
Abstract
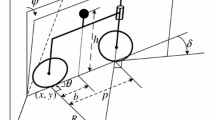
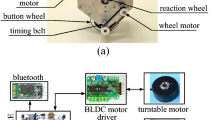
A new velocity and balance control algorithm for the RWBR (Reaction wheel bicycle robot) has been proposed in this paper. A reaction wheel is adopted to maintain a balance while the RWBR is driving, which allows the process of controlling the speed to be achieved concurrently with the one of controlling the balance. To control the speed of the bicycle robot, a PID control algorithm with the adjustment of variable gains is developed in this study, where the gains are heuristically adjusted during each experiment. For the control of the balance and stability, a roll controller is designed by using the model-based algorithm to provide the shortest possible cycle for the bicycle controller. The roll angle is measured to maintain the desired acceleration which generates the reaction force to keep the total force acting on the bicycle robot inside the friction cone. The desired roll acceleration is decided for the bicycle robot in order to prevent it from falling down to the floor with the minimum usage of the reaction wheel rotation. For the general driving of the bicycle robot such as the S-curved driving, the dynamic forces of centrifugal, gravity and steering change are modeled and the friction on the floor has been estimated. The performance of the designed control system is verified through the real experiments with the developed RWBR.
Similar content being viewed by others

References
Y. Huang, Q. Liao, S. Wei and L. Guo, Dynamic modeling of a bicycle robot with front-wheel drive based on Kane’s method, Proceedings of the 2010 IEEE International Conference on Information and Automation (2010) 758–764.
Y. Zhang, J. Li, J. Yi and D. Song, Balance control and analysis of stationary riderless motorcycles, IEEE International Conference on Robotics and Automation (2011) 3018–3023.
T. Chang, P. Jaroonsiriphan, M. Bernhardt and P. Ludden, Web-based command shaping of Cobra 600 robot with a swinging load, IEEE Trans. Ind. Informat, 2 (1) (2006) 59–69.
J. Yi, D. Song, A. Levandowski and S. Jayasuriya, Trajectory tracking and balance stabilization control of autonomous motorcycles, Robotics and Automation, 2006. ICRA 2006. Proceedings 2006 IEEE International Conference on (2006) 2583–2589.
D. Liu, W. Guo and W. Wang, Second-order sliding mode tracking control for the piezoelectric actuator with hysteretic nonlinearity, Journal of Mechanical Science and Technology, 27 (1) (2013) 199–205.
P. Y. Lam and T. K. Sin, Gyroscopic stabilization of a selfbalancing robot bicycle, International Journal of Automation Technology, 5 (6) (2011) 916–923.
M. Yamakita and A. Utano, Automatic control of bicycles with a balancer, 2005 IEEE/ASME International Conference on (2005) 1245–1250.
T. D. Viet, P. T. Doan, N. Hung, H. K. Kim and S. B. Kim, Tracking control of a three-wheeled omnidirectional mobile manipulator system with disturbance and friction, Journal of Mechanical Science and Technology, 26 (7) (2012) 2197–2211.
S. Lee and W. Ham, Self-stabilizing strategy in tracking control of unmanned electric bicycle with mass balance, IEEE International Conference on Intelligent Robots and Systems (2002) 2200–2205.
T. T. Bui, M. Parnichkun and C. H. Le, Structure-specified H8 loop shaping control for balancing of bicycle robots: A particle swarm optimization approach, Proceedings of the Institution of Mechanical Engineers, 224 (7) (2010) 857–867.
Y. Zhang, P. Wang, J. Yi, D. Song and T. Liu, Stationary balance control of a bikebot, Robotics and Automation, 2014. ICRA 2014. Proceedings 2014 IEEE International Conference on (2014) 6706–6711.
A. V. Lenskii and A. M. Formal’skii, Gyroscopic stabilization of a two-wheeled robot bicycle, Doklady Mathematics, 70 (3) (2004) 993–997.
S.-H. Joo, J.-H. Lee, Y.-W. Park, W. S. Yoo and J. Lee, Real time traversability analysis to enhance rough terrain navigation for an 6?6 autonomous vehicle, Journal of Mechanical Science and Technology, 27 (4) (2013) 1125–1134.
S. Anan, Balancing control of bicycle robot, Cyber Technology in Automation, Contro, and Intelligent Systems (CYBER) 2012 IEEE International Conference on (2012) 69–73.
L. Keo, K. Yoshino, M. Kawaguchi and M. Yamakita, Experimental results for stabilizing of a bicycle with a flywheelbalancer, Robotics and Automation (ICRA) 2011 IEEE International Conference on (2011) 6150–6155.
K. N. Srinias and L. Behera, Swing-up control strategies for a reaction wheel pendulum, Int. J. Syst. Sci., 39 (12) (2008) 1165- 1177.
Y. Tanaka and T. Murakami, Self sustaining bicycle robot with steering controller, Advanced Motion Control, 2004. AMC’ 04. The 8th IEEE International Workshop on (2004) 193–197.
K. A. Fischer and P. Wriggers, Mortar based frictional contact formulation for higher order interpolations using the moving friction cone, Computer Methods in Applied Mechanics and Engineering, 195 (37–40) (2006) 5020–5036.
S. Kang and J. Lee, LQR controller design for balancing and driving control of a bicycle robot, Journal of Institute of Control, Robotics and Systems, 20 (5) (2014) 551–556.
S. Lee, I. Lee, M. Kim, H. He and J. M. Lee, Balancing and driving control of a bicycle robot, Journal of Institute of Control, Robotics and Systems, 18 (6) (2012) 532–539.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Senior Editor Jong Hyeon Park
Yun K. Kim received his M.S. degree in Electrical Engineering from the Pusan National University, Republic of Korea in 2013. He is currently doing a Ph.D. course in Electrical and Computer Engineering from the Pusan National University, Republic of Korea. His research interests include Biped robot control, Intelligent Control, Navigation & Localization, SLAM and Haptics.
Hyun W. Kim received his M.S. degree in Electrical Engineering from the Pusan National University, Republic of Korea in 2013. He is currently doing a Ph.D. course in Electrical and Computer Engineering from the Pusan National University, Republic of Korea. His research interests include Intelligent Control, Navigation & Localization and SLAM.
Jang M. Lee received the B.S. and M.S. degrees in electronic engineering from Seoul National University, Seoul, Korea, in 1980 and 1982, respectively, and the Ph.D. degree in computer engineering from the University of Southern California, Los Angeles, CA, USA, in 1990. Since 1992, he has been a Professor with Pusan National University, Busan, Korea, where he was the Leader of the Brain Korea 21 Project. His research interests include intelligent robotics, advanced control algorithm, and specialized environment navigation/localization. Dr. Lee was the former President of the Korean Robotics Society. He is a Member of the Industrial Electronics Society.
Rights and permissions
About this article

Cite this article
Kim, Y., Kim, H. & Lee, J. Stable control of the bicycle robot on a curved path by using a reaction wheel. J Mech Sci Technol 29, 2219–2226 (2015). https://doi.org/10.1007/s12206-015-0442-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12206-015-0442-1