
Abstract
A technical–economic analysis was conducted on three different technological levels of spraying equipment for specialty crops, based on the results on precision spraying technologies reported in scientific literature. The application scenarios referred to general protection protocols against fungal diseases adopted in vineyards and apple orchards in Central-Southern Europe. The analysis evaluated the total costs of protection treatments (equipment + pesticide costs), comparing the use of conventional air-blast sprayers (referred to as L0), of on–off switching sprayers (L1), and of canopy-optimised distribution sprayers (L2). Pesticide savings from 10 to 35% were associated with equipment L1 and L2, as compared to L0. Within the assumptions made, on grapevines, the conventional sprayer L0 resulted in the most profitable option for vineyard areas smaller than 10 ha; from 10 ha to approximately 100 ha, L1 was the best option, while above 100 ha, the more advanced equipment L2 resulted in the best choice. On apple orchards, L0 was the best option for areas smaller than 17 ha. Above this value, L1 was more profitable, while L2 never proved advantageous. Finally, in a speculation on possible prospectives of precision spraying on specialty crops, the introduction of an autonomous robotic platform able to selectively target the pesticide on diseased areas was hypothesised. The analysis indicated that the purchase price that would make the robotic platform profitable, thanks to the assumed pesticide and labour savings over conventional sprayers, was unrealistically lower than current industrial cost. This study showed that, in current conditions, profitability cannot be the only driver for possible adoption of intelligent robotic platforms for precision spraying on specialty crops, while on–off and canopy-optimised technologies can be profitable over conventional spraying in specific conditions.
Similar content being viewed by others

Introduction
Plant protection products, commonly referred to as pesticides, play a crucial role in securing worldwide food and feed production, especially in high-intensive agricultural areas. On the other hand, pesticide use and misuse represent a major public concern about the impact of agriculture on food products in specific and the environment in general. To address this concern, the reduction of pesticide use is one of the main objectives of the policy actions related to agriculture sustainability. For example, this is the strategic theme of the Framework Directive 2009/128/EC (Anon 2009), which prescribes action plans for reducing the dependence of agriculture on pesticides to the European Union Member States.
This objective can be reached through the implementation of different and complementary approaches, including rotation of crops and selection of resistant varieties, crop management techniques, planning of appropriate scouting practices, introduction of thresholds for triggering protection treatments and application of biocides and beneficial organisms (Epstein and Bassein 2003; Lechenet et al. 2014; Pertot et al. 2017; Walker et al. 2017).
A primary contribution can also come from technological advances in equipment used to carry out the protection treatments. This can play a fundamental role in allowing improved capability of pesticide deposition on the plant, in particular, by enabling the practical implementation of precision spraying, i.e., the possibility of varying the amount of pesticide distribution across the field according to the site-specific characteristics of the crop, in opposition to a uniform application of field treatments.
Literature review on precision spraying equipment
Early emergence of precision spraying was associated with the introduction of automated spot spraying of herbicide for weed control (Felton and McCloy 1992; Paice et al. 1995; Slaughter et al. 1999). These research works led to the development of systems having common traits, that were essentially based on the rapid switching control of single solenoid nozzles or of boom-sections, which enabled the intermittent (spot) spraying of herbicide at full or even partial levels of dose rate. The site-specific control of spraying was based either on infestation maps prepared offline or on real-time optical sensing systems, including machine vision, able to detect weed patches on bare soil or within row crops (Miller 2003). These systems have evolved through further research (Gerhards et al. 2002; Nordmeyer 2006; Christensen et al. 2009; Riar et al. 2011; Berge et al. 2012) which overall reported a wide range (from 5% to almost 90%) of potential savings in herbicide, depending mainly on the spatial and temporal distribution of weeds found in the treated plots.
The concept of precision spraying was also extended to protection treatments directly applied on crop plants. For fungicide applications, in particular, the objective of saving pesticide was pursued by applying variable spray rate adapted to the changing canopy volume or density, instead of the uniform distribution rate adopted in conventional treatments. This approach has been tested on arable crops (Miller et al. 2000; Dammer and Ehlert 2006; Van De Zande et al. 2009; Dammer and Adamek 2012) by means of sensor-controlled spraying equipment, obtaining savings of pesticide reported to be in the range of 5–30%, while keeping an average biological efficacy similar to conventional uniform spraying.
However, it is on specialty crops that this approach has a greater potential of savings, specifically on bush and tree crops where the total amount of pesticides used (per hectare application rates and frequency of the treatments) is typically much higher than for arable crops. Furthermore, in these crops, the volume and density of the canopy largely change during the growing season, and also, gaps in the vegetation or variations in the canopy structure often occur among fields. To address this heterogeneity of spraying targets, the presence, size and density of the canopy in bush and tree crops have been successfully sensed by multiple ultrasonic proximity sensors. The site-specific information obtained was then used to control the on–off switching of the nozzles in correspondence to gaps in the canopy or when entering and exiting from tree crops rows. Examples of equipment adopting such an approach in orchard and vineyard treatments were developed first by Giles et al. (1987), Balsari and Tamagnone (1998), and Moltó et al. (2001). More recently, Esau et al. (2014) developed a similar system for blueberry crops, relying on a colour camera to detect the crop bush canopy to be sprayed selectively. These authors reported average savings from about 10% to more than 35%, compared to conventional sprayers without application control.
Further advances in implementing precision spraying on specialty crops were obtained by using the sensed canopy characteristics not just for the on–off switching of individual nozzles, but also to control the pattern of the spray proportionally to foliage density and according to the canopy geometry (i.e., the plant’s shape). To this aim, Solanelles et al. (2006) developed an air-assisted sprayer for tree crops fitted with a LiDAR sensor for canopy characterisation, and high-frequency pulse width modulation (PWM) solenoid-operated nozzles, which enabled continuous variation of the delivered flow-rate of each single nozzle in order to adapt it to the current spraying target. The pesticide savings obtained were estimated to be from 25 to 45% compared to conventional treatments. Gil et al. (2007) developed a similar system for vineyard applications, equipped with six electro valves, obtaining continuously variable flow rate at three different height portions of the canopy.
In addition to the delivery rate of liquid spray, Balsari et al. (2008) addressed the problem of controlling the air-assist flow rate, with the aim of improving the targeting and deposition of pesticide, i.e., reducing off-target spray losses. Their prototype included adjustable air ports allowing a vertical spray profile with three separate bands on each side, individually controlled according to the characteristics of the canopy volume sensed in real time by ultrasonic sensors. A similar solution, based on PWM-controlled nozzles and a mechanically adjustable air-assist flow, specially designed for the precision spraying of young (i.e., small canopy) citrus trees, has been proposed by Khot et al. (2012) who estimated a possible reduction of pesticide of almost 50%.
Vieri et al. (2013) went further in this approach by developing an orchard–vineyard sprayer able to automatically vary the distribution pattern of the air-assist flow, to adapt it to the canopy volume and shape. This was done by means of electric actuators able to control in real time the inlet air flow rate and the delivering angle of four independent air ports. From the results of preliminary tests, the authors envisaged a possible reduction of about 50% in pesticide while maintaining an acceptable spray deposition. Osterman et al. (2013) addressed the same objective by developing a prototype with three hydraulically driven spraying arms, which enabled obtaining a high reconfigurability (height degrees of freedom) of the spraying and air-assist pattern on a side of the tree row. Also, in this case, the sensed shape of the canopy was processed in real time to vary the position and inclination of the air-assist and spray delivery devices.
A further step in the concept of precision plant protection is represented by the selective targeting of pesticide application only where and when it is needed by the crop. The fundamental rationale of this selective approach relies on the uneven spatial distribution exhibited by the symptoms of several diseases, with typical patch structures evolving around discrete foci, especially during the early stages of an infection’s development (Everhart et al. 2013; Sposito et al. 2008; Waggoner and Aylor 2000). The targeted spraying of disease foci (and of surrounding buffer areas) can control the infection’s establishment and prevent its epidemic spread to the whole field (West et al. 2003) while significantly reducing the total amount of pesticide applied.
The objective of selectively targeting pesticide on diseased areas in specialty crops has recently gained some interest among researchers. Li et al. (2009) considered this concept in a lab setup by using artificial labels to simulate spraying targets to be detected by a stereoscopic colour camera. Larbi et al. (2013), while focussing on the problem of multispectral sensing of the young foliage in citrus canopies, also envisaged future research of the possible selective spraying of immature leaves, being the channel through which Huanglongbing disease infects citrus trees.
Very recently, Oberti et al. (2016) reported the first fully automatic tests of selective spraying of diseased areas in specialty crops by using a reconfigurable, multifunction agricultural robot developed in the EU project CROPS (www.crops-robots.eu). In a series of greenhouse experiments conducted on grapevine plots exhibiting different levels of powdery mildew disease symptoms, the CROPS robotic system was demonstrated to autonomously detect the disease foci within the healthy canopy and to selectively spray them by means of a sprayer end effector. The results of these experiments were evaluated basing on deposition of the spray on targets, with the implicit assumption of a contact action treatment on the disease, obtaining a reduction of applied pesticide of 65–85% (depending on disease levels and spatial distribution of foci) when compared to a conventional homogeneous spraying of the canopy. Despite their preliminary nature, these experiments represent a first demonstration of the possibility of developing such an advanced stage of precision spraying on specialty crops.
Literature review on economic analysis of precision spraying
Economic analysis on the adoption of precision technologies in sprayers has so far been limited to boom equipment for arable crops protection, mostly by studying the savings obtained with spot application of herbicide on weed patches or by avoiding spraying overlaps due to swath errors and irregular shaped or edged fields.
Among the first to study this, Bennett and Pannell (1998) analysed the potential profitability of a weed-activated on–off sprayer to be used for pre-emergence application of glyphosate in a 1000 ha hypothetical wheat farm in Western Australia. The authors estimated the investments and operative costs of the precision spraying equipment and the associated savings of herbicide by assuming different patchy weed populations to be sprayed only above a predefined threshold of weed density. They concluded that, for the considered scenarios, the costs of the technology were still too high for the net benefits to be positive. Timmermann et al. (2003), in a 4-year experiment on site-specific herbicide spraying of arable crops based on manual weed mapping, computed that the obtained herbicide savings were on average 33 € ha−1 year−1, but they did not quantify the associated costs of automatic sensing and patch spraying technologies.
Batte and Ehsani (2006) compared the investment and operative costs of a conventional boom-sprayer with foam-marker guidance used in arable crops, with the costs of a precision sprayer equipped with a high-accuracy RTK-GPS guidance system and individual control of nozzles. The authors analysed the potential benefits of the precision spraying technology by computing the savings according to the difference of swathing accuracy (overlapped spray area) in terms of additional passes (time and fuel costs) and of over-sprayed material. By considering simulated farms composed of fields with different shapes, with or without the presence of waterways, and resulting in a range of farm areas between 248 and 971 ha, they found that, for the smallest farm, a cost of sprayed material above about 60 USD ha−1 per application, keeping all other parameters at values of the base scenario (two treatments per season, 10 years of service life for the equipment), was needed to make profitable the precision spraying technology over conventional sprayers. Alternatively, for the largest farm size considered, breakeven material costs were found to decrease to 15 USD ha−1. With a similar approach, Larson et al. (2016) analysed the profitability of automatic nozzle control for a 27.4-m boom, specifically considering field geometry (i.e., size and shape) obtained for 44 real cotton and corn farm fields in Tennessee, USA. The authors suggested that the perimeter-to-area ratio (P/A) of field geometry may be a useful index to consider when evaluating investments in boom-sprayer precision technologies. They estimated that, for a typical size of cotton farm among those considered, investing in automated boom-control was not profitable for fields with P/A = 0.01, but was generally profitable for fields with P/A ≥ 0.02.
Esau et al. (2016) analysed the economics of precision spraying technologies on boom-sprayers used for wild blueberry farming. The authors compared the cases of a 13.7-m tractor-mounted boom sprayer equipped with conventional manual control and foam marker guidance assistance, with one equipped with a high-accuracy guidance system and individual nozzle control actuated by vegetation sensing. By considering two simulated fields with 30% weed coverage during pre-emergence herbicide applications, and with 80% crop coverage during fungicide applications, based on 9 spray passes over the 2-year production cycle, the authors computed an average reduction of 44% on operative costs (from 2110 CAD ha−1 to 1137 CAD ha−1) thanks to avoiding over-spraying due to swath errors (assumed to be 9% on average), and to the savings obtained by spot application.
Prior technical–economic analyses have not addressed precision technologies for spraying equipment used on specialty crops, i.e., air-assisted sprayers travelling along crops’ rows (trees, vines, bushes) and applying pesticide onto a vertical canopy wall. However, from the research works mentioned above, the conclusion can be drawn that the major factors influencing the profitability of introducing precision technologies on sprayer equipment are, in general, the investment costs of the technology, the amount and value of the inputs saved per unit of area, the spatial variability of the inputs needed by the crop, and the size of the farm area operated on by the equipment.
Objectives of the study
Starting from the results obtained in research of precision spraying on specialty crops, in this study, a technical–economic analysis on three different technological levels of precision spraying equipment, associated with increasing levels of reduction of the distributed amount of pesticide, was conducted. The reduction of distributed pesticide was assumed to be linked to the improved accuracy in targeting the application without affecting the biological efficacy of the treatment, hence generating a potential cost–benefit for the farmer.
Gaining insights into evaluating this benefit is of primary interest since the profitability of precision spraying technologies will be a major driver for their adoption in the case of specialty crops. Therefore, this study aimed to, (a) assess the total costs associated with spraying equipment at the different technological levels considered and, (b) evaluate whether more advanced equipment can be more profitable compared to current conventional sprayers.
Furthermore, this analysis was extended to a high-precision, robotic spraying platform, here considered as a prospective scenario for precision spraying technologies. For this specific case, the study aimed to, (c) assess the maximum allowed cost for such a robotic platform which would generate positive net benefits for the farmer, thanks to the envisaged pesticide reduction.
Analysed scenarios and methodology
Crops and protection protocols
In this work, two among the most diffused specialty crops were considered as case studies: grapevine (Vitis vinifera L.) and apple (Malus domestica Borkh.). To define a rather general example of protection protocol of these specific crops, the analysis was focused on the most relevant and frequent fungal diseases found in the intensive production areas of Central-Southern Europe, relying on the typical crop protection strategy generally adopted in these areas (Anon 2014, 2016a, b; Bohren et al. 2016a, b). To conduct the technical–economic analysis, it was necessary to preliminarily define the main crop management and protection parameters adopted, namely the number of treatments per season, the time available to carry out the treatments, the active ingredients (AIs) used and their unitary costs, the application rates and the tree rows distance in the orchards or vineyards.
The quantification of the number of treatments executed in one production cycle, the costs and the application rate of the most diffused pesticides, and the machine field speed were determined based on the best practices adopted in this region.
Grapevine scenario
Under the considered pedoclimatic conditions, the most diffused and significant diseases in grapevines are due to the pathogenic fungi Botrytis cinerea Pers. (grey mold), Plasmopara viticola (Berk. & M.A. Curtis) Berl. & de Toni (downy mildew), and Erysiphe necator Schwein (powdery mildew) (Brewer and Milgroom 2010; Williamson et al. 2007). Usually the protection against the last two pathogens is applied within the same treatment, and it requires on average 10–15 repeated fungicide applications per season. On the other hand, B. cinerea typically requires 1–3 specific fungicide treatments per season.
Within the protection calendar, the required timeliness when repeating the treatment depends on the specific disease and local conditions. In the analysis, a conservative time window of 2 days was assumed for conducting a single treatment of the whole vineyard.
The AIs of fungicides commonly used for grapevine protection from downy and powdery mildew are fosetyl aluminium, dithiocarbamate, cyazofamid, sulfur, penconazol and a few others; while, for grey mold, pyrimethanil, boscalid, fluopyram and a few other specialised AIs are used (Anon, 2014, 2016a, b; Bohren et al. 2016a).
The cost range for different fungicides varies with the disease. An average cost of 10–35 € kg−1 and of 25–50 € kg−1 is typical for powdery mildew and downy mildew AIs, respectively. In comparison, the cost of the AIs for grey mold are higher, ranging from about 80 to 120 € kg−1.
Some variability can also be found in fungicide application rates: for downy mildew and powdery mildew, AI application rates (AIar) of 3.5–7 kg ha−1 and from 1 to 3.5 kg ha−1, respectively, are common. For grey mold, the adopted application rates range from 0.8 to 2 kg ha−1 and, as a particular feature, it must be noted that for treatments against grey mold, the spraying equipment is set to only cover a limited band of the canopy, with a height of 0.5–0.7 m, corresponding to the so-called “cluster belt” where the grape bunches grow.
Based on this general protection framework, the canopy architecture was referred to spur cordon, a common training system adopted for new vineyards, with average inter-row and intra-row distance of 2.3 and 1.7 m, respectively. In overall, the parameters detailed in Table 1 were assumed as representative for the grapevine protection scenario. The fungicide treatments against powdery and downy mildew are referred to as the TRG1 treatment group, while those against grey mold are separately referred as the TRG2 treatment group, due to their specific characteristics.
Apple scenario
Under the considered pedoclimatic conditions, the most diffused and significant diseases in apple crop are apple scab and powdery mildew, due to the pathogenic fungi Venturia inaequalis Cooke (Wint.) and Podosphaera leucotricha (Ellis & Everh.) E.S. Salmon, respectively (Williams and Kuc 1969). Usually the protection against the two pathogens is applied within the same treatment. The number of applications is largely dependent on local weather conditions and can range from 15 to 32 fungicide treatments per season.
Similar to the grapevine case, regarding the treatments’ timeliness, a conservative time window of 2 days was assumed for conducting a single treatment of the whole apple orchard.
The AIs of fungicides typically used to protect apple orchards from apple scab and powdery mildew vary from the traditional and relatively inexpensive copper oxychloride to high-priced cyprodinil, including bupirimate, dithianon and pyrimethanil. For these AIs, the average cost varies in the range of 20–50 € kg−1, and the adopted application rates range from 1 to 5 kg ha−1 per treatment (Anon 2014, 2016a; Bohren et al. 2016b).
Based on this general protection framework, the canopy architecture was referred to tall spindle training system, commonly adopted in apple orchards, with average inter-row and intra-row distance of 3 and 1 m, respectively. In overall, the parameters detailed in Table 1 were assumed as representative for the apple protection scenario. All the fungicide treatments on apple trees are referred to as the TRA treatment group.
Spraying equipment at different technological levels
Technological characteristics of the spraying equipment
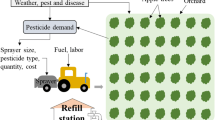
In this analysis, three different typologies of spraying equipment were considered, hereafter referred to as L0, L1 and L2 (Fig. 1). These types of machines are characterised by the adoption of different technological levels which enable an increasing capability of adapting the application rate and the spraying pattern to the site-specific canopy characteristics.

Schematic representation of the three typologies of spraying equipment at increasing technological levels L0–L2
As a consequence, the equipment at three technological levels, L0, L1 and L2, was assumed to allow the use of a different amount of pesticide (i.e., to obtain different pesticide savings) without any negative effect of protection efficacy of the fungicide treatments.
The main characteristics of the different technological levels in spraying equipment are described in the following:
-
L0 refers to the conventional air-blast sprayer coupled to a tractor, i.e., the state-of-the-art equipment used for protection treatments in vineyards and orchards. In the analysis, L0 represents the reference equipment against which the costs and benefits of more advanced technologies are evaluated. With this technology, crop spraying is conducted at a constant flow rate which, in turn, corresponds to a homogeneous application rate, provided that the travel speed is kept constant during the treatment. In this case, the closeness between the desired and applied amount highly relies upon (1) the calibration of the liquid spray pattern, (2) the calibration of the air-flow carrier pattern, and (3) the homogeneity of the canopy shape and volume across the orchard/vineyard plots. In a real field situation, these factors can cause areas which are over-applied (lower canopy volume or decreased travel speed) and under-applied (higher canopy volume or increased travel speed) (Gil et al. 2013).
-
L1 refers to an on–off automatically switching sprayer, i.e., an air-blast sprayer equipped with (1) a sensing system (e.g., ultrasonic sensors) able to detect the canopy presence in the sprayed area, (2) a control system which can correspondingly switch on or off each single nozzle in real time during the treatment and, (3) a flow-control system able to deliver a flow proportional to the sprayer’s speed. Equipment L1 is therefore assumed to allow compensation for the variations in travel speed and, moreover, to be capable of distributing pesticide only when the canopy is present. With this equipment, some or all of the nozzles are switched off when vegetation is not present (e.g., canopy gaps, heterogeneity in plant size, row turnings, etc.). Examples of sprayers adopting this technology are those described by Balsari and Tamagnone (1998), Moltó et al. (2001), and Esau et al. (2014), who reported savings in pesticide application from about 10% to more than 35%, compared to conventional sprayers L0.
-
L2 refers to an automatically canopy-optimised distribution sprayer, i.e., an air-blast sprayer equipped with (1) a 3D sensing system (e.g., based on LiDAR or time of flight cameras) able to detect the shape and volume of the sprayed canopy, (2) a control system which correspondingly varies the flow rate of single nozzles proportionally to the foliage density and canopy shape, and (3) actuators that adjust in real time the nozzles and air deflectors’ geometry in order to adapt the air-carried spraying pattern to the vegetation geometry. Examples of similar equipment are the prototypes described by Solanelles et al. (2006), Gil et al. (2007), Balsari et al. (2008), Khot et al. (2012) and Vieri et al. (2013). The average reported savings in pesticide application compared to conventional sprayer L0 are in the range of 25–45%.
Based on the results reported in the above-cited scientific literature, in this study it was assumed that equipment at technological levels L1 and L2 enables pesticide savings, compared to L0, as indicated in Table 2. These savings are related to grapevine and apple crop treatments and imply no reductions of the protection efficacy when compared to conventional homogeneous treatments.
Operative performance of spraying equipment
The main parameter to evaluate the operative performance of the considered equipment is the field capacity Ca:
where Ca is the effective field capacity (ha h−1), s is field speed (km h−1, assumed to be 6 km h−1 for all the equipment), w is the sprayer working width (m, i.e., the inter-row distance), and Ef is field efficiency, decimal.
Ef accounts for the incidence of idle time during working time. For spraying operation, idle time is mainly due to turnings and to tank refills. The ASABE Standard D497.6 (2015a) indicates for conventional air-carrier sprayers an average field efficiency of 0.6, implying that the total idle time is 40% of spraying time. Consistently to this and relying on field experience in vineyard and orchard spraying, a constant incidence of turning time equal to 15% of spraying time was assumed. On the other hand, the incidence of refills decreases for L1 and L2 equipment compared to L0, thanks to the spray savings obtained. In detail, filling time was assumed at 25% of spraying time for L0, while for equipment L1 and L2, it was reduced according to savings (Table 2). This leads to the following general expression for the field efficiency Ef to be used in Eq. (1):
where tt is the turning time incidence, decimal (in this case 0.15), tf is the filling time incidence for L0, decimal (in this case 0.25), and S is the pesticide savings corresponding to the specific technological level (decimal, Table 2).
Considering now an orchard/vineyard area A (ha) and assuming an average time available for field work each day (G) at 11 h day−1, it follows that the number of sprayer–tractor units (Nu) necessary to complete one treatment (tr) in the available time ta (day tr−1), is:
where ceil indicates the ceiling function, i.e., the round up to next integer function, A is orchard/vineyard area (ha), ta is the time window to execute one treatment on the whole area (day tr−1, in this case 2 day tr−1), and G is the time available for field work each day (h day−1, in this case 11 h day−1).
In summary, the main technical parameters of the equipment at the three different technological levels are reported in Table 3.
Economic analysis of spraying equipment
In order to evaluate the possible profitability of precision spraying technologies (i.e., L1 and L2) over conventional equipment (L0) in vineyard and apple orchard protection, the total costs associated with the use of each typology of equipment were computed by adding up ownership, operating and pesticide costs. The economic analysis was applied to hypothetical vineyard/orchard farms with a crop area A varying from 5 to 200 ha.
Spraying equipment costs
The spraying equipment costs were evaluated by applying the methodology defined in the ASABE Standard EP496.3 (2015b). This is a reference method for accounting agricultural machinery costs by evaluating their annual ownership costs (aOFC, € year−1, i.e., equipment depreciation, interests on the investment, taxes, housing, and insurance) and their operating costs (OC, € h−1, i.e., labour, fuel and lubricants, repair and maintenance).
Table 4 lists the economic parameters used for applying the ASABE EP496.3 methodology to a number of sprayer–tractor units Nu defined by Eq. (3). From the average market price of commercial machinery, the purchase prices of the tractor (50 000 €) and of the conventional air-blast sprayer (12 000 €), i.e., L0 equipment, were estimated. For the sprayers at technological levels L1 and L2, an additional cost due to the precision technologies of 12 000 € and of 28 000 €, was respectively estimated. The cost analysis referred to equipment units consisting of a sprayer and tractor, i.e., by assuming that the coupled tractor is permanently dedicated to protection treatments, as is typically done in real practice, and hence its ownership costs are fully included in the analysis. Fuel and oil consumption were computed by considering an average tractor’s engine load of 65%.
In order to compute the operating costs of the equipment, the annual work time (aWt, h year−1) was obtained according to the following:
where ntr is the number of annual treatments associated to the adopted protection protocol (Table 1).
Pesticide costs
The total annual costs of pesticide (aPC, € year−1) were evaluated based on the unitary costs, number of treatments and the application rates. Considering the pesticide savings (S, decimal) associated with precision technologies on equipment L1 and L2, the total annual costs of sprayed pesticide were:
where AIar is the active ingredient application rate with L0 equipment (kg ha−1), S is the pesticide savings compared to L0 equipment (decimal), and AIp is the active ingredient unitary price (€ kg−1).
Total costs of protection treatments
The annual total costs per hectare (aTCA, € year−1 ha−1) of protection treatments conducted by means of the three typologies of equipment were computed by adding ownership, operating and pesticide costs and dividing by the vineyard/orchard area A:
where aOFC are the annual ownership costs of the equipment (€ year−1), aWt is the annual work time (h year−1) and OC is the operating costs of the equipment (€ h−1).
Advanced robotic level as perspective scenario
In a speculation about perspective developments of crop protection equipment, the introduction of an advanced robotic platform (hereafter referred to as equipment of technological level L3) was hypothesised, and assumed able to carry out autonomous protection treatments (i.e., without an operator) and to target the spraying of pesticide only where needed by the crop, namely on disease foci and on buffer canopy regions around the infected areas.
The robotic platform L3 is assumed to be equipped with a disease detection system (e.g., based on multispectral or hyperspectral sensors) and an onboard intelligent classifier, possibly connected to a remote assisting information system. The robot’s actuators are assumed to perform localised spraying onto the identified targets and a modulated application on buffer areas, according to the severity of the symptoms and the risks of the infection spreading.
A possible example of such an advanced approach was explored with the CROPS robotic platform (www.crops-robots.eu). Starting from the experimental results by Oberti et al. (2016), even if very partial, in the analysis it was hypothesised that the robotic technology can enable pesticide saving of 80%, as compared to the reference scenario L0. Also, in this case, the savings are assumed to be obtained without negatively affecting the protection capability of the selective treatments.
Inherently in this selective approach, it is a fact that not all the crop area will be covered by periodical treatments conducted on a regular basis. Therefore, to guarantee effective crop protection, the robotic platform must be able to monitor every point of the vineyard/orchard within a safe time interval, so that when infection foci emerge, they can be selectively treated at a conveniently early stage of development. In the analysis, the robot revisit time tr, i.e., the time interval needed by the robot for a complete monitoring of the whole crop area, was set to 3 days. This value was used in Eq. (3) to compute the number of robotic platforms, Nu, needed to manage a given crop area, A, as previously derived from Eqs. (1) to (3).
Moreover, in consideration of the needed capability of operating at high spatial resolution, an average field speed of 1.2 km h−1, was considered for the robot and this value was used in Eq. (1) to compute its field capacity. Finally, due to the fully autonomous operation capability of technological level L3, the robotic platform is assumed to work on average for 20 h day−1 [G value in Eq. (3)], on a continuous basis during a total annual crop protection period (aCPP, day year−1) of 130 days per year. Therefore, in this case, the aWt (h year−1), needed to determine the operating costs, was computed by Eq. (4) modified as follows:
where aCPP is the total annual crop protection period (day year−1, in our case 130 days year−1).
Table 5 summarises the technical–economic parameters assumed for the analysis of the robotic platform, which was specifically aimed at defining the unknown hypothetical purchase price that would make the robot (L3) profitable over conventional (L0) or technologically advanced (L1, L2) spraying equipment as are summarised in Table 5.
For the robotic platform to be profitable over the other spraying technologies, its annual total costs per hectare, aTCAL3, must be lower than those obtained for the sprayers at levels L0–L2. Therefore, the condition to make L3 technology profitable is:
where pL3 is the purchase price of the robotic platform (L3, € unit−1).
Since the purchase price directly impacts on both ownership costs, aOFC, and operating costs (through maintenance costs, which are a function of equipment price), OC, it follows that the condition of Eq. (8) can be satisfied even by a high robot price, pL3, provided that the resulting increase in aOFC and OC are balanced by enough savings in pesticides costs, aPC, and in labour and fuel components of OC, when compared to spraying equipment L0–L2.
For the range of vineyard/orchard crops area (5–200 ha), the annual pesticide costs and the operating costs of L3 were computed by using the parameters in Table 5. Finally, the purchase price for the robotic platform to be profitable over other spraying equipment was numerically computed by determining the maximum value of pL3 (hence, the maximum ownership and maintenance costs) which fulfilled the condition of Eq. (8).
Sensitivity analysis
A sensitivity analysis was conducted in order to estimate how the uncertainty on the parameters could affect the output of the technical–economic analysis of spraying equipment at different technological levels L0–L2.
To this aim, the sensitivity analysis was evaluated by including the parameters shown in Table 6 with the corresponding range of variation considered.
The results were computed only for a crop area of 30 ha (a representative economic average-sized farm for grape and fruit specialised growing in EU area; Eurostat 2016) and were quantified in terms of the change in total cost (%), as compared to those obtained with parameters specified in Tables 1, 2, 3 and 4.
Results and discussion
Comparison among different technological levels
Grapevine
Equipment costs
Figure 2 (top) shows the annual equipment costs per hectare computed for the different technological levels in the vineyard scenario. Each curve exhibits the expected hyperbolic trend for increasing vineyard area. For areas smaller than 15 ha, the equipment costs vary dramatically with vineyard size, while above this threshold the cost is less dependent on the area.

Grapevine case: per hectare annual equipment costs (top) and total annual costs of protection treatments (bottom), as a function of crop area for the three technological levels
Sharp cost edges appear in correspondence with the area requiring an additional tractor–sprayer unit to execute the treatment in the available time ta. For all three levels, the first edge (from one to two tractor–sprayer units) occurs at about 22 ha. For larger areas, the transition edges tend to slightly shift among technological levels. This is due to the higher field efficiency of L1 and L2 equipment, thanks to lower filling time than L0, obtained by corresponding savings in spraying.
As a comparative index among levels, the equipment cost for a reference vineyard farm of 30 ha was shown to increase with the technological level: namely it was 944 € ha−1 year−1 for L0, 1100 € ha−1 year−1 for L1, and 1316 € ha−1 year−1 for L2.
Total costs of protection treatments
The annual cost of pesticide per hectare was obviously found to be independent from the vineyard area: for L0, the total pesticide costs were 1350 € ha−1 year−1, for L1 1098 € ha−1 year−1, and for L2, 905 € ha−1 year−1.
Figure 2 (bottom) shows the total annual cost of protection treatments in vineyards, conducted with the equipment at different technological levels. The plotted curves show that for a worked area smaller than 10 ha, L0 is the most profitable option among the equipment considered, with relative cost savings of about 1–5% compared to L1 and of about 3–18% compared to L2.
For areas larger than 10 ha, L1 becomes more profitable than L0, with cost savings of 5% compared to L0. It must be noted that this advantage pattern strongly changes around the curve edges, i.e., the transition area corresponding to the introduction of an additional tractor–sprayer unit.
Interestingly, the more advanced and expensive equipment L2 becomes the best option for vineyards with an area larger than approx. 100 ha.
Sensitivity analysis
The main results of the sensitivity analysis for the vineyard scenario are summarised in Fig. 3 (top). It shows the change (in percent) of total costs due to the variation of a single input parameter, keeping constant all the others. The data show that changes in the economic parameters (tractor and equipment purchase price, sprayer service life) resulted in a limited impact (less than ± 5%) on the total costs for all three technological levels, L0–L2.

Sensitivity analysis: changes of the total annual costs for grapevine (top) and apple cases (bottom) as determined by the variation range of the variables
On the contrary, the field speed (which is not inherent to the precision spraying technologies considered in this study) appears to have the largest impact in the sensitivity analysis for all technological levels. This is due, on one hand, to the obvious changes in operational costs linked to variations in work time. Additionally, a major effect on costs is also associated with the number of tractor–sprayer units needed to cover the crop area, which is directly related to the machine work rate.
As expected, the main protection protocol parameters (Table 6) had an evident influence on the computed final costs. On average, the variation of AIs price, application rate and number of treatments influenced the total cost from about − 20 to + 15% [Fig. 3 (top)].
Apple
Equipment costs
Figure 4 (top) shows the annual equipment costs per hectare computed for the different technological levels in the apple orchard scenario. The hyperbolic trend in costs curve is confirmed as the orchard area increases. For areas smaller than 15 ha, the equipment costs vary dramatically with orchard size, while above this threshold, the costs are less dependent on the area. Again, sharp cost edges appear in correspondence with the transition area where introduction of an additional tractor–sprayer unit is needed to execute the treatment in the available time ta. For all three levels, the first transition from one to two tractor–sprayer units occurs at about 30 ha while, for larger areas, the transition edges slightly shift among technological levels, thanks to the higher field efficiency of more advanced levels L1 and L2.

Apple case: per hectare annual equipment costs (top) and per hectare annual total costs of protection treatments (bottom), as a function of crop area for the three technological levels
As a comparative index among levels, the equipment cost for a reference orchard farm of 30 ha was shown to increase with the technological level: namely for L0, the cost was 1107 € ha−1 year−1, for L1, 1279 € ha−1 year−1, and for L2, 1518 € ha−1 year−1.
Total costs of protection treatments
The annual costs of pesticide per hectare used in apple orchard protection were shown to be 1200 € ha−1 year−1 for L0, 960 € ha−1 year−1 for L1 and 780 € ha−1 year−1 for L2.
Figure 4 (bottom) shows the total annual cost of protection treatments in apple orchards, conducted with the equipment at different technological levels. The curves show that in this case, L0 is the most profitable option for an area smaller than 17 ha. The relative cost savings range from about 1 to 7% compared to L1, and in an area below 14 ha range from about 2 to 20% compared to L2.
For areas larger than 17 ha, L1 becomes more profitable than equipment L0 and L2, with relative cost savings limited to less than 1.5% when compared to L0 and from 2 to 4% when compared to L2.
Differently from the vineyard case, in this scenario, the equipment L2 never resulted in the most profitable option compared to L1, likely due to the lower total costs of pesticide used in apple protection protocol.
It must be noted that this general pattern of relative cost advantage among equipment levels is distorted in correspondence with transition edges in the curve.
Sensitivity analysis
The sensitivity analysis for the apple orchard scenario [Fig. 3 (bottom)] led to similar results as those obtained for the vineyard scenario. Changes in purchase costs of the tractor and sprayer and service life of the sprayer were shown to have a limited impact (less than approx. ± 5%) on the total costs for all three technological levels, L0–L2. For the same reasons mentioned for the vineyard scenario, also in this case, the field speed had the largest impact for all technological levels. Changes in pesticide costs and in application rate resulted in corresponding variations of total costs of approximately − 15 to + 15%. On the other hand, the large number of annual treatments has an evident influence on total costs (from − 30% to more than + 20%) because it involves a proportional use of machines, therefore impacting the equipment costs.
Advanced robotic level
The analysis allowed computation of the savings on pesticide costs corresponding to the reduction in pesticide use assumed to be enabled by the robotic platform L3, as well as the savings in labour costs and, to a lesser extent, in fuel costs compared to spraying equipment L0–L2.
By applying Eq. (8), the maximum purchase cost that would ensure the profitability of the robot technology over the spraying equipment at lower technological levels L0–L2, was found. Regardless of the area of the vineyard/orchard considered, for the grapevine scenario, this purchase cost was 54 700 €, while for apple scenario it was 66 500 €.
These price thresholds obtained from the analysis for L3 appear to be far from any sustainable industrial cost, making a profitable application of such a robotic platform in precision spraying quite unrealistic, given the current conditions.
Indeed, at the current technology costs, the computed profitability of L3 in relation to lower spraying technologies was not reached even by further increasing the hypothesised savings in pesticide or by assuming extreme values for the robot service life and field speed. For example, for a representative farm area of 30 ha even assuming that the robot would give savings of 95% of pesticide use compared to L0, the maximum purchase cost defined by Eq. (8) was 84 300 € for vineyard, and 93 600 € for apple orchard. Similarly, considering a robot’s service life of 12 000 h, the price was 80 800 € and 88 100 € for vineyard and orchard, respectively. On the other hand, by assuming an extreme working speed for the robot of 5 km h−1, the price was 238 800 € and 286 600 € for vineyard and orchard, respectively. The results obtained within the assumptions made in this study highlight that cost profit cannot be the only driver for possible adoption, in the very near future, of autonomous intelligent platforms for advanced precision spraying on speciality crops, unless sensing and spraying actuation cycle-time will be reduced to such a level to enable the working speed of the robot to be comparable to conventional spraying equipment.
Conclusions
A technical–economic analysis was conducted on three different technological levels of spraying equipment for specialty crops (grapevine and apple), which were assumed to enable correspondingly increasing levels of reduction in distributed pesticide, without negatively affecting the biological efficacy. Fungicide treatments against major fungal diseases in vineyards and apple orchards were considered and the annual total costs of protection treatments (costs of equipment and pesticide) were evaluated when operating with a conventional air-blast sprayer (referred to as technological level L0), with an on–off nozzle switching sprayer (L1) and with a canopy-optimised distribution sprayer (L2).
Within the assumptions made, the results of the analysis highlighted that:
-
for a given worked area, the equipment cost increased with technological level, as expected; the values obtained for a reference vineyard/orchard farm of 30 ha rose from 944 € ha−1 year−1 for L0 to 1316 € ha−1 year−1 for L2 in the grapevine case, and from 1107 € ha−1 year−1 for L0 to 1518 € ha−1 year−1 L2 in the apple case;
-
thanks to pesticide savings enabled by the different levels of precision spraying technologies, the annual cost of pesticide per hectare decreased from 1350 € ha−1 year−1 for L0 to 905 € ha−1 year−1 for L2 in the grapevine case, and from 1200 € ha−1 year−1 for L0 to 780 € ha−1 year−1 for L2 in the apple case;
-
in terms of the annual total costs of protection treatments, in the grapevine case, the conventional sprayer L0 resulted in the most profitable option for a vineyard area smaller than 10 ha; from 10 ha to approx. 100 ha, L1 was the best option, while above 100 ha, the more advanced equipment L2 was shown to be the best choice;
-
in the apple case, the lowest total costs of protection treatments for an orchard area smaller than 17 ha were obtained with L0; above 17 ha, L1 was the best option, while L2 never proved to be profitable compared to L0 and L1;
-
for both the grapevine and apple cases, the sensitivity analysis showed evidence that the uncertainty on equipment economic parameters had a limited impact on the total costs of protection; on the contrary, the uncertainty on protection parameters had an evident influence on the computed final costs: on average, the range of variation of AIs price, application rate and number of treatments influenced the total cost by about − 20 to + 15% and by about − 30 to + 20%, in the grapevine and apple case, respectively;
-
the variation of sprayer field speed, which is not inherent to the precision spraying technologies considered in this study, appears to have the largest cost impact in the sensitivity analysis for all technological levels.
Finally, in a speculation on possible perspectives of precision spraying on specialty crops, the analysis addressed the case of an autonomous robotic platform able to selectively target the pesticide on diseased areas. The results obtained indicated that:
-
the purchase price that would make the robotic platform profitable, thanks to the assumed pesticide and labour savings over sprayers at technological levels L0–L2, was unrealistically lower than current industrial cost;
-
regardless of the area of the vineyard/orchard considered, for the grapevine scenario, the robot purchase cost threshold was found to be around 54 700 €, while for the apple scenario, it was 66 500 €;
-
cost profit cannot be the only driver for the possible adoption, in the very near future, of autonomous intelligent platforms for robotic precision spraying on speciality crops, unless the working cycle-time is reduced to such a level to enable robot speed comparable to conventional spraying equipment.
Abbreviations
- A:
-
Crop area (ha)
- aCPP:
-
Total annual crop protection period (day year−1)
- AI:
-
Active ingredient
- AIar :
-
Active ingredient application rate (kg ha−1)
- AIp :
-
Active ingredient unitary price (€ kg−1)
- aOFC:
-
Annual ownership costs of the equipment (€ year−1)
- aPC:
-
Annual costs of pesticide (€ year−1)
- aTCA:
-
Annual total costs per hectare of protection treatments (€ year−1 ha−1)
- aWt:
-
Annual work time (h year−1)
- Ca :
-
Effective field capacity (ha h−1)
- CAD:
-
Canadian dollars (currency value)
- €:
-
Euros (currency value)
- Ef :
-
Field efficiency (decimal)
- G:
-
Time available for field work each day (h day−1)
- L:
-
Technological level of the spraying equipment
- ntr :
-
Number of annual treatments (tr year−1)
- Nu :
-
Number of tractor–sprayer equipment units (–)
- OC:
-
Operating costs of the equipment (€ h−1)
- s:
-
Field speed (km h−1)
- S:
-
Pesticide savings for a specific technological level (decimal)
- ta :
-
Available time to execute one treatment on the whole area (day tr−1)
- tf :
-
Filling time incidence on work time (decimal)
- tr :
-
Revisit time between two consecutive treatments (days)
- tr:
-
Single protection treatment
- TRA:
-
Treatment group for apple
- TRG:
-
Treatment group for grapevine
- tt :
-
Turning time incidence on work time (decimal)
- USD:
-
United States dollars (currency value)
- w:
-
Sprayer working width (m)
References
Anon. (2009). Directive 2009/128/EC of the European Parliament establishing a framework for community action to achieve sustainable use of pesticides. Official Journal of the European Union, L309, 71–86.
Anon. (2014). Vineyard and orchard protection (in Italian, la difesa in vigneto e frutteto). Informatore Agrario, 2014(11), Suppl. I.
Anon. (2016a). Tree crops of south-west France (in French, le guide arbo du sud-ouest). L’action agricole, 106(11), Suppl. I.
Anon. (2016b). Vineyard protection (in Italian, difesa della vite). Informatore Agrario, 2016(10), Suppl. I.
ASABE Standards. (2015a). D497.6: Agricultural machinery management data (62nd ed.). St. Joseph, MI, USA: American Society of Agricultural and Biological Engineers.
ASABE Standards. (2015b). EP496.3: Agricultural machinery management (62nd ed.). St. Joseph, MI, USA: American Society of Agricultural and Biological Engineers.
Balsari, P., Doruchowski, G., Marucco, P., Tamagnone, M., Van De Zande, J., & Wenneker, M. (2008). A system for adjusting the spray application to the target characteristics. Agricultural Engineering International, CIGR Journal, 10, 1–11.
Balsari, P., & Tamagnone, M. (1998). An ultrasonic airblast sprayer. In Proceedings of EurAgEng international conference of agricultural engineering (pp. 585–586). EurAgEng 1998, Oslo, Norway
Batte, M., & Ehsani, M. (2006). The economics of precision guidance with auto-boom control for farmer-owned agricultural sprayers. Computers and Electronics in Agriculture, 53, 28–44.
Bennett, A. L., & Pannell, D. J. (1998). Economic evaluation of a weed-activated sprayer for herbicide application to patchy weed populations. Australian Journal of Agricultural and Resource Economics, 42, 389–408.
Berge, T., Goldberg, S., Kaspersen, K., & Netland, J. (2012). Towards machine vision based site-specific weed management in cereals. Computers and Electronics in Agriculture, 81, 79–86.
Bohren, C., Dubuis, P., Kuske, S., Kuster, T., Linder, C., & Christen, D. (2016a). Orchard protection products 2016 (in French, index phytosanitaire pour l’arboriculture 2016). Revue Suisse de Viticulture Arboriculture Horticulture, 48(1), Suppl. II.
Bohren, C., Dubuis, P., Kuske, S., Linder, C., & Naef, A. (2016b). Vineyard protection products 2016 (in French, index phytosanitaire pour la viticulture 2016). Revue Suisse de Viticulture Arboriculture Horticulture, 48(1), Suppl. I.
Brewer, M. T., & Milgroom, M. G. (2010). Phylogeography and population structure of the grape powdery mildew fungus, Erysiphe necator, from diverse Vitis species. BMC Evolutionary Biology, 10, 268.
Christensen, S., Søgaard, H. T., Kudsk, P., Nørrmark, M., Lund, I., Nadimi, E. S., et al. (2009). Site-specific weed control technologies. Weed Research, 49, 233–241.
Dammer, K. H., & Adamek, R. (2012). Sensor-based insecticide spraying to control cereal aphids and preserve lady beetles. Agronomy Journal, 104, 1694.
Dammer, K. H., & Ehlert, D. (2006). Variable-rate fungicide spraying in cereals using a plant cover sensor. Precision Agriculture, 7, 137–148.
Epstein, L., & Bassein, S. (2003). Patterns of pesticide use in California and the implications for strategies for reduction of pesticides. Annual Review of Phytopathology, 41, 351–375.
Esau, T., Zaman, Q., Chang, Y., Schumann, A., Percival, D., & Farooque, A. (2014). Spot-application of fungicide for wild blueberry using an automated prototype variable rate sprayer. Precision Agriculture, 15, 147–161.
Esau, T., Zaman, Q., Groulx, D., Corscadden, K., Chang, Y., Schumann, A., et al. (2016). Economic analysis for smart sprayer application in wild blueberry fields. Precision Agriculture, 17, 753–765.
Eurostat. (2016). Agriculture, forestry and fishery statistics. Luxembourg: Publications Office of the European Union. doi:10.2785/917017.
Everhart, S. E., Askew, A., Seymour, L., & Scherm, H. (2013). Spatio-temporal patterns of pre-harvest brown rot epidemics within individual peach tree canopies. European Journal of Plant Pathology, 135, 499–508.
Felton, W., & McCloy, K. (1992). Spot spraying. Agricultural Engineering (Nov.), 9–12.
Gerhards, R., Sökefeld, M., Timmermann, C., Kühbauch, W., & Williams, M. M. (2002). Site-specific weed control in maize, sugar beet, winter wheat, and winter barley. Precision Agriculture, 3, 25–35.
Gil, E., Escolà, A., Rosell, J., Planas, S., & Val, L. (2007). Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Protection, 26, 1287–1297.
Gil, E., Llorens, J., Llop, J., Fàbregas, X., Escolà, A., & Rosell-Polo, J. (2013). Variable rate sprayer. Part 2. Vineyard prototype: Design, implementation, and validation. Computers and Electronics in Agriculture, 95, 136–150.
Giles, D. K., Delwiche, M., & Dodd, R. (1987). Control of orchard spraying based on electronic sensing of spray target characteristics. Transactions of the ASABE, 30, 1624–1630.
Khot, L. R., Ehsani, R., Albrigo, G., Larbi, P. A., Landers, A., Campoy, J., et al. (2012). Air-assisted sprayer adapted for precision horticulture: Spray patterns and deposition assessments in small-sized citrus canopies. Biosystems Engineering, 113, 76–85.
Larbi, P. A., Ehsani, R., Salyani, M., Maja, J. M., Mishra, A., & Neto, J. C. (2013). Multispectral-based leaf detection system for spot sprayer application to control citrus psyllids. Biosystems Engineering, 116, 509–517.
Larson, J. A., Velandia, M. M., Buschermohle, M. J., & Westlund, S. M. (2016). Effect of field geometry on profitability of automatic section control for chemical application equipment. Precision Agriculture, 17, 18–35.
Lechenet, M., Bretagnolle, V., Bockstaller, C., Boissinot, F., Petit, M. S., Petit, S., et al. (2014). Reconciling pesticide reduction with economic and environmental sustainability in arable farming. PLoS ONE. doi:10.1371/journal.pone.0097922.
Li, Y., Xia, C., & Lee, J. (2009). Vision-based pest detection and automatic spray of greenhouse plant. In 2009 IEEE international symposium on industrial electronics (pp. 920–925). doi:10.1109/ISIE.2009.5218251.
Miller, P. (2003). Patch spraying: future role of electronics in limiting pesticide use. Pest Management Science, 59, 566–574.
Miller, P., Lane, A., Wheeler, H. (2000). Matching the application of fungicides to crop canopy characteristics. In The BCPC 2000 conference: Pests and diseases (Vol. 2, pp. 629–636). Brighton, UK: British Crop Protection Council.
Moltó, E., Martn, B., & Gutiérrez, A. (2001). Pesticide loss reduction by automatic adaptation of spraying on globular trees. Journal of Agricultural Engineering Research, 78, 35–41.
Nordmeyer, H. (2006). Patchy weed distribution and site-specific weed control in winter cereals. Precision Agriculture, 7, 219–231.
Oberti, R., Marchi, M., Tirelli, P., Calcante, A., Iriti, M., Tona, E., et al. (2016). Selective spraying of grapevines for disease control using a modular agricultural robot. Biosystems Engineering, 146, 203–215.
Osterman, A., Godesa, T., Hočevar, M., Sirok, B., & Stopar, M. (2013). Real-time positioning algorithm for variable-geometry air-assisted orchard sprayer. Computers and Electronics in Agriculture, 98, 175–182.
Paice, M., Miller, P., & Bodle, J. (1995). An experimental sprayer for the spatially selective application of herbicides. Journal of Agricultural Engineering Research, 60, 107–116.
Pertot, I., Caffi, T., Rossi, V., Mugnai, L., Hoffmann, C., Grando, M. S., et al. (2017). A critical review of plant protection tools for reducing pesticide use on grapevine and new perspectives for the implementation of IPM in viticulture. Crop Protection, 97, 70–84.
Riar, D. S., Ball, D. A., Yenish, J. P., & Burke, I. C. (2011). Light-activated, sensor-controlled sprayer provides effective postemergence control of broadleaf weeds in fallow. Weed Technology, 25, 447–453.
Slaughter, D. C., Giles, D. K., & Tauzer, C. (1999). Precision offset spray system for roadway shoulder weed control. Journal of Transportation Engineering, 125, 364–371.
Solanelles, F., Escolà, A., Planas, S., Rosell, J., Camp, F., & Gràcia, F. (2006). An electronic control system for pesticide application proportional to the canopy width of tree crops. Biosystems Engineering, 95, 473–481.
Sposito, M. B., Amorim, L., Bassanezi, R. B., Filho, A. B., & Hau, B. (2008). Spatial pattern of black spot incidence within citrus trees related to disease severity and pathogen dispersal. Plant Pathology, 57, 103–108.
Timmermann, C., Gerhards, R., & Kühbauch, W. (2003). The economic impact of site-specific weed control. Precision Agriculture, 4, 249–260.
Van De Zande, J., Achten, V., Schepers, H., Van Der Lans, A., Michielsen, J., Stallinga, H., et al. (2009). Plant-specific and canopy density spraying to control fungal diseases in bed-grown crops. In Proceedings of the 7th European conference on precision agriculture, ECPA 2009 (pp. 715–722). Wageningen, The Netherlands: Wageningen Academic Publishers.
Vieri, M., Lisci, R., Rimediotti, M., & Sarri, D. (2013). The RHEA-project robot for tree crops pesticide application. Journal of Agricultural Engineering, 44(s1), 359–362.
Waggoner, P. E., & Aylor, D. E. (2000). Epidemiology: A science of patterns. Annual Review of Phytopathology, 38, 71–94.
Walker, J. T. S., Suckling, D. M., & Wearing, C. H. (2017). Past, present, and future of integrated control of apple pests: The New Zealand experience. Annual Review of Entomology, 62, 231–248.
West, J. S., Bravo, C., Oberti, R., Lemaire, D., Moshou, D., & McCartney, H. A. (2003). The potential of optical canopy measurement for targeted control of field crop diseases. Annual Review of Phytopathology, 41, 593–614.
Williams, E. B., & Kuc, J. (1969). Resistance in Malus to Venturia inaequalis. Annual Review of Phytopathology, 7, 223–246.
Williamson, B., Tudzynski, B., Tudzynski, P., & Van Kan, J. A. L. (2007). Botrytis cinerea: The cause of grey mould disease. Molecular Plant Pathology, 8, 561–580.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Tona, E., Calcante, A. & Oberti, R. The profitability of precision spraying on specialty crops: a technical–economic analysis of protection equipment at increasing technological levels. Precision Agric 19, 606–629 (2018). https://doi.org/10.1007/s11119-017-9543-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-017-9543-4