
Abstract
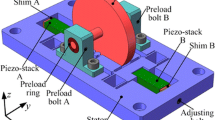
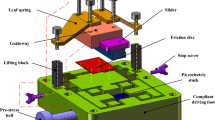
This study proposes a piezoelectric rotary actuator based on compliant foot driving. With the help of driving modules which are composed of four compliant feet and four piezo-stacks, the designed actuator can produce large range rotary motions in both forward and backward directions with a high resolution. The mechanical structure and the moving principle are presented. Pseudo-rigid-body model is used to simulate the path of the compliant foot end and the movement model of the driving module is established to analyze the motion of the actuator. The influence of the preload force on performance of the actuator is discussed. To investigate the working performance, a prototype is fabricated and a set of experimental system is established. The experimental results indicate that the angular displacement outputs under various driving voltages and frequencies show good linear relationships with the time. The driving resolution and the maximum output force are 0.24 µrad and 158 N, respectively. The angular displacements deviation between the forward and backward motions within 50 steps is 376.4 μrad and the actuator can achieve various angular velocities by changing the driving voltage and frequency.
















Similar content being viewed by others

References
Cherepanov V, Coenen P, Voigtländer B (2012) A nanopositioner for scanning probe microscopy: the KoalaDrive. Rev Sci Instrum 83(2):023703
Chu CL, Fan SH (2006) A novel long-travel piezoelectric-driven linear nanopositioning stage. Precis Eng 30(1):85–95
Erismis MA, Neves HP, Puers R et al (2009) Saw-tooth vernier ratchets for electrostatic inchworm actuators. Sens Actuators A 156(1):66–71
Fleming AJ, Leang KK (2014) Design, modeling and control of nanopositioning systems. Springer, Berlin
Howell LL (2001) Compliant mechanisms. Wiley, Hoboken
Howell LL, Magleby SP, Olsen BM (2013) Handbook of compliant mechanisms. Wiley, Hoboken
Jang LS, Yu YC (2008) Peristaltic micropump system with piezoelectric actuators. Microsyst Technol 14(2):241–248
Li J, Zhou X, Zhao H et al (2015a) Design and experimental tests of a dual-servo piezoelectric nanopositioning stage for rotary motion. Rev Sci Instrum 86(4):045002
Li J, Zhao H, Qu X et al (2015b) Development of a compact 2-DOF precision piezoelectric positioning platform based on inchworm principle. Sens Actuators A 222:87–95
Li J, Zhao H, Shao M et al (2015c) Design and experimental research of an improved stick–slip type piezo-driven linear actuator. Adv Mech Eng 7(9):1687814015595016
Liang Y, Taya M, Xiao JQ et al (2012) Design of an inchworm actuator based on a ferromagnetic shape memory alloy composite. Smart Mater Struct 21(11):115005
Liu YT, Li BJ (2010) Precision positioning device using the combined piezo-VCM actuator with frictional constraint. Precis Eng 34(3):534–545
Mattson CA (2001) Synthesis through rigid‐body replacement. Handbook of compliant mechanisms, pp 109–121
Neuman J, Nováček Z, Pavera M et al (2015) Experimental optimization of power-function-shaped drive pulse for stick-slip piezo actuators. Precis Eng 42:187–194
Nguyen HX, Edeler C, Fatikow S (2012a) Contact mechanics modeling of piezo-actuated stick–slip microdrives. Phys Mesomech 15(5–6):280–286
Nguyen HX, Edeler C, Fatikow S (2012). Contact mechanics modeling of piezo-actuated stick-slip microdrives. Физичecкaя мeзoмexaникa 15(4)
Oh CH, Choi JH, Nam HJ et al (2010) Ultra-compact, zero-power magnetic latching piezoelectric inchworm motor with integrated position sensor. Sens Actuators A 158(2):306–312
Shamoto E, Moriwaki T (1997) Development of a “walking drive” ultraprecision positioner. Precis Eng 20(2):85–92
Shi Y, Zhao C (2011) A new standing-wave-type linear ultrasonic motor based on in-plane modes. Ultrasonics 51(4):397–404
Tenzer PE, Mrad RB (2004) A systematic procedure for the design of piezoelectric inchworm precision positioners. IEEE/ASME Trans Mechatron 9(2):427–435
Tian Y, Zhang D, Shirinzadeh B (2011) Dynamic modelling of a flexure-based mechanism for ultra-precision grinding operation. Precis Eng 35(4):554–565
Wang S, Zhang Z, Ren L et al (2015) Design and driving characteristics of a novel ‘pusher’ type piezoelectric actuator. Smart Mater Struct 25(1):015005
Yong YK, Moheimani SOR, Kenton BJ et al (2012) Invited review article: high-speed flexure-guided nanopositioning: mechanical design and control issues. Rev Sci Instrum 83(12):121101
Acknowledgments
This research is funded by the Foundation for Innovative Research Groups of the National Natural Science Foundation of China (No. 51521003) and the Self-Planned Task of State Key Laboratory of Robotics and System (No. SKLRS201602C).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, S., Rong, W., Wang, L. et al. Design, analysis and experimental performance of a piezoelectric rotary actuator based on compliant foot driving. Microsyst Technol 23, 3765–3773 (2017). https://doi.org/10.1007/s00542-016-3256-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-016-3256-x