
Abstract
Purpose
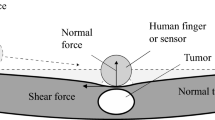
Laparoscopic surgery limits a surgeon’s tactile sense. A tactile sensor could allow real-time tumor detection in laparoscopic surgery through lump inspection. This study was aimed at developing a simple and biocompatible tactile sensor for laparoscopic surgery. The proposed tactile sensor has a forceps-like shape, has no electrical elements in the tissue contact area, and can be sterilized and cleaned.
Methods
We developed a tactile sensor using acoustic reflection. It is composed of a handle with a speaker and a microphone, an aluminum tube, and a sensor tip with a deformable elastic cavity. The acoustic wave in the tube is the superposition of the input wave and two waves reflected at the closed edge and the projection generated by deformation due to contact with an object. By measuring the acoustic wave in the tube, information of the deformation is derived.
Results
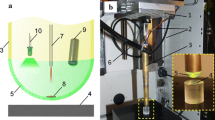
The sensor is modeled, and the output is analyzed to determine design parameters of the sensor. Then, a prototype of the sensor is assembled. Fundamental experiments show that the sensor output increases with increasing normal deformation. Moreover, experiments using a phantom of the stomach wall with a 0-IIc type tumor (most common early stage gastric cancer) show that large sensor output is obtained for the lump when the sensor is moved across the back surface of the tumor.
Conclusions
The theoretical and experimental results show that the sensor is sensitive to the deformation due to contact with an object and has the potential to detect a lump in laparoscopic surgery.
















Similar content being viewed by others
References
Hoyt K, Castaneda B, Zhang M, Nigwekar P, di Sant’agnese PA, Joseph JV, Strang J, Rubens DJ, Parker KJ (2008) Tissue elasticity properties as biomarkers for prostate cancer. Cancer Biomark 4(4–5):213–225
Krouskop TA, Wheeler TM, Kallel F, Garra BS, Hall T (1998) Elastic moduli of breast and prostate tissues under compression. Ultrason Imaging 20(4):260–274
Phipps S, Yang TH, Habib FK, Reuben RL, McNeill SA (2005) Measurement of tissue mechanical characteristic to distinguish between benign and malignant prostatic disease. Urology 66(2):447–450
Puangmali P, Althoefer K, Seneviratne LD, Murphy D, Dasgupta P (2008) State-of-the-art in force and tactile sensing for minimally invasive surgery. IEEE Sens J 8(4):371–381
Yoneyama T, Watanabe T, Kagawa H, Hamada J, Hayashi Y, Nakada M (2013) Force-detecting gripper and force feedback system for neurosurgery applications. Int J CARS 8(5):819–829
Sokhanvar S, Packirisamy M, Dargahi J (2007) A multifunctional PVDF-based tactile sensor for minimally invasive surgery. Smart Mater Struct 16:989–998
Tanaka M, Iijima T, Tanahashi Y, Chonan S (2007) Development of a 3D tactile sensor. J Mater Process Technol 181(1–3):286–290
Peirs J, Clijnen J, Reynaerts D, Brussel HV, Herijgers P, Corteville B, Boone S (2004) A micro optical force sensor for force feedback during minimally invasive robotic surgery. Sens Actuators A Phys 115(2–3):447–455
Takaki T, Omasa Y, Ishii I, Kawahara T, Okajima M (2010) Force visualization mechanism using a moire fringe applied to endoscopic surgical instruments. In: Proceedings of the IEEE international conference on robotics and automation, pp 3648–3653
Takashima K, Yoshinaka K, Ikeuchi K (2007) Vision-based tactile sensor for endoscopy. In: Wu JL, Ito K, Tobimatsu S, Nishida T, Fukuyama H (eds) Complex medical engineering. Springer, Japan, pp 13–23
Lindahl OA, Constantinou CE, Eklund A, Murayama Y, Hallberg P, Omata S (2009) Tactile resonance sensors in medicine. J Med Eng Technol 33(4):263–273
Kaneko M, Kawahara T, Tanaka S (2004) Non-contact stiffness imager. In: Proceedings of the IEEE international conference on robotics and automation, vol 2, pp 1562–1567
Tanaka Y, Yu Q, Doumoto K, Sano A, Hayashi Y, Fujii M, Kajita Y, Mizuno M, Wakabayashi T, Fujimoto H (2010) Development of a real-time tactile sensing system for brain tumor diagnosis. Int J CARS 5(4):359–367
Beccani M, Di Natali C, Sliker L, Schoen J, Rentschler M, Valdastri P (2014) Wireless tissue palpation for intraoperative detection of lumps in soft tissue. IEEE Trans Biomed Eng 61(2):353–361
Kaim L, Drewing K (2011) Exploratory strategies in haptic softness discrimination are tuned to achieve high levels of task performance. IEEE Trans Haptics 4(4):242–252
Tanaka Y, Bergmann Tiest WM, Kappers AML, Sano A (2014) Contact force and scanning velocity during active roughness perception. PLOS ONE 9(3):e93363
Tanaka Y, Nagai T, Sakaguchi M, Fujiwara M, Sano A (2013) Tactile sensing system including bidirectionally and enhancement of haptic perception by tactile feedback to distant part. In: Proceedings of the IEEE world haptics conference, pp 145–150
Teramoto K, Watanabe K (2002) Acoustical tactile sensor utilizing multiple reflections for direct curvature measurement. In: Proceedings of the 41st SICE annual conference, vol 1, pp 121–124
Morgan ES, Crosse PAE (1978) The acoustic ranger, a new instrument for tube and pipe inspection. NDT Int 11(4):179–183
Nielsen RO (2009) Acoustic detection of low flying aircraft. In: Proceedings of the IEEE international conference on technologies for homeland security, pp 101–106
Shinoda H, Matsumodo K, Ando S (1997) Acoustic resonant tensor cell for tactile sensing. In: Proceedings of the IEEE international conference on robotics and automation, vol 4, pp 3087–3092
Kandel ER, Schwartz JH, Jessel TM (2000) Principles of neural science, 4th edn. McGraw-Hill, New York
Acknowledgments
This research was funded in part by the JSPS Grant-in-Aid for Scientific Research (B) (No. 25289060).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Tanaka, Y., Fukuda, T., Fujiwara, M. et al. Tactile sensor using acoustic reflection for lump detection in laparoscopic surgery. Int J CARS 10, 183–193 (2015). https://doi.org/10.1007/s11548-014-1067-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-014-1067-z