
Abstract
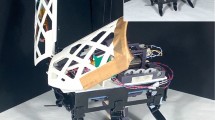
Jumping is used in nature by many small animals to locomote in cluttered environments or in rough terrain. It offers small systems the benefit of overcoming relatively large obstacles at a low energetic cost. In order to be able to perform repetitive jumps in a given direction, it is important to be able to upright after landing, steer and jump again. In this article, we review and evaluate the uprighting and steering principles of existing jumping robots and present a novel spherical robot with a mass of 14 g and a size of 18 cm that can jump up to 62 cm at a take-off angle of 75°, recover passively after landing, orient itself, and jump again. We describe its design details and fabrication methods, characterize its jumping performance, and demonstrate the remote controlled prototype repetitively moving over an obstacle course where it has to climb stairs and go through a window. (See videos 1–4 in the electronic supplementary material.)
Similar content being viewed by others


References
Alexander, R. M. (1988). Elastic mechanisms in animal movement. Cambridge: Cambridge University Press.
Alexander, R. M. (2003). Principles of animal locomotion. Princeton: Princeton University Press.
Armour, R., Paskins, K., Bowyer, A., Vincent, J. F. V., & Megill, W. (2007). Jumping robots: a biomimetic solution to locomotion across rough terrain. Bioinspiration and Biomimetics Journal, 2, 65–82.
Bennet-Clark, H. C. (1975). The energetics of the jump of the locust Schistocerca gregaria. Journal of Experimental Biology, 63(1), 53–83.
Brackenbury, J., & Hunt, H. (1993). Jumping in springtails: mechanism and dynamics. Journal of Zoology, 229, 217–236.
Burdick, J., & Fiorini, P. (2003). Minimalist jumping robot for celestial exploration. The International Journal of Robotics Research, 22(7), 653–674.
Burrows, M. (2003). Biomechanics: Froghopper insects leap to new heights. Nature, 424(6948), 509.
Card, G., & Dickinson, M. (2008). Performance trade-offs in the flight initiation of drosophila. Journal of Experimental Biology, 211(3), 341.
Faisal, A. (2001). Coordinated righting behaviour in locusts. Journal of Experimental Biology, 204(4), 637–648.
Frantsevich, L. (2004). Righting kinematics in beetles (insecta: Coleoptera). Arthropod Structure and Development, 33(3), 221–235.
Gronenberg, W. (1996). Fast actions in small animals: springs and click mechanisms. Journal of Comparative Physiology A: Sensory, Neural, and Behavioral Physiology, 178(6), 727–734.
Hollander, M., & Wolfe, D. A. (1999). Nonparametric statistical methods. New York: Wiley.
Kaspari, M., & Weiser, M. D. (1999). The sizegrain hypothesis and interspecific scaling in ants. Functional Ecology, 13(4), 530–538.
Kovac, M., Guignard, A., Nicoud, J. D., Zufferey, J. C., & Floreano, D. (2007). A 1.5 g sma-actuated microglider looking for the light. In IEEE international conference on robotics and automation, pp. 367–372.
Kovac, M., Fuchs, M., Guignard, A., Zufferey, J., & Floreano, D. (2008). A miniature 7 g jumping robot. In IEEE international conference on robotics and automation, pp. 373–378.
Kovac, M., Schlegel, M., Zufferey, J. C., & Floreano, D. (2009a). A miniature jumping robot with self-recovery capabilities. In IEEE/RSJ international conference on robotics and automation, pp. 583–588.
Kovac, M., Zufferey, J., & Floreano, D. (2009b). Towards a self-deploying and gliding robot. In Floreano, D., Zufferey, J. C., Srinivasan, M. V., & Ellington, C. (Eds.), Flying insects and robots Berlin: Springer, Chap. 19.
Lambrecht, B. G. A., Horchler, A. D., & Quinn, R. D. (2005). A small, insect-inspired robot that runs and jumps. In IEEE/RSJ international conference on robotics and automation, pp. 1240–1245.
Roberts, T. J., & Marsh, R. L. (2003). Probing the limits to muscle-powered accelerations: lessons from jumping bullfrogs. Journal of Experimental Biology, 206(15), 2567–2580.
Scarfogliero, U., Stefanini, C., & Dario, P. (2007). Design and development of the long-jumping “grillo” mini robot. In IEEE international conference on robotics and automation, pp. 467–472.
Stoeter, S. A., Rybski, P. E., & Papanikolopoulos, N. (2002). Autonomous stair-hopping with scout robots. In IEEE/RSJ international conference on intelligent robots and systems, Vol. 1, pp. 721–726.
Sugiyama, Y., Yamanaka, M., & Hirai, S. (2005). Circular/spherical robots for crawling and jumping. In IEEE international conference on robotics and automation, pp. 3595–3600.
Tsukagoshi, H., Sasaki, M., Kitagawa, A., & Tanaka, T. (2005). Design of a higher jumping rescue robot with the optimized pneumatic drive. In IEEE international conference on robotics and automation, pp. 1276–1283.
Ullman, D. G. (2002). The mechanical design process. New York: McGraw-Hill.
Weiss, P. (2001). Hop… hop… hopbots!: designers of small, mobile robots take cues from grasshoppers and frogs. Science News, 159, 88.
Yim, M., Roufas, K., Duff, D., Zhang, Y., Eldershaw, C., & Homans, S. (2003). Modular reconfigurable robots in space applications. Autonomous Robots, 14(2), 225–237.
Zufferey, J. C., Klaptocz, A., Beyeler, A., Nicoud, J. D., & Floreano, D. (2007). A 10-gram vision-based flying robot. Advanced Robotics, 21(14), 1671–1684.
Author information
Authors and Affiliations
Corresponding author
Electronic Supplementary Material
Below is the link to the electronic supplementary material. (MPG 17.173 MB)
Rights and permissions
About this article
Cite this article
Kovač, M., Schlegel, M., Zufferey, JC. et al. Steerable miniature jumping robot. Auton Robot 28, 295–306 (2010). https://doi.org/10.1007/s10514-009-9173-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10514-009-9173-4