
Abstract
We give rigidity results for the discrete Bonnet–Myers diameter bound and the Lichnerowicz eigenvalue estimate. Both inequalities are sharp if and only if the underlying graph is a hypercube. The proofs use well-known semigroup methods as well as new direct methods which translate curvature to combinatorial properties. Our results can be seen as first known discrete analogues of Cheng’s and Obata’s rigidity theorems.
Similar content being viewed by others

1 Introduction
The hypercube is a well studied object and a variety of combinatorial characterizations have been established. For a survey article on combinatorial properties of the hypercube, see [12]. We want to point out two particular hypercube characterizations in the literature. One goes back to Foldes.
Theorem 1.1
(see [9]) An unweighted graph G is a hypercube if and only if
-
G is bipartite and
-
For all vertices x, y, the number of shortest paths between x and y is d(x, y)!.
The other hypercube characterization has been found by Laborde and Hebbare.
Theorem 1.2
(see [16]) An unweighted graph G is a hypercube if and only if
-
\(\#V = 2^{{\text {Deg}}_{\min }}\) and
-
Every pair of adjacent edges is contained in a 4-cycle.
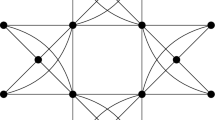
Another question one might ask is whether the hypercube is already uniquely determined by its local structure. In particular, one might conjecture that every bipartite, regular graph with all two-balls isomorphic to the hypercube two-ball, needs to be the hypercube. However, this has been disproven by Labborde and Hebbare by the example given in Fig. 1 (see [16]).

The illustrated graph is bipartite, 4-regular and locally isomorphic to the hypercube in the sense of two-balls but is not the hypercube
The hypercube characterization we present in this paper is completely different in spirit. Our approach is inspired by Riemannian geometry. On Riemannian manifolds, Ricci curvature is a highly fruitful concept to deduce many interesting analytic and geometric properties like Li–Yau inequality, parabolic Harnack inequality and eigenvalue estimates like Buser inequality. Assuming a positive lower Ricci-curvature bound yields eminently strong implications. One of them is Myers’ diameter bound stating that a complete, connected n-dimensional manifold with Ricci-curvature at least a positive constant \(K>0\) has a diameter smaller or equal than the n-dimensional sphere with Ricci-curvature K (see [23]). The other implication we are interested in this article is the Lichnerowicz eigenvalue bound. It states that if the Ricci-curvature is larger than a positive constant \(K>0\), then one can lower bound the first non-zero eigenvalue of the Laplace–Beltrami operator by \(\frac{nK}{n-1}\). Impressive rigidity results have been found by Cheng [4] and Obata [24], respectively. They have proven that rigidity of the diameter bound as well as rigidity of the Lichnerowicz eigenvalue estimate can only be attained on the round sphere.
A remarkable analogy between the round sphere \(S_N\) and the hypercube \(H_N\) is that in both cases, the concentration of measure converges to the Gaussian measure when taking the dimension to infinity. By concentration of measure we mean a measure C on \([0,\infty )\) given by \(C_{S_N}(A) := {\text {vol}}(x \in S_N : d(x,x_0) \in A)\) for a fixed \(x_0 \in S_N\) and \(C_{H_N}(A) := {\text {vol}}(x \in H_N : d(x,x_0) \in A)\) for a fixed \(x_0 \in H_N\) when taking the natural volume measure \({\text {vol}}\) and distance d on \(S_N\) and \(H_N\). Taking a suited normalization yields convergence in distribution of \(C_{S_N}\) and \(C_{H_N}\) to the Gaussian measure \(C_G\) with density \(C_G(dx) = e^{-x^2}\). For details, see e.g. [11, 26]. This analogy between the round sphere and the hypercube motivates the question whether rigidity properties similar to Cheng’s and Obata’s sphere theorems hold true for the hypercube. In this paper, we positively answer this question.
While theory of Riemannian manifolds is understood very well, the era of computer science demands for discrete objects instead of continuous manifolds. Graphs were introduced as a discrete setting to approximate the behavior of manifolds. This was the birth of discrete differential geometry. According to classical differential geometry, there are various approaches to study curvature and Ricci-curvature in particular. We mention the coarse Ricci-curvature by Ollivier using Wasserstein-metrics [27], the Ricci-curvature via convexity of the entropy by Sturm [29, 30], Lott and Villani [22], and the Bakry–Émery–Ricci-curvature [1]. When explaining curvature of manifolds, the canonical examples are the sphere for positive, the Euclidean plane for zero, and the hyperbolic space for negative curvature. Related examples can also be given on graphs. These are hypercubes for positive, lattices for zero and trees for negative curvature. In a certain sense, the meaningfulness of a discrete curvature notion can be measured via these examples. Indeed, the question of the Ricci-curvature of the hypercube has recently attracted interest among several mathematical communities (see [7, 10, 11, 15, 25, 31]) and was asked verbatim by Stroock in a seminar as early as 1998, in a context of logarithmic Sobolev inequalities. In this article, the hypercube plays one of the leading roles.
The other leading role is played by Bakry and Emery’s Ricci-curvature. Due to Bakry and Émery’s breakthrough in 1985, a Ricci-curvature notion also became available for discrete settings. Naturally, the question arises whether the strong implications of Ricci-curvature bounds also hold true for graphs. This is a vibrant topic of recent research and many results in analogy to manifolds have been established.
We want to particularly point out the discrete version of Myers diameter bound (see [19] and weaker versions in [8, 13]) and Lichnerowicz eigenvalue bound (see e.g. [3, 20]).
Proposition 1.3
Let \(G=(V,E)\) be a simple (i.e., without loops and multiple edges) connected graph satisfying \(CD(K,\infty )\) for some \(K > 0\). Assume that the vertex degree of G is bounded by \(D < \infty \). Then G is finite.
Let \({\text {diam}}(G)\) be the diameter of G w.r.t the combinatorial graph distance. Let \(0=\lambda _0<\lambda _1 \le \lambda _2 \le \cdots \) be the eigenvalues of the non-normalized Laplacian \(-\Delta \), defined in (1.3) below. Then,
-
(1)
G satisfies Myers diameter bound, i.e.,
$$\begin{aligned} {\text {diam}}(G)\le \frac{2D}{K}. \end{aligned}$$ -
(2)
G satisfies Lichnerowicz eigenvalue estimate, i.e.,
$$\begin{aligned} \lambda _1 \ge K. \end{aligned}$$
Finiteness of G and assertion (1) follows from [19, Corollary 2.2]. Assertion (2) is the Lichnerowicz spectral gap theorem which can be found in [3, 20] in the graph case.
It is now natural to ask whether analogues of Cheng’s and Obata’s theorems are still valid on graphs. This article is dedicated to positively answer this question and to prove that indeed a discrete version of these rigidity results holds true. A characterization will be given via the hypercube which shall be seen as a discrete analogue of the Euclidean sphere.
For convenience, we first state our main results for unweighted graphs.
Theorem 1.4
Let \(G=(V,E)\) be a finite simple connected graph. Let D be the maximal vertex degree. Let \(0=\lambda _0<\lambda _1 \le \lambda _2 \le \cdots \) be the eigenvalues of the non-normalized Laplacian \(-\Delta \), defined in (1.3) below. The following are equivalent:
-
(1)
G is a D-dimensional hypercube.
-
(2)
G satisfies \(CD(K,\infty )\) for some \(K>0\) and \(\lambda _D = {K}\).
-
(3)
G satisfies \(CD(K,\infty )\) for some \(K>0\) and \({\text {diam}}(G) = \frac{2 D}{K}\).
The theorem is a direct consequence of the main theorem (Theorem 2.12) which is concerned with weighted graphs. Note that the optimal curvature bound of hypercubes is \(CD(2,\infty )\).
Remark 1.5
Theorem 1.4 is connected to the eigenvalue- and diameter bounds from Proposition 1.3 in the following way:
-
Statement (2) means sharpness of the eigenvalue bound \(\lambda _D \ge \lambda _1 \ge {K}\) whenever \(CD(K,\infty )\) is satisfied, see [20, Theorem 1.6]. It is crucial to assume \(\lambda _D=K\) and not only \(\lambda _1=K\) since the latter is not strong enough to imply that G is the hypercube (see Example 3.2). However, the hypercube characterization via \(\lambda _D=K\) also holds for weighted graphs without further assumptions.
-
Statement (3) means sharpness of the diameter bound \({\text {diam}}(G) \le \frac{2 D}{K}\) whenever \(CD(K,\infty )\) is satisfied (see [19, Corollary 2.2]). To give a hypercube characterization for weighted graphs, we will need to have a further assumption on the uniformity of the edge weight and vertex measure (see Definition 1.7, Sects. 2.3 and 4.3).
But before we present our proof strategies and the main theorem for weighted graphs, we explain the organization of the paper and introduce our setup and notations.
1.1 Organization of the paper
In Sect. 2, we introduce our main concepts for exploring sharpness of the CD-inequality. In particular in Sect. 2.5, we present our main theorem (Theorem 2.12), i.e., the characterization of the hypercube via curvature sharpness for weighted graphs. We give a short proof of our main theorem in this subsection under assumption of the concepts given until there. All further sections are dedicated to prove the main concepts from Sect. 2.
1.2 General setup and notation
Let us start with a rather general definition of a graph. A triple \(G=(V,w,m)\) is called a (weighted) graph if V is a countable set, if \(w:V^2=V\times V \rightarrow [0,\infty )\) is symmetric and zero on the diagonal and if \(m:V \rightarrow (0,\infty )\). We call V the vertex set, and w the edge weight and m the vertex measure. For \(x,y\in V\), we write \(x\sim y\) whenever \(w(x,y)>0\). In the following, we only consider locally finite graphs, i.e., for every \(x \in V\) there are only finitely many \(y \in V\) with \(w(x,y) >0\). We define the graph Laplacian \({{\mathbb {R}}}^V \rightarrow {{\mathbb {R}}}^V\) via
We write
and \({\text {Deg}}_{\max }:= \sup _x {\text {Deg}}(x)\). Furthermore, we define the combinatorial vertex degree \(\deg (x):=\#\{y:y\sim x\}\) and \(\deg _{\max }:=\sup _x \deg (x)\). In this article, we will always assume \({\text {Deg}}_{\max }< \infty \) and \(\deg (x) < \infty \) for all \(x \in V\). Moreover for \(A,B \subset V\), we write \({\text {vol}}(A):=m(A):=\sum _{x\in A} m(x)\) and
For some of our rigidity results, we restrict our considerations to unweighted graphs.
Definition 1.6
(Unweighted representation of a graph) For a graph \(G=(V,w,m)\), we define the set of unoriented edge set \(E:=\{\{x,y\}:w(x,y)>0\}\). We call \({\widetilde{G}}:=(V,E)\) to be an unweighted representation of G. We call \(G=(V,E)\) to be an unweighted graph and we define the non-normalized Laplacian as
If furthermore \(w(x,y) \in \{0,1\}\) and \(m(x) = 1\) for all \(x,y \in V\), we identify G with \({\widetilde{G}}\) since the Laplacians of G and \({\widetilde{G}}\) coincide. Moreover, an unweighted graph \(G=(V,E)\) is simple, i.e., it has no multiple edges by the very construction and G is without loops since we have \(w(x,x)=0\) for all \(x \in V\).
For rigidity results on the diameter, we need uniformity of the edge degree which we define now.
Definition 1.7
(Edge degree) Let \(G=(V,w,m)\) be a weighted graph. Let \(E^{or}:=\{(x,y):x\sim y\}\) be the set of oriented edges, i.e., we distinguish an edge (x, y) from (y, x). Additionally to the vertex degrees \(\deg \) and \({\text {Deg}}\), we define the edge degree \(q:E^{or} \rightarrow {{\mathbb {R}}}_+\) via \(q(x,y):=w(x,y)/m(x)\). We say that G has constant edge degree \(q_0\) if \(q(x,y) \in \{0,q_0\}\) for all \(x,y\in V\).
We remark that the notation \(q\) corresponds to a standard notation of Markov kernels, but in our setting, we do not need any normalization property of \(q\).
Let us give a definition of the hypercube which is particularly useful for our purposes.
Definition 1.8
(Hypercube) Let \(D \in {\mathbb {N}}\) and let \([D]:=\{1,\ldots ,D\}\). We denote the power set by \(\mathcal P\). For \(A,B \in \mathcal P([D])\), we denote the symmetric difference by \(A \ominus B := (A \cup B) {\setminus } (A \cap B)\). We define \(E_D := \{\{A,B\} \in \mathcal P([D])\times \mathcal P([D]) : \#(A \ominus B) =1 \}\). Then the unweighted graph \(H_D=(\mathcal P([D]),E_D)\) is a realisation of a D-dimensional hypercube. We say a weighted graph \(G=(V,w,m)\) is a D-dimensional hypercube if its unweighted representation \({\widetilde{G}}\) is a D-dimensional hypercube.
Remark 1.9
This definition is equivalent to another standard definition of the hypercube, i.e., \(H_D \cong (\{0,1\}^D,E)\) s.t. \(v\sim w\) iff \(\Vert v-w\Vert _1=1\) for all \(v,w \in \{0,1\}^D\).
Definition 1.10
(Bakry–Émery-curvature) The Bakry–Émery-operators for functions \(f,g: V \rightarrow {{\mathbb {R}}}\) are defined via
and
We write \(\Gamma (f):= \Gamma (f,f)\) and \(\Gamma _2(f):=\Gamma _2(f,f)\).
A graph G is said to satisfy the curvature dimension inequality CD(K, n) for some \(K\in {{\mathbb {R}}}\) and \(n\in (0,\infty ]\) at a vertex \(x \in V\) if for all \(f: V \rightarrow {{\mathbb {R}}}\),
G satisfies CD(K, n) (globally), if it satisfies CD(K, n) at all vertices.
We remark \( 2\Gamma (f,g)(x) = \frac{1}{m(x)} \sum _{y \sim x} w(x,y)(f(y)-f(x))(g(y)-g(x))\) for \(f,g:V\rightarrow {{\mathbb {R}}}\) and \(x \in V\). Therefore, \(\Gamma (f) \ge 0\). Now we define the combinatorial metric and diameter.
Definition 1.11
(Combinatorial metric) Let \(G=(V,w,m)\) be a locally finite graph. We define the combinatorial metric \(d:V^2 \rightarrow [0,\infty )\) via
and the combinatorial diameter via \({\text {diam}}(G) := \sup _{x,y \in V} d(x,y)\).
We define the backwards-degree w.r.t. \(x_0\in V\) via
and the forwards-degree
For \(A \subset V\), we define \(d_A(x) := w(\{x\},A)/m(x).\) The sphere and ball of radius k around \(x \in V\) are defined as \(S_k(x):=\{y \in V: d(x,y)=k\}\) and \(B_k(x):=\{y \in V: d(x,y)\le k\}\).
2 Concepts and main results for weighted graphs
In this section, we start considering abstract criteria for sharpness of the CD inequality. The criteria will be applied to the distance functions which will motivate the notion of a hypercube shell structure. For characterization of diameter sharpness, we moreover need a constant edge degree which essentially means standard weights. Additionally to the abstract criteria of CD sharpness, we need a combinatorial approach via the small sphere property and the non-clustering property (see Definition 2.9) to characterize the hypercube.
2.1 Abstract curvature sharpness properties
In our investigations of sharpness of the CD inequality, we start with a basic observation. Suppose a graph \(G=(V,w,m)\) satisfies \(CD(K,\infty )\), then for all \(f \in C(V)\), one has
-
(1)
\(e^{-2Kt} P_t \Gamma f \ge \Gamma P_t f\).
-
(2)
\(\Gamma _2 f \ge K \Gamma f\).
-
(3)
\(\lambda _1 \ge K\).
The first assertion in the manifold case can be found e.g. in [2, Proposition 3.3], in [17, Lemma 5.1], and in [32, Theorem 1.1]. For graphs, it can be found e.g. in [21, Lemma 2.11] and [18, Theorem 3.1]. The second assertion is the definition of \(CD(K,\infty )\). The third assertion is the Lichnerowicz spectral gap theorem which can be found for graphs in [3] and for the more general graph connection Laplacians in [20]. Indeed, sharpness of one of the inequalities above implies sharpness of all other ones in a very precise way, as stated in the following theorem which will reappear as Theorem 3.4 and be proven there (Fig. 2).

A scheme of Theorem 2.1
Theorem 2.1
(Abstract CD-sharpness properties) Let \(G=(V,w,m)\) be a connected graph with \({\text {Deg}}_{\max }< \infty \) and satisfying \(CD(K,\infty )\) with \(K > 0\).
Let \(f\in C(V) \) be a function. The following are equivalent.
-
(1)
\(\Gamma P_t f = e^{-2Kt} P_t \Gamma f\).
-
(2)
\(f= \varphi +C\) for a constant C and an eigenfunction \(\varphi \) to the eigenvalue K of \(-\Delta \).
-
(3)
\(\Gamma _2 f = K \Gamma f\).
If one of the above statements holds true, we moreover have \(\Gamma f = const.\)
2.2 Hypercube shell structure
Unfortunately, sharp diameter bounds do not imply the graph to be a hypercube in the weighted case (see Sect. 4.3). But nevertheless, we can characterize diameter sharpness via a geometric property roughly stating that the graph has the same amount of edges between the spheres as the hypercube. This property is the following.
Definition 2.2
(Hypercube shell structure) We say that a weighted graph \(G=(V,w,m)\) has the hypercube shell structure \(HSS(N,W,x_0)\) with dimension \(N \in (0,\infty )\) and weight \(W \in (0,\infty )\) w.r.t. \(x_0 \in V\) if
-
(1)
G has constant vertex degree \({\text {Deg}}(x)=NW\) for all \(x\in V\),
-
(2)
G is bipartite,
-
(3)
\(d_-^{x_0}(x)=W\cdot d(x,x_0)\) for all \(x \in V\).
We say that a graph \(G=(V,w,m)\) has the hypercube shell structure HSS(N, W), if there exists \(x_0\), s.t. G has the the hypercube shell structure \(HSS(N,W,x_0)\).
Note that the HSS-condition implies finiteness. Intuitively, the hypercube shell structure determines the strength of the connection between vertices at distance d from \(x_0\) and shells, i.e., spheres of radius \(d-1\) around \(x_0\), but not between two certain vertices.
Example 2.3
It is straightforward to confirm that the unweighted N-dimensional hypercube has the hypercube shell structure \(HSS(N,1,x_0)\) for all \(x_0 \in V\).
We now state the announced equivalence of diameter sharpness and the hypercube shell structure (Fig. 3).

This is a scheme of Theorem 2.4. The box HSS is an abbreviation for the hypercube shell structure \(HSS(\frac{2D}{K},\frac{K}{2}, x_0)\)
Theorem 2.4
(Diameter sharpness for weighted graphs) Let \(G=(V,w,m)\) be a connected graph satisfying \(CD(K,\infty )\) for some \(K>0\). Let \(x_0 \in V\) and let \(f_0 := d(x_0,\cdot )\). Suppose \(D:={\text {Deg}}_{\max }<\infty \). The following are equivalent:
-
(1)
There exists \(y\in V\) s.t. \(d(x_0,y) = {\text {diam}}(G) = \frac{2D}{K}\).
-
(2)
\({\text {Deg}}(x_0)=D\) and \(\Gamma P_t f_0 = e^{-2Kt} P_t \Gamma f_0\).
-
(3)
\({\text {Deg}}(x_0)=D\) and \(f_0= \varphi +C\) for a constant C and an eigenfunction \(\varphi \) to the eigenvalue K of \(-\Delta \).
-
(4)
\({\text {Deg}}(x_0)=D\) and \(\Gamma _2 f_0 = K \Gamma f_0\).
-
(5)
G has the hypercube shell structure \(HSS\left( \frac{2D}{K},\frac{K}{2},x_0 \right) \).
The theorem will reappear as Theorem 4.1.
Indeed, there are graphs apart from the hypercube with hypercube shell structure \(HSS\left( \frac{2D}{K},\frac{K}{2},x_0 \right) \) satisfying \(CD(K,\infty )\). Examples are given in Corollary 4.9.
Based on the theorem, it seems natural to ask whether HSS by itself already implies positive curvature. But this turns out to be false (see Example 4.2).
The hypercube shell structure already determines the volume growth of the graph.
Proposition 2.5
Let \(G=(V,w,m)\) be a weighted graph satisfying \(HSS(N,W,x_0)\) for some \(x_0 \in V\). Then,
Proof
We first remark that by bipartiteness, one has \(d_-^{x_0}(y) + d_+^{x_0}(y) = {\text {Deg}}(y)\) for all \(y \in V\). Therefore, the hypercube shell structure \(HSS(N,W,x_0)\) implies
Hence,
which implies \(m(S_k(x_0)) = m(x_0){N \atopwithdelims ()k}\) via induction. This finishes the proof. \(\square \)
2.3 Constant edge degree
To characterize the hypercube, and not only the hypercube shell structure via diameter sharpness, we need a further assumption on the uniformity of the edge weight and vertex measure. This assumption is the constancy of the edge degree (see Definition 1.7).
We give a very basic characterization of constant edge degree which will be our further assumption to characterize the hypercube via diameter sharpness. One characterization refers to the unweighted representation which was defined in Definition 1.6.
Lemma 2.6
Let \(G=(V,w,m)\) be a weighted connected graph. Let \(\Delta \) be the Laplacian corresponding to G and let \({{\widetilde{\Delta }}}\) be the Laplacian corresponding to the unweighted representation \({\widetilde{G}}\) of G. Let \(q_0>0\). The following are equivalent.
-
(1)
G has constant edge degree \(q_0\).
-
(2)
\(m(x)=m_0=const\) and \(w(x,y) \in \{0,q_0 m_0\}\).
-
(3)
\(\Delta = q_0 {{\widetilde{\Delta }}}\).
Proof
Implications \(2 \Rightarrow 3\) and \(3 \Rightarrow 1\) are trivial. For proving \(1 \Rightarrow 2\), we observe that \(q(x,y)=q(y,x)=q_0\) for \(x \sim y\). This directly implies \(m(x)=m(y)\). Since G is connected, m must be constant on V which easily implies \(w(x,y) \in \{0,q_0 m_0\}\). \(\square \)
In the second assertion of the lemma, we see that a graph G with constant edge degree can be considered as a scaled variant of the unweighted representation \({\widetilde{G}}\) of G. We now investigate the compatibility between the scaling behavior of the edge degree, the curvature dimension inequality CD and the hypercube shell structure HSS.
Lemma 2.7
Let \(G=(V,w,m)\) be a graph with constant edge degree \(q_0\). Let \(K \in {{\mathbb {R}}}\) and \(n,D>0\) and let \(x_0 \in V\). Then,
-
(i)
G satisfies \(CD(q_0 K,n)\) if and only if \({\widetilde{G}}\) satisfies CD(K, n).
-
(ii)
G has the hypercube shell structure \(HSS(D,W,x_0)\) if and only if \(W=q_0\) and \({\widetilde{G}}\) has the hypercube shell structure \(HSS(D,1,x_0)\).
Proof
The first assertion of the lemma easily follows from the fact that a graph G with constant edge degree is a scaled version of its unweighted representation \({\widetilde{G}}\) and from the scaling behavior of the curvature dimension condition CD.
We finally prove the second assertion. Assume G satisfies \(HSS(D,W,x_0)\). Then for all \(y\sim x_0\), one has
This easily implies that \({\widetilde{G}}\) satisfies \(HSS(D,1,x_0)\). Vice versa, if \({\widetilde{G}}\) satisfies \(HSS(D,1,x_0)\) and if G has constant edge degree \(W=q_0\), then it is straight forward to see that G satisfies \(HSS(D,W,x_0)\). \(\square \)
If we want to characterize the hypercube via diameter sharpness, we need to assume a constant edge degree. Surprisingly, if, in contrast, we want to characterize the hypercube via eigenvalue sharpness, we get the hypercube shell structure HSS and a constant edge degree for free (Fig. 4):

A scheme of Theorem 2.8
Theorem 2.8
(Eigenvalue sharpness) Let \(G=(V,w,m)\) be a connected graph with \({\text {Deg}}_{\max }< \infty \) and satisfying \(CD(K,\infty )\) for some \(K>0\).
Suppose \(K=\lambda _{\deg _{\max }}.\)
Then, the following hold true.
-
1)
G satisfies \(HSS(\frac{2D}{K},\frac{K}{2},x_0)\) for arbitrary \(x_0 \in V\).
-
2)
G has constant edge degree.
This theorem will reappear as Theorem 4.3. In our view, the main achievement in this article is to prove the graph to be a hypercube assuming \(CD(K,\infty )\), the hypercube shell structure and a constant edge degree.
2.4 Small sphere property and non-clustering property
One key in our approach is to reduce Bakry–Émery’s curvature-dimension condition to the combinatorial properties given in Definition 2.9 below. We remind that \(d_-^x\) denotes the backwards-degree w.r.t x. For unweighted graphs, \(d_-^x(y)\) is the number of neighbors of y closer to x than y itself.
Definition 2.9
Let \(G=(V,E)\) be an unweighted D-regular graph, let \(K>0\) and let \(x \in V\).
-
(SSP) We say x satisfies the small sphere property (SSP) if
$$\begin{aligned} \#S_2(x) \le {D \atopwithdelims ()2}. \end{aligned}$$ -
(NCP) We say x satisfies the non-clustering property (NCP) if, whenever \(d_-^x(z) = 2\) holds for all \(z \in S_2(x)\), one has that for all \(y_1,y_2\in S_1(x)\) there is at most one \(z \in S_2(x)\) satisfying \(y_1\sim z \sim y_2\).
We say, G satisfies (SSP) or (NCP), respectively, if (SSP) or (NCP), respectively, are satisfied for all \(x \in V\).
We will show that both properties (SSP) and (NCP) follow from the curvature-dimension condition \(CD(2,\infty )\). Remark that unweighted hypercubes satisfy \(CD(2,\infty )\), and therefore as well (SSP) and (NCP).
Theorem 2.10
(Bakry–Émery-curvature, (SSP) and (NCP)) Let G=(V,E) be a D-regular bipartite graph satisfying \(CD(2,\infty )\) at some point \(x \in V\). Then x satisfies the small two-sphere property (SSP) and the non-clustering property (NCP).
This theorem reappears as Theorem 5.1. We point out the subtlety of (SSP) and (NCP) since already small changes of (NCP) affect our approach that it no longer works (see Lemma 5.8 and Fig. 8 below). However, appropriate use of the properties (SSP) and (NCP) defined above allows us to reduce diameter sharpness and eigenvalue sharpness to a purely combinatorial problem which can be solved by a tricky, but direct calculation as stated in the following theorem which will reappear as Corollary 6.3.
Theorem 2.11
Let \(G=(V,E)\) be a graph with the hypercube shell structure HSS(D, 1). Suppose, G satisfies (SSP) and (NCP). Then, G is isomorphic to the D-dimensional hypercube.
2.5 Hypercube characterization
Using the concepts explained above, we now characterize the hypercube in the weighted setting.
Theorem 2.12
(Main theorem) Let \(G=(V,w,m)\) be a finite weighted (i.e., without loops and multiple edges) connected graph. Let \(K>0\). Let \(x_0\) s.t. \(D:={\text {Deg}}(x_0)={\text {Deg}}_{\max }\). Let \(\deg _{max}\) be the maximal combinatorial degree, i.e. the maximal number of neighbors of a vertex and let \(0=\lambda _0<\lambda _1 \le \lambda _2 \le \cdots \) be the eigenvalues of the graph Laplacian \(-\Delta \), defined in (1.3) above. The following are equivalent:
-
(1)
G is a \(\frac{2D}{K}\)-dimensional hypercube with constant edge degree \(q=\frac{K}{2}\).
-
(2)
G satisfies \(CD(K,\infty )\) and \(\lambda _{\deg _{\max }} = {K}\).
-
(3)
G satisfies \(q=const.\) and \(CD(K,\infty )\), and \({\text {diam}}(G) = \frac{2D}{K}\).
-
(4)
G satisfies \(q=const.\), the hypercube shell structure \(HSS\left( \frac{2D}{K},\frac{K}{2}\right) \) and \(CD(K,\infty )\).
-
(5)
G has constant edge degree \(q=\frac{K}{2}\) and the unweighted representation \({\widetilde{G}}\) has the hypercube shell structure \(HSS\left( \frac{2D}{K}, 1\right) \) and satisfies (SSP) and (NCP).
A diagram of the proof is given in Fig. 5. We prove the main theorem under assumption of correctness of all previous results of this section. The correctness of the previous results is shown in the subsequent sections independently of the main theorem.

The figure is a scheme of the proof. The boxes usually stand for properties of G. It is mentioned explicitly if they stand for properties of \({\widetilde{G}}\). Every arrow has one or more input boxes which represent the assumptions, and output boxes which represent the conclusion of the corresponding theorem. E.g., the dotted arrow has input boxes ‘\(q=\frac{K}{2}\)’ and ‘\(\frac{2D}{K}\)-dimensional hypercube’, and output boxes ‘\(\lambda _{\deg _{\max }}=K\)’ and ‘\(CD(K,\infty )\)’ and ‘\({\text {diam}}=\frac{2D}{K}\)’
Proof of the main theorem
We first notice that the unweighted \(\frac{2D}{K}\)-dimensional hypercube satisfies \(CD(2,\infty )\), see [5, 15, 28]. By Lemma 2.7(i), we obtain that the \(\frac{2D}{K}\)-dimensional hypercube with constant edge degree \(q=\frac{K}{2}\) satisfies \(CD(K,\infty )\).
The implication 1 \(\Rightarrow \) 2 follows since the unweighted hypercube satisfies \(\lambda _{\deg _{\max }}=2\) and thus, for the hypercube with constant edge degree \(\frac{K}{2}\), we have \(\lambda _{\deg _{\max }}=K\).
Similarly, 1 \(\Rightarrow \) 3 follows since the \(\frac{2D}{K}\)-dimensional hypercube has diameter \({\text {diam}}(G)=\frac{2D}{K}\).
These implications are visualized by the dotted arrows in Fig. 5.
All other theorems, lemmata, corollaries and definitions we refer to in this proof are also shown in Fig. 5.
The implication 2 \(\Rightarrow \) 4 follows from Theorem 2.8 which is proven via spectral analytic methods, and the implication 3 \(\Rightarrow \) 4 follows from Theorem 2.4 which is proven via semigroup properties.
The implication 4 \(\Rightarrow \) 5 holds true since Lemma 2.7 implies that \({\widetilde{G}}\) satisfies \(HSS\left( \frac{2D}{K},1 \right) \), and that \(q=K/2\) and that \(\widetilde{G}\) satisfies \(CD(2,\infty )\), and therefore, by Definition 2.2 and Theorem 2.10, we obtain that \({\widetilde{G}}\) satisfies the small sphere property (SSP) and the non-clustering property (NCP).
The implication 5 \(\Rightarrow \) 1 holds true since Theorem 2.11 yields that \({\widetilde{G}}\), and thus G, are \(\frac{2D}{K}\)-dimensional hypercubes.
Putting together these implications yields the claim of the main theorem (Fig. 6). \(\square \)

The figure is a summary scheme of our results. The five equivalence arrows on the left only hold under the assumption of \(CD(K,\infty )\). The box HSS is an abbreviation for the hypercube shell structure \(HSS(\frac{2D}{K},\frac{K}{2}, x_0)\) introduced in Definition 2.2. The edge degree \(q\) is defined in Definition 1.7. The leftmost equivalence arrow \({\mathop {\Leftrightarrow }\limits ^{1}}\) (for \({\mathop {\Rightarrow }\limits ^{1}}\), see Theorem 2.8) reads as: ‘Assume \(CD(K,\infty )\) and \(x_0 \in V\). Then \(\lambda _{\deg _{\max }}=K\) is equivalent to \(q=const\) and \(d(x_0,y)=\frac{2D}{K}\) for some y.’ Both equivalence arrows in the middle, \({\mathop {\Leftrightarrow }\limits ^{3}}\) and \({\mathop {\Leftrightarrow }\limits ^{4}}\) (see Theorem 2.1) , should be interpreted as follows. Assuming \(CD(K,\infty )\), the equivalence between \(\Gamma _2 f = K\Gamma f\) and \(f=\varphi + C\) with \(-\Delta \varphi = K \varphi \) and \(\Gamma P_t f = e^{-2Kt} P_t \Gamma f\) holds for arbitrary f. In contrast, the equivalences \({\mathop {\Leftrightarrow }\limits ^{2}}\) and \({\mathop {\Leftrightarrow }\limits ^{5}}\) and (see Theorem 2.4) of, e.g., \(HSS(\frac{2D}{K},\frac{K}{2}, x_0)\) and \(\Gamma _2 f = K \Gamma f\) only hold for the special choice \(f:=d(x_0,\cdot )\). There are subtle methods involved to prove \({\mathop {\Leftrightarrow }\limits ^{6}}\), therefore this equivalence arrow is not covered by a single theorem
3 Sharp curvature dimension inequality
This section is dedicated to prove Theorem 2.1 which is the abstract characterization of CD-sharpness and Lemma 3.7 which connects eigenvalue sharpness with CD sharpness of the distance function and can be seen as the first part towards the proof of a discrete Obata theorem. The remaining parts to prove the Obata Theorem are provided in the sections below. The classical Obata rigidity theorem states that sharpness of Lichnerowicz eigenvalue bound is only attained for spheres. In the discrete setting, we prove that sharpness for the higher order eigenvalue bound is only attained for hypercubes, playing the role of a substitute for the sphere in the manifolds setting. We start giving the discrete Lichnerowicz eigenvalue bound (see [3, Theorem 2.1] or [20, Theorem 1.6]).
Theorem 3.1
(Lichnerowicz eigenvalue bound) Let \(G=(V,E)\) be a finite graph satisfying \(CD(K,\infty )\) for some \(K>0\). Let \(0=\lambda _0 \le \lambda _1 \le \cdots \) be the eigenvalues of \(- \Delta \). Then, \(\lambda _1 \ge K\).
Example 3.2
One is tempted to think that analogously to the Obata Sphere Theorem, sharpness of \(\lambda _1 \ge K\) is only attained for hypercubes. But this is not true. We have the following counter examples.
-
(1)
Let \(H_D\) the D-dimensional hypercube and let G be a graph satisfying \(CD(2,\infty )\). Then, the Cartesian product \(H_D \times G\) satisfies \(CD(2,\infty )\) (see, e.g., [21, Theorem 1.3]) and has first non-zero eigenvalue \(\lambda _1=2\).
-
(2)
Let G be a square with one diagonal. Then again, G satisfies \(CD(2,\infty )\) (as can be easily verified with the graph curvature calculator, see [6]) and has first non-zero eigenvalue \(\lambda _1=2\).
Hence, we need stronger assumptions to characterize the hypercube. The idea in this article is to assume \(\lambda _{{\text {Deg}}_{\max }}=K\) instead of the weaker condition \(\lambda _1=K\).
3.1 Geometric properties of eigenfunctions
The goal of this subsection is to prove Theorem 2.1 which is the abstract characterization of CD-sharpness. The crucial step to do so is to show that the distance function to some fixed point, up to some constant, is an eigenfunction to eigenvalue K.
The following lemma is crucial for the proof that an eigenfunction to the eigenvalue K is already uniquely determined by its values on a one-ball (see Lemma 3.5 below).
Lemma 3.3
Let \(G=(V,w,m)\) be a weighted graph, let \(x,z \in X\) with \(d(x,z)=2\) and let \( f:V \rightarrow {{\mathbb {R}}}\). Suppose
Then for all \(r\ne 0\), we have \(\Gamma _2 f(x) < \Gamma _2 \left( f+ r1_{\{z\}}\right) (x)\).
Proof
Let \(f_x\in \mathbb {R}^{\# B_2(x)}\) be the vector given by the restriction of the function \(f\) on \(B_2(x)\). Let \(\Gamma _2(x)\) be the \((\# B_2(x)) \times (\# B_2(x))\) symmetric matrix such that \(\Gamma _2 f(x)=f_x^\top \Gamma _2(x)f_x\). In fact, the column \(\Gamma _2(x)1_{\{z\}}\) of \(\Gamma _2(x)\) corresponding to a vertex \(z\in S_2(x)\) is given as follows (see [5, Section 2.3] and [5, Section 12]):
For any \(y \in S_1(x), (\Gamma _2(x))_{y,z} = - \frac{1}{2 m(x)} w(x,y)w(y,z)/m(y)\) if \(y \sim z\) and 0 otherwise; Finally, \((\Gamma _2(x))_{z',z}=0\) for any \(z' \in S_2(x)\) different from z. Therefore, we have
since
by assumption. This finishes the proof. \(\square \)
We denote the heat semigroup operator by \(P_t = e^{t\Delta }\) (for details see, e.g., [18, 21]) and prove Theorem 2.1 reappearing as the following theorem.
Theorem 3.4
(Abstract CD-sharpness properties) Let \(G=(V,w,m)\) be a connected graph with \({\text {Deg}}_{\max }< \infty \) and satisfying \(CD(K,\infty )\) with \(K > 0\).
Let \(f\in C(V) \) be a function. The following are equivalent:
-
(1)
\(\Gamma P_t f = e^{-2Kt} P_t \Gamma f\).
-
(2)
\(\Gamma _2 f = K \Gamma f\).
-
(3)
\(f= \varphi +C\) for a constant C and an eigenfunction \(\varphi \) to the eigenvalue K of \(-\Delta \).
If one of the above statements holds true, we moreover have
-
(a)
\(\Gamma f = const.\)
-
(a)
For all x, z with \(d(x,z)=2\), we have
$$\begin{aligned} \frac{f(z) + f(x)}{2} = \frac{\sum _{y:x\sim y\sim z} f(y){w(x,y)w(y,z)/m(y)}}{{\sum _{y:x\sim y\sim z} w(x,y)w(y,z)/m(y)}}. \end{aligned}$$(3.1)
Proof
We start proving \((1)\Rightarrow (2)\). We set \(F(s):=e^{-2Ks}P_s(\Gamma P_{t-s}f_0)(x_0)\). Observe that
We compute
Due to assertion 1 of the theorem and due to \(CD(K,\infty )\), we obtain
Hence, \(e^{-2Ks}P_s(2\Gamma _2P_{t-s}f_0-2K\Gamma P_{t-s}f_0)(x_0)=0\) for all \(s\in [0,t]\). In particular, this tells us that \(P_t(2\Gamma _2 f_0-2K\Gamma f_0)(x_0)=0\). Since \(\Gamma _2f_0-2K\Gamma f_0 \ge 0\), we conclude that \(\Gamma _2 f_0 \equiv K\Gamma f_0\) which proves assertion (2).
We prove \((2) \Rightarrow (3)\). Integrating yields
where \(\left\langle f, g \right\rangle := \sum _x f(x)g(x)m(x)\).
We spectrally decompose \(f_0 = \sum \alpha _i\varphi _i\) where \(\Delta \varphi _i = - \lambda _i \varphi _i\) with \(\left\langle \varphi _i,\varphi _j \right\rangle = \delta _{ij}\) and \(0=\lambda _0<\lambda _1 \le \cdots \).
Then, \(-K\left\langle f_0, \Delta f_0 \right\rangle = K\sum \ \lambda _i \alpha _i^2\) and \(\left\langle \Delta f_0, \Delta f_0 \right\rangle = \sum \ \lambda _i^2 \alpha _i^2\).
Applying (3.2) yields
The Lichnerowicz Theorem 3.1 yields \(\lambda _1\ge K\) [20, Theorem 1.6]) and thus, \(\lambda _i \left[ \lambda _i - K \right] \ge 0\) for all \(i\ge 0\).
Therefore, all terms of \(\sum _i \lambda _i \left[ \lambda _i - K \right] \alpha _i^2\) need to zero which implies \(\alpha _i=0\) whenever \(\lambda _i \notin \{0,K\}\). Thus, we can write \(f_0 = C + \varphi \) with \(\Delta \varphi = -K\varphi \) and constant C.
We prove \((3) \Rightarrow (a)\) which will be used later to prove \((3) \Rightarrow (1)\). Due to \(CD(K,\infty )\), we have
Thus, \(\Delta \Gamma \varphi \ge 0\) which implies \(\Delta \Gamma \varphi = 0\) since \(\langle \Delta g,1 \rangle = 0\) for all functions \(g:V\rightarrow {{\mathbb {R}}}\). Since eigenvalue zero has multiplicity one due to connectedness, we see that \(\Gamma \varphi = \Gamma f\) must stay constant.
We now prove \((3) \Rightarrow (1)\). Since \(\varphi \) is an eigenfunction, we have \(P_t \varphi = e^{-Kt} \varphi \). Since f and \(\varphi \) only differ by a constant, we obtain
We proved already \((3) \Rightarrow (a)\) which means that \(\Gamma \varphi = const.\) and thus, \(\Gamma \varphi = \Gamma f = P_t \Gamma f\). We conclude
We finally prove \((2)\Rightarrow (b)\). We start with \(\Gamma _2 f = K \Gamma f\). If there were \(x,z \in V\) with \(d(x,z) = 2\) and (3.1) violated, then we could change f into g by changing it only in z such that g satisfies (3.1) for the pair \(x,z \in V\). Since f and g agree on \(B_1(x)\), we have \(\Gamma f(x) = \Gamma g(x)\) and \(\Gamma _2 g(x) < \Gamma _2 f(x)\) due to Lemma 3.3. Then we have \(\Gamma _2 g(x) < \Gamma _2 f(x) = K \Gamma f(x) = K \Gamma g(x)\), violating the assumption that G is \(CD(K,\infty )\). \(\square \)
The next lemma states that if we know an eigenfunction on a one-ball, we know it everywhere.
Lemma 3.5
Let \(G=(V,w,m)\) be a connected graph with \({\text {Deg}}_{\max }< \infty \) and satisfying \(CD(K,\infty )\) with \(K > 0\). Let \(x\in V\). Suppose \(\varphi _1,\varphi _2\) are eigenfunctions to eigenvalue K. Suppose furthermore \(\varphi _1|_{B_1(x)}=\varphi _2|_{B_1(x)}\). Then, \(\varphi _1 \equiv \varphi _2\).
Proof
We prove via induction over the spheres. Due to the above theorem, \(\varphi _i(z)\) is uniquely determined for \(z \in S_{k+1}(x)\) whenever we know \(\varphi _i(y)\) for all \(y \in B_k\) with \(k \ge 1\). In particular, \(\varphi _1(z)=\varphi _2(z)\) for all \(z \in S_{k+1}(x)\) if we assume \(\varphi _1|_{B_k(x)} = \varphi _2|_{B_k(x)}\). \(\square \)
The next lemma tells us that due to high multiplicity, for any given function, there exists an eigenfunction to eigenvalue K which coincides with the given function locally. We recall that the combinatorial degree of a vertex \(x\in V\) is given by \(\deg (x) =\#\{y:y\sim x\}\). We write \(\deg _{\max }:=\max _{x\in V}\deg (x)\).
Lemma 3.6
Let \(G=(V,E)\) be a finite graph satisfying \(CD(K,\infty )\) for some \(K>0\). Let \(x \in V\) and suppose \(\lambda _{\deg (x)} = K\). Let \(f:V \rightarrow {{\mathbb {R}}}\) be a function with \(\Delta f(x) = -Kf(x)\) at point x. Then, there exists an eigenfunction \(\varphi \) to eigenvalue K s.t. \(\varphi |_{B_1(x)} = f|_{B_1(x)}\).
Proof
This follows from a dimension argument. Let \(\Phi :=\{\varphi :\Delta \varphi = - K \varphi \}\) be the eigenspace to the eigenvalue K. By assumption, \(\dim \Phi \ge \deg (x)\). Let \(\Phi |_{B_1(x)} := \{\varphi |_{B_1(x)}:\Delta \varphi = - K \varphi \}\) be the eigenspace restricted to \(B_1(x)\). Due to Lemma 3.5, the map \(\Phi \rightarrow \Phi |_{B_1(x)}\) via \(\varphi \mapsto \varphi |_{B_1(x)}\) is an injective linear transformation and thus, \(\dim \Phi |_{B_1(x)} \ge \dim \Phi \). Moreover, \(\Phi |_{B_1(x)}\) is subspace of \(\Psi _{B_1(x)}:=\{g: B_1(x)\rightarrow {{\mathbb {R}}}: \Delta g(x) = Kg(x)\}\) which has dimension \(\#B_1(x)-1 = \deg (x)\). We conclude
In particular, \(\dim \Phi =\dim \Psi |_{B_1(x)}\) and hence, the map \( \Phi \rightarrow \Psi _{B_1(x)}\) via \(\varphi \mapsto \varphi |_{B_1(x)}\) is surjective since we already know injectivity. For given f with \(\Delta f(x) =-Kf(x)\), we have that \(f|_{B_1(x)} \in \Psi |_{B_1(x)}\). Due to surjectivity discussed before, there is \(\varphi \in \Phi \) satisfying \(\varphi |_{B_1(x)} = f|_{B_1(x)}\) as desired. \(\square \)
We use the above lemma to prove that, assuming high multiplicity of eigenvalue K, one can conclude sharpness of the \(CD(K,\infty )\) inequality for the distance function.
Lemma 3.7
Let \(G=(V,w,m)\) be a finite connected graph satisfying \(CD(K,\infty )\) for some \(K>0\). Let \(x_0 \in V\). Suppose \(\lambda _{\deg _{\max }}=K.\) Then, \(\Gamma _2 f = K \Gamma f\) with \(f= d(x_0,\cdot )\).
Proof
Let \(\psi :V\rightarrow {{\mathbb {R}}}\) be given by \(\psi (y):= d(x_0,y) - D/K\) with \(D = {\text {Deg}}(x_0)\). Then, \(-\Delta \psi (x_0) = -D = K\psi (x_0)\). Hence by Lemma 3.6, there is an eigenfunction \(\varphi \) to eigenvalue K s.t. \(\varphi |_{B_1(x_0)} = \psi |_{B_1(x_0)}\). Due to Theorem 3.4, we have
for all x, z with \(d(x,z)=2\). Since the same equation holds for \(\psi \) whenever \(d(z,x_0) = 2+d(x,x_0)\), we conclude \(\varphi = \psi \). Since \(\Gamma _2\) and \(\Gamma \) are invariant under adding constants and due to Theorem 3.4, this implies \(\Gamma _2 d(x_0,\cdot )=\Gamma _2 \psi = K\Gamma \psi = K\Gamma d(x_0,\cdot )\). This finishes the proof. \(\square \)
3.2 An upper bound for the multiplicity of the eigenvalue K
The methods above have shown that eigenfunctions to the eigenvalue K are already uniquely determined by its values on a one-ball. We will use a simple dimension argument to obtain an upper bound for the multiplicity of the eigenvalue K.
Theorem 3.8
Let \(G = (V,w,m)\) be a connected graph with \({\text {Deg}}_{\max }< \infty \) and satisfying \(CD(K,\infty )\) for some \(K > 0\). Then we have \(\lambda _1 \ge K\) and, if K is an eigenvalue of \(-\Delta \), then its multiplicity is at most \(\min _{x \in V} \mathrm{{deg}}(x)\).
Proof
We first observe that G is finite due to the diameter bound (see [19, Corollary 2.2]). The inequality \(\lambda _1 \ge K\) follows from Lichnerowicz inequality (see [3, Theorem 2.1] or [20, Theorem 1.6]).
We now prove the upper bound of the multiplicity. Let \(x \in V\) for which we have \(\mathrm{{deg}}(x) = \min _{y \in V} \mathrm{{deg}}(y)\). Due to Lemma 3.5, the eigenfunctions to the eigenvalue K are uniquely determined by the values on the 1-ball \(B_1(x)\). Using the subspace \(\Phi \vert _{B_1(x)}\) introduced in the proof of Lemma 3.6, we know its dimension is equal to the multiplicity of the eigenvalue K. On the other hand, we have \(\Phi \vert _{B_1(x)} \subseteq {{\mathbb {R}}}^{B_1(x)}\) and \(\Phi \vert _{B_1(x)}\) does not contain any constant vectors. Therefore, this vector space must have dimension at most \({\#B_1(x) - 1 = \textrm{deg}}(x)\). This finishes the proof. \(\square \)
Remark 3.9
We will show in Sects. 5 and 6 that multiplicity equals \(\mathrm{{deg}}_{\max }\) implies that G is the D-dimensional hypercube. It is an interesting question whether, for given \(1 \le k < \mathrm{{deg}}_{\max }\), there is also a characterization of all connected graphs with \({\text {Deg}}_{\max }<\infty \) and satisfying \(CD(K,\infty )\).
4 Sharp curvature estimates and the distance function
This section is dedicated to prove both, Theorem 2.4 which can be seen as part of a discrete Cheng theorem, and Theorem 2.8 which can be seen as part of a discrete Obata theorem, presenting diameter or eigenvalue conditions which lead to the same shell structure as the hypercube. Moreover, we explain the necessity of the assumption of an constant edge degree for our discrete Cheng theorem in Sect. 4.3. Semigroup methods allow us to investigate the behavior of the distance function \(f_0 = d(x_0,\cdot )\). In particular, we will be able to recover coarse sphere structures from diameter sharpness, i.e., the size of every sphere and the in- and outgoing degrees of the vertices. In other words, we will know for every vertex to how many vertices in the next sphere it is connected, but we do not know to which ones. So in order to establish the full discrete versions of the Cheng and Obata theorems, we will need further investigations carried out in Sects. 5 and 6 and to prove Theorem 2.11.
4.1 Diameter sharpness
We now study sharpness of the diameter bound obtained in [19, Corollary 2.2] via semigroup methods. The following theorem is the restatement of Theorem 2.4.
Theorem 4.1
(Diameter sharpness for weighted graphs) Let \(G=(V,w,m)\) be a connected graph satisfying \(CD(K,\infty )\) for some \(K>0\). Let \(x_0 \in V\) and let \(f_0 := d(x_0,\cdot )\). Suppose \(D:={\text {Deg}}_{\max }<\infty \). The following are equivalent:
-
(1)
There exists \(y_0\in V\) s.t. \(d(x_0,y_0) = {\text {diam}}(G) = \frac{2D}{K}\).
-
(2)
\({\text {Deg}}(x_0)=D\) and \(\Gamma P_t f_0 = e^{-2Kt} P_t \Gamma f_0\).
-
(3)
\({\text {Deg}}(x_0)=D\) and \(\Gamma _2 f_0 = K \Gamma f_0\).
-
(4)
\({\text {Deg}}(x_0)=D\) and \(f_0= \varphi +C\) for a constant C and an eigenfunction \(\varphi \) to the eigenvalue K of \(-\Delta \).
-
(5)
G has the hypercube shell structure \(HSS\left( \frac{2D}{K},\frac{K}{2},x_0 \right) \).
In Corollary 4.9, we will give an example of graphs apart from the hypercube which satisfy the assertions of the theorem. Before proving the theorem, we construct an example with the hypercube shell structure which does not have any positive curvature bound.
Example 4.2
(Hypercube shell structure and non-positive curvature) The unweighted graph given in Fig. 7 obviously satisfies HSS(4, 1, x). However, the punctured two-ball \(\mathring{B}_2(x)\) is not connected, and due to [5, Theorem 6.4], this implies that \(CD(0,\infty )\) is not satisfied at vertex x.

The graph satisfies HSS(4, 1, x) but it has negative Bakry–Émery curvature at vertex x
Proof of Theorem 4.1
We recall that the hypercube shell structure \(HSS\left( \frac{2D}{K},\frac{K}{2},x_0 \right) \) means
-
a)
G is D-regular w.r.t \({\text {Deg}}\) defined in (1.2),
-
b)
G is bipartite,
-
c)
\(d_-^{x_0}(x) = \frac{K}{2} d(x,x_0)\) for all \(x \in V\).
First, we prove \(1 \Rightarrow 2\). We remark that G is finite due to finite (combinatorial) diameter [19, Corollary 2.2], bounded above by \(\frac{2D}{K}\). Let \(f_0(\cdot ):=d(x_0,\cdot ): V\rightarrow \mathbb {R}\). Similar to the proof of [19, Theorem 2.1], we have \(|\Delta g| \le \sqrt{2 {\text {Deg}}_{\max }\Gamma g}\) and therefore,
Hence, we have equality in every step of the calculation. Due to sharpness of (4.2), we have
for all \(t \ge 0\). Due to sharpness of (4.1), we have \({\text {Deg}}(x_0)={\text {Deg}}_{\max }=D\) which proves assertion 2 of the theorem.
The equivalence of statements 2, 3, and 4 of the theorem follows from Theorem 3.4.
We prove \(4 \Rightarrow 5\). We first prove D-regularity and bipartiteness. By Theorem 3.4(a), we have for all \(x \in V\) that \(\Gamma f_0 (x) = const. = \Gamma f_0(x_0) = D/2\). Hence for all \(x \in V\),
Since we always have \({\text {Deg}}(x) \le {\text {Deg}}_{\max }\), Eq. (4.3) implies \({\text {Deg}}(x)={\text {Deg}}_{\max }\) and there is no \(y \sim x\) with \(f_0(x) = f_0(y)\), i.e. there are no edges within the spheres \(S_k{(x_0)}\). This proves D-regularity and bipartiteness since bipartiteness is equivalent to having no edges within the spheres around a fixed vertex.
We calculate how \(f_0\) decomposes into an eigenfunction \(\varphi \) and a constant C. We have
Thus, \(C=f_0(x_0) - \varphi (x_0) = D/K\) which implies \(\Delta f_0 = \Delta \varphi = -K\varphi = D - Kf_0\).
Due to D-regularity and bipartiteness, we have \(d_-^{x_0}(x) + d_+^{x_0}(x)=D\) for all \(x \in V\). On the other hand since \(\Delta f_0 = D - Kf_0\), we obtain
Subtracting the latter equation from \(d_-^{x_0}(x) + d_+^{x_0}(x)=D\) yields \(2d_-^{x_0}(x) = Kd(x,x_0)\) which proves c) of the hypercube shell structure and thus assertion 5 of the theorem.
We continue proving \(5 \Rightarrow 1\). Due to HSS, we have \(d_+^{x_0}(x)=D-d_-^{x_0}(x)= D- \frac{K}{2} d(x,x_0) >0\) whenever \(d(x,x_0)< \frac{2D}{K}\). Hence, there exists \(y \in V\) with \(d(y,x_0) > d(x,x_0)\) as soon as \(d(x,x_0)< \frac{2D}{K}\). By induction principle there exists \(y_0\in V\) s.t. \(d(x_0,y_0)=\frac{2D}{K}\) which proves assertion 1 of the theorem. \(\square \)
4.2 Eigenvalue sharpness
In this subsection, we prove Theorem 4.3 which states that sharpness of the Lichnerowicz eigenvalue estime or the first \(\deg _{\max }\) non-trivial eigenvalues implies the hypercube shell structure and constant edge degree. For the definition of constant edge degree, see Definition 1.7.
We now restate Theorem 2.8 for convenience and provide the proof.
Theorem 4.3
(Eigenvalue sharpness) Let \(G=(V,w,m)\) be a connected graph with \({\text {Deg}}_{\max } < \infty \) satisfying \(CD(K,\infty )\) for some \(K>0\).
Let \(x_0 \in V\). Suppose \(\lambda _{\deg _{\max }}=K.\)
Then, the following hold true.
-
(1)
G satisfies \(HSS(\frac{2D}{K},\frac{K}{2},x_0)\) for arbitrary \(x_0 \in V\).
-
(2)
G has constant edge degree.
Proof
We start proving (1). We observe that Lemma 3.7 yields \(\Gamma _2 f_0 = K\Gamma f_0\) with \(f_0=d(x_0,\cdot )\).
Therefore, assertion (3) of Theorem 4.1 holds true when choosing \(x_0\) s.t. \({\text {Deg}}(x_0)\) is maximal. Now we apply \((3)\Rightarrow (5)\) of Theorem 4.1 and conclude that G satisfies \(HSS(\frac{2D}{K},\frac{K}{2},x_0)\). The hypercube shell structure (Definition 2.2) implies that G has constant vertex degree and, therefore, assumption (3) and property (5) of Theorem 4.1 holds true for choosing \(x_0\) arbitrary. This finishes the proof of 1).
Next, we prove 2). Recall from Lemma 2.6 that a connected graph \(G=(V,w,m)\) has constant edge degree \(q_0\) iff there exist global \(m,w>0\) s.t. \(w(x,y) \in \{0,w\}\) and \(m(x)=m\) for all \(x,y \in V\) and if \(q_0=w/m\).
We first prove that m is constant. Suppose this is not the case. Due to connectedness of G, there exist \(x\sim y\) s.t. \(m(x)>m(y)\). Let \(f:V \rightarrow {{\mathbb {R}}}\) be a function s.t. \(f(z)=1\) for all \(z \ne y\) and s.t. \(\Delta f(x) = -K\), that is, \(f(y) = 1 - Km(x)/w(x,y) \ne 1\). By Lemma 3.6, there exists an eigenfunction \(\varphi \) to the eigenvalue K s.t. \(\varphi (z)=f(z)\) for \(z \in B_1(x)\). Hence,
By Theorem 3.4(a), the gradient \(\Gamma \varphi \) is constant and by assumption, one has \(m(x)>m(y)\), and thus,
This is a contradiction to (4.5) and hence m is constant.
Now suppose G has no constant edge degree. By connectedness of G, this implies that there exists x and \(y_i\sim x\) for \(i=1,2\) with \(w(x,y_1)\ne w(x,y_2)\). We know from assertion 1) of the theorem that \(HSS(\frac{2D}{K},\frac{K}{2}, x)\), and in particular, using property (3) of the hypercube shell structure (Definition 2.2)
where the first and the third equality follow from \(x\sim y_i\) for \(i=1,2\). Thus, \(w(x,y_1)=w(x,y_2)\) which is a contradiction. We conclude that G has constant edge degree. \(\square \)
4.3 The necessity of a constant edge degree assumption
For the weighted case, one could hope that, whenever a weighted graph satisfies \(CD(K,\infty )\) and \({\text {diam}}(G)=\frac{2{\text {Deg}}_{\max }}{K}\), the graph has to be a hypercube. But that is not true in general. In this subsection, we give counter examples. To do so, we give a method to transfer spherically symmetric graphs into linear graphs, i.e., weighted graphs with the adjacency of \({\mathbb {N}}\) (see [14]). This transfer preserves Bakry–Émery curvature and therefore, the linear graph corresponding to the hypercube \(H_D\) still satisfies \(CD(2,\infty )\) and has diameter D. Using this method, we show that the main theorem fails without the assumption of constant edge degrees. We start giving examples with sharp diameter bounds According to [14], we define weak spherical symmetry.
Definition 4.4
We call a graph \(G=(V,w,m)\) weakly spherically symmetric w.r.t. a root \(x_0 \in V\) if for all y, z with \(d(y,x_0)=d(z,x_0)\) holds
Definition 4.5
Let \(G=(V,w,m)\) be a graph. Let \(x_0 \in V\) and let \(G_P^{x_0}= (V_G^{x_0}, w_G^{x_0},m_G^{x_0})\) be given by \(V_G^{x_0} := \{0,\ldots ,\sup _y d(x_0,y)\}\) and
and
We define \(P_G^{x_0} : C(V_G^{x_0}) \rightarrow C(V)\) via \( \left( P_G^{x_0} f \right) (x) := f(d(x,x_0))\) for all \(x \in V\).
The following lemma is in the spirit of [14, Lemma 3.3].
Lemma 4.6
Let \(G=(V,w,m)\) be a weakly spherically symmetric graph. Then for all \(f \in C(V_G^{x_0})\), we have \(P_G^{x_0} \Delta f = \Delta P_G^{x_0} f\).
Proof
Let \(f \in C(V_G^{x_0})\), let \(x \in V\) and let \(n:=x_G^{x_0} := d(x,x_0) \in V_G^{x_0}\). Then since \(d_-,d_+\) and m are constant on \(S_n(x_0)\), we have
This finishes the proof. \(\square \)
We now show that the map \(G \mapsto G_P^{(x_0)}\) is curvature preserving if G is weakly spherically symmetric w.r.t. \(x_0\).
Corollary 4.7
Let \(G=(V,w,m)\) be a weakly spherically symmetric graph. Suppose G satisfies CD(K, d) for some K, d. Then, \(G_P^{x_0}\) also satisfies CD(K, d).
Proof
Obviously for \(f,g \in C(V_G^{x_0})\), we have
Together with Lemma 4.6, we obtain
To abuse notation, we write \(\Delta ^2f:=(\Delta f)^2\). Since G satisfies CD(K, d), we have
Since \(P_G^{x_0} g\) is positive if and only if g is positive, we obtain
which proves that \(G_P^{x_0}\) satisfies CD(K, d). \(\square \)
The following lemma gives an explicit representation of \({(H_D)}_P^{x_0}\).
Lemma 4.8
The hypercube \(H_D\) is weakly spherically symmetric w.r.t any \(x_0 \in V\) and \((H_D)_P:={(H_D)}_P^{x_0} = (\{0,\ldots ,D\},w_D,m_D)\) with
Proof
We write \(H_D=(V,w,m)\). We have \(m_D(k)=m(S_k(x_0)) = \# S_k(x_0)= {D \atopwithdelims ()k}\) for \(k=0,\ldots D\). Moreover, for every vertex \(x \in S_k\) there are exactly \(D-k\) edges between x and \(S_{k+1}\). Thus, \(d_+(x) = D-k\) and
Moreover for \(x \in S_k(x_0)\), we have \(m(x)=1\) and \(d_+(x)=D-k\) and \(d_-(x)=k\) which proves weak spherical symmetry of \(H_D\). \(\square \)
Now, we can give examples of graphs with hypercube shell structures which are not hypercubes.
Corollary 4.9
The graph \({(H_D)}_P\) satisfies \(CD(2,\infty )\) and \({\text {Deg}}_{\max }=D = {\text {diam}}(x_0)\). Moreover, \({(H_D)}_P^{x_0}\) has the hypercube shell structure HSS(D, 1).
Proof
Combining Lemma 4.8 and Corollary 4.7 with the fact that \(H_D\) satisfies \(CD(2,\infty )\) yields that \({(H_D)}_P\) satisfies \(CD(2,\infty )\). Obviously, \({(H_D)}_P\) has diameter D since the hypercube \(H_D\) has. Theorem 4.1 yields that \({(H_D)}_P\) has the hypercube shell structure HSS(D, 1). \(\square \)
The corollary implies that property (2.12) in the main theorem (Theorem 2.12) is satisfied for \({(H_D)}_P^{x_0}\) except for the constant edge degree \(q\) (see Definition 1.7), but \({(H_D)}_P^{x_0}\) is no hypercube for \(D>1\). I.e., the discrete Cheng theorem (Theorem 2.12) fails if we drop the constant edge degree assumption. Remark that \({(H_D)}_P^{x_0}\) corresponds to the discrete Ornstein–Uhlenbeck process up to normalization.
5 A combinatorial approach to Bakry–Émery curvature
From Theorem 4.3 and Theorem 4.1, we know about coarse structures of the graph. Unfortunately, our semigroup approach cannot distinguish between vertices within the same sphere due to spherical symmetry of \(f_0 =d(x_0,\cdot )\). E.g., our semigroup methods cannot see if we replace two edges \((y_1,z_1)\) and \((y_2,z_2)\) by edges \((y_1,z_2)\) and \((y_2,z_1)\) for \(y_i \in S_k(x_0)\) and \(z_i \in S_{k+1}(x_0)\) and \(i=1,2\). To have deeper insight into the edge structure between the spheres, we use combinatorial arguments derived from methods in [5].
5.1 Small sphere property and non-clustering property
We recall the definition of (SSP) and (NCP). Let \(G=(V,E)\) be a D-regular graph and let \(x \in V\).
-
(SSP) We say x satisfies the small sphere property (SSP) if
$$\begin{aligned} \#S_2(x) \le {D \atopwithdelims ()2} \end{aligned}$$ -
(NCP) We say x satisfies the non-clustering property (NCP) if, whenever \(d_-^x(z) = 2\) holds for all \(z \in S_2(x)\), one has that for all \(y_1,y_2\in S_1(x)\) there is at most one \(z \in S_2(x)\) satisfying \(y_1\sim z \sim y_2\).
We now show that both properties follow from \(CD(2,\infty )\) as announced in Theorem 2.10.
Theorem 5.1
(Restatement of Theorem 2.10) Let G=(V,E) be a D-regular bipartite graph satisfying \(CD(2,\infty )\) at some point \(x \in V\). Then, x satisfies the small sphere property (SSP) and the non-clustering property (NCP).
Remark 5.2
Let \(x \in V\). Assume \(d_-^x(z) = 2\) for all \(z \in S_2(x)\). Assume further that x satisfies (NCP) and that there is no edge between any two vertices from \(S_2(x)\). Then, we can conclude that \(B_2(x)\) is isomorphic to the 2-ball of any vertex in the D-dimensional hypercube.
For the proof of the theorem, we use [5, Theorem 8.1 and Proposition 8.9]. For convenience, we recall those results in the current setting. Let \(G=(V,E)\) be an unweighted D-regular graph without triangles and \(x\in V\). Let \(S_1''(x)\) be the graph with vertex set \(\{y_i\sim x, i=1,2,\ldots , D\}\) and an edge between \(y_i\) and \(y_j\) if and only if there exists \(z\in S_2(x)\) such that \(y_i\sim z\sim y_j\). We assign the following edge weights \(w''(y_i,y_j)\) on the edges of \(S_1''(x)\):
Consider the following Laplacian
We refer to their eigenvalues \(\lambda \) as solutions of \(\Delta _{S_1''(x)}f+\lambda f=0\) and list them with their multiplicity by
Theorem 5.3
[5] Let \(G=(V,E)\) be an unweighted D-regular graph without triangles, \(D\ge 2\). Let \(x\in V\) and \(\Delta _{S_1''(x)}\) be the Laplacian defined as above. Then we have
-
1)
The vertex x satisfies \(CD(2,\infty )\) if and only if \(\lambda _1(\Delta _{S_1''(x)})\ge \frac{D}{2}\).
-
2)
\(\# S_2(x)\le (D-1)(D-\lambda _1(\Delta _{S_1''(x)}))\).
Remark 5.4
Theorem 5.3 follows as a special cases of [5, Theorem 8.1] and [5, Proposition 8.9] . Note first that D-regularity and triangle-freeness implies that every vertex x of G is \(S_1\)-out regular (i.e., the out-degrees \(d_+^y\) of all \(y \sim x\) are the same and agree with \(av_1^+(x)\)). In this case, it is stated in [5, Theorem 8.1] that the eigenvalue estimate is equivalent to \(\infty \)-curvature sharpness and, via the explicit formula of the curvature function, equivalent to \(CD(2,\infty )\), since \((3+D-av_1^+(x))/2=2\).
We also need the following lemma.
Lemma 5.5
Let \(X=(x_{ij})\in \text {Sym}(r,\mathbb {R})\) be an \(r \times r\) symmetric real matrix with
-
1)
\(x_{ij}\ge 0\), for any \(i\ne j \in [r]\).
-
2)
\(x_{ii}=-\sum _{j\ne i}x_{ij}\).
Assume that its eigenvalues (i.e., solutions of \(Xf+\lambda f=0\)) can be listed with their multiplicity as
Then we have
where the equality holds if and only if \(x_{ij}=-\frac{\textrm{Tr}(X)}{r(r-1)}\) for any \(i\ne j\).
Proof
W.l.o.g., we assume \(-\textrm{Tr}(X)>0\). Since \(-\textrm{Tr}(X)=\sum _{\ell =0}^{r-1}\lambda _\ell \ge (r-1)\lambda _1\), we have \(\lambda _1\le -\frac{\textrm{Tr}(X)}{r-1}\). The equality implies that \(\lambda _1=\lambda _2=\cdots =\lambda _{r-1}=-\frac{\textrm{Tr}(X)}{r-1}\). Since the eigenspace to \(\lambda _0=0\) is spanned by constant vectors, every \(f\in \mathbb {R}^r\) orthogonal to constant vectors is an eigenvector of X to the eigenvalue \(-\frac{\textrm{Tr}(X)}{r-1}>0\). It is sufficient to show for any three distinct \(i,k,\ell \in [r]\) that \(x_{ik}=x_{i\ell }\). Choose \(f=e_k-e_\ell \) which is vertical to constant vectors. Then we have \((Xf)_i=x_{ik}-x_{i\ell }=-\frac{\textrm{Tr}(X)}{r-1}f_i=0\). \(\square \)
Proof of Theorem 5.1
Since x satisfies \(CD(2,\infty )\), we obtain \(\# S_2(x) \le {D \atopwithdelims ()2}\) by combining 1) and 2) of Theorem 5.3. I.e., x satisfies (SSP).
We now prove (NCP). Note that there are \(D(D-1)\) edges between \(S_1(x)\) and \(S_2(x)\). Since \(d_-^x(z)=2\) for any \(z\in S_2(x)\), we conclude \(\# S_2(x) = \frac{D(D-1)}{2}={D \atopwithdelims ()2}\). Observe that \(\Delta _{S_1''(x)}=:X=(x_{ij})\in \textrm{Sym}(D,\mathbb {R})\) with \(x_{ij}\ge 0\) for all \(i\ne j\) and \(x_{ii}=-\sum _{j\ne i}x_{ij}\). Moreover, by the construction of \(\Delta _{S_1''(x)}\), we have
since each edge in \(S_1''(x)\) contributes a weight 1/2 and \(S_1''(x)\) has \(D \atopwithdelims ()2\) edges in total. Therefore, we have \(-\textrm{Tr}(X)=\sum _{i\in [D]}\sum _{j\ne i} x_{ij}={D \atopwithdelims ()2}\). Applying Lemma 5.5, we obtain \(\lambda _1(\Delta _{S_1''(x)})\le \frac{D}{2}\). Furthermore, we have by 1) of Theorem 5.3 that \(\lambda _1(\Delta _{S_1''(x)})\ge \frac{D}{2}\). Hence the equality holds and we have \(x_{ij}=\frac{1}{2}\) for any \(i\ne j\) by Lemma 5.5. That is, for any two vertices \(y_i,y_j\in S_1(x)\), there is exact one \(z\in S_2(x)\) satisfying \(y_i\sim z\sim y_j\). This proves (NCP). \(\square \)
Remark 5.6
By Theorem 5.1, we directly obtain 2.12 \(\Rightarrow \) 2.12 from the main theorem (Theorem 2.12).
5.2 The subtleties
In the following, we demonstrate that already little changes in (NCP) have the consequence that our method no longer works.
Example 5.7
One might be tempted to replace (NCP) by the stronger (NCP2) stating that whenever \(\#S_2(x) = {D \atopwithdelims ()2}\), we obtain that for all \(y_1,y_2\) there is at most one \(z \in S_2(x)\) s.t. \(y_1 \sim z \sim y_2\). But unfortunately, \(CD(2,\infty )\) does not imply (NCP2) as one can see in Fig. 8 and in the following Lemma 5.8. This demonstrates the subtleties of finding a suitable interface between Bakry–Émery-curvature and a combinatorial characterization of the hypercube.
Lemma 5.8
The unweighted graph given in Fig. 8 satisfies \(CD(2,\infty )\) at point x.
Proof
Since the vertex x is \(S_1\)-out regular, that is, each vertex in \(S_1(x)\) has the same out-degree, we can apply [5, Theorem 9.1]. Observe in this example we have \(S_1''(x)\) is the complete graph with 4 vertices, and \(w''(y_i,y_j)=\frac{1}{2}\) for any \(y_i,y_j \in S_1(x)\). Therefore, we have \(\lambda _1(\Delta _{S_1''(x)})=2=\frac{\textrm{Deg}(x)}{2}\). By [5, Theorem 9.1], we conclude x satisfies \(CD(2,\infty )\). \(\square \)

Lemma 5.8 proves that this unweighted graph satisfies \(CD(2,\infty )\). Moreover, the graph is bipartite and \(B_1(x)\) is D-regular with \(D=4\). Obviously, \(\# S_2(x) = 6 = {D \atopwithdelims ()2}\). I.e., x satisfies all preconditions of (NCP2). But x does not satisfy (NCP2)
6 A combinatorial characterization of the hypercube
The aim of this section is to prove Theorem 2.11 which states that the hypercube shell structure HSS(D,1) together with the small sphere property (SSP) and the non-clustering property (NCP) imply that the graph is a hypercube. To prove the theorem, we need some preparation.
6.1 A power set lemma
The following lemma will give that every two-sphere \(S_2(z)\) around \(z \in S_{k+1}(x_0)\) contains at least \({k+1 \atopwithdelims ()2}\) vertices in \(S_{k-1}(x_0)\) if we assume that \(B_k{(x_0)}\) is isomorphic to a corresponding ball in a hypercube, see (6.7).
For sets X and \(k \in {\mathbb {N}}\), we write \(\mathcal P_k(X) := \{A \subset X: \# A = k\}\) and \(\mathcal P_{\le k}(X) := \{A \subset X: \# A \le k\}\).
Lemma 6.1
(Power set properties) Let \(k,D \in {\mathbb {N}}\) with \(k<D\). Let \(A_1,\ldots A_{k+1}\) be pairwise distinct k-element subsets of \([D]=\{1,\ldots ,D\}\).
Then,
Moreover, equality implies \(\# \bigcup _{i=1}^{k+1} A_i = k+1\).
Proof
We first observe that \(\#A_i \cap A_j \le k-1\) and \(\#A_i\cup A_j \ge k+1\) for \(i\ne j\). We prove for all \(j=0,\ldots ,k\) that
To do so, we calculate
where the last inequality holds due to
which holds since \(B \in \mathcal P_{k-1}(A_i) \cap \mathcal P_{k-1}(A_j)\) implies \(B \subset A_i \cap A_j\) and implies \(\#B=k-1\ge \#A_i \cap A_j\) and hence, \(B = A_i \cap A_j\).
The last calculation implies
Applying (6.2) recursively yields
This proves (6.1) and that sharpness implies sharpness of (6.2) and (6.3) for all j. We now prove \(\# \bigcup _{i=1}^{k+1} A_i = k+1\) in case of sharpness of (6.1). The case \(k=1\) is trivially true and we assume \(k \ge 2\). Let \(A:= A_1 \cup A_2\). Due to sharpness of (6.2) for \(j=1\), we have \(\#\bigcup _{i=1}^2 \mathcal P_{k-1}(A_i) = 2k-1\) which implies \(\#A = k+1\) due to (6.4).
Due to sharpness of (6.2) and (6.3) for \(j=2\), we have
which due to (6.4) implies \(\# A_1 \cap A_3 = \#A_2 \cap A_3 = k-1\) and \(A_1 \cap A_3 \ne A_2 \cap A_3\). Thus,
which implies \(A_3 \subset A\). Reordering \(A_i\) yields \(A_i \subset A\) for all i. Hence, \(\#\bigcup _{i=1}^{k+1} A_i = \# A = k+1\) as desired. \(\square \)
6.2 A shell-wise construction of the hypercube
We recall the symmetric set difference \(A \ominus B = (A \cup B) {\setminus } (A \cap B) \).
Now, we have all ingredients to give a detailed proof of Theorem 2.11. To do so, we present an even stronger result.
Theorem 6.2
Let \(G=(V,E)\) be a D-regular bipartite graph and let \(k \in {\mathbb {N}}\). Suppose there is \(x_0 \in V\) s.t. \(d_-^{x_0}(y) = d(x_0,y)\) for all \(y \in B_k(x_0)\). Suppose the small sphere property (SSP) and the non-clustering property (NCP) (see Definition 2.9) are satisfied for all \(x \in B_{k-2}(x_0)\). Then, \(B_k(x_0)\) is isomorphic to the k-ball in the D-dimensional hypercube.
Proof
In the following arguments, we use Definition 1.8 of the hypercube. By assumption for \(x \in S_j(x_0)\), we have \(d_-^{x_0}(x) = j\) and due to bipartiteness and D-regularity, \(d_+^{x_0}(x)=D-j\) follows immediately. Hence with using the notation \(E(A,B):=\{\{x,y\}\in E: x\in A, y\in B\}\) for \(A,B \subseteq V\), we obtain
Applying inductively yields
for all \(j\le k\), assuming \(d_-^{x_0}(y) = d(x,y)\) for all \(y \in B_k(x_0)\).
Now we prove that we have an isomorphism \(\Phi _{\le k}: B_k(x_0) \cong {\mathcal {P}}_{\le k}([D])\) consistent with adjacency by induction over k, which then completes the proof of the theorem. Since G is a D-regular graph without triangles, we have an isomorphism \(\Phi _{\le 1}: B_1(x_0) \cong {\mathcal {P}}_{\le 1}([D])\), given by \(\Phi _{\le 1}(x_0) = \emptyset \) and \(\Phi _{\le 1}{(y_j)} = \{j\}\) for \(S_1(x) = \{y_1,\dots ,y_D\}\). This settles the case \(k=1\) of the induction.
By induction, we assume \(B_k(x_0) \cong \mathcal P_{\le k}([D])\) via an isomorphism \(\Phi _{\le k} : B_k(x_0) \rightarrow \mathcal P_{\le k}([D])\) for some \(k \ge 1\). We want to show \(B_{k+1}(x_0) \cong \mathcal P_{\le k+1}([D])\), assuming (SSP) and (NCP) for all \(x \in B_{k-1}(x_0)\) and \(d_-^{x_0}(y) = d(x_0,y)\) for all \(y \in B_{k+1}(x_0)\).
We recall \(f_0(x)=d(x,x_0)\) and we define a bipartite graph \((S_{k-1}(x_0) \cup S_{k+1}(x_0), R)\) via \((x,y) \in R\) if \(f_0(x) \ne f_0(y)\) and if \(d(x,y)=2\). We write \(\deg _R(x) := \#\{y:(x,y) \in R\}\). The disjoints parts are \(S_{k-1}(x_0)\) and \(S_{k+1}(x_0)\).
We now show that (SSP) and Lemma 6.1 give sharp bounds on \(\deg _R\).
For \(x \in S_{k-1}(x_0)\), we have by induction assumption, that is, existence of an isomorphism \(\Phi _{\le k}: B_k(x_0) \rightarrow {\mathcal {P}}_{\le k}([D])\), that
as in the hypercube. (This identity follows from the fact that, for a given subset \(A \subset [D]\) of cardinality \(k-1\), there are precisely \(D-k+1 \atopwithdelims ()2\) subsets \(A' \subset [D]\) of cardinality \(k+1\) containing A). By (SSP), we have for \(x \in S_{k-1}(x_0)\) that \(\# S_2(x) \le {D \atopwithdelims ()2}\) and thus,
On the other hand, for all \(z \in S_{k+1}(x_0)\), we have by assumption that \(d_-^{x_0}(z) = k+1\), say \(z \sim y_i\) for \(i = 1,\ldots ,k+1\) with \(y_i \in S_k(x_0)\) pairwise distinct. Due to induction assumption, \(y_i\) can be identified with pairwise distinct \(A_i := \Phi _{\le k}(y_i) \in \mathcal P_k([D])\). For \(x\in B_k(x_0)\), we have \(\Phi _{\le k}(x) \in \bigcup _{i=1}^{k+1}\mathcal P_{k-1}(A_i)\) if and only if \(x \in \#S_2(z) \cap S_{k-1}(x_0)\). Applying Lemma 6.1 yields
Due to (6.5), we have \(\#S_k(x_0)= {D \atopwithdelims ()k}\) and together with (6.6) and (6.7), we obtain
Thus, we have sharpness and this implies \(\deg _R(z) = {k+1 \atopwithdelims ()2}\) for all \(z \in S_{k+1}(x_0)\). By sharpness of (6.7) and Lemma 6.1, we have \(\# \bigcup _{i=1}^{k+1} A_i = k+1\). We define \(\Phi _{k+1}:S_{k+1}(x_0) \rightarrow \mathcal P_{k+1}([D])\),
Thus, the sets \(A_i\) are exactly the k-element subsets of \(\Phi _{k+1}(z)\). I.e., for \(z \in S_{k+1}(x_0)\) and \(y \in S_k{(x_0)}\), we have
We define \(\Phi _{\le k+1} : B_{k+1}(x_0) \rightarrow \mathcal P_{\le k+1}([D])\) via
By (6.9), we have \(x \sim y \Longleftrightarrow \Phi _{\le k+1}(x) \sim \Phi _{\le k+1}(y)\).
It remains to show that \(\Phi _{\le k+1}\) is bijective. To do so, it suffices to prove that \(\Phi _{k+1}\) is injective since \(\#S_{k+1} = \# \mathcal P_{k+1}([D])\) and since \(\Phi _{\le k}\) is bijective and since the domains and images of \(\Phi _{\le k}\) and \(\Phi _{k+1}\) are disjoint.
The idea to prove injectivity is to show that for every \(x \in S_{k-1}(x_0)\), we have that every \(z \in S_{2}(x)\) in the two-sphere of x has exactly two backwards-neighbors w.r.t. x. Then we apply the non-clustering property (NCP). From this, we will obtain injectivity of \(\Phi _{k+1}\). We now give the details.
Suppose \(x \in S_{k-1}(x_0)\) and \(z \in S_{k+1}(x_0)\) with \(d(x,z)=2\). Let \(X= \Phi _{\le k+1}(x)\) and \(Z= \Phi _{\le k+1}(z)\). Then, \(X\subset Z\) and \(\#X = k-1\) and \(\#Z=k+1\). Thus, \(\#\{Y:X\sim Y \sim Z\} = 2\), and since \(\Phi _{\le k}\) is an isomorphism, and since \(\Phi _{\le k}^{-1}(Y) \sim z\) if and only if \(Y \sim Z\), we infer \(\#\{y:x\sim y \sim z\} = 2\). I.e., for all \(x \in S_{k-1}(x_0)\) and for all \(z \in S_2(x) \cap S_{k+1}(x_0)\), we have \(d_-^{x}(z) = 2\). By bijectivity of \(\Phi _{\le k}\), we have for every \(z \in S_2(x) \cap B_{k}(x_0)\) that \(d_-^{x}(z) = 2\). Putting these together yields \(d_-^{x}(z) = 2\) for all \(z \in S_2(x)\). We now apply (NCP) and obtain that for all \(y_1,y_2 \in S_1(x)\) there is at most one \(z\in S_2(x)\) with \(y_1\sim z \sim y_2\).
Suppose \(\Phi _{k+1}(z_1) = \Phi _{k+1}(z_2) = Z\). Let \(X \subset Z\) with \(\#X = k-1\). Then, there exist \(Y_1, Y_2 \in S_1(X)\) s.t. \(Z \sim Y_i\), for \(i=1,2\). Let \(x = \Phi _{\le k}^{-1}(X)\) and \(y_i = \Phi _{\le k}^{-1}(Y_i)\) for \(i=1,2\). Thus, \(y_i \in S_1(x)\) and \(z_i \in S_2(x)\) and \(y_i \sim z_j\) for \(i,j=1,2\). By (NCP), we infer \(z_1 = z_2\). This proves injectivity of \(\Phi _{k+1}\) and hence, \(\Phi _{\le k+1}\) is an isomorphism, completing the induction step. This finishes the proof. \(\square \)
Taking \(k=D\) in the above theorem and employing the definition of the hypercube shell structure (see Definition 2.2) yields the following corollary which is the reappearance of Theorem 2.11.
Corollary 6.3
Let \(G=(V,E)\) be a graph with the hypercube shell structure HSS(D, 1). Suppose, G satisfies (SSP) and (NCP). Then, G is isomorphic to the D-dimensional hypercube.
References
Bakry, D., Émery, M.: Diffusions Hypercontractives. Séminaire de probabilités, XIX, 1983/84. Lecture Notes in Mathematics, vol. 1123, pp. 177–206. Springer, Berlin (1985)
Bakry, D.: Functional Inequalities for Markov Semigroups. Probability Measures on Groups: Recent Directions and Trends, pp. 91–147. Tata Inst. Fund. Res, Mumbai (2006)
Bauer, F., et al.: Curvature aspects of graphs. Proc. Am. Math. Soc. 145(5) (2017)
Cheng, S.Y.: Eigenvalue comparison theorems and its geometric applications. Math. Z. 143(3), 289–297 (1975)
Cushing, D., Liu, S., Peyerimhoff, N.: Bakry–Émery curvature functions on graphs. Can. J. Math. 72(1), 89–143 (2020)
Cushing, D., et al.: The graph curvature calculator and the curvatures of cubic graphs. Exp. Math. 31(2), 583–595 (2022)
Erbar, M., Maas, J.: Ricci curvature of finite Markov chains via convexity of the entropy. Arch. Ration. Mech. Anal. 206(3), 997–1038 (2012)
Fathi, M., Shu, Y.: Curvature and transport inequalities for Markov chains in discrete spaces. Bernoulli 24(1), 672–698 (2018)
Foldes, S.: A characterization of hypercubes. Discret. Math. 17(2), 155–159 (1977)
Gozlan, N., et al.: Displacement convexity of entropy and related inequalities on graphs. Probab. Theory Relat. Fields 160(1–2), 47–94 (2014)
Gromov, M.: Metric Structures for Riemannian and Non-Riemannian Spaces. English. Modern Birkhäuser Classics. Based on the 1981 French original, With Appendices by M. Katz, P. Pansu and S. Semmes, Translated from the French by Sean Michael Bates. Birkhäuser Boston Inc, Boston (2007)
Harary, F., Hayes, J.P., Wu, H.-J.: A survey of the theory of hypercube graphs. Comput. Math. Appl. 15(4), 277–289 (1988)
Horn, P., et al.: Volume doubling, Poincaré inequality and Gaussian heat kernel estimate for non-negatively curved graphs. J. Reine Angew. Math. (Crelles Journal) 2019(757), 89–130 (2019)
Keller, M., Lenz, D., Wojciechowski, R.K.: Volume growth, spectrum and stochastic completeness of infinite graphs. Math. Z. 274(3–4), 905–932 (2013)
Klartag, B., et al.: Discrete curvature and abelian groups. Can. J. Math. 68(3), 655–674 (2016)
Laborde, J.-M., Rao Hebbare, S.P.: Another characterization of hypercubes. Discret. Math. 39(2), 161–166 (1982)
Ledoux, M.: Spectral gap, logarithmic Sobolev constant, and geometric bounds. Surveys in Differential Geometry, vol. 9, pp. 219–240. Int. Press, Somerville (2004)
Lin, Y., Liu, S.: Equivalent properties of CD inequality on graph. Acta Mathematica Sinica, Chinese Series 61(3), 431–440 (2018) arXiv preprint arXiv:1512.02677 [math.CO]
Liu, S., Münch, F., Peyerimhoff, N.: Bakry–Émery curvature and diameter bounds on graphs. Calc. Var. Partial Differ. Equ. 57(2), 1–9 (2018)
Liu, S., Münch, F., Peyerimhoff, N.: Curvature and higher order Buser inequalities for the graph connection Laplacian. SIAM J. Discret. Math. 33(1), 257–305 (2019)
Liu, S., Peyerimhoff, N.: Eigenvalue ratios of non-negatively curved graphs. Comb. Probab. Comput. 27(5), 829–850 (2018)
Lott, J., Villani, C.: Ricci curvature for metric-measure spaces via optimal transport. Ann. Math. (2) 169(3), 903–991 (2009)
Myers, S.B.: Riemannian manifolds with positive mean curvature. Duke Math. J. 8, 401–404 (1941)
Obata, M.: Certain conditions for a Riemannian manifold to be isometric with a sphere. J. Math. Soc. Jpn. 14, 333–340 (1962)
Ollivier, Y., Villani, C.: A curved Brunn–Minkowski inequality on the discrete hypercube, or: what is the Ricci curvature of the discrete hypercube? SIAM J. Discret. Math. 26(3), 983–996 (2012)
Ollivier, Y.: A survey of Ricci curvature for metric spaces and Markov chains. Adv. Stud. Pure Math. 57, 343–381 (2010)
Ollivier, Y.: Ricci curvature of Markov chains on metric spaces. J. Funct. Anal. 256(3), 810–864 (2009)
Schmuckenschläger, M.: Curvature of Nonlocal Markov Generators Convex Geometric Analysis (Berkeley, CA, 1996). Mathematical Sciences Research Institute Publications, pp. 189–197. Cambridge University Press, Cambridge (1999)
Sturm, K.-T.: On the geometry of metric measure spaces. I. Acta Math. 196(1), 65–131 (2006)
Sturm, K.-T.: On the geometry of metric measure spaces. II. Acta Math. 196(1), 133–177 (2006)
Villani, C.: Synthetic theory of Ricci curvature bounds. Jpn. J. Math. 11(2), 219–263 (2016)
Wang, F.-Y.: Equivalent semigroup properties for the curvature-dimension condition. Bull. Sci. Math. 135(6–7), 803–815 (2011)
Acknowledgements
SL is supported by the National Key R and D Program of China 2020YFA0713100 and the National Natural Science Foundation of China (No. 12031017). FM wants to thank the German Research Foundation (DFG) and the German Academic Scholarship Foundation for financial support and the Harvard University Center of Mathematical Sciences and Applications for their hospitality. We gratefully acknowledge partial support by the EPSRC Grant EP/K016687/1. Finally, we like to thank the anonymous referee for many detailed comments and suggestions to improve the exposition of the paper.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Liu, S., Münch, F. & Peyerimhoff, N. Rigidity properties of the hypercube via Bakry–Émery curvature. Math. Ann. 388, 1225–1259 (2024). https://doi.org/10.1007/s00208-022-02537-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00208-022-02537-y