
Abstract
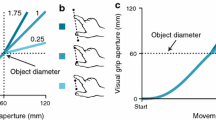
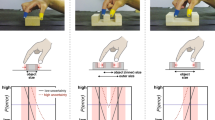
To successfully lift an object, a person’s fingers must be moved to locations where forces can be applied that are sufficient for maintaining contact and that allow for easy object manipulation. Obtaining such finger positions becomes more difficult when there is perceptual uncertainty about the location of the hand and object. However, knowledge about the amount of uncertainty could be incorporated into grasp plans to mitigate its effect. For example, during peripheral viewing the fingers could open wider to avoid colliding with or missing the object. The goal of this study is to determine the degree to which people incorporate their understanding of visual uncertainty when making a precision grasp. To investigate, subjects reached to a spatially fixed object whose retinal location was varied by fixating points 0–80° to the left of the object. This manipulation controlled the visual uncertainty of the hand and target without affecting the kinematic demands of the task. We found that people systematically changed their grasping behavior as a function of the amount of visual uncertainty in the task. Specifically, subjects’ maximum grip aperture increased linearly with target eccentricity. Moreover, the effect of visual uncertainty on finger trajectories could be captured by a single dimension of change along an axis. Together, these findings suggest that the sensorimotor system estimates visual uncertainty and behaviorally adjusts for it during grasping movements.








Similar content being viewed by others

References
Berthier NE, Clifton RK, Gullipalli V, McCall D, Robin D (1996) Visual information and object size in the control of reaching. J Motor Behav 28:187–197
Brown LE, Halpert BA, Goodale MA (2005) Peripheral vision for perception and action. Exp Brain Res 165:97–106
Burbeck CA (1987) Position and spatial frequency in large-scale localization judgments. Vision Res 27:417–428
Burbeck CA, Yap YL (1990) Two mechanisms for localization? Evidence for separation-dependent and separation-independent processing of position information. Vision Res 30:739–750
Cheng S, Sabes PN (2006) Modeling sensorimotor learning with dynamical systems. Neural Comput 18:760–793
Chieffi S, Gentilucci M (1993) Coordination between the transport and the grasp components during prehension movements. Exp Brain Res 94:471–477
Connolly JD, Goodale MA (1999) The role of visual feedback of hand position in the control of manual prehension. Exp Brain Res 125:281–286
Cuijpers RH, Smeets JB, Brenner E (2004) On the relation between object shape and grasping kinematics. J Neurophysiol 91:2598–2606
Hamilton AF, Wolpert DM (2002) Controlling the action of statistics: obstacle avoidance. J Neurophysiol 87:2434–2440
Harris CM, Wolpert DM (1998) Signal dependent noise determines motor planning. Nature 394:780–784
Hawkins DM (1994) The feasible solution algorithm for least trimmed squares regression. Comput Stat Data Anal 17:185–196
Jeannerod M (1981) Intersegmental coordination during reaching at natural visual objects. In: Long J, Baddeley A (eds) Attention and performance IX, Erlbaum, Hillsdale, pp 153–169
Jeannerod M (1984) The timing of natural prehension movements. J Motor Behav 16:235–254
Kording KP, Wolpert DM (2004) Bayesian integration in sensorimotor learning. Nature 427:244–247
Levi DM, Klein SA (1996) Limitations on position coding imposed by undersampling and univariance. Vision Res 36:2111–2120
Niemeier M, Crawford JD, Tweed DB (2003) Optimal transsaccadic integration explains distorted spacial perception. Nature 422:76–80
Paulignan Y, Jeannerod M, MacKenzie C, Marteniuk (1991) Selective perturbation of visual input during prehension movements 2. The effects of changing object size. Exp Brain Res 87:407–420
Paulignan Y, Frak VG, Toni I, Jeannerod M (1997) Influence of object position and size on human prehension movements. Exp Brain Res 114:226–234
Sabes PN, Jordan MI (1997) Obstacle avoidance and a sensitivity model of motor planning. J Neurosci 17:7119–7128
Saunders J, Knill DC (2004) Visual feedback control of hand movements. J Neurosci 24:3223–3234
Sivak B, MacKenzie CL (1990) Integration of visual information and motor output in reaching and grasping: the contributions of peripheral and central vision. Neuropsychologia 28:1095–1116
Smeets JBJ, Brenner E (1999) A new view on grasping. Motor Control 3:237–271
Trommershauser J, Maloney LT, Landy MS (2003) Statistical decision theory and the selection of rapid, goal-directed movements. J Opt Soc Am A 20:1419–1433
Trommershauser J, Gepshtein S, Maloney LT, Landy MS, Banks MS (2005) Optimal compensation for changes in task-relevant movement variability. J Neurosci 25:7169–7178
van Beers RJ, Sittig AC, Denier van der Gon JJ (1998) The precision of proprioceptive position sense. Exp Brain Res 122:367–377
Verboven S, Hubert M (2005) LIBRA: a MATLAB Library for Robust Analysis. Chemom Intell Lab Syst 75:127–136
Whitaker K, Latham K (1997) Disentangling the role of spatial scale, separation and eccentricity in Weber’s law for position. Vision Res 37:515–524
Wing AM, Turton A, Fraser C (1986) Grasp size and accuracy of approach in reaching. J Motor Behav 18:245–260
Wolpert DM, Ghahramani Z, Jordan MI (1995) An internal model for sensorimotor integration. Science 269:1880–1882
Acknowledgment
This project was funded by NIH grant NEI R01 EY015261.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Schlicht, E.J., Schrater, P.R. Effects of visual uncertainty on grasping movements. Exp Brain Res 182, 47–57 (2007). https://doi.org/10.1007/s00221-007-0970-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-007-0970-8