
Abstract
An automated vehicle storage and retrieval system (AVS/RS) is a widespread automated warehouse solution that hosts hundreds of stock-keeping units (SKU) and counts thousands of incoming and outgoing unit loads corresponding to a sequence of time-dependent storage and retrieval transactions. AVS/RS ensures high storage density, reduced cycle time, and high productivity. This study introduces and applies an original data-driven comparative and competitive multi-scenario methodology to measure and control the performance of a multi-deep tier-captive AVS/RS. This original methodology measures and controls the impact of lane depth (1), assignment strategy (2), opening strategy (3), and dispatching strategy (4) on the storage capacity, system throughput, and space efficiency in the design and configuration of an AVS/RS. The proposed methodology was applied to a real case study, demonstrating that the combination of the four leverages significantly affects system performance.
Similar content being viewed by others

1 Introduction
Production and distribution companies are currently moving toward innovative automated storage and material-handling solutions to overcome the weaknesses of traditional and manual systems. Automated storage and retrieval systems (AS/RS) are one of the most common solutions as they can guarantee high storage density. They consist of one or more aisles, each equipped with a stacker crane that stores or retrieves unit loads (UL AS/RS) or totes/plastic containers (mini-load AS/RS) simultaneously moving vertically and horizontally. Parallel operation on different tiers is not possible. In addition, this solution usually serves racks with a maximum depth of three storage locations, limiting storage capacity.
More recently, a further widespread automated storage solution is the automated vehicle storage and retrieval system (AVS/RS), which can overcome the weaknesses of the AS/RS. This solution ensures a high storage density and improves system performance in terms of productivity (reducing the transaction cycle time and increasing system throughput). In AVS/RS, the storage density is related with:
-
Storage capacity (SC), which is the sum of the storage locations in the system.
-
Space efficiency (SE), which is the ability to exploit available space.
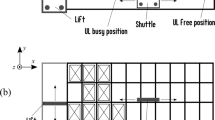
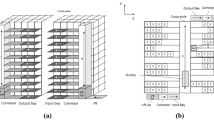
Figure 1 shows the configuration of a deep-lane (i.e. multi-deep) tier-captive AVS/RS for the storage and retrieval (S/R) of palletised ULs. This system consists of independent tiers (y-direction in Fig. 1a) connected by a set of lifts at different locations and functions. Each tier has a main cross-aisle (x-direction in Fig. 1a) and multiple deep lanes (z-direction in Fig. 1a). A generic k-depth lane can host 0 to k ULs of the same stock-keeping unit (SKU, represented by different colours in Fig. 1b) according to last-in-first-out (LIFO) storage/retrieval handling. A lane is empty when all storage locations are empty. Otherwise, it is busy when it hosts only one UL or multiple homogeneous ULs.

a AVS/RS front view. b AVS/RS plant view
The tier-captive configuration uses two automated vehicles in the generic tier: a shuttle and a satellite. The former travels back and forth along the main cross-aisle (x-direction in Fig. 1b), transporting the UL and satellite. The latter enters the lane (z-direction in Fig. 1b) to load or unload the selected ULs.
Given the coordinates (x, y, z) of the storage locations in which the UL is stored, the storage activity involves the following elementary tasks:
-
The UL is loaded into an inbound lift and transported to the selected tier (y-direction, Fig. 1a).
-
The UL enters an input conveyor that transports the load to an input bay, which is the buffer area where the UL waits to be loaded by the shuttle.
-
The shuttle moves along the main cross-aisle (x-direction in Fig. 1b), transporting the UL and satellite to the selected lane.
-
The satellite enters the lane (z-direction in Fig. 1b) and transports the UL to the selected storage location.
Similarly, retrieval activity involves the following tasks:
-
The shuttle moves the satellite to reach the selected lane hosting the outgoing UL (x-direction in Fig. 1b).
-
The satellite enters the lane to retrieve the UL from the selected storage location (z-direction in Fig. 1b).
-
The shuttle transports the satellite and UL to a buffer area, the output bay in Fig. 1b (x-direction in Fig. 1b).
-
An output conveyor moves the outgoing UL from the output bay to the outbound lift (Fig. 1b);
-
The UL reaches the ground tier (y-direction in Fig. 1b) and exits the system.
The system throughput (ST) and SE of deep-lane storage systems depend significantly on the criteria used for storing ULs inside a generic lane, named assignment strategy (AS) by the authors of this paper.
The most common real-world AS requires a generic lane containing only ULs of the same SKU. This is a mono SKU storage AS. Other criteria may be used to aggregate incoming ULs, such as grouping ULs of the same SKU and production batch (mono SKU-BATCH AS) or with the same expiration date, mono SKU-FEFO (First Expired First Out) AS.
One of the most critical and challenging issues in industrial applications is choosing the best compromise solution while controlling the nominal SC (1), SE (2), and ST (3). Most of the literature provides analytical and simulative models and tools to measure and optimise AVS/RS performance productivity, for example, ST, neglecting the implications of the other two performance and critical dimensions. Battarra et al. [1] showed that SE implications are rarely discussed. This involves managing storage locations and assignments in agreement with S/R transactions according to different SKUs and production batches. A standard indicator of this SE is the ratio between the busy and total storage locations.
The sum of the total storage locations in all lanes is the nominal SC of the system. This capacity is built considering transaction management strategies (TMS), such as assignment, opening, and dispatching strategies (introduced and discussed in Section 3). The cost of a warehouse depends on the nominal SC because it varies according to the amount of used materials, e.g. shelves and electric and electronic equipment. Therefore, companies prefer warehouses with minimum storage locations to accommodate all incoming and outgoing ULs. The nominal SC differs from the real storage capacity (RSC), which measures the number of storage locations available to host an incoming UL. The RSC depends significantly on the lane depth and the combination of critical operational strategies.
This study demonstrates that lane-depth determination is a critical issue in designing, managing, and controlling an AVS/RS, as it strongly affects system performance regarding nominal SC, SE, and ST. Additionally, S/R transaction management strategies are important for supporting the best system configuration.
The original proposed methodology for measuring and controlling this set of performances consists of a data-driven, what-if, comparative, and competitive multi-scenario analysis based on the hybrid analytical-simulative modelling approach introduced for the first time by Battarra et al. [2].
The proposed analyses were based on realistic assumptions, filling the gap between the literature and real-world industrial applications. The hybrid analytical-simulative model is time-driven according to a data entry made of historical S/R transactions. These transactions are frequently available in real applications passing from an existing storage system to an AVS/RS. In case of design of an AVS/RS without the availability of historical data, it is possible to define the expected S/R transactions and configure the system accordingly.
The remainder of this paper is organised as follows. Section 2 presents a literature review of AVS/RSs and lane-depth determination problem. Section 3 describes the proposed methodology for measuring and controlling the performance of a deep-lane AVS/RS. Section 4 presents the application of the methodology to a case study consisting of a real AVS/RS operating in the beverage industry and presents the results of a multi-scenario analysis. Section 5 presents conclusions and directions for further research.
2 Literature review
The recent growth of automated warehouses in modern companies has increased with growing interest in academic research on the design, management, and control of these systems. The most widely used traditional automated solution is the AS/RS. More recent systems include the AVS/RS and shuttle-based storage and retrieval systems (SBS/RS). They differ in the type of loads handled and S/R machine. The AS/RS manages palletised ULs using a stacker crane. AVS/RS and SBS/RS require two independent vehicles: a shuttle and a lift. In deep-lane storage systems, the shuttle works jointly with another vehicle, the satellite, which completes S/R transactions within the lane. The AVS/RS commonly manages palletised ULs, whereas totes and plastic containers for small parts or components represent the typology of loads favoured by the SBS/RS. This literature review presents a comprehensive overview of the modelling approaches, system leverage, and performance investigated in recent studies on different automated warehouses.
Most of the existing literature proposed analytical models that were validated through simulations. The aim was to identify the relationship between the selected system leverage and performance in terms of cycle time and ST.
Azadeh et al. [3] proposed three categories for classifying and reviewing the literature on automated storage systems: system analysis (1), design optimisation (2), and operations planning and control (3).
In the system analysis category, the literature investigates the relationship between system performance and system configuration by varying the modelling approach. Lerher et al. [4] developed an analytical travel-time model to compute the cycle time for SBS/RS for both single and dual commands. Lerher et al. [5] expanded this study to AVS/RSs by considering multi-tier shuttle vehicles. Roy [6] proposed a stochastic model for a multitier conveyor AVS/RS based on a semi-open queuing network monitoring transaction service and waiting times to evaluate the congestion effects in processing S/R transactions. Khojasteh and Son [7] developed a nonlinear programming model to minimise the total time spent by an S/R machine to complete the retrieval of customer orders in an AS/RS. This study proposed a heuristic procedure known as the shortest travel distance. Ghomri and Sari [8] studied an analytical model to evaluate the average retrieval time and design of a flow rack AS/RS. They considered the machines involved in retrieval transactions to operate in random conditions. Roy et al. [9] studied a multitier queuing modelling framework for performance analysis (cycle time) of AVS/RS using Markov chains. Eder [10] developed a time continuous queueing model for performance calculation (in terms of cycle time) of SBS/RS equipped with tier captive shuttles. A comparison between the proposed analytical approach and a discrete events simulation is illustrated.
Concerning design optimisation, Fukunari and Malmborg [11] introduced a network-queuing approach to estimate and compare the cycle time and vehicle utilisation in an AVS/RS with different rack configurations. Ekren et al. [12] proposed a simulation-based experimental design to identify the factors affecting AV/RS performance. The study applied an experimental technique that combined different lifts and vehicles with various S/R arrival rates. Three different responses were considered: average cycle time for S/R transactions, average vehicle utilisation, and average lift utilisation. Ekren and Banu [13] presented a simulation model to assess the performance, cycle time, and waiting time of an AVS/RS in predefined scenarios. These scenarios were based on alternative warehouse rack configurations including the number of aisles, lifts, bays, tiers, and different automated vehicles. Marchet et al. [14] developed a framework for designing an AVS/RS that enhanced the main design tradeoffs (e.g. tier-to-tier vs. tier-captive configuration) to compare the cycle time, vehicle utilisation, and costs in different scenarios. Eder [15] presented a model for determining the performance (in terms of cycle time) of SBS/RS with tier-captive, single-aisle shuttles serving tiers of multiple-deep storage, and using a class-based storage policy.
These studies, and most previous ones on automated warehousing systems, aim to measure, monitor, and optimise system performance regarding cycle time and productivity (ST). Modern industries face multi-objective decision-making problems; system productivity is only one of the performances affecting the ability of an industry to maintain a competitive advantage in the long term. The cycle time increases the ST, which concerns the number of ULs handled in an hour and the daily operational cost of handling system productivity. The other critical dimensions were the following:
-
1.
The storage capacity influences the investment costs of an AVS/RS as well as the working costs of moving storage and handling vehicles in expensive storage systems due to the wide storage areas.
-
2.
The space efficiency measures the ability to store and retrieve ULs according to the mono SKU (mono SKU-BATCH or mono SKU-FEFO) constraints within a single lane of a storage system.
These two critical dimensions have rarely been discussed in the literature. The lane-depth determination problem severely affects the SC and SE of multi-deep storage systems. Single-deep racks are also easy to manage. Each storage location can be free or busy. Occupying a specific location instead of another impacts only the S/R cycle time and not the SE performance.
Deep-lane systems are highly complex. Lane depth determination defines the best lane depth, which allows storage of ULs according to the assignment strategy, and ensures a good filling degree and S/R cycle time. This study simultaneously models the following critical leverages that impact the system performance dimensions (SC, SE, ST): lane depth determination, assignment strategy (AS), opening strategy (OS), and dispatching strategy (DS).
Table 1 summarises the most significant contributions from the literature, according to the critical features: the four leverages and three dimensions of system performance. The fields in the table are the following:
-
Name of the corresponding authors.
-
System type, i.e. the type of automated warehouse.
-
Lane depth determination indicates if the study faces the problem of lane depth determination.
-
AS, OS, and DS adopted to determine the nominal SC of the system and to elect coordinates of S/R transactions.
-
Modelling approach refers to the following options: analytical, simulative, analytical-simulative, or hybrid. The analytical-simulative option involves the development of an analytical model validated by a simulative model. The hybrid option involves the development of a hybrid analytical-simulative model.
-
Tool refers to the adoption of commercial or non-commercial supporting decision platforms and software.
-
Specific performance dimensions (SC, SE, and ST) object of the study.
-
Application (or not application) of a case study.
This literature review highlights two main gaps: the first is related to leverage and the second to system performance.
Concerning the leverage gap, little attention has been paid to analysing the impact of lane depth, AS, OS, and DS on system performance; few studies have explored these relationships. Moreover, the combination of two or more leverages has rarely been investigated.
Lane-depth determination concerns multi-deep automated warehouses. However, few studies have evaluated the impact of this fundamental leverage. Given alternative layout configurations, Manzini et al. [16] developed a set of original analytical models to determine the travel distance and time in an AVS/RS. The goal of this study was to determine the number and depth of lanes to aid in the design and control of such storage systems.
Other studies faced the lane-depth determination problem but considered different automated warehouse solutions. Wang et al. [17] investigated the operation cycle of a rack-moving mobile robot (RMMR) for handling S/R transactions from the perspective of lane depth. This parts-to-picker automated warehousing system uses hundreds of moving racks to accomplish the repetitive tasks of autonomously storing and retrieving parts by lifting and transporting unit racks. The study focused on expected travel time models for single and multi-deep layouts, and an experimental simulation was conducted by varying the lane depth from one to four storage locations. Yang et al. [18] presented a model for the design and control of multi-deep compact robotic mobile fulfilment systems (RMFS). The RMFS is a parts-to-picker system designed for warehouses; robots retrieve items from the storage area and transport them to the appropriate picking station. They developed a semi-open queuing network model to assess the impact of certain parameters on ST, including the effects of different lane-depth configurations. Clements et al. [19] developed an approach for modelling bulk lane storage in a high-volume warehouse environment. Bulk storage lanes are widely used for storing SKUs with large production batch sizes and high picking frequencies. This study presented a methodology to evaluate alternative bulk storage warehouse configurations, considering different depths of bulk lane rows and attempting to reduce service time. Recently, Dong and Jin [20] modelled the warehouse design problem for a traditional AS/RS and a 3D AS/RS whose cranes work with shuttles moving throughout multi-deep lanes. The proposed models aim to minimise the investment costs and maximise system throughput under various business needs, such as cost structure, responsiveness requirement, demand rates, and inventory levels. This study showed that high throughput expectation leads to a design with shallow storage racks, while high land/equipment costs have opposite impacts. Accorsi et al. [21] illustrated an original decision-support model for managing the design of block storage warehouses. This study demonstrated that setting the optimal lane depths for incoming SKUs influences the overall space and time efficiency performance, as well as the selection of proper storage modes.
Regarding the AS, Battarra et al. [2] first presented the assignment problem by introducing single SKU channel LIFO unit load handling; each lane contained one or more ULs of the same item. The assignment deals with the criterion for storing ULs in the same lane, in agreement with the previously defined mono SKU, mono SKU-BATCH, and mono SKU-FEFO policies.
Concerning the DS, D’Antonio and Chiabert [22] proposed an analytical model to evaluate the cycle time of an AVS/RS by comparing different DS: random, closest floor, and closest channel. Marolt et al. [23] indicated the impact of relocation cycles on system performance. These cycles are necessary to face blocks within a single lane hosting multiple SKUs and can significantly reduce the ST. They developed a discrete event simulation to study multiple-deep AVS/RSs with three DS applied to storage and relocation transactions (random, depth-first, and nearest neighbours).
Regarding the performance gap, most studies have examined the implications of system productivity. Many studies on system configurations consider the SC as an input and do not measure the impact of strategic decisions on performance. SE is another important performance dimension of multi-deep storage systems. Battarra et al. [1] presented and applied an original set of indicators to measure the impact of storage policies and DSs on SE, supporting the decision-making process for designing, managing, and controlling AVSs/RSs. For the first time, this study discussed the importance of controlling storage space and filling degree, which are measures of SE. A critical issue related to SE that has not yet been discussed in the literature is the gap between nominal and real SC. The nominal SC can be defined as the number of storage locations in the system. The RSC is the number of storage locations in the lanes that can host a generic UL according to the AS and other physical and logical constraints. This critical gap increases the SE and system filling degree of AVS/RS.
This literature review demonstrates that most of the contributions to automated warehouse solutions focus on determining the cycle time and ST. The control of SC and SE in accordance with lane-depth determination and the S/R transaction management strategies still must be discussed. The importance of these leverages is crucial as they directly affect the layout of the system (SC), impact the filling degree of the nominal/real SC (SE), and the service and waiting times (ST). This study proposes a novel methodology to control SC, SE, and ST simultaneously, monitoring the influence of lane depth and transaction management strategies. These strategies are based on real-world assumptions, not random criteria as frequently assumed in the literature. This methodology is illustrated in the following section and applied in a real case study.
3 Methodology
This section illustrates the proposed data-driven decision-support methodology for the best configuration of a deep-lane tier-captive AVS/RS. Figure 2 illustrates the methodological framework used in this study. The methodology consists of three main steps. Data entry (STEP 1 in Fig. 2) contains a list of storage and retrieval transactions to be performed.

Main section of the methodology framework
This study considers lane depth and three transaction management strategies as the four main decisions (leverages, STEP 2 in Fig. 2) of the methodology affecting system performance. The three strategies are the AS, OS, and DS.
-
The AS, STEP 2.1 in Fig. 2, establishes the criteria for storing ULs inside a generic lane.
-
The OS, STEP 2.2 in Fig. 2, establishes the criterion for assigning an incoming UL to a busy or empty lane.
-
The S/R DS, STEP 2.3 in Fig. 2, establishes a criterion for selecting a specific lane for the incoming and outgoing UL.
Determining the lane depth and applying the TMS leads to defining the first of the three performance indicators selected by this methodology: the nominal SC. SC is the necessary number of storage locations to host the ULs for data entry. This is the first output of the proposed methodology and depends on the lane depth, number of lanes per tier, and number of tiers (k, L, and T in Fig. 1a).
The performance assessment (STEP 3 in Fig. 2) established two other outputs of the process: SE and ST. More precisely, the hybrid model developed by Battarra et al. (2022a) processes S/R transactions (data entry) considering the previously defined system layout and TMS to evaluate system performance.
This multi-scenario (closed loop new scenario in Fig. 2) methodology aims to monitor, evaluate, and control the nominal SC, SE, and ST of a deep-lane tier-captive AVS/RS by varying the lane depth and S/R transaction management strategies.
3.1 Data entry—STEP 1
The proposed methodological approach is data-driven. It works with historical real-world data. This is the best solution to realistically represent a list of S/R transactions, instead of generating data according to exponential and Poisson distributions.
The data entry containing the list of S/R transactions has a predefined structure. Table 2 presents the data entry records corresponding to the three transactions (T1, T2, and T3).
There are two types (type in Table 2) of transactions: storage (S) and retrieval (R). The time scheduling of the list of transactions is managed by the arrival time (time in Table 2). The generic transaction handles a specific SKU (ID_SKU in Table 2), which belongs to a production batch (ID_batch in Table 2) and has an expiration date (Exp_date in Table 2) typical of perishable products. This information is necessary to apply the previously defined AS: the location to store or retrieve a generic UL is uniquely defined by the (x, y, z) coordinates, representing the tier, lane, and location within the lane (tier, lane, and location in Table 2). Assigning the coordinates to a storage transaction is necessary to apply the three transaction management strategies of STEP 2, in the order AS, OS, and DS. To assign coordinates to a retrieval transaction, it is necessary to apply the DS directly.
3.2 Leverages—STEP 2
This section describes the objectives of the proposed methodology. The four leverages that contribute to the performance assessment of the system are the lane depth, AS, OS, and DS.
The lane-depth determination (STEP 2.0, shown in Fig. 2) was the starting point for defining the system configuration. Given a generic tier, the system consists of two blocks on the sides of the cross-aisle (Fig. 1), each with a specific lane depth (number of storage locations). Each UL has a preferred lane depth according to its AS. For example, for a large production batch of a specific SKU, the incoming ULs can be hosted by long, homogeneous lanes, which are single SKU and batches.
The two selected depths, one for each side, should be the best compromise among all ULs to improve system performance.
The AS (STEP 2.1 in Fig. 2) establishes a criterion for storing ULs in a generic lane. According to this strategy, the ULs should be clustered according to a specific criterion. A lane can host only the ULs of the same homogeneous cluster. This study proposes four alternative rules for AS:
-
Mono SKU: a generic lane containing only ULs of the same SKU.
-
Mono SKU-BATCH: a generic lane containing only ULs of the same SKU and production batch.
-
Mono SKU-FEFO 1: a generic lane containing only ULs of the same SKU with the same expiration month. This rule complies with the FEFO policy, which frequently drives retrieval transactions in real-world applications, particularly for perishable products.
-
Mono SKU-FEFO 2: this rule is similar to the mono SKU-FEFO1 rule; however, it groups the ULs that expire in a time horizon of 15 days instead of considering the entire month.
The difference between these rules lies in the time horizon that creates the different clusters. The mono-SKU rule considers the entire time horizon corresponding to the data set selected in the data entry (STEP 1). The mono SKU-FEFO 1 rule considers 30 days, the mono SKU-FEFO 2 rule considers 15 days, and the mono SKU-BATCH rule considers the number of days corresponding to a single production batch. Typically, a batch corresponds to one day in a real application.
Every time a generic lane becomes empty, it can host a new SKU, SKU-BATCH, or SKU-FEFO, according to the assignment rule. When a storage transaction occurs, this strategy provides a subset of lanes where the UL can be stored according to the available locations. Availability is defined in terms of the lanes that host homogeneous ULs. This subset of lanes corresponds to the predefined RSC of the system.
The OS (STEP 2.2; Fig. 2) establishes the criterion for assigning an incoming UL to a busy or empty lane. After the AS provides a subset of lanes where the UL can be stored, the OS establishes whether the UL must be stored in a busy lane of the subset or in a new empty lane. Before this decision-making step, the system layout contained information only about the lane depth (STEO 2.0, Fig. 2).
This strategy uses a constructive heuristic approach that processes a list of incoming transactions by adding new empty lanes when necessary. This study proposes three different opening rules corresponding to the following three heuristic procedures:
-
Minimum number (MN): According to the AS, this rule assigns the incoming UL to lanes with at least one empty storage location. If more than one lane has empty storage locations, the selection follows a DS (STEP 2.3). A new lane is opened when there are no empty storage locations in the subset of lanes provided by the AS. This rule improves the SE by minimising the warehouse size (nominal SC) and maximising the filling degree of busy lanes.
-
Dedicated number (DN): According to the AS, this rule assigns an incoming UL to one of the dedicated lanes with at least one empty storage location. The dedicated number of lanes is the ratio between the average batch quantity and lane depth defined in STEP 2.0. Every time an incoming UL occurs, a new empty lane is opened, until the number of lanes containing the SKU (SKU-BATCH or SKU-FEFO) reaches the DN. When the number of opened lanes is the DN, lane selection for an incoming UL follows a DS (STEP 2.3). Otherwise, an additional empty lane can be opened if all dedicated lanes are full. This rule was inspired by real applications interested in guaranteeing a high ST. The DN rule favours an increase in the ST rather than SE because it attempts to spread the ULs on different tiers and lanes, reducing the waiting times instead of having a high filling degree.
-
Dedicated number with a filling degree criterion (DN-FD): This hybrid rule assigns an incoming UL to one of the dedicated lanes with at least one empty storage location, introducing another criterion. Before opening a new lane to reach the previously defined number of dedicated lanes (DN), this rule measures the average filling degree (AFD) of the lanes that already host the ULs of the same SKU (SKU-BATCH or SKU-FEFO). If the AFD exceeds a predefined threshold, a parameter in this heuristic procedure, a new empty lane is opened. Otherwise, based on the DS, the UL is assigned to one of the existing lanes. A new empty lane is opened when the number of lanes with at least one UL of that SKU (SKU-BATCH or SKU-FEFO) reaches this number of dedicated lanes. This rule favours the spreading of ULs in the opened lanes, in line with the DN rule, without adding new empty lanes if the filling degree of the existing lanes assigned to the same SKU is lower than a specific threshold. The DN-FD rule ensures that the degree of lane filling is controlled. If the threshold is 0%, the DN-FD rule equals the DN rule. Otherwise, if the threshold is 100%, the DN-FD rule is equivalent to the MN rule by opening new empty lanes only when the existing lanes are full.
The S/R DS (STEP 2.3 in Fig. 2) establishes the criteria for assigning incoming and outgoing ULs to a specific lane. This involves the selection of coordinates to store or retrieve the UL, that is the tier, lane, and storage location (y, x, and z in Fig. 1). For a storage transaction, if the OS assigns the UL to a subset of lanes provided by the AS, the DS selects the lane to store the UL. For a retrieval transaction, the DS selects a storage location from among all containing the SKU (SKU-BATCH or SKU-FEFO) from which to retrieve the UL. This study proposes three alternative dispatching rules:
-
Random (RND): According to the AS, the election of coordinates for an S/R transaction is random among all lanes that contain at least one UL without any preferences on the tier. If a storage transaction occurs and no lanes are assigned to that UL, or all lanes are full, the lane is randomly selected from the empty lanes with no tier preferences.
-
Maximum filling degree (MFD): Selection of the storage (retrieval) transaction coordinates involves the random selection of a lane from those with a fill-grade factor larger (smaller) than the average fill grade among all lanes that already contain the SKU (or SKU-BATCH, SKU-FEFO). If a storage transaction occurs and all lanes containing the SKU are full, the lane is selected from the empty lanes located in the tiers with no lanes assigned to that SKU. This facilitates the allocation of the same SKU (SKU-BATCH or SKU-FEFO) in all tiers. This rule attempts to improve SE by increasing the filling degree of previously defined busy lanes.
-
Maximum throughput (MT): According to the AS, the selection of storage (retrieval) transaction coordinates involves the random selection of a lane with a fill-grade factor smaller (larger) than the average fill grade from all lanes that already contain the SKU. Similar to the MFD rule, if all lanes assigned to the SKU are full and a storage transaction occurs, the lane is selected from the empty lanes located in tiers with no lanes assigned to that SKU. This facilitates the allocation of the same SKU to all tiers. Thus, the ST increases as transactions are processed simultaneously in different lanes and tiers, reducing waiting times.
Classification of lanes according to the fill-grade factor allows the lane to be selected from a subset of the total number of lanes instead of having a single option, such as the fullest (emptiest) lane.
3.3 Transaction management strategies application
This subsection presents three examples of applications of the TMS. Figure 3 shows a generic tier for a specific scenario with lane depth k = 12 storage locations and a cross-aisle length = 62 lanes. The two transaction objects of this application were the storage and retrieval of a UL with ID=T19 and ID_SKU=007. The AS was mono-SKU. This means that the UL with ID_SKU 007 can be stored (or retrieved) on lanes L58 left side (LS), L61 left side (LS), or L4 right side (RS) of the cross-aisle. Otherwise, the UL is stored in an empty lane (L4 LS).

Transaction management strategies application
3.3.1 Example 1: minimum number and max throughput rules
This example shows the application of the OS and DS, in particular, the MN rule (OS) and MT rule (DS). According to MN, a new empty lane must not be opened because storage locations are available in those already open. The choice of lane among those available depends on the DS adopted. The fill-grade factors of each available lane are the following:
-
L4 RS = 41.66% (5 busy storage locations out of 12).
-
L58 LS = 41.66% (5 busy storage locations out of 12).
-
L61 LS = 16.66% (2 busy storage locations out of 12).
The resulting average fill-grade factor of the three lanes is 33.33%. According to MT, the selected lane to host the UL is L61 LS because it has a fill-grade factor (16.66%) smaller than the average fill-grade factor (33.33%).
For an outgoing UL with ID_SKU = 007, the MT rule selects a lane randomly between L58 LS and L4 RS because they have a fill-grade factor (41.66%) larger than the average fill-grade factor (33.33%).
3.3.2 Example 2: dedicated number and max filling degree rules
This example shows the application of the DN rule (OS) and MFD rule (DS). Assuming an average production batch for SKU 007 equal to 36 and given a lane depth equal to 12, the resulting dedicated number of lanes for that SKU is three lanes. According to the DN rule, opening a new empty lane is unnecessary. The MFD rule randomly selects the hosting lane between L58 LS and L4 RS because the fill-grade factor is larger than the average fill-grade factor previously calculated. If the dedicated number of lanes for SKU 007 would have been 4, the UL must be stored in a new empty lane, such as L4 LS.
Now considering an outgoing UL with ID_SKU = 007, the MFD Dispatching rule selects lane L61 LS because it has a fill-grade factor (16.66%) smaller than the average fill-grade factor (33.33%).
3.3.3 Example 3: minimum number with filling degree and random rules
This example shows the application of the MN-FD rule (OS) and RND rule (DS). Assuming a filling degree threshold of 50% and a dedicated number of lanes for the SKU equal to 5, it is not necessary to open a new empty lane because the average filling degree of the lanes that already host ULs (33.33%) is smaller than the threshold (50%). The RND rule selects a random lane between L58 LS, L61 LS, or L4 RS.
Assuming a filling degree threshold of 25% and a dedicated number of lanes for the SKU equal to 5, it is necessary to open a new empty lane because the average filling degree of the lanes that already host ULs (33.33%) is greater than the threshold (25%).
For the outgoing UL with ID_SKU = 007, the RND dispatching rule selects a random lane between L58 LS, L61 LS, or L4 RS.
The definition of lane depth and the three transaction management strategies lead to the system configuration (output section in Fig. 2) by nominal SC determination. The layout definition allows STEP 3 of the methodology to evaluate SE and ST.
3.4 Performance assessment—STEP 3 and expected results
The hybrid analytical–simulative evaluation model proposed and validated by Battarra et al. (2022a) drives STEP 3 of the proposed methodology. This model overcomes the limitations of both analytical and simulation methods. The analytical model allows for the evaluation of the service time required to perform a generic transaction. The simulation model manages waiting times in agreement with the real sequence and timing of the incoming and outcoming ULs. The simulation model is based on MATLAB. The S/R data entry transactions were ordered chronologically and dispatched among the tiers following the AS, OS, and DS. Transactions arrive at the system according to the arrival time in the data entry; the ST is measured by calculating the average service and waiting times for each S/R transaction. In addition, SE is measured by calculating the average filling degree of the previously defined busy lanes.
After evaluating the performance outputs presented in Fig. 2, the cycle can start again with a new scenario by setting a new lane depth or modifying the AS, OS, or DS. The results obtained from all simulated scenarios can be compared by managing these leverages.
The expected results (ER) must be verified using the case study illustrated in the next section:
-
1.
ER1: The greater the SC, the lower is the filling degree of the lanes.
-
2.
ER2: Regarding the OS, the MN rule improves SE, and the DN rule improves ST.
-
3.
ER3: For the DS, the MFD rule improves SE, and the MT rule improves ST.
-
4.
ER4: Combination of the MN rule and MFD rule should generate the best value for SE.
-
5.
ER5: Combination of the DN rule and MT rule should generate the best ST value.
-
6.
ER6: If the goal is to maximise SE, the performance in terms of ST will be poorer, and vice versa.
-
7.
ER7: The AS enables the collection of one or more ULs in the same lane according to their SKU (mono SKU rule), production batch (mono SKU-BATCH rule), or expiration date (mono SKU-FEFO rule). The AS directly affects SC by increasing (decreasing) the complexity of managing a greater (smaller) number of different items (SKUs). The lower the time horizon of the aggregation criterion of the ULs, the greater is the number of different SKUs to manage, and a higher SC is necessary. Thus, the mono SKU rule generates a lower SC and the mono SKU-BATCH rule generates a higher SC.
The following section presents the application of the proposed methodology to a real case study.
4 Case study and what-if multi-scenario analysis
This section presents the results of applying the proposed methodology to assess the configuration of a deep-lane, tier-captive AVS/RS. This case study is inspired by real applications in the beverage industry. System performance was measured in terms of SC, SE, calculated as the AFD of busy lanes, and ST, calculated as average service and waiting times.
This system consists of the following main equipment:
-
Nine tiers
-
Three lifts, one for storage transactions and two for retrieval transactions. The two lift typologies were located on opposite sides of the cross-aisle. Each lift could host one or two ULs
-
Nine shuttles (1 per tier), each hosting one satellite
-
Nine satellites (1 per tier), each hosting one UL
Real features were considered to best simulate vehicle movements. Table 3 presents the parameters used to represent the kinematics and the fixed times for handling the ULs considered in the case study. Each vehicle had a specific velocity and acceleration/deceleration when handling a UL (empty term in Table 3). Each time a UL changes a vehicle, there are fixed times to load/unload the UL depending on the vehicles involved. The conveyor operates according to a constant transit time (lead time in Table 3).
The data entry selected for this analysis is a list of historical chronologically ordered S/R transactions containing 52,018 storage and 61,132 retrieval transactions for 212 different SKUs. This data entry corresponds to 74 working days.
The goal of applying the proposed methodology to this case study is to evaluate the impact of the four leverages on system performance. Combining the four assignment rules, three opening rules and three dispatching rules generated 36 scenarios. Each scenario was tested by varying the lane depth from 8 to 32 (even values) storage locations, generating 468 scenarios. To evaluate the impact of the four leverages on performance, the following three analyses were conducted:
-
1.
Analysis 1: SE oriented. This analysis assumes a set of rules oriented toward improving SE by varying lane depth.
-
2.
Analysis 2: ST oriented. This analysis assumes a set of rules oriented toward improving the ST by varying the lane depth.
-
3.
Analysis 3: AS oriented. This analysis evaluates and compares the impact of the four assignment rules on system performance.
4.1 Analysis 1: SE-oriented
The three rules selected for the application of transaction management strategies are the following:
-
Mono SKU-FEFO 1 assignment rule (AS), a lane can host only ULs of the same SKU with the same expiration month. The number of processed items, defined by the key SKU-expiration month (SKU_EXP_MONTH), was 340.
-
MN opening rule (OS): Opening of a new lane occurs only if there are no empty storage locations in the lanes that have already opened that host ULs of the same SKU_EXP_MONTH.
-
MFD dispatching rule (DS): It attempts to fill fuller lanes and empty emptier ones.
With this combination of rules, the system should improve SE.
Table 4 shows the results of the multi-scenario analysis of varying lane depths. Given the value of k, the generic row of the table contains the length of the main aisle (aisle length), SC, the AFD of previously defined busy lanes, average service time, average waiting time, and average total time (sum of the two previous times) required to perform a generic S/R transaction.
Some considerations regarding the results presented in Table 4:
-
If k increases, the length of the main aisle decreases.
-
If k increases, the total SC increases.
-
If k increases, the AFD of busy lanes decreases. If the SC increases and the number of S/R transactions processed is the same between different scenarios, then the SE decreases. This consideration validates the previously introduced expected result 1 (ER1).
-
This combination of rules generates high AFD values, validating the expected result 4 (ER4); k = 8 yielded the highest value of the simulated scenarios.
-
The average total time required to perform a S/R transaction had the best value at k = 14, with 873.55 s per transaction.
-
To optimise SE, the average waiting times and average total time are high, reducing performance in terms of ST. This consideration validates expected result 6 (ER6).
4.2 Analysis 2: ST-oriented
This analysis is divided into Analysis 2.1 and Analysis 2.2, which are similar to Analysis 1, but use different rules.
4.2.1 Analysis 2.1
The three rules selected for the transaction management strategies in Analysis 2.1 are the following:
-
Mono SKU-FEFO 1 assignment rule (AS), a lane can host only ULs of the same SKU with the same expiration month.
-
DN opening rules (OS): Opening of a new lane is predicted until the number of dedicated lanes for SKU_EXP_MONTH is reached.
-
MT dispatching rule (DS): The empty lanes are filled and the fuller lanes are emptied.
With this combination of rules, the ST should be improved. Table 5 shows the results of Analysis 2.1.
Some considerations regarding the results presented in Table 5:
-
The average service times are similar to those generated in Analysis 1. The four leverages do not significantly affect these times, depending on the vehicle performance and system layout. The component of time that varies and has a greater impact on the total average time is the average waiting time.
-
The average total times significantly decreased compared to those in Analysis 1. The best total average time was 271.67 seconds, 69% less than in Analysis 1, with k = 24 storage locations instead of k = 14 as in Analysis 1.
-
Improving the performance in terms of ST decreases the SE. This consideration validated expected result 6 (ER6).
-
Although the average total times were smaller, the DN rule (OS) and MT rule (DS) did not always provide the minimum values in all scenarios, denying expected result 5 (ER5).
4.2.2 Analysis 2.2
The three rules selected for transaction management strategies in Analysis 2.2 are the following:
-
Mono SKU-FEFO 1 assignment rule (AS), a lane can host only ULs of the same SKU and with the same expiration month.
-
DN opening rule (OS): It foresees the opening of a new lane until the number of dedicated lanes for the SKU_EXP_MONTH is reached.
-
RND dispatching rule (DS): According to the AS, the election of coordinates to a S/R transaction is random among the lanes that contain at least one UL.
Analysis 2.2 demonstrates that, according to the selected AS and OS, using the RND DS, the average total time decreases. The MT rule for the DS was designed to spread missions on different lanes to occupy different vehicles. This way, the system can simultaneously perform more transactions, reducing waiting times. However, with this rule, transactions with near arrival times could choose the same lane, while the RND rule allows the randomness that best represents the spread of transactions on different lanes.
Table 6 shows the results of Analysis 2.2.
Analysis 2.2 shows that the best average total time is 259.49 s with a lane depth of k = 20. This scenario improves the average total time of Analysis 2.1 by 4% and, in addition, generates a smaller SC made of 21,960 storage locations (−16.66% compared to Analysis 2.1), increasing the AFD of busy lanes up to 60% (compared to the 51% of Analysis 2.1).
Analyses 1 and 2 show the impact of OS and DS on system performance. In particular, they validate the expected results 2 (ER2) and 3 (ER3), demonstrating that the combination of MN-MFD rules improves SE and the combination of DN-MT rules improves ST. Moreover, they show that by properly varying the combinations of rules, the warehouse layout that generates the best performance in terms of productivity varies from k = 14 to k = 24 and finally to k = 20.
These results show the importance of selecting the lane depth and transaction management strategies to find the best compromise between SE and ST.
4.3 Analysis 3: AS-oriented
This analysis combines two lane depths, one OS, one DS, and four AS to evaluate how the different rules of the AS impact system performance. The rules selected for Analysis 3 are the following:
-
DN opening rules (OS): It predicts the opening of a new lane until the number of dedicated lanes for the same UL is reached, depending on the selected assignment rule.
-
RND dispatching rule (DS): According to the AS, the selection of coordinates for an S/R transaction is random for lanes that contain at least one UL.
The lane depths selected for this analysis were k = 20 and k = 24, which generated the best performance in terms of ST in Analysis 2.1 and Analysis 2.2. Table 7 shows the results of Analysis 3.
Some considerations regarding the results presented in Table 7:
-
SC depends on the aggregation criterion imposed by the assignment rule. The mono SKU rule requires a smaller capacity, whereas the mono-SKU-BATCH rule requires a larger capacity. This consideration validated expected result 7 (ER7).
-
This analysis shows that the mono SKU-BATCH rule generates the shortest average waiting times. This rule allows the exact number of lanes dedicated to each SKU-BATCH to be estimated. This rule uses the real batch quantity rather than the average batch quantity as in the mono SKU and mono SKU-FEFO rules. The rules that use the average batch quantity must open more lanes than the dedicated lanes when the incoming batch quantity exceeds the average batch quantity. Consequently, forcing the incoming UL to the same new open lane does not allow ULs to be handled simultaneously, increasing waiting times. The mono SKU-BATCH rule spreads incoming ULs to the proper number of lanes, reducing waiting times.
The following example explains this last consideration. Assume k = 10, mono SKU rule (AS), DN rule (OS), and MT rule (DS). There is an incoming UL for a new SKU with an average batch quantity of 40 ULs; thus, there are four dedicated lanes. The incoming UL belongs to a production batch of 60 ULs; thus, the previously quantified four dedicated lanes are filled according to the MT dispatching rule. Two new empty lanes must be opened to host the remaining 20 ULs.
Consequently, filling of the four dedicated lanes follows the MT dispatching rule and attempts to minimise waiting times. However, the filling process involves two additional lanes and generates queues that increase waiting times because the incoming ULs select the same lane until it is completely filled.
Otherwise, if the assignment rule is a mono SKU-BATCH, the incoming production batch of 60 ULs immediately requires six dedicated lanes. In this manner, all ULs follow the MT dispatching rule and attempt to minimise waiting times.
Based on the results and considerations generated from this case study (Analyses 1, 2, and 3), it is possible to identify the combinations of the four leverage types that provide the best performance for SE and ST in all simulated scenarios:
-
1.
The mono SKU (AS), MN (OS), MFD (DS), and k = 8 generated an AFD of 95% for busy lanes.
-
2.
Mono SKU-BATCH (AS), DN (OS), MT (DS), and k = 20 generated an average total time of 210.42 seconds.
The results obtained by this case study are not general, but the proposed methodology is effective to best configure an AVS/RS by the expected S/R transactions. Obviously, different applications and set of data generate different system solutions to the design and configuration of an AVS/RS.
5 Conclusion
This study introduces an original methodology for evaluating the impact of strategic leverage on the performance of a multi-deep-tier-captive AVS/RS. The four strategic leverages in this study are the following:
-
1.
The lane depth.
-
2.
The AS to establish the criterion for storing ULs inside a generic lane.
-
3.
The OS establishes the criterion for assigning an incoming UL to a busy or empty lane.
-
4.
The DS establishes the criteria for selecting a specific lane for incoming and outgoing ULs.
The three outputs analysed in this study, which are critical in real-world industrial applications, are the following:
-
1.
Nominal SC, the total number of storage locations in the system.
-
2.
SE, the ability to exploit available space, is evaluated by the AFD of busy lanes.
-
3.
ST is the average total time required to perform a generic S/R transaction.
The proposed data-driven methodology measures and controls this set of performances according to a what-if, comparative, and competitive multi-scenario analysis based on the hybrid analytical–simulative modelling approach introduced by Battarra et al. (2022a). The number of alternative rules for each leverage generates 468 different scenarios.
The proposed approach and methodology were applied to a food and beverage company. Three analyses were conducted and illustrated: Analysis 1, SE-oriented; Analysis 2, ST-oriented; Analysis 3, AS-oriented.
The following figures summarise the impact of the four leverages on the system performance by combining all rules (468 scenarios). The figures were produced using Minitab statistical software. In Fig. 4, the main effects plot reports the mean AFD for each level of leverage. Similarly, Fig. 5 shows the main effects plot analysis for the average waiting time for a generic S/R transaction. The x-axis contains the values assumed for each leverage: lane depth (k, from 8 to 32), assignment strategy (mono SKU, mono SKU-BATCH, and mono SKU-FEFO), opening strategy (minimum number, dedicated number, and dedicated number with filling degree), and dispatching strategy (maximum filling degree, maximum throughput, and random).

Main effects plot for AVG filling degree of busy lanes (Minitab statistical software)

Main effects plot for AVG waiting time (Minitab statistical software)
Some final considerations regarding the results presented in Figs. 4 and 5:
-
If k increases, the SE (AFD of busy lanes) decreases because the SC increases, and the number of S/R transactions remains the same in different simulated scenarios.
-
Combination of the MN rule (OS) and MFD rule (DS) generated high AFD values; k = 8 provided the highest value among all simulated scenarios.
-
Performing SE, the average waiting times and average total time increased, reducing performance in terms of ST.
-
Combination of the DN rule (OS) and MT rule (DS) generated low average waiting times; k = 20 provided the lowest value among all simulated scenarios.
-
Performing ST, the AFD of busy lanes decreased, resulting in reduced performance in terms of SE.
-
The RND rule (DS) generated lower average waiting times than the MT rule (DS) because it better dispatched S/R transactions into different lanes to reduce congestion and waiting times.
The results and considerations illustrated in the case study section are not general, and depend on the selected application. However, they demonstrate the effectiveness of the proposed methodology in supporting decision-making in the design and configuration (i.e. strategic decisions) of a multi-deep tier-captive AVS/RS according to real dynamics and data with hundreds of SKUs to be handled and thousands of S/R transactions. The proposed methodology supports decision-making also on transaction management (i.e. operations decisions).
Further research is expected on new applications to different system configurations and equipment, such as the number and location of vehicles (shuttles, satellites, lifts), and lanes of variable depth/length, always guaranteeing mono SKU or mono SKU-BATCH homogeneity within the generic lane in the generic time period. These new issues move the AVS/RS problems and decisions from the strategic level (design and configuration) to the management and control levels. An exemplifying question for further research should be the following. Which is the best selection of lane or set of lanes to host an incoming SKU or SKU-BATCH. The data-driven methodology introduced by this paper and design to face with historical or expected data needs to process real-time data. The proposed methodology represents the starting point to face with such challenging issues in real industrial applications supporting decision-making on design, planning, management, and control of AVS/RS.
Data availability
Not applicable.
Code availability
Not applicable.
References
Battarra I, Accorsi R, Manzini R, Rubini S (2022) Storage efficiency in a deep-lane AVS/RS. IFAC-PapersOnLine 55(10):1337–1342. https://doi.org/10.1016/j.ifacol.2022.09.576
Battarra I, Accorsi R, Manzini R, Rubini S (2022) Hybrid model for the design of a deep-lane multi-satellite AVS/RS. Int J Adv Manuf Technol 121:1191–1217. https://doi.org/10.1007/s00170-022-09375-x
Azadeh K, de Koster MBM, Roy D (2017) Robotized and automated warehouse systems: review and recent developments. Soc Sci Res Netw. https://doi.org/10.2139/ssrn.2977779
Lerher T, Ekren BY, Dukic G, Rosi B (2015) Travel time model for shuttle-based storage and retrieval systems. Int J Adv Manuf Technol 78(9–12):1705–1725. https://doi.org/10.1007/s00170-014-6726-2
Lerher T, Ficko M, Palčič I (2020) Throughput performance analysis of automated vehicle storage and retrieval systems with multiple-tier shuttle vehicles. App Math Model 91:1004–1022. https://doi.org/10.1016/j.apm.2020.10.032
Roy D (2016) Semi-open queuing networks: a review of stochastic models, solution methods and new research areas. Int J Prod Res 54(6):1735–1752. https://doi.org/10.1080/00207543.2015.1056316
Khojasteh Y, Son JD (2016) A travel time model for order picking systems in automated warehouses. Int J Adv Manuf Technol 86:2219–2229. https://doi.org/10.1007/s00170-016-8340-y
Ghomri L, Sari Z (2017) Mathematical modeling of the average retrieval time for flow-rack automated storage and retrieval systems. J Manuf Syst 44:165–178. https://doi.org/10.1016/j.jmsy.2017.05.002
Roy D, Krishnamurthy A, Heragu S, Malmborg CJ (2017) A multitier linking approach to analyse performance of autonomous vehicle-based storage and retrieval systems. Comput Oper Res 83:173–188. https://doi.org/10.1016/j.cor.2017.02.012
Eder M (2019) An analytical approach for a performance calculation of shuttle-based storage and retrieval systems. Prod Manuf Res 7(1):255–270. https://doi.org/10.1080/21693277.2019.1619102
Fukunari M, Malmborg CJ (2009) A network queuing approach for evaluation of performance measures in autonomous vehicle storage and retrieval systems. Eur J Oper Res 193:152–167. https://doi.org/10.1016/j.ejor.2007.10.049
Ekren BY, Heragu SS, Krishnamurthy A, Malmborg CJ (2010) Simulation based experimental design to identify factors affecting performance of AVS/RS. Comp Ind Eng 58:175–185. https://doi.org/10.1016/j.cie.2009.10.004
Ekren BY (2011) Performance evaluation of AVS/RS under various design scenarios: a case study. Int J Adv Manuf Technol 55(9–12):1253–1261. https://doi.org/10.1007/s00170-010-3137-x
Marchet G, Melacini M, Perotti S, Tappia E (2013) Development of a framework for the design of autonomous vehicle storage and retrieval systems. Int J Prod Res 51:4365–4387. https://doi.org/10.1080/00207543.2013.778430
Eder M (2022) An analytical approach for a performance calculation of shuttle-based storage and retrieval systems with multiple-deep and class-based storage. Prod Manuf Res 10(1):321–336. https://doi.org/10.1080/21693277.2022.2083715
Manzini R, Accorsi R, Baruffaldi G, Cennerazzo T, Gamberi M (2016) Travel time models for deep-lane unit-load autonomous vehicle storage and retrieval system (AVS/RS). Int J Prod Res 54(14):4286–4304. https://doi.org/10.1080/00207543.2016.1144241
Wang K, Yang Y, Li R (2020) Travel time models for the rack-moving mobile robot system. Int J Prod Res 58(14):4367–4385. https://doi.org/10.1080/00207543.2019.1652778
Yang P, Jin G, Duan G (2022) Modelling and analysis for multi-deep compact robotic mobile fulfilment system. Int J Prod Res 60(15):4727–4742. https://doi.org/10.1080/00207543.2021.1936264
Clements K, Sweeney K, Tremont A, Muralidhara V, Kuhl ME (2016) Evaluation of warehouse bulk storage lane depth and ABC space allocation using simulation. Winter Simulation Conference. 2239-2249. https://doi.org/10.1109/WSC.2016.7822265
Dong W, Jin M (2023) Automated storage and retrieval system design with variant lane depths. Eur J Oper Res. https://doi.org/10.1016/j.ejor.2023.10.006
Accorsi R, Baruffaldi G, Manzini R (2017) Design and manage deep lane storage system layout. An iterative decision-support model. Int J Adv Manuf Technol 92:57–67. https://doi.org/10.1007/s00170-016-9962-9
D’Antonio G, Chiabert P (2019) Analytical models for cycle time and throughput evaluation of multi-shuttle deep-lane AVS/RS. Int J Adv Manuf Technol 104(5–8):1919–1936. https://doi.org/10.1007/s00170-019-03985-8
Marolt J, Kosanić N, Lerher T (2022) Relocation and storage assignment strategy evaluation in a multiple-deep tier captive automated vehicle storage and retrieval system with undetermined retrieval sequence. Int J Adv Manuf Technol 118:3403–3420. https://doi.org/10.1007/s00170-021-08169-x
Acknowledgements
The authors warmly thank the Italian company E80 Group S.p.A, deeply involved in this study, and in particular, Eng. Alberto Lodini, VP Hardware in E80 Group S.p.A, for his priceless work and cooperation to this research project.
Funding
Open access funding provided by Alma Mater Studiorum - Università di Bologna within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Contributions
Not applicable.
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Lupi, G., Accorsi, R., Battarra, I. et al. Space efficiency and throughput performance in AVS/RS under variant lane depths. Int J Adv Manuf Technol 131, 1449–1466 (2024). https://doi.org/10.1007/s00170-024-13160-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-024-13160-3