
Abstract
With the development of artificial intelligence (AI) and the Internet of Things (IoT), public transportation systems in our daily lives are smarter than ever. A large number of wireless sensors are distributed in roadside units (RSUs), collecting traffic flow and public vehicle information to monitor and learn about road congestion, subway arrival, and traffic accidents in real-time. In this paper, we propose probabilistic model checking based path planning for a multimodal transportation system. First, a traffic network with different means of travel is formalized as a directional graph, and the traffic congestion probability is generated from IoT sensor data. Moreover, a discrete-time Markov chain (DTMC) is introduced as the formal model to support quantitative verification. Second, users may have different travel requirements except the shortest path, so user-oriented critical paths are proposed. Then, the minimum cost and the minimum congestion requirements are defined in the form of probabilistic computation tree logic (PCTL) to describe the verification property for evaluating the selected path. We focus on the temporal relations of key points that a user needs to visit to build the travel path. Third, the optimal path is identified and confirmed based on the quantitative results returned by the probabilistic model checker, PRISM, which is a supporting tool that verifies the property against the formal model. Finally, case studies are conducted to demonstrate the feasibility and availability of our proposed method for the smart transportation system.










Similar content being viewed by others



Notes
https://github.com/cocoasspu/Applying-Probabilistic-Model-Checking-to-Path-Planningxhttps://github.com/cocoasspu/Applying-Probabilistic-Model-Checking-to-Path-Planningx
Fig. 8 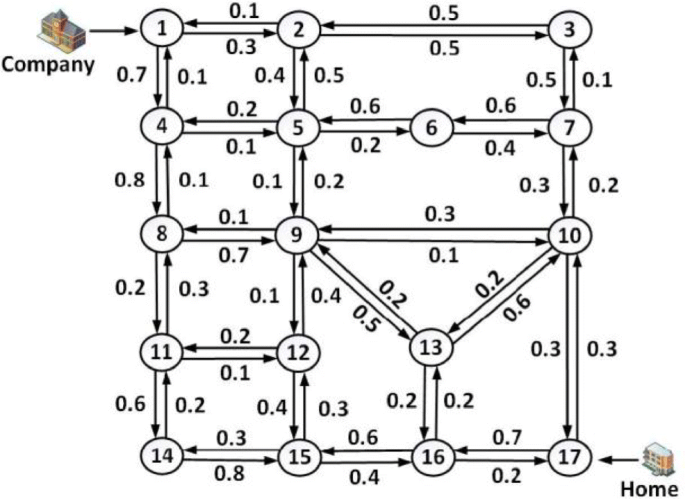
Example of TNBM
Table 3 Top 5 user-oriented critical paths of the KSP algorithm

References
Chaturvedi M, Srivastava S (2017) Multi-modal design of an intelligent transportation system. IEEE Trans Intell Transp Syst 18(8):2017–2027
Rakkesh ST, Weerasinghe AR, Ranasinghe RAC (2016) Effective urban transport planning using multi-modal traffic simulations approach. In: 2016 Moratuwa engineering research conference, pp 303–308
Chinnasamy P., J P, K L, D VA (2016) Region based find and spray scheme for co-operative data communication in vehicular cyber-physical systems. Intell Autom Soft Comput 23(3):501–507. https://doi.org/10.1080/10798587.2016.12201
Chang JR, Jheng YH, Chang CH, Lo CH (2015) An efficient algorithm for vehicle guidance combining Dijkstra and a algorithm with fuzzy inference theory. J Internet Technol 16(2):189–200
Schafle TR, Uchiyama N (2021) Probabilistic robust path planning for nonholonomic arbitrary-shaped mobile robots using a hybrid a* algorithm. IEEE Access 9:93466–93479
Gao H, Miao H, Zeng H (2013) Predictive web service monitoring using probabilistic model checking. Appl Math Inf Sci 7(1):139–148
Svorenova M, Kwiatkowska M (2016) Quantitative verification and strategy synthesis for stochastic games. Eur J Control 30:15–30
Patle BK, Pandey A, Jagadeesh A, Parhi DR (2018) Path planning in uncertain environment by using firefly algorithm. Defence Technol 14(6):691–701
Chen BY, Lam WHK, Li Q, Sumalee A, Yan K (2013) Shortest path finding problem in stochastic time-dependent road networks with stochastic first-in-first-out property. IEEE Trans Intell Transp Syst 14(4):1907–1917
Zhu L, Liu Q, Gao C, Wang J (2014) Research and realization of KTH path planning algorithm under large-scale data which meets the requirement for repeatability. In: 2014 seventh international symposium on computational intelligence & design, pp 138–143
Chang JR, Jheng YH, Chang CH, Lo CH (2015) An Efficient Algorithm For Vehicle Guidance Combining Dijkstra and a algorithm with fuzzy inference theory. J Internet Technol 16(2):189–200
Zhang S, Liu X, Wang M (2018) A novel ant colony optimization algorithm for the shortest-path problem in traffic networks. Autom Control Comput Sci 32(5):1619–1628
Sun N, Shi H, Han G, Wang B, Shu L (2020) Dynamic path planning algorithms with load balancing based on data prediction for smart transportation systems. IEEE Access 1(1):15907–15922
Guo C, Li D, Zhang G, Zhai M (2018) Real-time path planning in urban area via VANET-assisted traffic information sharing. IEEE Trans Veh Technol 67(7):5635–5649
Jie KW, Zhao GC, Sun XJ (2019) The shortest path problem and its critical edge in uncertain environment. IEEE Access 7:154414–154423
Sheng Y, Yuan G (2016) Shortest path problem of uncertain random network. Comput Ind Eng 99:97–105
Chatterjee K., De A., Chan FTS (2019) Real time traffic delay optimization using shadowed type-2 fuzzy rule base. Appl Soft Comput 74:226–241
Yu XY, Fan ZY, Ou LL, Zhu F, Guo YK (2019) Optimal path planning satisfying complex task requirement in uncertain environment. Robotica 37(11):1956–1970
Liu L, Yao J, He D, Chen J, Guo J (2021) Global dynamic path planning fusion algorithm combining jump-A* algorithm and dynamic window approach. IEEE Access 9:19632– 19638
Bielli M, Boulmakoul A, Mouncif H (2006) Object modeling and path computation for multimodal travel systems. Eur J Oper Res 175(3):1705–1730
Yang Y, Chen J, Du Z (2020) Analysis of the passenger flow transfer capacity of a bus-subway transfer hub in an urban multi-mode transportation network. Sustainability 12(6):2435. https://doi.org/10.3390/su12062435
Dai W, Pang B, Low KH (2021) Conflict-free four-dimensional path planning for urban air mobility considering airspace occupancy. Aerosp Sci Technol 119:107154. https://doi.org/10.1016/j.ast.2021.107154
Davoodi M, Ghaffari M (2021) Shortest path problem on uncertain networks: An efficient two phases approach. Comput Ind Engi 157:107302. https://doi.org/10.1016/j.cie.2021.107302
Liao X, Wang JY, Ma L (2021) An algorithmic approach for finding the fuzzy constrained shortest paths in a fuzzy graph. Complex Intell Syst 7(1):17–27
Kim G, Ong YS, Cheong T, Tan PS (2016) Solving the dynamic vehicle routing problem under traffic congestion. IEEE Trans Intell Transp Syst 17(8):2367–2380
Bi K, Han D, Wang JK (2016) Maximum probability attack paths dynamic generation algorithm. Comput Sci Inf Syst 13(2):677–689
Shirdel GH, Abdolhosseinzadeh M (2016) The shortest path problem in the stochastic networks with unstable topology. SpringerPlus 5:1529. https://doi.org/10.1186/s40064-016-3180-7
Veysmoradi D, Vahdani B, Sartangi MF, Mousavi SM (2018) Multi-objective open location-routing model for relief distribution networks with split delivery and multi-mode transportation under uncertainty. Sci Iran 25(6):3635–3653
Buchholz P, Dohndorf I (2020) A multi-objective approach for PH-graphs with applications to stochastic shortest paths. Math Methods Oper Res 93(1):153–178
Wu C, Zhou S, Xiao L (2020) Dynamic path planning based on improved ant colony algorithm in traffic congestion. IEEE Access 8:180773–180783
Ahmad A, Din S, Paul A, Jeon G, Ahmad M (2019) Real-time route planning and data dissemination for urban scenarios using the Internet of Things. IEEE Wirel Commun 26(6):50–55
Zhu D, Du H, Sun Y (2018) Research on path planning model based on short-term traffic flow prediction in intelligent transportation system. Sensors 18(12):4275. https://doi.org/10.3390/s18124275
Eppstein D (1998) SIAM. Finding the K shortest paths. SIAM J Comput 28(2):652–673
Kumar P, Dudeja C (2021) Shadowed type 2 fuzzy-based Markov model to predict shortest path with optimized waiting time. Soft Comput 25(2):995–1005
Acknowledgements
This paper is supported by National Natural Science Foundation of China (No.61902236).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Yang, X., Wei, Y., Shi, L. et al. Applying Probabilistic Model Checking to Path Planning for a Smart Multimodal Transportation System Using IoT Sensor Data. Mobile Netw Appl 28, 382–393 (2023). https://doi.org/10.1007/s11036-023-02089-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11036-023-02089-8