
Abstract
Background
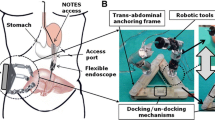
Endoluminal therapeutic procedures such as endoscopic submucosal dissection are increasingly attractive given the shift in surgical paradigm towards minimally invasive surgery. This novel three-channel articulated robot was developed to overcome the limitations of the flexible endoscope which poses a number of challenges to endoluminal surgery. The device enables enhanced movement in a restricted workspace, with improved range of motion and with the accuracy required for endoluminal surgery.
Objective
To evaluate a novel flexible robot for therapeutic endoluminal surgery.
Design
Bench-top studies.
Setting
Research laboratory.
Intervention
Targeting and navigation tasks of the robot were performed to explore the range of motion and retroflexion capabilities. Complex endoluminal tasks such as endoscopic mucosal resection were also simulated.
Main outcome measurements
Successful completion, accuracy and time to perform the bench-top tasks were the main outcome measures.
Results
The robot ranges of movement, retroflexion and navigation capabilities were demonstrated. The device showed significantly greater accuracy of targeting in a retroflexed position compared to a conventional endoscope.
Limitations
Bench-top study and small study sample.
Conclusions
We were able to demonstrate a number of simulated endoscopy tasks such as navigation, targeting, snaring and retroflexion. The improved accuracy of targeting whilst in a difficult configuration is extremely promising and may facilitate endoluminal surgery which has been notoriously challenging with a conventional endoscope.






Similar content being viewed by others


Abbreviations
- ESD:
-
Endoscopic submucosal dissection
- GOJ:
-
Gastro-oesophageal junction
- DoF:
-
Degrees of freedom
References
Saito Y, Fukuzawa M, Matsuda T, Fukunaga S et al (2010) Clinical outcome of endoscopic submucosal dissection versus endoscopic mucosal resection of large colorectal tumors as determined by curative resection. Surg Endosc 24:343–352
Cao Y, Liao C, Tan A, Gao Y et al (2009) Meta-analysis of endoscopic submucosal dissection versus endoscopic mucosal resection for tumors of the gastrointestinal tract. Endoscopy 41:751–757
Oka S, Tanaka S, Kaneko I, Mouri R et al (2006) Advantage of endoscopic submucosal dissection compared with EMR for early gastric cancer. Gastrointest Endosc 64:877–883
Chiu P, Teoh A, To K, Wong S et al (2012) Endoscopic submucosal dissection (ESD) compared with gastrectomy for treatment of early gastric neoplasia: a retrospective cohort study. Surg Endosc 26:3584–3591
Saito Y, Uraoka T, Matsuda T, Emura F et al (2007) Endoscopic treatment of large superficial colorectal tumors: a case series of 200 endoscopic submucosal dissections (with video). Gastrointest Endosc 66:966–973
Fujishiro M, Yahagi N, Kakushima N, Kodashima S et al (2007) Outcomes of endoscopic submucosal dissection for colorectal epithelial neoplasms in 200 consecutive cases. Clin Gastroenterol Hepatol 5:678–683
Sakamoto N, Osada T, Shibuya T, Beppu K et al (2009) Endoscopic submucosal dissection of large colorectal tumors by using a novel spring-action S-O clip for traction (with video). Gastrointest Endosc 69:1370–1374
Kato M, Gromski M, Jung Y, Chuttani R et al (2013) The learning curve for endoscopic submucosal dissection in an established experimental setting. Surg Endosc 27:154–161
Dallemagne B, Marescaux J (2010) The ANUBIS project. Minim Invasive Ther Allied Technol 19(5):257–261
Spaun GO, Zheng B, Swanström LL (2009) A multitasking platform for natural orifice translumenal endoscopic surgery (NOTES): a benchtop comparison of a new device for flexible endoscopic surgery and a standard dual-channel endoscope. Surg Endosc 23(12):2720–2727
Fuchs KH, Breithaupt W (2012) Transgastric small bowel resection with the new multitasking platform EndoSamurai™ for natural orifice transluminal endoscopic surgery. Surg Endosc 26(8):2281–2287
Thompson CC, Ryou M, Soper NJ et al (2009) Evaluation of a manually driven, multitasking platform for complex endoluminal and natural orifice translumenal endoscopic surgery applications (with video). Gastrointest Endosc 70(1):121
Seneci CA, Shang J, Leibrandt K, Vitiello V, Patel N, Darzi A, Teare J, Yang GZ (2014) Design and evaluation of a novel flexible robot for transluminal and endoluminal surgery, IEEE (Accessed June 2014, in press)
Ota T, Degani A, Schwartzman D, Zubiate B et al (2009) A highly articulated robotic surgical system for minimally invasive surgery. Ann Thorac Surg 87(4):1253–1256
Neuzil P, Cerny S, Kralovec S, Svanidze O et al (2013) Single-site access robot-assisted epicardial mapping with a snake robot: preparation and first clinical experience. J Robot Surg 7(2):103–111
Johnson PJ, Serrano CM, Castro M, Kuenzler R et al (2013) Demonstration of transoral surgery in cadaveric specimens with the medrobotics flex system. Laryngoscope 123(5):1168–1172
Cosentino F, Tumino E, Passoni GR, Morandi E et al (2009) Functional evaluation of the endotics system, a new disposable self-propelled robotic colonoscope: in vitro tests and clinical trial. Int J Artif Organs 32:517–527
Eickhoff A, van Dam J, Jakobs R, Kudis V et al (2007) Computer-assisted colonoscopy (the NeoGuide Endoscopy System): results of the first human clinical trial (“PACE study”). Am J Gastroenterol 102:261–266
Phee SJ, Low SC, Sun ZL, Ho KY, Huang WM, Thant ZM (2008) Robotic system for no-scar gastrointestinal surgery. Int J Med Robot 4(1):15–22. doi:10.1002/rcs.179
Madhanir AJ, Niemeyer G, Salisbury Kenneth Jr (1998) The black falcon: a teleoperated surgical instrument for minimally invasive surgery. Proc 1998 IEEE/RSJ Int Conf Intell Robots Syst 48:936–944
Acknowledgments
This project was funded by a Wellcome Trust grant (P13145).
Disclosures
Dr Nisha Patel, Mr Carlo A Seneci, Dr Jianzhong Shang, Konrad Leibrandt, Professor Guang-Zhong Yang, Professor Lord Ara Darzi of Denham and Professor Julian Teare have no conflicts of interest or financial ties to disclose.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Patel, N., Seneci, C.A., Shang, J. et al. Evaluation of a novel flexible snake robot for endoluminal surgery. Surg Endosc 29, 3349–3355 (2015). https://doi.org/10.1007/s00464-015-4088-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00464-015-4088-y