (KAIST), where he is currently a vice president of KAIST and a Professor and a Director of the Humanoid Robot Research Center. His research interests include humanoid robots, sensors, actuators and applications of microprocessors. He is a member of the IEEE, KSME, KSPE, and ICROS.
Rights and permissions
About this article

Cite this article
Kim, M., Oh, J. Development of an optimal velocity selection method with velocity obstacle. J Mech Sci Technol 29, 3475–3487 (2015). https://doi.org/10.1007/s12206-015-0746-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-015-0746-1