
Abstract
The hybrid minimum principle (HMP) is established for the optimal control of deterministic hybrid systems with both autonomous and controlled switchings and jumps where state jumps at the switching instants are permitted to be accompanied by changes in the dimension of the state space and where the dynamics, the running and switching costs as well as the switching manifolds and the jump maps are permitted to be time varying. First-order variational analysis is performed via the needle variation methodology and the necessary optimality conditions are established in the form of the HMP. A feature of special interest in this work is the explicit presentations of boundary conditions on the Hamiltonians and the adjoint processes before and after switchings and jumps. Analytic and numerical examples are provided to illustrate the results.






Similar content being viewed by others

References
Pontryagin LS, Boltyanskii VG, Gamkrelidze RV, Mishchenko EF (1962) The mathematical theory of optimal processes, vol 4. Wiley Interscience, New York
Puri A, Varaiya P (1994) Verification of hybrid systems using abstractions. In: International Hybrid Systems Workshop. Springer, pp. 359–369
Alur R, Henzinger TA, Lafferriere G, Pappas GJ (2000) Discrete abstractions of hybrid systems. Proc IEEE 88(7):971–984
Alur R, Dang T, Ivančić F (2003) Progress on reachability analysis of hybrid systems using predicate abstraction. In: Proceedings of the 6th international workshop on hybrid systems: computation and control. HSCC, Prague, Czech Republic, p. 4–19
Clarke E, Fehnker A, Han Z, Krogh B, Ouaknine J, Stursberg O et al (2003) Abstraction and counterexample-guided refinement in model checking of hybrid systems. Int J Found Comput Sci 14(04):583–604
Tiwari A, Khanna G (2002) Series of abstractions for hybrid automata. In: Proceedings of the 5th international workshop on hybrid systems: computation and control. HSCC, Stanford, pp. 465–478
Broucke M (1999) A geometric approach to bisimulation and verification of hybrid systems. In: Hybrid systems: computation and control. Springer, pp. 61–75
Helwa MK, Caines PE (2017) In-block controllability of affine systems on polytopes. IEEE Trans Autom Control 62(6):2950–2957
Corona D, Giua A, Seatzu C (2004) Optimal control of hybrid automata: design of a semiactive suspension. Control Eng Pract 12(10):1305–1318 (Analysis and Design of Hybrid Systems)
Goebel R, Sanfelice RG, Teel AR (2012) Hybrid dynamical systems: modeling, stability, and robustness. Princeton University Press, Princeton
Liberzon D (2003) Switching in systems and control, vol 190. Birkhauser, Boston
Liberzon D, Hespanha JP, Morse AS (1999) Stability of switched systems: a lie-algebraic condition. Syst Control Lett 37(3):117–122
Hespanha JP (2004) Uniform stability of switched linear systems: extensions of LaSalle’s invariance principle. IEEE Trans Autom Control 49(4):470–482
Branicky MS (1998) Multiple Lyapunov functions and other analysis tools for switched and hybrid systems. IEEE Trans Autom Control 43(4):475–482
Decarlo RA, Branicky MS, Pettersson S, Lennartson B (2000) Perspectives and results on the stability and stabilizability of hybrid systems. Proc IEEE 88(7):1069–1082
Johansson M, Rantzer A (1998) Computation of piecewise quadratic Lyapunov functions for hybrid systems. IEEE Trans Autom Control 43(4):555–559
Van der Schaft AJ, Schumacher JM (2000) An introduction to hybrid dynamical systems. Lecture notes in control and information sciences, Vol. 251. Springer, London
Bensoussan A, Menaldi JL (1997) Hybrid control and dynamic programming. Dyn Cont Discrete Impuls Syst Ser B Appl Algorithm 3(4):395–442
Dharmatti S, Ramaswamy M (2005) Hybrid control systems and viscosity solutions. SIAM J Control Optim 44(4):1259–1288
Barles G, Dharmatti S, Ramaswamy M (2010) Unbounded viscosity solutions of hybrid control systems. ESAIM Control Optim Calc Var 16(1):176–193
Branicky MS, Borkar VS, Mitter SK (1998) A unified framework for hybrid control: model and optimal control theory. IEEE Trans Autom Control 43(1):31–45
Shaikh MS, Caines PE (2009) A verification theorem for hybrid optimal control problem. In: Proceedings of the IEEE 13th international multitopic conference, INMIC
Caines PE, Egerstedt M, Malhamé R, Schöllig A (2007) A hybrid Bellman equation for bimodal systems. In: Proceedings of the 10th international conference on hybrid systems: computation and control, HSCC, vol. 4416, p. 656–659. LNCS
Schöllig A, Caines PE, Egerstedt M, Malhamé R (2007) A hybrid Bellman equation for systems with regional dynamics. In: Proceedings of the 46th IEEE conference on decision and control, CDC. pp. 3393–3398
Da Silva JE, De Sousa JB, Pereira FL (2012) Dynamic programming based feedback control for systems with switching costs. In: Proceedings of the IEEE international conference on control applications, CCA, pp. 634–639
Hedlund S, Rantzer A (2002) Convex dynamic programming for hybrid systems. IEEE Trans Autom Control 47(9):1536–1540
Clarke FH, Vinter RB (1989) Applications of optimal multiprocesses. SIAM J Control Optim 27(5):1048–1071
Clarke FH, Vinter RB (1989) Optimal multiprocesses. SIAM J Control Optim 27(5):1072–1091
Sussmann HJ (1999) A nonsmooth hybrid maximum principle. In: Aeyels D, Lamnabhi-Lagarrigue F, van der Schaft A (eds) Stability and stabilization of nonlinear systems. London, Springer, pp 325–354
Sussmann HJ (1999) Maximum principle for hybrid optimal control problems. In: Proceedings of the 38th IEEE conference on decision and control, CDC. pp. 425–430
Caines PE, Clarke FH, Liu X, Vinter RB (2006) A maximum principle for hybrid optimal control problems with pathwise state constraints. In: Proceedings of the 45th IEEE conference on decision and control, pp. 4821–4825
Shaikh MS, Caines PE (2007) On the hybrid optimal control problem: theory and algorithms. IEEE Trans Autom Control 52(9):1587–1603
Garavello M, Piccoli B (2005) Hybrid necessary principle. SIAM J Control Optim 43(5):1867–1887
Taringoo F, Caines PE (2013) On the optimal control of impulsive hybrid systems on Riemannian manifolds. SIAM J Control Optim 51(4):3127–3153
Pakniyat A, Caines PE (2017) On the relation between the minimum principle and dynamic programming for classical and hybrid control systems. IEEE Trans Autom Control 62(9):4347–4362
Jafarpour S, Lewis AD (2016) Locally convex topologies and control theory. Math Control Signals Syst 28(4):29
Shaikh MS, Caines PE (2005) Optimality zone algorithms for hybrid systems computation and control: from exponential to linear complexity. In: Proceedings of the 44th IEEE conference on decision and control, and the european control conference, CDC-ECC ’05. vol, 2005, pp. 1403–1408
Taringoo F, Caines PE (2011) Gradient geodesic and Newton geodesic HMP algorithms for the optimization of hybrid systems. Annu Rev Control 35(2):187–198
Axelsson H, Wardi Y, Egerstedt M, Verriest E (2008) Gradient descent approach to optimal mode scheduling in hybrid dynamical systems. J Optim Theory Appl 136(2):167–186
Boccadoro M, Wardi Y, Egerstedt M, Verriest E (2005) Optimal control of switching surfaces in hybrid dynamical systems. Discrete Event Dyn Syst 15(4):433–448
Gonzalez H, Vasudevan R, Kamgarpour M, Sastry SS, Bajcsy R, Tomlin CJ (2010) A descent algorithm for the optimal control of constrained nonlinear switched dynamical systems. In: Proceedings of the 13th ACM international conference on Hybrid systems: computation and control, ACM, pp. 51–60
Zhao P, Mohan S, Vasudevan R (2019) Optimal control of polynomial hybrid systems via convex relaxations. IEEE Trans Autom Control 65(5):2062–2077
Zhu F, Antsaklis PJ (2015) Optimal control of hybrid switched systems: a brief survey. Discret Event Dyn Syst 25(3):345–364
Passenberg B, Leibold M, Stursberg O, Buss M (2011) The minimum principle for time-varying hybrid systems with state switching and jumps. In: Proceedings of the 50th IEEE conference on decision and control and european control conference, CDC-ECC. pp. 6723–6729
Cowlagi RV (2017) Hierarchical trajectory optimization for a class of hybrid dynamical systems. Automatica 77:112–119
Mamakoukas G, MacIver MA, Murphey TD (2018) Feedback synthesis for underactuated systems using sequential second-order needle variations. Int J Robot Res 37(13–14):1826–1853
Riedinger P, Kratz F (2003) An optimal control approach for hybrid systems. Eur J Control 9(5):449–458
Xu X, Antsaklis PJ (2004) Optimal control of switched systems based on parameterization of the switching instants. IEEE Trans Autom Control 49(1):2–16
Azhmyakov V, Boltyanski VG, Poznyak A (2008) Optimal control of impulsive hybrid systems. Nonlinear Anal Hybrid Syst 2(4):1089–1097
Dmitruk AV, Kaganovich AM (2008) The hybrid maximum principle is a consequence of Pontryagin maximum principle. Syst Control Lett 57(11):964–970
Dmitruk AV, Kaganovich AM (2011) Maximum principle for optimal control problems with intermediate constraints. Comput Math Model 22(2):180–215
Dmitruk AV, Kaganovich AM (2011) Quadratic order conditions for an extended weak minimum in optimal control problems with intermediate and mixed constraints. Discr Contin Dyn Syst 29:523–545
Pakniyat A, Caines PE (2014) On the relation between the minimum principle and dynamic programming for hybrid systems. In: Proceedings of the 53rd IEEE conference on decision and control, CDC. pp. 19–24
Pakniyat A, Caines PE (2013) The hybrid minimum principle in the presence of switching costs. In: Proceedings of the 52nd IEEE conference on decision and control, CDC. pp. 3831–3836
Westervelt ER, Chevallereau C, Choi JH, Morris B, Grizzle JW (2007) Feedback control of dynamic bipedal robot locomotion. CRC Press, Boca Raton
Pakniyat A, Caines PE (2017) Hybrid optimal control of an electric vehicle with a dual-planetary transmission. Nonlinear Anal Hybrid Syst 25:263–282
Pakniyat A, Caines PE (2015) Time optimal hybrid minimum principle and the gear changing problem for electric vehicles. In: Proceedings of the 5th IFAC conference on analysis and design of hybrid systems. Atlanta, pp. 187–192
Pakniyat A, Caines PE (2014) On the minimum principle and dynamic programming for hybrid systems. In: Proceedings of the 19th international federation of automatic control world congress, IFAC, p. 9629–9634
Pakniyat A, Caines PE (2015) On the minimum principle and dynamic programming for hybrid systems with low dimensional switching manifolds. In: Proceedings of the 54th IEEE conference on decision and control, Japan. pp. 2567–2573
Pakniyat A, Caines PE (2015) On the relation between the hybrid minimum principle and hybrid dynamic programming: a linear quadratic example. In: Proceedings of the 5th IFAC conference on analysis and design of hybrid systems. pp. 169–174
Taringoo F, Caines PE (2010) Gradient-geodesic HMP algorithms for the optimization of hybrid systems based on the geometry of switching manifolds. In: Proceedings of the 49th IEEE conference on decision and control, CDC. pp. 1534–1539
Pakniyat A, Caines PE (2016) On the stochastic minimum principle for hybrid systems. In: Proceedings of the 55th IEEE conference on decision and control. pp. 1139–1144
Caines PE (2017) Lecture notes on nonlinear and hybrid control systems: dynamics, stabilization and optimal control. Department of Electrical and Computer Engineering (ECE), McGill University
Agrachev AA, Sachkov Y (2013) Control theory from the geometric viewpoint, vol 87. Springer Science & Business Media, Berlin
Rudin W (1987) Real and complex analysis. McGraw-Hill, New York
Sontag ED (1998) Mathematical control theory: deterministic finite dimensional systems. texts in applied mathematics. Springer, New York
Pakniyat A, Caines PE (2020) On the hybrid minimum principle: the Hamiltonian and adjoint boundary conditions. IEEE Trans Autom Control 66(3):1246–1253
Acknowledgements
This work is supported in part by NSERC (Canada) Grant RGPIN-2019-05336, the U.S. ARL and ARO Grant W911NF1910110, and the U.S. AFOSR Grant FA9550-19-1-0138.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors certify that they have no affiliations with or involvement in any organization or entity with any financial interest or non-financial interest in the subject matter or materials discussed in this manuscript. The authors have no financial or proprietary interests in any material discussed in this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A Proof of Lemma 1
Appendix A Proof of Lemma 1
Proof
Let us define
where \(B_{r}:=\left\{ x \in {\mathbb {R}}^{n_{q}}: \left\| x\right\| ^2 <r^2\right\} \).
we first consider the stage where no remaining switching is available and hence \(t\in \left( t_L,t_{L+1}\right) = \left( t_L,t_{f}\right) \). In this the case that
which gives
where \(L_{f}\) is defined in assumptions A0. By the Gronwall-Bellman inequality this results in
where \(K_{2}=\max \left\{ K_{1},L_{f}K_{1}\left( t_{f}-t_{L}\right) e^{L_{f}\left( t_{f}-t_{L}\right) }\right\} \). Hence, by the semi-group properties of ODE solutions and by use of (A4), for \(s \ge t\) and \(x_s \in N_{r_{x}}\left( x_t\right) \) we have
and therefore, by the Gronwall inequality we have
for some \(K<\infty \) which depends only on \(t_f - t_L\), \(K_1\) and \({\tilde{K}}_f\) and not on the control input.
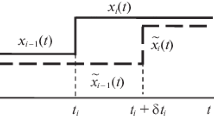
Now consider \(t,s\in \left( t_j,t_{j+1}\right) \) where \(t_{j+1}\) indicates a time of an autonomous switching for the trajectory \(x\left( \tau ;t,x_{t}\right) \), and consider for definiteness the case where \(x\left( \tau ;s,x_{s}\right) \) arrives on the switching manifold described locally by \(m\left( x\right) = 0\) at a later time \(t_{j+1}+\delta t\) (the case with an earlier arrival time can be handled similarly by considering \(\delta t<0\)). It directly follows by replacing \(f_{q_L}\) and \(t_{f}\) by \(f_{q_j}\) and \(t_{j+1}-\) in the above arguments, that
Now since
and
it is sufficient to show that the upper bound for \(\left| \delta t\right| \) is proportional to \(\big (\left\| x_{t}-x_{s}\right\| ^{2}+\left| s-t\right| ^{2}\big )^{\frac{1}{2}}\). This can be shown to hold by considering the fact that
For \(\left\| \delta x\left( t_{j+1}-\right) \right\| < \epsilon _{j+1}\) sufficiently small,
which is equivalent to
Due to the transversal arrival of the trajectories with respect to the smooth switching manifold, \(\left| \nabla m^{\top } f_{q_j}\right| \) is lower bounded by a strictly positive number \(k_{m,f}\) (see (2)) and hence,
which gives
Hence, for \(t\in \left( t_j,t_{j+1}\right) \) and \(x_t\in B_r\) there exist a neighborhood \(N_{r_x}\left( x_t\right) \) such that for \(s\in \left( t_j,t_{j+1}\right) \) and \(x_s \in \mathcal{N}_{r_x}\left( x_t\right) \) we have \(\left\| \delta x\left( t_{j+1}-\right) \right\| \le K^{\prime }\left( \left\| x_{t}-x_{s}\right\| ^{2}+\left| s-t\right| ^{2}\right) ^{\frac{1}{2}} < \epsilon _{j+1}\) in order to ensure that \(\delta t \le K_{j+1} \epsilon _{j+1}\) and consequently
for K independent of the control. Since \(\xi \) is smooth and time invariant, it is therefore Lipschitz in x uniformly in time. \(\square \)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Pakniyat, A., Caines, P.E. The minimum principle of hybrid optimal control theory. Math. Control Signals Syst. 36, 21–70 (2024). https://doi.org/10.1007/s00498-023-00374-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00498-023-00374-1