
Abstract
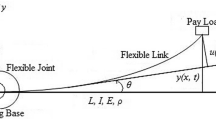
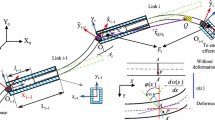
In this article, the mathematical modeling of a robotic system composed of n flexible links and a mobile platform has been considered. Most of the mechanical systems including the nonholonomic constraints are analyzed by Lagrangian formulation and its associated “Lagrange multipliers.” Eliminating these variables from the obtained equations is a time-consuming and cumbersome task. So, the Gibbs–Appell formulation and the assumed mode method are used to make the derivation of motion equations easier. Also, to model the system thoroughly and accurately, the dynamic interactions between the manipulator and the mobile platform and the coupling effects arising simultaneously from large motions and small deflections are taken into consideration. The links (assumed as 3D Timoshenko beams) undergo tension-compression, torsion and spatial bending (in two directions), while the effects of internal and external damping (as dissipative forces) are also considered in the mathematical modeling. A systematic approach is developed based on the derived formulation to establish the dynamic equations of motion. In order to alleviate the computational complexity of the suggested method, all the mathematical operations are carried out through \(3\times 3\) and \(3\times 1\) matrices only. Finally, this method is applied to a mobile manipulator with two flexible links to demonstrate the ability of the proposed method in deriving the equations of motion of such complex systems.
















Similar content being viewed by others

References
Staicu, S.: Dynamic equations of a mobile robot provided with caster wheel. Nonlinear Dyn. 58(1–2), 237–248 (2009)
Wiens, G.J.: Effects of dynamic coupling in mobile robotic systems. In: Proceedings of the SME robotics research world conference, Gaithersburg, MD, pp 43–57 (1989)
Meghdari, A., Durali, M., Naderi, D.: Investigating dynamic interaction between the one D.O.F manipulator and vehicle of a mobile manipulator. J. Intell. Robot. Syst.: Theory Appl. 28(3), 277–290 (2000)
Yamamoto, Y., Yun, X.: A modular approach to dynamic modeling of a class of robotics and automatio. IEEE Trans. Robot. Autom. 12(2), 41–48 (1997)
Thanjavur, K., Rajagopalan, R.: Ease of dynamic modeling of wheeled mobile robots (WMRs) using Kane’s approach. In: IEEE International Conference on Robotics and Automation, 4, Albuquerque, New Mexico, pp. 2926–2931 (1997)
Tanner, H.G., Kyriakopouos, K.J.: Mobile manipulator modeling with Kane’s approach. Robotica 19(6), 675–690 (2001)
Book, W.J.: Recursive Lagrangian dynamics of flexible manipulator arms. Int. J. Robot. Res. 3(3), 87–101 (1984)
Changizi, K., Shabana, A.A.: Recursive formulation for the dynamic analysis of open loop deformable multibody systems. J. Appl. Mech. Trans. ASME 55(3), 687–693 (1988)
Kim, S.-S., Haug, E.J.: A recursive formulation for flexible multibody dynamics. Part I: open-loop systems. Comput. Methods Appl. Mech. Eng. 71(3), 293–314 (1988)
Amirouche, F.M.L., Xie, M.: An explicit matrix formulation of the dynamical equations for flexible multibody systems: a recursive approach. Comput. Struct. 46(2), 311–321 (1993)
Nikravesh, P.E., Ambrosio, J.A.C.: Systematic construction of equations of motion for rigid-flexible multibody systems containing open and closed kinematic loops. Int. J. Numer. Method Eng. 32(8), 1749–1766 (1991)
Znamenacek, J., Valasek, M.: An efficient implementation of the recursive approach to flexible multibody dynamics. Multibody Syst. Dyn. 2(3), 227–251 (1998)
Lugris, U., Naya, M.A., Gonzalez, F., Cuadrado, J.: Performance and application criteria of two fast formulations for flexible multibody dynamics. Mech. Based Des. Struct. Mach. 35(4), 381–404 (2007)
Bae, D.S., Haug, E.J.: A recursive formulation for constrained mechanical system dynamics: part I. Open loop system. Mech. Struct. Mach. 15(3), 359–382 (1987)
Yu, Q., Chen, I.-M.: A general approach to the dynamics of nonholonomic mobile manipulator systems. ASME Trans. Dyn. Syst. Measur. Contr. 124(4), 512–521 (2002)
Khalil, W.: Dynamic modeling of robots using recursive Newton–Euler techniques. In: ICINCO 2010—Proceeding of the 7th International Conference on Informatics in Control, Automation and Robotics, vol. 1, pp. IS19–IS31
Vossoughi, G., Pendar, H., Heidari, Z., Mohammadi, S.: Assisted passive snake-like robots: conception and dynamic modeling using Gibbs–Appell method. Robotica 26(3), 267–276 (2008)
Mata, V., Provenzano, S., Cuadrado, J.I., Valero, F.: Serial-robot dynamics algorithms for moderately large number of joints. Mech. Mach. Theory 37(8), 739–755 (2002)
Korayem, M.H., Shafei, A.M.: Application of recursive Gibbs–Appell formulation in deriving the equations of motion of N-viscoelastic robotic manipulators in 3D space using Timoshenko beam theory. Acta Astronautica 83, 273–294 (2013)
Korayem, M.H., Shafei, A.M., Shafei, H.R.: Dynamic modeling of nonholonomic wheeled mobile manipulators with elastic joints using recursive Gibbs–Appell formulation. Sci. Iran. Trans. B: Mech. Eng. 19(4), 1092–1104 (2012)
Loudini, M., Boukhetala, D., Tadjine, M., Boumehdi, M.A.: Application of Timoshenko beam theory for deriving motion equations of a lightweight elastic link robot manipulator. Int. J. Autom. Robot. Auton. Syst. 5(2), 11–18 (2006)
Seidi, M., Markazi, A.H.D.: Performance-oriented parallel distributed compensation. J. Franklin Inst. 348(7), 1231–1244 (2011)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Korayem, M.H., Shafei, A.M. A new approach for dynamic modeling of n-viscoelastic-link robotic manipulators mounted on a mobile base. Nonlinear Dyn 79, 2767–2786 (2015). https://doi.org/10.1007/s11071-014-1845-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-014-1845-8