
Abstract
In this work we explore the opportunities presented by partitioning contestants in contest into disjoint groups, each competing in an independent contest, with its own prize. This, as opposed to most literature on contest design, which focuses on the setting of a single “grand” (possibly multi-stage) contest, wherein all potential contestants ultimately compete for the same prize(s), with few exceptions that do consider contest partitioning, yet with conflicting preference results concerning the optimal structure to be used. Focusing on binary contests, wherein the quality of contestants’ submissions are endogenously determined, we show that contest partitioning is indeed beneficial under some condition, e.g., whenever the number of contestants, or the prize amount, are “sufficiently large”, where the exact size requirements are a function of the partitioning cost. When partitioning does not entail any cost, we show that it is either a dominating or weakly dominating strategy, depending on the way the organizer’s expected benefit is determined. The analysis is further extended to consider partitioning where some of the sub-contests used contain a single contestant (a singleton). We conclude that contest partitioning is an avenue that contest designers can and should consider, when aiming to maximize their profit.
Similar content being viewed by others

1 Introduction
Historically, contests have been primarily used to determine supremacy. In modern times, they are frequently employed as a means of incentivizing effort in multi-agent systems [8, 50, 62, 72], especially in the areas of innovation and crowdsourcing. Consequently, much research has been done exploring the theory and practical applications of contest design [12,13,14, 20, 64].
The literature on contest theory has largely focused on contests wherein all contestants compete with each other for the same prize (or set of prizes). This is also true for tournaments, where contests are carried out in stages [21, 60, 66], but all competitors ultimately compete for the same reward. However, in many real-world settings, there is no requirement that all potential contestants participate in one single contest. Instead, the contest organizer can create several completely separate contests, assigning different contestants to each one. Each contest would have its own prize, and can even have different rules. Meanwhile, the organizer can still benefit from the collective work done in all the different contests. For example, if the goal is to find a solution to a certain problem in a hackathon, the organizer can run several smaller hackathons, each with its own winner and prize and possibly taking place at a different location and time. The organizer would then benefit from the best solution obtained from all the hackathons. Similarly, if a ministry of education wants to promote physical exercise among students, they can run a separate contest in each school, rather than having one national contest.
The question then arises: can such contest partitioning benefit the organizer? Can it increase her expected profit? Prior works attempting to answer these questions have focused on effort-based contests (where contestants decide the amount of effort they exert) and offer partial and mixed conclusions. Most of these works are based on restricted models, which are limited in the number of contests (typically two) used, prospective contestants, prizes, and the partition flexibility of the organizer [2, 5, 23, 32, 40]. Other works allow for more tractable partitioning [9, 19, 35], finding that the dominance relation (between a grand and partitioned contest) depends on the contest characteristics, such as the winner-determination protocol, level of randomness, and number of contestants. These works are limited by the fact that they take the sum of prizes to be awarded as equal to the original prize assigned to the grand contest, rather than optimizing each sub-contest independently. Most importantly, all the above works have neglected partitioning cost, which, as our analysis shows, is the primary constraining cost of the optimal partitioning.
This paper focuses on the binary contest model, wherein contestants only decide whether or not to participate, while the quality of their submissions is determined endogenously. This model captures settings where the quality of the submission does not depend on effort, such as beauty contests, or where contestants’ evaluation is based on activities that took place before the contest, such as in a lifetime achievement award. Consider, for example, an award nomination. Here, contestants only strategize on whether to apply or not, without having a chance to further enrich their (past) achievements at the time of nomination. Here, the choice to participate is not straightforward, as there is a cost associated with participating, such as a reputational loss in the case of not winning a prestigious award. Many previous works have studied this model [16, 26, 30, 33, 39, 44, 59], offering much motivation and examples within. One important modeling choice distinguishing binary contest variants is the participants’ knowledge regarding their own contribution quality if participating in the contest—either assuming complete knowledge [26, 33] or no knowledge other than the underlying distribution of contribution qualities [49, 59]. In this paper we consider both variants. Furthermore, we provide analysis for the two most common aggregation functions based on which the organizer’s utility is defined. The first is the sum of contributions received [26, 31] and the second is the maximum contribution among the ones received [16, 35].
Can contest partitioning benefit the organizer of binary contests? Our core result is a strong affirmative answer. Essentially, we show that in binary contests where contestants are aware of their own quality performances before participating, the contest organizer necessarily benefits from partitioning (and further partitioning) the contest as long as partitioning costs are sufficiently small or when partitioning is costless. Interestingly, this does not generally hold in other types of contests as we illustrate in the analysis section. Furthermore, even when partitioning is associated with some cost, partitioning is generally beneficial given a sufficient number of contestants (when using the sum aggregation function) or sufficiently large prizes (regardless of the aggregation function used).
For the case where contestants are unaware of their contribution qualities beforehand, we show that contest-partitioning has no contribution whatsoever when the organizer benefits from the sum aggregation function. On the other hand, when benefiting from the maximum contribution quality among the ones received we find that partitioning is a weakly dominating strategy as long as partitioning is costless.
We further extend the analysis in a way that allows partitioning into sub-contests that include single agents (singletons). Here, we find that, putting aside the costs associated with partitioning, when contestants are a priori unaware of their contribution qualities, the use of singletons will provide the maximum possible benefit. Hence when partitioning is costless, a singleton-based contest structure dominates all others. Table 1 summarizes the main results of the paper.
With the recent increased popularity of contests, including well known contests as the Netflix prize, Darpa challenges and the Hult prize, as well as coding competitions (e.g., Kaggle, CrowdAnalytix, taskCN, TopCoder)Footnote 1 and other crowdsourcing context-related [1, 8, 15, 41, 72, 73], our positive results concerning the benefit in contest partitioning offer important and highly applicable insights to contest organizers regarding the way such contests should be designed.
2 Related work
Contest design, or the set of rules that define a contest, has focused much interest in research, in particular in the mechanism design community [25, 26, 42, 43, 52,53,54] as contests are a highly effective mechanism for soliciting effort of the crowd. As such, much work studying the way different contest designs affect the strategic behavior of contestants is available. In this section we review it primarily in the context of contest partitioning.
For years, the majority of contest-design literature has been considering models where prize allocation rules rely on the amount of efforts contestants exert in the contest [3, 15, 20, 22, 57, 63]. For the past decade, however, there is a growing interest in binary contests in which contestants’ strategic behavior is captured merely by their decision whether or not to participate in the contest while their quality of contribution if participating is exogenously set [16, 26, 30, 33, 39, 45, 46, 48, 59, 67], which is the model used in this paper, with various justifications therein.
While most prior work studying contest design relies on a model of a single grand contest, some literature does consider parallel contest designs where the organizer benefits from some aggregation of all contributions, as in our contest partitioning model. The models used in these studies, as discussed in the former section, are quite degenerate in terms of number of contests (typically two), number of prospective contestants, the prizes used and the partition flexibility of the contest designer. Azmat and Moller [2] consider a setting of two identical parallel contests, with homogeneous agents, analyzing the optimal allocation of prizes between the two. Büyükboyaci [5] considers a setting with only two agents with different abilities and compares the organizer’s profit from a single contest and two parallel contests, among which each agent initially chooses to participate in (i.e., the number of participants in each contest is either zero, one or two). Hafalir et al. [32] compare the equilibria of a single contest with that of two contests, with fixed prizes, when agents are heterogeneous in their abilities and this information is private. Körpeoglu et al. [40] study the effect of running more than a single contest on organizer’s profit, however in their model each agent may participate in multiple contests. Gao et al. [23] use an arbitrary partitioning into two sub-contests of two agents, as a baseline for comparison with their primary design (non-related to contest-partitioning) which their work is focused on. While these studies compare the choice between a single contest and multiple contests (from the agents’ and organizer’s point of view) based on the prize structure, none of them has analyzed the optimal partition to multiple sub-contests, as in our paper. Furthermore, none of the models used consider contest partitioning costs.
Very few works provide general theoretical results on optimal partitioning into multiple sub-contests, all relying on an effort-based contest model. Epstein et al. [18] and Fu and Lu [19] consider an effort-based contest with multiple prizes and probabilistic winner-determination mechanism, and show that the grand contest dominates any partition into sub-contests. In contrast, Chowdhury and Kim [9] show that this latter result depends on the specific multi-winner determination protocol, that if the protocol is changed - the finding is reversed (that is, a division into sub-contests elicits higher equilibrium efforts than with a grand multi-winner contest). Hu and Wang [35] consider the design of a multiple sub-contests, each dealing with one attribute/dimension of the contest,Footnote 2 showing that the optimal scheme (joint versus separate sub-contests) depends on the contest characteristics, such as number of contestants, their heterogeneity, the level of randomness in their performances, etc. We note that the models used in these latter works assume that the sum of prizes is given and fixed, i.e., the sum of prizes allocated to the sub-contests equals to the original prize assigned to the grand contest, meaning that the sub-contents used are not optimized. Furthermore, they all assume there is no additional cost for the organizer to running more (sub-)contests.Footnote 3 For the reasons mentioned above, none of the above works can provide general theoretical results related to contest partitioning in binary contests, such as guarantees for benefit and sub-contests size. Our work allows the organizer to adjust the prize amounts to the sub-contests. This change turns to be instrumental, as the advantage in contest partitioning derives from the ability to maintain similar performance level while substantially reducing the amount allocated as prizes. We also consider partitioning costs, and obtain that contest partitioning is advantageous for “sufficiently large” contests.Footnote 4
An additional contest design that is somehow related to contest partitioning is a tournament (also known as a multi-stage elimination contest). Here, contestants are repeatedly divided into sub-contests, while only the winners are promoted to the next stage. Several authors have shown that a multi-stage contest may induce higher efforts than a one-stage contest, for various underlying contest models and under different circumstances and conditions [29, 57]. Konrad and Kovenock [38] provide a comprehensive equilibrium analysis to a “multi-battle” contest in which the winner is the one who accumulates a sufficiently large number of victories. Fu and Lu [21] demonstrate that the optimal structure of a multi-stage sequential elimination contest is elimination of one contestant at each stage. One inherent main difference between our contest partitioning model and multi-stage elimination contests is that in the latter it is typically the grand prize (or set of prizes) awarded to the “grand” winner/s that influences contestants’ strategic considerations, whereas in our case each sub-contest is fully independent. Furthermore, in multi-stage elimination contests, a contestant may find itself competing in several sub-contests along the process.
Finally, we acknowledge a substantial body of work dealing with (multi-) prize allocation in contests [1, 26, 58, 59, 61, 70], as opposed to winner-takes-all. Other relevant works explore the optimal information-disclosure strategy where the contest organizer can set some intermediate prizes as milestones throughout the process in which some contestants’ performances are revealed [4, 28, 34]. Much like the division into sub-contests, the division of a grand prize into sub-prizes may increase participation and effort-exertion incentives. The analysis of the two cases, however, is completely different.
To summarize, Table 2 provides an overview of related literature from recent years, where the models have been classified according to a variety of characteristics. As can be seen, none of these papers has investigated the question of contest partitioning into sub-contests within the binary model where participants’ knowledge regarding their own contribution quality is either full awareness or unawareness.
3 Model and preliminaries
Binary contests. We consider the binary contest model [16, 26, 30, 44]. The model stipulates a contest organizer and a set \(A=\{A_1,...,A_k\}\) of fully-rational and self-interested agents (the potential contestants). Each agent decides whether or not to participate in the contest. Participation incurs a cost c, identical for all agents. Each participating agent exhibits some “quality”. The participating agents’ qualities are the basis for the organizer’s utility (and the reason for running the contest in the first place). In the most general sense, the utility the organizer derives from the agents’ qualities is defined by an aggregation function, g, over the qualities of the participating agents. The common aggregation functions considered in the contest design literature are:
The max aggregation function fits settings such as crowdsourcing contests where the organizer benefits significantly from the top contribution, as it could lead to a breakthrough solution (e.g., XPRIZE competition); coding competitions (e.g., Google Code Jam); research and development grants where the funding agency benefits from the advancement in knowledge or technology that comes from the top research project; art and film festivals where the organizer showcases a variety of works but often benefits the most from the most acclaimed piece, as it draws attention and prestige (e.g., the Cannes Film Festival); and startup competitions where the venture capitalists/business organizations seek to investing in the most promising business plan or startup idea.
The use of the sum aggregation function is prevalent in settings where each contribution adds some value, regardless of its individual quality. Typical examples include fundraising or donation challenges where the total amount of donations collected is the primary goal of the organizers (e.g., girl scouts who are famously known for their cookie sales); crowdfunding campaigns, where creators benefit from the total sum of pledges from backers (e.g., Kickstarter or Indiegogo); social media challenges where the organizers benefit from the total engagement (likes, shares, comments) generated by participants; and petitions and awareness campaigns, where the organizers benefit from the total number of signatures or participants.
Agents are heterogeneous in the sense that they may differ in their exhibited quality. Each agent’s exhibited quality, q, is assumed to be drawn from a common probability distribution function \(f(\cdot )\) with bounded support (with corresponding cumulative distribution function \(F(\cdot )\)). It is assumed that f is common knowledge among the organizer and all agents.Footnote 5
While common probability distribution function \(f(\cdot )\) is assumed to be common knowledge, it is assumed that no agent knows its actual realization of any other agent. With regard to the agent itself, there are two models in the literature:
-
Full awareness—each agent knows its own quality realization before making its participation decision [26, 33], and
-
Unawareness—agents do not know their quality realization before making its participation decision [49, 59].
To encourage participation, the organizer offers a prize \(M\ge c\), awarded to the agent with the highest exhibited quality (among the participating agents), with a random tie breaking rule. The goal of each agent is to maximize its expected profit, defined as the expectation of the prize received minus the cost c incurred for participating. The organizer’s goal is to maximize her total profit, defined as her utility from the qualities minus the prize she pays. If none of the agents participates, the prize is not awarded and the organizer’s utility is assumed to be zero.
Formally, a binary contest is a quintuple \(C=(A,M,f,c,g)\), where the components are as defined above.
Contest Partitioning. We extend the above standard model to accommodate contest partitioning (see Fig. 1 for a schematic illustration of the process). In a partitioned contest the agents are partitioned into \(n\le k\) disjoint subsets \(D_1,\ldots ,D_n\), \(|D_i|> 1\) for all i. Each \(D_i\) defines a sub-contest, with the agents thereof competing amongst themselves, and the best awarded the prize \(M_i\). An agent assigned to sub-contest \(D_i\) can decide whether or not to participate in this sub-contest, but cannot participate in any other sub-contest. The participation cost, c, and quality distribution, f, remain as in the basic model. Importantly, the aggregation function, g, also remains as in the basic model; that is, the utility of the organizer is obtained from the aggregate qualities of all agents in all contests.
Partitioning a contest may entail a cost. We stipulate a price \(c_p\) associated with each partitioning of the contest into smaller sub-contests; the partitioning cost \(c_p\) represents the cost associated with running separate contests.Footnote 6 In all, if the contest is partitioned into n sub-contests, then the total partitioning cost is \((n-1)c_p\).
The organizer’s goal is to maximize her total profit, defined as the aggregate function over the qualities of all participating agents, minus the sum of the prizes awarded and the partitioning costs incurred. Formally, a partitioned contest is a sextuple \(P=(\mathcal {A},\mathcal {M},f,c,g,c_p)\), where \({\mathcal A}=(D_1,\ldots ,D_n)\) is the partition structure, \({\mathcal M}=(M_1,\ldots ,M_n)\) is the prize sequence, f, c, g, as in the regular model, and \(c_p\) is the partitioning cost. Each \(C_i=(D_i,M_i,f,c,g)\) is called a sub-contest. Note that the model does not constrain the prizes to be awarded in the sub-contests, which can be different for different sets of agents. A partitioned contest is optimal if it maximizes the organizer’s expected total profit, where the maximization is over all partitioning structures \(\mathcal A\) and prizes \(\mathcal M\) (for a given \(f,c,g,c_p\)). A partition structure is optimal if it is the partition structure of some optimal partitioned contest (for a given \(f,c,g,c_p\)).

A schematic illustration of the contest partitioning process
4 Equilibrium analysis
We begin with reviewing the equilibrium for a contest (or sub-contest) instance \(C=(A,M,f,c,g)\). This will be the basis for analyzing the optimal partition structures in the following sections. We note that the organizer’s aggregation function g (either max or sum) does not affect the agents’ strategies.
4.1 Full awareness model
A comprehensive equilibrium analysis of a binary contest where agents are a priori aware of their contribution quality before having to decide on participation is provided by Ghosh and Kleinberg [26]. They show that the best-response strategy is threshold-based, i.e., each agent \(A_i\) participates iff its quality is greater than some threshold \(r_i\). The intuition for this is simple: in case \(A_i\) should participate given quality \(q_i\), then its profit from participating is even greater for any \(q>q_i\). Similarly, if according to the optimal strategy \(A_i\) should opt to avoid participating, then the same should hold for any \(q<q_i\). While multi-equilibria are sometimes possible, there always exists a symmetric equilibrium, wherein all agents of any given contest use the same threshold [30, 49]. Similar to prior work, we focus on this symmetric equilibrium, which is natural and provides all agents a similar a priori expected profit.
Given that all other agents are using a threshold r, the expected profit of agent \(A_i\) when participating with quality \(q_i\), denoted \(B^P(q_i)\), is:
i.e., \(A_i\) is awarded the prize M whenever all other agents’ qualities are either below the threshold r (in which case they opt not to participate) or below \(q_i\) (in which case they lose). If not participating, \(A_i\) gains zero. Hence the best response strategy for the agent is to participate whenever \(B^P(q_i)\ge 0\), and not participate otherwise. The equilibrium threshold r is thus the quality \(q_i\) for which \(B^P(q_i)=0\).Footnote 7 So, r is such that:
That is, the threshold used is the one at which the cost of participating equals the expected winnings (i.e., the prize awarded multiplied by the chance of winning).
The contest organizer benefits from the aggregate over all agents’ qualities. Let \(U_{g,r}\) be the organizer’s expected utility from the contestants’ qualities when they all use threshold r, and she uses the aggregation function g. The organizer’s overall expected profit when running the contest, denoted \(B^{org}\), is:
as all agents use the same threshold r, and the prize is awarded in case at least one of the agents participates, which occurs with probability \(1-F(r)^k\).
When running a partitioned contest, the thresholds to be used in the different contests may differ. Let \(\vec {r}\) be the (k-length) sequence of thresholds used by the agents (each according to the threshold of its associated sub-contest). Note that for both aggregation functions sum and max, the expected utility gained by the organizer from the agents’ performance is fully determined by \(\vec {r}\) (and not by the partition). Denote this expected utility by \(U_{g,\vec {r}}\). The prize in each sub-contest \(C_i\) is awarded in case at least one of the agents there participates, which occurs with probability \(1-F(r_i)^{|D_i|}\). Therefore the organizer’s expected utility is given by:
4.2 Unawareness model
A comprehensive equilibrium analysis for the case of a binary contest where agents do not know their own quality q before making their participation decisions, but rather only know the probability distribution \(f(\cdot )\), is provided by Levy et al. [49]. In this model, the equilibrium is based on mixed strategies, such that each agent \(A_i\) (\(\forall A_i\in A\)) participates with probability \(p_i\) (\(0 \le p_i \le 1\)). Here too, one equilibrium that necessarily exists is symmetric, wherein \(p_i = p\) for all i. We focus on this equilibrium, which is the most natural and fair one, and the one typically adopted in related work.
Given that all other agents participate with probability p, the expected profit of agent \(A_i\) if participating, denoted \(B^P\), is given by:
i.e., agent \(A_i\) is awarded the prize M whenever its quality is the maximum among those of all agents that compete. If not participating, \(A_i\) gains zero. The best response strategy of every agent \(A_i\) is thus to participate iff \(B^{P}>0\). The equilibrium should thus satisfy: (a) \(B^P< 0\) if \(p=0\); (b) \(B^P> 0\) if \(p=1\); and (c) \(B^P=0\) if \(0<p<1\). Furthermore, based on (5), Levy and Sarne [43] prove that the symmetric equilibrium is: (a) fully based on pure strategies such that \(p=1\) (all agents participate) whenever \(\frac{c}{M}\le \frac{1}{k}\) (i.e., whenever the individual’s expected prize if all agents participate is greater than the participation cost); (b) fully based on pure strategies such that \(p=0\) (all agents opt not to participate) whenever \(\frac{c}{M} \ge 1\) (i.e., whenever the participation cost is greater than the offered prize); and (c) based on mixed strategies, otherwise, where p obtained by equating (5) to zero (the expected profit of agent \(A_i\) if not participating) and is the solution toFootnote 8:
The expression in (6) can be written as: \(c= \frac{M(1-(1-p)^k)}{kp}\). The term \(M(1-(1-p)^k)\) is the expected prize actually awarded (as the prize is awarded only when at least one agent participates, i.e., with probability \(1-(1-p)^k\)). The term kp is the expected number of participating agents. Therefore, the ratio represents the expected payment to a participating agent. Equating it to the participation cost means the agent’s profit is zero, which is the characterization of the mixed equilibrium solution.
The organizer’s expected utility from the agents’ qualities when they use participation probability p, and she uses the aggregation function g is:
i.e., the prize is awarded in case at least one of the agents participates, which occurs with probability \(1-(1-p)^k\).
When running a partitioned contest, the participation probabilities to be used in the different contests may differ. Let \(\vec {p}\) be the (k-length) sequence of probabilities used by the agents (each according to the probability of its associated sub-contest). The organizer’s expected utility is given by (for considerations similar to those provided for the full-awareness case):
4.3 Equilibrium extraction
Whenever the cumulative distribution function \(F(\cdot )\) can be expressed in a simple closed form, one can directly extract the equilibrium from (2) and (6), depending on the model variant used. For more complex distributions, the cumulative distribution function might be very challenging to determine. In such cases, various numerical methods can be used, as well as other tools for computing equilibria such as simulation and deep-learning based approaches [17, 24, 27, 71].
5 Partitioning with full awareness
We begin with the case where agents know their quality when deciding if to participate.
5.1 Sufficiently small partitioning costs
We show that putting aside partitioning costs, contest partitioning per-se is always beneficial whenever the agents are a priori aware of their own contribution qualities. So, if the contest partitioning costs are sufficiently small, and in particular when partitioning does not entail any cost, it is always beneficial to further partition any sub-contest of size 4 and more. It is therefore the partitioning cost that constrains further partitioning of partitionable sub-contests.
Theorem 1
In the full awareness model, for \(c_p\) sufficiently small, it is always beneficial to partition any (sub)-contest of size \(\ge 4\) into two sub-contests. That is, for any partitioned contest \(P=(\mathcal {A},\mathcal {M},f,c,g,c_p)\), there exists a \(\hat{c}\) such that for any \(c_p<\hat{c}\), if there exists j with \(|D_j|\ge 4\) then there exists a partitioned contest \(P'=({\mathcal A'},\mathcal {M'},f,c,g,c_p)\) such that in \(\mathcal {A'}\) the sub-contest \(D_j\) is split into two sub-contests, each of which is of size at least 2, and \(P'\) yields a higher expected profit than P to the organizer.
Proof
Consider a partitioned contest \(P=(\mathcal {A},{\mathcal M},f,c,g,c_p)\), wherein \(c_p\) is sufficiently small and agents in each sub-contest \(C_j\) all use the same strategy. Let \(\vec {r}\) be the (k-length) sequence of thresholds used by the agents (each according to the threshold of its associated sub-contest). The expected profit of the organizer from the entire partitioned contest is given by (4). We now show that this profit increases with further partitioning of the contest (to contests of size \(>1\)).
Consider some sub-contest \(C_i\) with prize \(M_i\), and \(k\ge 4\) agents, all using threshold \(r_i\). Then, by (2), \(c=M_iF(r_i)^{k-1}\). Now, split \(C_i\) into two sub-sub-contests, \(C',C''\), of sizes j and \(k-j\), respectively (\(2\le j<k-1\)). Allocate prizes \(M'=c\cdot F(r_i)^{-(j-1)}\) and \(M''=c\cdot F(r_i)^{-(k-j-1)}\) to \(C'\) and \(C''\), respectively. Then, again by (2), the thresholds of all agents in \(C'\) and \(C''\) remains \(r_i\). So, \(\vec {r}\) remains the same, and hence the first term of (4) does not change. We prove that the second term (which is subtracted) decreases. Indeed,
where the last inequality holds as \(F(r_i)< 1\) and \(j<k\). Hence, the organizer’s expected profit necessarily increases by this split. Therefore, by (4), whenever
such partition is beneficial. \(\square\)
We note that in the above proof the prizes awarded in sub-contests after the split may not be optimal. With optimal sub-prizes, the benefit from splitting may increase even further.
Repeatedly applying Theorem 1 we obtain:
Corollary 1
In the full awareness model, if the partitioning cost is sufficiently small, then in an optimal partitioning structure all sub-contests consist of 2 or 3 agents.
Corollary 2
In the full awareness model and sufficiently small partitioning cost, there are only a linear number of partition structures to consider when computing the optimal partitioned contest.
where both corollaries hold for both the sum and max aggregation functions.
Notice that the proof to Theorem 1 uses prizes \(M'\) and \(M''\) such that the expected sum of awarded prizes does not necessarily equal the initial expected awarded prize (i.e., the “prize budget” is not fixed). In fact, the proof rests on the fact that in the partitioned contest, the organizer can induce the same equilibrium behavior with a smaller expected pay. As we later discuss, results found in effort-based contests literature do not necessarily apply to our model, and so Theorem 1 is unique to binary contests where agents are fully aware of their own quality contributions.
5.2 Partitioning with partitioning costs
While with low partitioning costs partitioning is proved to be beneficial when agents are a priori aware of their contribution qualities, in many real-life settings the partitioning of a contest into sub-contests may be associated with substantial cost. Such costs can dramatically change the structure of the optimal partitioned contest, even to the extent of preferring the grand contest.
Partitioning costs affect only the contest organizer and do not alter the agents’ best response strategies and the equilibrium in any of the sub-contests (as these are affected only by the number of participating agents and the prizes awarded). Hence equilibrium analysis remains the same as given in Sect. 3. This enables generally characterizing the change in the optimal partition structure due to an increase in the partitioning cost. With small partitioning costs, the preference pattern dictates partitioning to sub-contests of size 2 and 3, as established above. Then, as the partitioning costs increase, the organizer becomes more reluctant to partition the contest, as the partitioning cost outweighs the inherent benefit obtained from partitioning. Finally, when partitioning costs become sufficiently large, the dominating contest structure is the grand contest which includes all agents. This pattern is illustrated in Fig. 2 which depicts the organizer’s expected profit (using the optimal prizes) as a function of her partitioning cost \(c_p\), for the sum (top) and max (bottom) aggregation functions. The setting used is of seven agents (\(k=7\)) with participation cost \(c=0.1\) and uniform quality distribution between 0 and 1. The curves presented correspond to the following partitions: (a) \({\mathcal A}_1\), where the grand contest of all seven agents is used; (b) \(\mathcal {A}_2\), where two sub-contests of two agents and one sub-contest of three agents are used; (c) \(\mathcal {A}_3\), where one sub-contest of four agents and one sub-contest of three agents are used; and (d) \(\mathcal {A}_4\), where one sub-contest of five agents and one sub-contest of two agents are used. From the figure we observe that with sum aggregation function (Fig. 2a) for \(0\le c_p \le 0.18\) the optimal partition is \(\mathcal {A}_2\) (i.e., 2 sub-contests of size 2 and one sub-contest of size 3), for \(0.18< c_p \le 0.22\) it is \(\mathcal {A}_3\) (i.e., one sub-contest of size 4 and one sub-contest of size 3) and for \(c_p>0.22\) it is \(\mathcal {A}_1\) (i.e., the grand contest). With the max aggregation function (Fig. 2b), for \(0\le c_p \le 0.03\) the optimal partition is \(\mathcal {A}_2\), for \(0.03< c_p \le 0.08\) it is \(\mathcal {A}_4\) and for \(c_p>0.08\) it is \(\mathcal {A}_1\).

The organizer’s expected profit as a function of her partitioning cost when using the sum (top) and max (bottom) aggregation functions in the full awareness model. The setting used is: \(k=7\), \(c=0.1\) and f is uniform over [0, 1]. The curves presented are: a \(\mathcal {A}_1=(\{A_1,...,A_7\})\); b \(\mathcal {A}_2=(\{A_1,A_2\},\{A_3,A_4\},\{A_5,A_6,A_7\})\); c \(\mathcal {A}_3=(\{A_1,A_2,A_3,A_4\},\{A_5,A_6,A_7\})\); and d \(\mathcal {A}_4=(\{A_1,A_2,A_3,A_4,A_5\},\{A_6,A_7\})\)
5.2.1 Partitioning big contests
We continue with showing that while partitioning costs may render partitioning inefficient in some cases, this can only happen in “small” contests; once the contest is sufficiently “big”, partitioning is beneficial even with partitioning costs. Here “big” is in two possible ways: the prize amount, M, and the number of agents, k.
Partitioning Contests with Large Prizes. Partitioning contests with sufficiently large prizes is beneficial in the full awareness model both for sum and max aggregation functions as we state in the following Theorem.
Theorem 2
In the full awareness model: For any f, c, there exists an \(\hat{M}\), such that the organizer can benefit from splitting any (sub-)contest with prize \(\ge \hat{M}\). That is, for any partitioned contest \(P=(\mathcal {A},\mathcal {M},f,c,g,c_p)\), if there exists j with \(|D_j|\ge 4\) and \(M_j\ge \hat{M}\) then there exists a partitioned contest \(P'=(\mathcal {A'},{\mathcal M'},f,c,g,c_p)\), wherein \(D_j\) is split into two sub-contests, each of which is of size at least 2 (and all other sub-contests remain unchanged), and \(P'\) yields a higher expected profit than P to the organizer.
(Note that the same \(\hat{M}\) applies for both aggregation functions sum and max.)
Proof
Let \(\hat{M}\) be such that:
Suppose that some \(M_j\ge \hat{M}\). Let \(k_j:=|D_j|\), and for simplicity assume that \(k_j\) is even (the other case is similar). Also suppose that \(k_j\ge 4\). Let \(r_j\) be the threshold used by agents in \(D_j\). By (2), \(F(r_j)=(c/M_j)^{1/(k_j-1)}\). We show that the organizer profits from splitting \(D_j\) into two equal-sized subsets, \(D_j^{(1)}\) and \(D_j^{(2)}\), with an identical prize \(M'=cF(r_j)^{-k_j/2+1}\) to each. By (2), the threshold used by all agents in \(D_j^{(1)}\cup D_j^{(2)}\) remains \(r_j\). The organizer’s expected profit before the split is given in (4) and after the split it is:
(since \(\vec {r}\) did not change). Denote \(q=F(r_j)\). For (10) to be greater than (4), we need to show that
Note that
We have:
establishing (11). The last two steps hold as \(q=F(r_j)\le 1\) and (9) monotonically increases in \(\hat{M}\). \(\square\)
Partitioning Contests with Many Agents. Here we show that partitioning contests with sufficiently many agents is beneficial in the full awareness model, and the aggregation function is sum. That is, for any partitioning costs \(c_p\), there exists \(\hat{k}\) such that if the number of agents is \(\ge \hat{k}\) then partitioning is beneficial.
Technically, as stated, the above claim cannot be true. If \(c_p\) is so large as to be more than any possible profit offered by any contest for any number of agents, then this cost must definitely be avoided, and hence, with such a cost, no partition is advantageous. Accordingly, the theorem excludes this case. Formally:
Theorem 3
In the full awareness model: For any f, c, and partitioning cost \(c_p\),
if
-
there exists some contest \((A,M,f,c,sum,c_p)\) (with some number of agents) that provides the organizer a profit \(> c_p\),
then
-
there exists a \(\hat{k}\) such that in any optimal partitioned contest \((\mathcal {A},\mathcal {M},f,c,sum,c_p)\) the number of agents in any sub-contest is \(\le \hat{k}\).
Proof
For the sum aggregation function, it suffices to prove for the grand contest. Let \(D_0=(\mathcal A_0,\mathcal M_0,f,c,sum,c_p)\) be a contest that gives the organizer a profit \(P_0\ge c_p+\epsilon\), for some \(\epsilon >0\) (if no such contest exists, then there is nothing to prove). Set \(k_0=|A_0|\). Let \(\hat{M}\) be that satisfying equation (9). Let \(r^*\) be such that \(\int _{x=r^*}^{\infty } xf(x)dx < \epsilon /2k_0\) and let \(\hat{k}\) be such that \(\hat{k}>k_0\) and \(F(r^*)\le (c/\hat{M})^{1/(\hat{k}-1)}\).
Consider a contest \(D=(\mathcal A,\mathcal M,f,c,sum,c_p)\) with \(k=|A|\ge \hat{k}\). Let S be the organizer’s profit from the contest. If \(M\ge \hat{M}\), then by Theorem 2 a split is beneficial. If \(M<\hat{M}\), consider the split of the contest into two sub-contests: \(D_1\) - with \(k_0\) agents, and \(D_2\) - with the remaining \((k-k_0)\) agents. The contest \(D_1\) is allocated prize \(M_0\), and \(D_2\) prize M. Contest \(D_1\) is like \(D_0\) and hence yields a profit of \(P_0\). As for \(D_2\), let r be the threshold used by the agents in D. Then,
So, \(r\ge r^*\). The loss in profit in \(D_2\) - with respect to D - is bounded by the expected benefit obtained - in D - from the \(k_0\) agents removed from D, which is bounded by:
The organizer pays \(c_p\) for partitioning the contest. So, in all, her total profit from the new partitioned contest is at least:
So, the partition is beneficial. \(\square\)
With the max aggregation function, however, partitioning the contest is not beneficial when the number of agents is sufficiently large. Consider a contest \((\mathcal A,\mathcal M,f,c,max,c_p)\) with \(c_p>q_{max}\) where \(q_{max}\) is the maximum possible quality that can be obtained. Even if \(|A|\rightarrow \infty\), the benefit of the organizer is bounded, and so it is clearly not worthwhile to split.
5.3 Sub-contest prizes
While the determination of the optimal set of prizes to the partitioned sub-contests \(\mathcal {M}^*\) is beyond the scope of the current paper, we do highlight an important difference in its calculation method depending on the aggregation function used. For the sum aggregation function, the calculation can be made independently for each sub-contest according to the principles provided in the many works cited throughout this paper, as if this was the only contest taking place. Similarly, the optimal prize allocation necessarily allocates identical prizes to sub-contests of identical sizes. These two facts follow directly from the additivity of the aggregation and profit functions.
Interestingly, for the max aggregation function, this is not true; in the optimal partition, even identical sub-contests may be allocated different prizes. This results from the fact that the maximum is calculated over all sub-contests. Hence the expected marginal contribution of each additional sub-contest depends on the structure and prizes of all other sub-contests. For example, consider the case of two 2-agent sub-contests where quality distribution is uniform over [0, 1] and \(c=0.1\). In this case, the optimal prizes turn out to be 0.151 and 0.161 (resulting in thresholds 0.662 and 0.621). The details of optimal prize calculation for such cases is beyond the scope of this paper.
6 Partitionining with unawareness
The case of the sum aggregation function in the unawareness model is simple to analyze and offers a simple rule for the organizer, as given in Proposition 1.
Proposition 1
In the unawareness model, when the aggregation function is sum, the optimal contest structure is to offer a prize \(M=k\cdot c\), resulting in all agents participating.Footnote 9
Proof
Since all agents participate with probability p and the aggregation function is sum, the expected profit of the organizer is:
where E[q] is the expected quality based on f(x) and the second transition results from (6). Therefore whenever \(E[q]>c\), the organizer’s expected profit is maximized when \(p=1\). Substituting \(p=1\) in (6) we obtain that the expected profit maximizing prize is \(M=k\cdot c\). \(\square\)
Since the above holds also for any sub-partition, we conclude that there is no benefit in partitioning whenever using the sum aggregation function in the unawareness model, as the organizer’s expected utility remains the same (offering in each sub-contest of size n a prize of \(n\cdot c\), resulting in having all agents participate). Still, for the max aggregation function, partitioning may turn advantageous under some conditions, as we show in the following paragraphs.
6.1 Costless partitioning
When partitioning entails no costs, we prove that under the max aggregation function, partitioning the contest is a (weakly) dominating strategy. This, compares to the case of full awareness, where for any partitioning cost smaller than some well-defined threshold, partitioning necessarily improves the organizer’s expected profit. The proof uses the same idea of the one given for Theorem 1, showing that we can provide the organizer the same expected profit by partitioning the contest to two sub-contests and offering prizes that guarantee the same participation probability as in the grand contest.
Theorem 4
In the unawareness model, when the aggregation function is max, it is always weakly beneficial to partition any (splittable) (sub-)contest into two sub-contests. That is, for any partitioned contest \(P=(\mathcal {A},\mathcal {M},f,c,g,c_p)\) if there exists j with \(|D_j|\ge 4\) then there exists a partitioned contest \(P'=(\mathcal {A'},\mathcal {M'},f,c,g,c_p)\), wherein the sub-contest \(D_j\) is split into two sub-contests (and all other sub-contests remain unchanged), each of size at least 2, and \(P'\) yields the organizer an expected profit no less than P.
Proof
Let \(\vec {p}\) be the (k-length) sequence of probabilities used by the agents (each according to the probability of its associated sub-contest). The expected profit of the organizer from the entire partitioned contest is given by (8). We now show that with any further partitioning of the contest (to contests of size \(>1\)) the expected profit remains the same. Consider some sub-contest \(C_i\) with prize \(M_i\), and \(k\ge 4\) agents, all using probability \(p_i\). Then, by (6), \(c=M_i\frac{(1-(1-p_i)^{k})}{kp_i}\). Now, split \(C_i\) into two sub-sub-contests, \(C',C''\), of sizes j and \(k-j\), respectively (\(2\le j<k-1\)). Allocate prizes \(M'=c\cdot \frac{jp_i}{1-(1-p_i)^j}\) and \(M''=c\cdot \frac{(k-j)p_i}{1-(1-p_i)^{k-j}}\) to \(C'\) and \(C''\), respectively. Then, again by (6), the probabilities of all agents in \(C'\) and \(C''\) remain \(p_i\) (the cases where all agents participate and when none of the agents participate can be trivially replicated with the same costs). So, \(\vec {p}\) remains the same, and hence the first term of (8) does not change. We prove that the second term (which is subtracted) also remains the same. Indeed,
Hence, the organizer’s expected profit necessarily remains the same by this split. However, maintaining the same agent behavior is not necessarily the optimal split, meaning that other splits may not only keep the organizer’s profit unchanged but also improve it. \(\square\)
While Theorem 4 only establishes that partitioning does not harm the organizer, the following offers an example where partitioning can strictly benefit with the max aggregation function. Consider the case of two 2-agent sub-contests with uniform quality distribution over [0, 1] and \(c=0.1\). In this case, the optimal prizes turn out to be 0.1 and 0.2 (resulting in participation probabilities of 0 and 1). The organizer’s expected profit from the partitioned contest is 0.456 while with the grand contest it is 0.434.
Consequently, corollaries 1 and 2 hold also for the unawareness model, i.e., when there is no partitioning cost, the optimal partitioned contest has sub-contests with 2 or 3 agents and only a linear number of partition structures need to be considered when searching for the optimal partitioned contest.
6.2 Partitioning with partitioning costs
With partitioning costs and max aggregation function we obtain a similar transition from preference of sub-contests of size 2 and 3 when costs are relatively small, to bigger sub-contests as costs increase, and finally the preference of the grand contest, as characterized in Sect. 5.2.
While in the former section we proved that regardless of the aggregation function used (sum or max), when using the sum aggregation function this property does not hold in the unawareness model according to Proposition 1. Providing a similar characterization for the case of the max aggregation function is more complicated, hence we leave this for future work.
Similarly, we found in the former section that regardless of the aggregation function used (sum or max), in the full awareness model, partitioning is always beneficial given sufficient amount of agents in the contest. That property does not necessarily hold when in the unawareness model—according to Proposition 1, when using the sum aggregation function there is no preference for partitioning. Also, similar to the case of fully aware agents, when using the max aggregation function the preference of partitioning cannot be guaranteed with unaware agents even with an infinite number of agents, as the benefit of the organizer is bounded.
7 Heterogeneous participation costs and quality distributions
While the agents in our model differ in their contribution costs, they may be considered a priori homogeneous in the sense that their contribution qualities derive from a common probability distribution function and they all incur a similar cost if choosing to participate in the contest. This assumption is quite common in binary contest literature [26, 33, 43, 59]. Still, the model can be trivially augmented to accommodate settings where agents are associated with different participation costs and/or their contribution qualities derive from different probability distribution functions. This maps to settings where, for example, agents value their time differently, or when they arrive from different locations hence their cost of travel and accommodation is different. Similarly, differences in the underlying contribution quality functions may hold when agents are a priori very different in their competence characteristics.
Equilibrium Analysis. The changes in the equilibrium analysis when switching to fully heterogeneous agents are minor and quite technical. Denote the underlying quality probability distribution function and the participation cost of each agent \(A_i\) by \(f_i(q)\) and \(c_i\), respectively. We begin with the full awareness model. Here, even two agents belonging to the same sub-contest will be using a (potentially) different participation threshold. Denote the participation threshold of agent \(A_i\) by \(r_i\). Given the strategy profile of all other agents \(\{r_j | A_{j\ne i} \in A\}\), the expected profit of agent \(A_i\) if participating given its quality \(q_i\), now denoted \(B_i^P(q_i)\), is given by the following modification of (1):
If not participating, \(A_i\) gains zero. Since \(B_i^P(q_i)\) is monotonically increasing in \(q_i\), the best-response threshold \(r_i\) of any agent \(A_i\) can be derived from the following modification of (2):
For calculating the equilibrium thresholds, one has to solve the set of equations of the above type, one for each agent in A.
Similarly, for the unawareness model, given the strategy profile of all other agents \(\{p_j | A_{j\ne i} \in A\}\), the expected profit of agent \(A_i\) if participating (given in (5)), becomes:
If not participating, \(A_i\) gains zero. The BNE solution should therefore satisfy for every agent \(A_i\in A\): (a) \(B_i^P< 0\) if \(p_i=0\); (b) \(B_i^P> 0\) if \(p_i=1\); and (c) \(B_i^P=0\) if \(0<p_i<1\). The solution \(\{p_1,...,p_k\}\) is extracted by solving a set of equations of the above type (one for each agent).
Optimal Partition. Given the equilibrium strategies of the agents in their sub-contests (\(r_1,...,r_k\) or \(p_1,...,p_k\)), the organizer’s expected profit from k-agent contest, for the cases of full awareness and unawareness, respectively, is:
and
(equivalent to (4) and (8), respectively).
As we show in the two following numerical examples, partitioning by itself is still highly efficient in many heterogeneous settings, however the general dominating structure is case-based (and in some cases the grand contest is preferred).
The first example considers the case of the sum aggregation function in the full awareness model. The setting includes four agents (\(k=4\)), where the participation costs are \(c_1=0.1\), \(c_2=0.2\), \(c_3=0.3\) and \(c_4\)’s value varies. The qualities distribution function of all agents is similar—uniform between 0 and 1. Figure 3 depicts the organizer’s expected profit (using the optimal partition and associated prizes), as a function of the participation cost \(c_4\). From the figure we observe that even slight changes in the problem setting (the participation cost of one agent in this case) result in changes in the nature of the expected-profit-maximizing partition. Here, for \(0\le c_4 \le 0.15\) and \(c_4\ge 0.37\) the optimal partition is \(\mathcal {A}_1=(\{A_1,A_4\},\{A_2,A_3\})\), for \(0.16 \le c_4 \le 0.24\) it is \(\mathcal {A}_2=(\{A_1,A_3\},\{A_2,A_4\})\) and for \(0.25 \le c_4 \le 0.35\) it is \({\mathcal A}_3=(\{A_1,A_2\},\{A_3,A_4\})\). Furthermore, as evidenced from the figure, the change in \(A_4\)’s participation cost does not only influence the optimal number and size of sub-contests but also the identity of the agents constituting each sub-contest. For example, both in \(\mathcal {A}_1\) and \(\mathcal {A}_3\), the optimal partition dictates two sub-contests of two agents each, yet \(A_4\) is assigned to a sub-contest with a different agent.

The organizer’s expected profit as a function of the participation cost of \(A_4\) when choosing the optimal partition, using the sum aggregation function in the full awareness model. The setting used is: \(k=4\), \(c_1=0.1\), \(c_2=0.2\), \(c_3=0.3\) and and f is uniform over [0, 1]. The optimal partitions are: a \(\mathcal {A}_1=(\{A_1,A_4\},\{A_2,A_3\})\); b \({\mathcal A}_2=(\{A_1,A_3\},\{A_2,A_4\})\); and c \({\mathcal A}_3=(\{A_1,A_2\},\{A_3,A_4\})\)
Note that although the optimal partition in Fig. 3 is to several sub-contests, for any \(c_4\) value, in other settings it is possible that the grand contest is the expected-profit-maximizing structure. Figure 4 depicts the organizer’s expected profit as a function of the participation cost \(c_4\), whenever using the optimal partition and associated prizes. The setting used is the same as in Fig. 3 except to the participation costs which are \(c_1=0.51\), \(c_2=0.61\), \(c_3=0.71\) and \(c_4\)’s value varies. Here, for \(0\le c_4 \le 0.45\) and \(c_4\ge 0.54\) the optimal partition is \({\mathcal A}_1=(\{A_1,A_2\},\{A_3,A_4\})\) and for \(0.46 \le c_4 \le 0.53\) it is \(\mathcal {A}_2=(\{A_1,A_2,A_3,A_4\})\) (i.e., grand contest).

The organizer’s expected profit as a function of the participation cost of \(A_4\) when choosing the optimal partition (each of size at least 2), using the sum aggregation function in the full awareness model. The setting used is: \(k=4\), \(c_1=0.15\), \(c_2=0.61\), \(c_3=0.71\) and and f is uniform over [0, 1]. The curves presented are: a \({\mathcal A}_1=(\{A_1,A_2\},\{A_3,A_4\})\); and b \({\mathcal A}_2=(\{A_1,A_2,A_3,A_4\})\)
The above phenomenon according to which partitioning is not beneficial even in the absence of partitioning costs holds also in the unawareness model. Consider for example, a setting with four agents (\(k=4\)) and costs \(c_1=0\) (“strong agent”) and \(c_2=c_3=c_4=0.5\) (“weak agents”) and using max aggregation function. For simplicity we use discrete quality valuesFootnote 10: the quality of the strong agent is either 0 or \(10-\epsilon\) (\(\epsilon \rightarrow 0\)) with equal probability, and the quality of any of the weak agents is either 0 or 10 with equal probability. Here, for \(\mathcal {A}_1=\{\{A_1,A_2,A_3,A_4\}\}\) (i.e., grand contest) the organizer’s expected-profit-maximizing awarded prize is 1.627, resulting in expected profit 7.748. When partitioning the contest to two 2-agent sub-contests (\({\mathcal A}_2=\{\{A_1,A_2\},\{A_3,A_4\}\}\)), however, the optimal prizes are 0.8 and 1 and the organizer’s expected profit is 7.575.
Since partitioning is not necessarily the dominating strategy when the agents differ in their participation costs and underlying distribution of qualities, one needs to evaluate all possible partitions. The problem of extracting the optimal partition is thus complicated by the combinatorial nature of the number of sub-contests that need to be reviewed. This computational challenge is common in the contest design literature [9, 35]. Indeed, the only binary contest settings to which prior work suggests closed form solutions and manage to prove general dominance relations, are those considering a priori homogeneous agents, whereas results relating to heterogeneous agents in this area are of existential nature.
8 Contest partitioning versus hiring (single agent sub-contests)
Up until now we assumed that the contest partitioning process results in sub-contests of size 2 and above. We now extend the discussion to the case where sub-contests of size 1 (singletons) may be considered. When using a sub-contest of size 1, agent participation can be induced by offering a prize \(M=c\) (which, from the organizer’s point of view, dominates any other prize \(M'>c\)). Similarly, offering a prize \(M'<c\) guarantees the non-participation of the agent. This is equivalent to hiring the agent, offering it exactly (or marginally higher than) its participation cost. The use of such singletons provides the organizer a better control over which of the agents will participate, as the actions of the singleton agents are driven by the direct payments they receive rather than competition dynamics. Yet, when doing so, the organizer loses the main advantage of the contest mechanism as a means for eliciting agents’ private information. In our case, it is the competition dynamics that keep those agents with low contribution qualities (which the organizer cannot identify a priori) from participating in the contest, hence the prize offered becomes more effective in eliciting the participation of agents associated with high contribution qualities.Footnote 11
Still, the use of singletons may become beneficial in various settings, as we illustrate in the following paragraphs. Figure 5 depicts the organizer’s expected profit (using the optimal prizes) as a function of her partitioning cost \(c_p\) (which applies also when one of the sub-contests is a singleton), for the sum aggregation function in the full awareness model. The setting includes four agents (\(k=4\)), participation cost \(c=0.1\) and uniform quality distribution between 0 and 1. The curves presented correspond to the following partitions: (a) \(\mathcal {A}_1\), where the grand contest of all four agents is used; (b) \(\mathcal {A}_2\), where two 2-agents sub-contests are used; (c) \(\mathcal {A}_3\), where one sub-contest of one agent and one sub-contest of three agents are used; (d) \(\mathcal {A}_4\), where two sub-contests of one agent and one sub-contest of two agents are used; and (e) \(\mathcal {A}_5\), where four single agent contests are used. From the figure we observe that for \(0\le c_p \le 0.16\) the optimal partition is to 4 sub-contests of size 1.

The organizer’s expected profit as a function of her partitioning cost when using the sum aggregation function in the full awareness model. The setting used is: \(k=4\), \(c=0.1\) and f is uniform over [0, 1]. The curves presented are: a \(\mathcal {A}_1=(\{A_1,A_2,A_3,A_4\})\); b \({\mathcal A}_2=(\{A_1,A_2\},\{A_3,A_4\})\); c \({\mathcal A}_3=(\{A_1\},\{A_2,A_3,A_4\})\); d \({\mathcal A}_4=(\{A_1\},\{A_2\},\{A_3,A_4\})\) and e \({\mathcal A}_5=(\{A_1\},\{A_2\},\{A_3\},\{A_4\})\)
The use of contest partitioning in the form of partitioning into all-singleton type sub-contests, becomes particularly beneficial in the unawareness model. Here, in the absence of partitioning costs, the optimal partition is into singletons, i.e., where each agent \(A_i\) is assigned to a contest of size 1 and the prize of each contest is c—a reward that guarantees participation – or zero - to prevent participation. This is established in the following Proposition.
Proposition 2
In the unawareness model with no partitioning cost, for any contest \(C=(A,M,f,c,g)\), there exists a \(\hat{k}\) such that there exists an optimal partitioned contest P wherein
-
each sub-contest consists of a single agent, and
-
\(M_i=c\) for exactly \(\hat{k}\) such single-agent contests, and \(M_i=0\) for the other.
Proof
Let \(P'=(\mathcal {A}',\mathcal {M}',f,c,g,0)\) be an optimal partitioned contest for the setting that does not comply with the above form. We show that \(P'\) can be converted to a partitioned contest of the form as in the proposition and is weakly dominated by such.
The conversion is performed in two steps. First, we convert \(P'\) into \(P''\) wherein each agent is placed in a separate sub-contest. The prizes for each such sub-contest are set probabilistically, as defined shorty. Then, in the second step, the prizes are set deterministically, as in the proposition.
Let \(\vec {p}=(p_1,...,p_k)\) be the equilibrium strategy probabilities used by the agents in \(P'\). For any agent \(A_i\), let \(E_i\) be the expected prize amount it receives when it participates (assuming the other agents play by \(\vec {p}\)). Then, \(E_i\ge c\) (or else \(A_i\) would not participate). So, the organizer’s expected expenditure on \(A_i\) is \(p_iE_i\ge p_i c\). On the other hand, the organizer can directly induce \(A_i\) to participate with probability exactly \(p_i\), by placing \(A_i\) in a separate sub-contest, on its own, setting its prize (a priori) to c with probability \(p_i\), and 0 otherwise. Obviously, the agent will participate only when the prize turns to be c, i.e., with probability \(p_i\). Accordingly, let \(P''\) be a partitioned contest wherein each agent \(A_i\) is placed in a separate contest, where the prize \(M_i=c\) with probability \(p_i\) and \(M_i=0\), otherwise. The agents’ strategies in \(P'\) and \(P''\) are identical. So, the organizer’s expected utility is identical. On the other hand, the organizer’s expected expenditure is \(\sum _{i=1}^k p_i c_i\le \sum _{i=1}^k p_i E_i\). So, the organizer’s expected profit in \(P''\) is no less than that in \(P'\).
Let S be the expected profit of \(P''\). The partitioned contest \(P''\) allocates prizes to the singleton sub-contests probabilistically. Each specific deterministic outcome, \(\omega\), of the random process, assigns a prize c to some of the singletons and 0 to the others. S is the expected profit across all possible such deterministic choices. Thus, at least one of them achieves a profit \(\ge S\). Replacing the probabilistic assignments with this latter deterministic choice results in an expected profit at least S. \(\square\)
With the proposed partition and associated prizes, the organizer obtains full control over which agents participate and does not incur any further cost beyond the unavoidable participation costs of those participating. The solution in this case is equivalent to solving a multi-agent problem of maximizing aggregated profit where agents are fully cooperative, which (weakly) dominates the case where the agents are self-interested.
Notice that for optimal contest structure (i.e., when offering the optimal prize) and when the aggregation function is sum, the strategy probability \(0<p<1\) is not optimal, as proved in Proposition 1. Therefore, when agents are unaware of their qualities and when the aggregation function is sum, the optimal contest results in having all agents participate.
As for the full awareness model, here an all-singletons solution is not always the preferred one, even with costless partitioning. As an example, consider the setting of four agents (\(k=4\)) with participation cost \(c=0.1\) and uniform quality distribution over [0, 1], using the max aggregation function and optimal prizes. Here, when \(c_p=0\), for \({\mathcal A}_2=(\{A_1,A_2\},\{A_3,A_4\})\) the organizer’s expected profit is 0.529 which dominates any other partition, including \({\mathcal A}_5=(\{A_1\},\{A_2\},\{A_3\},\{A_4\})\) (for which the organizer’s expected profit is 0.4). Similarly, using the sum aggregation function, with \(k=4\), \(c=0.7\), uniform quality distribution over [0, 1] and optimal prizes, when \(c_p=0\) the optimal partitioning is to two sub-contests of size 2 (for which the organizer’s expected profit is 0.098).
9 Discussion and conclusions
The paper suggests the use of sub-contests as a means for improving a contest organizer’s expected profit in binary contest model – a well established model in contests’ literature. We established that contest partitioning may indeed improve the organizer’s expected profit, specifically for sufficiently large prizes and large contests, depending on the model variant and the aggregation function in use. Furthermore, we have shown that the optimal partitioning is primarily influenced by the partitioning cost and that in the absence of such cost, breaking a contest into sub-contests is either dominating or weakly dominating keeping the grand-contest structure, depending on the agents’ a priori knowledge regarding their contribution quality. Finally, we have shown that in some settings an even better solution can be obtained when allowing singletons as part of the partitioning, which is equivalent to directly hiring some of the participants instead of including them in a contest.
We believe that the use of contest partitioning is simple and applicable to many real-life contests. In some cases, contest partitioning may require some additional overhead associated with running several events rather than one, but these costs are incorporated into the analysis. It is worth noting that in many settings contest partitioning may also offer advantages that go beyond the direct improvement in the organizer’s profit, e.g., running several sub-contests in different cities can save prospective contestants the need to travel to a central location, hence reducing their participation cost. To the best of our knowledge, we are the first to investigate the idea of contest partitioning in binary contests, which is inherently different from other tangential designs such as running contests as a multi-stage contest or splitting prizes within a contest.
We note that the benefit in contest partitioning, as we show in our work (e.g., Theorem 1), is unique to binary contests, and results found in effort-based contests literature do not necessarily apply to our model. As mentioned in Sect. 2, prior work dealing with contest partitioning has considered the problem in the context of effort-based (as opposed to binary) contests with probabilistic winner-determination mechanism [9, 18, 19]. A generalized Tullock contestFootnote 12 includes k contestants, wherein their costs of exerting effort are heterogeneous and a priori uncertain. Here, the organizer offers a prize M and each contestant \(A_i\) chooses the effort level \(e_i\) to be exerted, which is a non-negative real number of its choice. Given the set \(e=(e_1,\ldots ,e_k)\) of efforts exerted by the agents, the probability of agent \(A_i\) winning the prize is given by: \(p_i(e) = {e_i}/{\sum _{j=1}^k e_j}\).Footnote 13 The organizer’s profit is \(\sum e_i - M\), i.e., the sum of efforts exerted minus the prize spending, and each agent \(A_i\)’s profit is \(Mp_i(e)-c_i(e_i)\), i.e., the expected prize winning minus the cost of the effort exerted (where \(c_i(e_i)\) is \(A_i\)’s cost of exerting effort \(e_i\)). The goal of the organizer and each of the agents is to maximize the expected individual profit. The main finding in prior work dealing with contest partitioning in Tullock contests is that partitioning itself (i.e., ignoring partitioning cost) is not necessarily beneficial. Indeed, this prior work has taken the sum of prizes as given and fixed (while in our work we do not limit the expected sum of awarded prizes in the partitioned sub-contests). This means that we cannot preclude the dominance of contest partitioning should we allow the use of non-constrained optimal prizes in such contest models. As we exemplify here, even when using the optimal prize for each sub-contest, partitioning itself (i.e., excluding partitioning costs) is not necessarily beneficial in such effort-based models. Consider an instance of the above Tullock contest with four agents, each associated with one out of two possible cost functions: \(c^1(e)=0.1e^2\) and \(c^2(e)=0.9e^2\). Assume that each agent has an equal chance of being associated with each of the two cost functions. Also assume that while each agent knows its own cost function it (and similarly the organizer) cannot distinguish the cost function of the other agents. Here the best-response strategy of each of the agents can be derived using first order conditions. Consequently, we find that when using the grand contest, the Nash Equilibrium solution is such that the organizer offers a prize \(M^*=1.7\) and the agents exert effort \(e=1.38\) and \(e=0.319\) when associated with a cost function \(c^1(e)\) and \(c^2(e)\), respectively. The organizer’s expected profit in this case is 1.7. With two sub-contests of two agents, the equilibrium is such that the organizer offers a prize \(M^*=0.5\) in each sub-contest and the agents exert effort \(e=0.739\) and \(e=0.246\) when associated with a cost function \(c^1(e)\) and \(c^2(e)\), respectively. The organizer’s expected profit in this case is 0.972. Meaning that partitioning the four-agent contest into two sub-contests, even if offering the optimal (expected-profit-maximizing) prize in each, actually decreases the organizer’s expected profit.
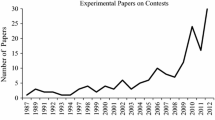
We see several directions for future work. We plan to investigate the effect of contest partitioning over the social welfare and contestants’ welfare, emphasizing fairness and price of anarchy aspects. While in our model the organizer is not limited by a budget but rather optimizes (taking the prizes as a non-constrained parameter) in order to maximize her expected net profit, upper bounding the overall sum of prizes needed is also an interesting question for future work. Another possible direction includes the use of several prizes within each sub-contest and the development of efficient means for optimal partition (and prizes) calculation for different contest model variants. Last, a particularly interesting direction for future work is to complement the theoretical analysis by experiments with people. This direction is in particular interesting since with human participants the performance to be obtained with contests is likely to be different from the theoretical expectations, as people are known to be bounded rational [36, 74]. One common finding in experimental research on individual behavior in contests is that people tend to exert more effort in contests compared to the theoretical equilibrium-based predictions, leading to better expected contributions overall [43, 65]. This phenomenon is explained primarily by people’s non-monetary utility from winning in a contest [60, 66] along with a plethora of secondary explanations such as mistakes and systematic biases [10, 68], lack of experience in contests [64] and caring about relative payoffs maximization [55]. In light of showing that contest partitioning is highly beneficial in theory, it would be interesting to empirically investigate this idea in real contests.
Data availability
The data (i.e., Matlab code) used for the numerical illustration during the current study is available from the corresponding author on reasonable request.
Notes
Recently, contests have been employed in the fight against the Covid-19 pandemic (e.g., the Rapid Covid Testing XPRIZE).
For example, in 2013, the Pentagon launched a contest through a web portal called Vehicleforge.mil, for the design of an amphibious vehicle for the U.S. Marines. It was composed of two sub-contests: the first sub-contest, with a 1 million dollar prize, involved mobility and drive-train subsystems for the vehicle, while the second 1 million dollar prize sub-contest involved the design of the chassis and other subsystems [35].
Chowdhury and Kim [9] assume there exists a limit on the number of contests, potentially due to operational costs for running these contests, though do not use any explicit partitioning cost.
Moldavonu and Sela [56] also consider splitting the agents into sub-contests, but in a tournament structure, where the winners compete with each other. They provide the optimal contest architecture for different contestants’ cost functions (linear, concave, convex) and organizer’s goal (maximization of the expected total/highest effort).
We note that a moving to heterogeneous setting in which agents also differ in their participation cost and/or quality distribution is primarily technical and does not add much to the theoretical analysis. We discuss this case in Sect. 7.
In general, the partitioning cost may be a function of the contest size. In this work, we consider the basic case where the cost is constant, but many of the results can be extended to more elaborate cost structures.
The uniqueness of this point derives from the fact that \(B^P(q_i)\) strictly increases in \(q_i\).
In case (c) there are also pure-strategies equilibria where only a subset of the agents participate, yet these are less natural and fair as mentioned before.
Assuming the expected quality contribution from a participation agent is greater than its participation cost. Otherwise it is best to have none of the agents participate.
For the discrete case we replace the probability distribution function f(x) by the discrete probability \(p_i(x)\) in (15) and sum over the possible quality contributions rather than integrate. Alternatively, we can model approximate the discrete case by considering probability masses around the discrete values and insignificant masses in-between.
This relates primarily to the full awareness model.
For completeness, if \(\sum e_j=0\) then \(p_i(e) = 0\).
References
Archak, N., & Sundararajan, A. (2009). Optimal design of crowdsourcing contests. In ICIS 2009 proceedings (p. 200).
Azmat, G., & Möller, M. (2009). Competition among contests. The RAND Journal of Economics, 40, 743–768.
Baik, K. H. (1994). Effort levels in contests with two asymmetric players. Southern Economic Journal, 61, 367–378.
Bimpikis, K., Ehsani, S., & Mostagir, M. (2019). Designing dynamic contests. Operations Research, 67, 339–356.
Büyükboyaci, M. (2016). A designer’s choice between single-prize and parallel tournaments. Economic Inquiry, 54, 1774–1789.
Cavallo, R., & Jain, S. (2012). Efficient crowdsourcing contests. In Proceedings of the international conference on autonomous agents and multiagent systems (AAMAS) (pp. 677–686). Citeseer.
Cavallo, R., & Jain, S. (2013). Winner-take-all crowdsourcing contests with stochastic production. In Proceedings of the first AAAI conference on human computation and crowdsourcing (HCOMP) (pp. 34–41).
Chawla, S., Hartline, J. D., & Sivan, B. (2019). Optimal crowdsourcing contests. Games and Economic Behavior, 113, 80–96.
Chowdhury, S. M., & Kim, S.-H. (2017). “Small, yet beautiful’’: Reconsidering the optimal design of multi-winner contests. Games and Economic Behavior, 104, 486–493.
Chowdhury, S. M., Sheremeta, R. M., & Turocy, T. L. (2014). Overbidding and overspreading in rent-seeking experiments: Cost structure and prize allocation rules. Games and Economic Behavior, 87, 224–238. https://doi.org/10.1016/j.geb.2014.05.004
Corchon, L. C. (2007). The theory of contests: A survey. Review of Economic Design, 11, 69–100.
Corchón, L. C., Serena, M., et al. (2018). Contest theory. Handbook of Game Theory and Industrial Organization, 2, 125–146.
Dasgupta, A., & Nti, K. O. (1998). Designing an optimal contest. European Journal of Political Economy, 14, 587–603.
Dechenaux, E., Kovenock, D., & Sheremeta, R. (2015). A survey of experimental research on contests, all-pay auctions and tournaments. Experimental Economics, 18, 609–669.
DiPalantino, D., & Vojnovic, M. (2009). Crowdsourcing and all-pay auctions. In Proceedings of the 10th ACM conference on electronic commerce (ACM-EC) (pp. 119–128).
Dubey, P. (2013). The role of information in contests. Economics Letters, 120, 160–163.
Dütting, P., Feng, Z., Narasimhan, H., Parkes, D. C., & Ravindranath, S. S. (2023). Optimal auctions through deep learning: Advances in differentiable economics. Journal of the ACM.
Epstein, G. S., Nitzan, S., & Schwarz, M. E. (2008). Performance and prize decomposition in contests. Public Choice, 134, 429–443.
Fu, Q., & Lu, J. (2009). The beauty of “bigness’’: On optimal design of multi-winner contests. Games and Economic Behavior, 66, 146–161.
Fu, Q., & Lu, J. (2010). Contest design and optimal endogenous entry. Economic Inquiry, 48, 80–88.
Fu, Q., & Lu, J. (2012). The optimal multi-stage contest. Economic Theory, 51, 351–382.
Gallice, A. (2017). An approximate solution to rent-seeking contests with private information. European Journal of Operational Research, 256, 673–684.
Gao, X. A., Bachrach, Y., Key, P., & Graepel, T. (2012). Quality expectation-variance tradeoffs in crowdsourcing contests. In Proceedings of the twenty-sixth AAAI conference on artificial intelligence (pp. 38–44).
Gemp, I., Anthony, T., Kramar, J., Eccles, T., Tacchetti, A., & Bachrach, Y. (2022). Designing all-pay auctions using deep learning and multi-agent simulation. Scientific Reports, 12, 16937.
Ghosh, A. (2023). Contests and other topics in multi-agent systems. In Proceedings of the 2023 international conference on autonomous agents and multiagent systems (AAMAS) (pp. 3014–3016).
Ghosh, A., & Kleinberg, R. (2016). Optimal contest design for simple agents. ACM Transactions on Economic and Computation, 4, 22:1-22:41.
Goktas, D., Parkes, D. C., Gemp, I., Marris, L., Piliouras, G., Elie, R., Lever, G., & Tacchetti, A. (2023). Generative adversarial equilibrium solvers. arXiv preprint arXiv:2302.06607
Goltsman, M., & Mukherjee, A. (2011). Interim performance feedback in multistage tournaments: The optimality of partial disclosure. Journal of Labor Economics, 29, 229–265.
Gradstein, M., & Konrad, K. A. (1999). Orchestrating rent seeking contests. Economic Journal, 109, 536–545.
Gurtler, O., Munster, J., & Nieken, P. (2013). Information policy in tournaments with sabotage. The Scandinavian Journal of Economics, 115, 932–966.
Habani, M., Levy, P., & Sarne, D. (2019). Contest manipulation for improved performance. In Proceedings of the 18th international conference on autonomous agents and multiagent systems (AAMAS) (pp. 2000–2002).
Hafalir, I. E., Hakimov, R., Kübler, D., & Kurino, M. (2018). College admissions with entrance exams: Centralized versus decentralized. Journal of Economic Theory, 176, 886–934.
Haggiag, C., Oren, S., & Segev, E. (2022). Picking the right winner: Why tie-breaking in crowdsourcing contests matters. In IJCAI-international joint conferences on artificial intelligence organization (pp. 307–313).
Halac, M., Kartik, N., & Liu, Q. (2017). Contests for experimentation. Journal of Political Economy, 125, 1523–1569.
Hu, M., & Wang, L. (2021). Joint versus separate crowdsourcing contests. Management Science, 67, 2711–2728.
Kahneman, D. (2000). A psychological point of view: Violations of rational rules as a diagnostic of mental processes. Behavioral and Brain Sciences, 23, 681–683.
Kaplan, T. R., & Wettstein, D. (2015). The optimal design of rewards in contests. Review of Economic Design, 19, 327–339.
Konrad, K. A., & Kovenock, D. (2009). Multi-battle contests. Games and Economic Behavior, 66, 256–274.
Krähmer, D. (2007). Equilibrium learning in simple contests. Games and Economic Behavior, 59, 105–131.
Körpeoğlu, E., Korpeoglu, C. G., & Hafalir, I. E. (2018). Parallel innovation contests. Working Paper.
Lev, O., Polukarov, M., Bachrach, Y., & Rosenschein, J. S. (2013). Mergers and collusion in all-pay auctions and crowdsourcing contests. In Proceedings of the international conference on autonomous agents and multiagent systems (AAMAS) (pp. 675–682).
Levy, P. (2018). Optimal contest design for multi-agent systems. In Proceedings of the 2018 AAAI/ACM conference on AI, ethics, and society (pp. 376–377).
Levy, P., & Sarne, D. (2018). Understanding over participation in simple contests. In Proceedings of the AAAI conference on artificial intelligence (pp. 1571–1578).
Levy, P., Sarne, D., & Aumann, Y. (2018). Tractable (simple) contests. In Proceedings of international joint conference on artificial intelligence (IJCAI) (pp. 361–367).
Levy, P., Sarne, D., & Aumann, Y. (2019a). Selective information disclosure in contests. In Proceedings of the 18th international conference on autonomous agents and multiagent systems (AAMAS) (pp. 2093–2095).
Levy, P., Sarne, D., & Aumann, Y. (2019b). Temporal information design in contests. In Proceedings of international joint conference on artificial intelligence (IJCAI) (pp. 428–434).
Levy, P., Sarne, D., & Aumann, Y. (2023). Tractable binary contests. ACM Transactions on Economics and Computation.
Levy, P., Sarne, D., & Habani, M. (2020). Simple contest enhancers. In 2020 IEEE/WIC/ACM international joint conference on web intelligence and intelligent agent technology (WI-IAT) (pp. 463–469). IEEE.
Levy, P., Sarne, D., & Rochlin, I. (2017). Contest design with uncertain performance and costly participation. In Proceedings of international joint conference on artificial intelligence (IJCAI) (pp. 302–309).
Liu, T. X., Yang, J., Adamic, L. A., & Chen, Y. (2014). Crowdsourcing with all-pay auctions: A field experiment on taskcn. Management Science, 60, 2020–2037.
Liu, X., & Lu, J. (2014). The effort-maximizing contest with heterogeneous prizes. Economics Letters, 125, 422–425.
Luo, T., Das, S. K., Tan, H. P., & Xia, L. (2016). Incentive mechanism design for crowdsourcing: An all-pay auction approach. ACM Transactions on Intelligent Systems and Technolgy, 7, 35:1-35:26.
Luo, T., Kanhere, S. S., Tan, H., Wu, F., & Wu, H. (2015). Crowdsourcing with tullock contests: A new perspective. In Proceedings of IEEE conference on computer communications (INFOCOM) (pp. 2515–2523).
Luo, Y. (2023). Incentivizing sequential crowdsourcing systems. In Proceedings of the 2023 international conference on autonomous agents and multiagent systems (AAMAS) (pp. 2697–2699).
Mago, S. D., Samak, A. C., & Sheremeta, R. M. (2016). Facing your opponents. Journal of Conflict Resolution, 60, 459–481.
Moldovanu, B., & Sela, A. (2001). The optimal allocation of prizes in contests. American Economic Review, 91, 542–558.
Moldovanu, B., & Sela, A. (2006). Contest architecture. Journal of Economic Theory, 126, 70–96.
Olszewski, W., & Siegel, R. (2020). Performance-maximizing large contests. Theoretical Economics, 15, 57–88.
Sarne, D., & Lepioshkin, M. (2017). Effective prize structure for simple crowdsourcing contests with participation costs. In Proceedings of the fifth AAAI conference on human computation and crowdsourcing (HCOMP) (pp. 167–176).
Schmitt, P., Shupp, R., Swope, K., & Cadigan, J. (2004). Multi-period rent-seeking contests with carryover: Theory and experimental evidence. Economics of Governance, 5, 187–211.
Schweinzer, P., & Segev, E. (2012). The optimal prize structure of symmetric tullock contests. Public Choice, 153, 69–82.
Segev, E. (2020). Crowdsourcing contests. European Journal of Operational Research, 281, 241–255.
Segev, E., & Sela, A. (2014). Multi-stage sequential all-pay auctions. European Economic Review, 70, 371–382.
Sheremeta, R. (2011). Contest design: An experimental investigation. Economic Inquiry, 49, 573–590.
Sheremeta, R. (2013). Overbidding and heterogeneous behavior in contest experiments. Journal of Economic Surveys, 27, 491–514.
Sheremeta, R. M. (2010). Experimental comparison of multi-stage and one-stage contests. Games and Economic Behavior, 68, 731–747.
Shi, Q., & Hao, D. (2022). Social sourcing: Incorporating social networks into crowdsourcing contest design. IEEE/ACM Transactions on Networking.
Shupp, R., Sheremeta, R. M., Schmidt, D., & Walker, J. (2013). Resource allocation contests: Experimental evidence. Journal of Economic Psychology, 39, 257–267.
Simon, N., Levy, P., & Sarne, D. (2022). Obtaining and providing partial information in binary contests. In 2022 IEEE/WIC/ACM international joint conference on web intelligence and intelligent agent technology (WI-IAT) (pp. 191–198). IEEE.
Stracke, R. (2013). Contest design and heterogeneity. Economics Letters, 121, 4–7.
Tacchetti, A., Strouse, D., Garnelo, M., Graepel, T., & Bachrach, Y. (2019). A neural architecture for designing truthful and efficient auctions (Vol. 3, p. 4). arXiv preprint arXiv:1907.05181
Vojnovic, M. (2016). Contest theory: Incentive mechanisms and ranking methods. Cambridge University Press.
Xu, H., & Larson, K. (2014). Improving the efficiency of crowdsourcing contests. In Proceedings of the 2014 international conference on autonomous agents and multi-agent aystems (AAMAS) (pp. 461–468).
Zhang, Y., Bellamy, R. K., & Kellogg, W. A. (2015). Designing information for remediating cognitive biases in decision-making. In Proceedings of CHI (CHI ’15, pp. 2211–2220).
Funding
Open access funding provided by Bar-Ilan University. No funding was received for this study.
Author information
Authors and Affiliations
Contributions
All authors contributed equally to this work.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Levy, P., Aumann, Y. & Sarne, D. Contest partitioning in binary contests. Auton Agent Multi-Agent Syst 38, 7 (2024). https://doi.org/10.1007/s10458-024-09637-w
Accepted:
Published:
DOI: https://doi.org/10.1007/s10458-024-09637-w