
Abstract
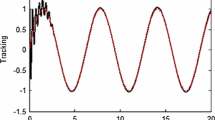
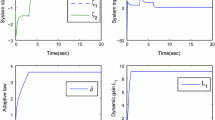
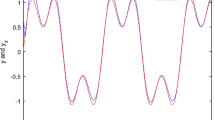
An adaptive iterative learning control scheme is presented for a class of strict-feedback nonlinear time-delay systems, with unknown nonlinearly parameterised and time-varying disturbed functions of known periods. Radial basis function neural network and Fourier series expansion (FSE) are combined into a new function approximator to model each suitable disturbed function in systems. The requirement of the traditional iterative learning control algorithm on the nonlinear functions (such as global Lipschitz condition) is relaxed. Furthermore, by using appropriate Lyapunov-Krasovskii functionals, all signs in the closed loop system are guaranteed to be semiglobally uniformly ultimately bounded, and the output of the system is proved to converge to the desired trajectory. A simulation example is provided to illustrate the effectiveness of the control scheme.
Similar content being viewed by others
References
M. French, E. Rogers. Non-linear iterative learning by an adaptive Lyapunov technique. International Joural of Control, vol. 73, no. 10, pp. 840–850, 2000.
J. Y. Choi, J. S. Lee. Adaptive iterative learning control of uncertain robotic systems. IEE Proceedings — Control Theory and Applications, vol. 147, no. 2, pp. 217–223, 2000.
D. H. Owens. Universal iterative learning control using adaptive high gain feedback. International Journal of Adaptive Control and Signal Processing, vol. 7, pp. 383–388, 1993.
J. X. Xu, B. Viswanathan. Adaptive robust iterative learning control with dead zone scheme. Automatica, vol. 36, no. 1, pp. 91–99, 2000.
J. X. Xu, Y. Tan. A composite energy function-based learning control approach for nonlinear systems with timevarying parametric uncertainties. IEEE Transactions on Automatic Control, vol. 47, no. 11, pp. 1940–1945, 2002.
A. Tayebi, C. J. Chien. A unified adaptive iterative learning control framework for uncertain nonlinear systems. IEEE Transactions on Automatic Control, vol. 52, no. 10, pp. 1907–1913, 2007.
J. M. Li, K. Y. Xing, P. L. Li. Hybrid adaptive iterative learning control for time-varying nonlinear systems. Dynamics of Continuous Discrete and Impulsive Systems: Series A — Mathematical Analysis, vol. 14, no. S3, pp. 383–387, 2007.
W. S. Chen, J. M. Li. Adaptive output-feedback regulation for nonlinear delayed systems using neural network. International Journal of Automation and Computing, vol.5, no. 1, pp. 103–108, 2008.
W. S. Chen. Novel adaptive learning control of linear systems with completely unknown time delays. International Journal of Automation and Computing, vol. 6, no. 2, pp. 177–185, 2009.
G. Ji, Q. Luo. An open-closed-loop PID-type iterative learning control algorithm for uncertain time-delay systems. In Proceedings of the 4th International Conference on Machine Learning and Cybernetics, IEEE, Guangzhou, PRC, vol. 2, pp. 1154–1159, 2005.
X. D. Li, T. W. S. Chow, J. K. L. Ho. 2-D system theory based iterative learning control for linear continuous systems with time delays. IEEE Transactions on Circuits and Systems I: Regular Papers, vol. 52, no. 7, pp. 1421–1430, 2005.
K. H. Park, Z. Bien, D. H. Hwang. Design of an iterative learning controller for a class of linear dynamic systems with time delays. IEE Proceedings — Control Theory and Applications, vol. 145, no. 6, pp. 507–512, 1998.
G. Ji, F. Wang. Adaptive iterative learning control of nonlinear time-delay systems using neural network. In Proceedings of IEEE International Conference on Control and Automation, IEEE, Guangzhou, PRC, pp. 2648–2653, 2007.
W. S. Chen. Adaptive backstepping dynamic surface control for systems with periodic disturbances using neural networks. IET Control Theory and Applications, vol. 3, no. 10, pp. 1383–1394, 2009.
W. S. Chen, L. C. Jiao, R. H. Li, J. Li. Adaptive backstepping fuzzy control for nonlinearly parameterized systems with periodic disturbances. IEEE Transactions on Fuzzy Systems, vol. 18, no. 4, pp. 674–685, 2010.
S. Zhu, M. X. Sun, X. X. He. Iterative learning control of strict-feedback nonlinear time-varying systems. Acta Automatica Sinica, vol. 36, no. 3, pp. 454–458, 2010. (in Chinese)
S. Liuzzo, R. Marino, P. Tomei. Adaptive learning control of nonlinear systems by output error feedback. IEEE Transactions on Automatic Control, vol. 52, no. 7, pp. 1232–1248, 2007.
J. Park, I. W. Sandberg. Universal approximation using radial-basis-function networks. Neural Computation, vol.3, no. 2, pp. 246–157, 1991.
K. Hornik, M. Stinchcome, H. White. Multilayer feedforward networks are universal approximators. Neural Networks, vol. 2, no. 5, pp. 359–366, 1989.
S. S. Ge, F. Hong, T. H. Lee. Adaptive neural network control of nonlinear systems with unknown delays. IEEE Transactions on Automatic Control, vol. 48, no. 11, pp. 2004–2010, 2003.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported by National Natural Science Foundation of China (No. 72103676) (partially supported by the Fundamental Research Funds for the Central Universities).
Chun-Li Zhang graduated from Linyi Normal University, PRC in 2007. She received the M. S. degree from Xidian University in 2010. She is currently a Ph.D. candidate at the Department of Applied Mathematics, Xidian University.
Her research interests include adaptive iterative learning control, neural network, robust control, and chaos synchronization.
Jun-Min Li graduated from Xidian University, PRC in 1987. He received the M. S. degree from Xidian University in 1990 and the Ph.D. degree from Xi’an Jiaotong University, PRC in 1997. He is currently a professor at the Department of Applied Mathematics, Xidian University.
His research interests include adaptive control, learning control, intelligent control, hybrid system control theory, and the networked control systems.
Rights and permissions
About this article
Cite this article
Zhang, CL., Li, JM. Adaptive iterative learning control for nonlinear time-delay systems with periodic disturbances using FSE-neural network. Int. J. Autom. Comput. 8, 403–410 (2011). https://doi.org/10.1007/s11633-011-0597-x
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-011-0597-x