
Abstract
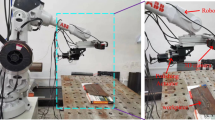
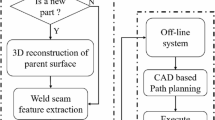
Uneven surface quality often occurs when manual grinding butt welds, so robot welding seam grinding automation has become a fast-developing trend. Weld seam extraction and trajectory planning are important for automatic control of grinding process. However, the research on weld extraction is mostly focused on pre-welding. Due to the irregular shape of the weld after welding and the complex grinding process, there is seldom work that has been devoted to the weld grinding after welding. Consequently, a novel simple but efficient weld extraction algorithm is proposed in this paper, and the robot grinding path is planned. Firstly, a multi-degree of freedom bracket is designed for welding seam extraction. Secondly, the weld profile model is established, and a simple but effective weld extraction algorithm based on model segmentation is proposed to transform the calculating process of spatial point cloud into a two-dimensional point cloud calculating process. The least-square method (LSM) based on threshold comparison is used to segment the weld seam, which greatly improves the processing speed and accuracy. Then, the grinding path and grinding pose are calculated according to the extracted spatial structure of weld seam. Finally, an efficient robotic welding seam automatic grinding system based on model segmentation is built. Experiments’ results showed that the proposed method could make the irregular weld seam contour well-extract after welding and the built grinding system is efficient and reliable. The grinding efficiency is increased by 50%.


















Similar content being viewed by others

Availability of data and material
We confirm that data is open and transparent.
References
Zhu Y, Mu W, Cai Y, Xin D, Wang M (2021) A novel high-efficient welding technology with rotating arc assisted by laser and its application for cryogenic steels. J Manuf Process 68:1134–1146
Baicun W, Jack HS, Lei S, Theodor F (2020) Intelligent welding system technologies: state-of-the-art review and perspectives. J Manuf Syst 56:373–391
Moritz B, Xiru W (2021) A review of fatigue test data on weld toe grinding and weld profiling. Int J Fatigue 45:106073
Fu Z, Ji B, Kong X, Chen X (2017) Grinding treatment effect on rib-to-roof weld fatigue performance of steel bridge decks. J Constr Steel Res 129:163–170
Wang Q, Wang W, Zheng L, Yun C (2021) Force control-based vibration suppression in robotic grinding of large thin-wall shells. Robot Comput-Integr Manuf 67:102031
Zhu D, Feng X, Xu X, Yang Z, Li W, Yan S, Ding H (2020) Robotic grinding of complex components: a step towards efficient and intelligent machining–challenges, solutions, and applications. Robot Comput-Integr Manuf 65:101908
Lin F, Lv T (2005) Development of a robot system for complex surfaces polishing based on CL data. Int J Adv Manuf Technol 26(9–10):1132–1137
Bedaka AK, Lin CY (2018) CAD-based robot path planning and simulation using OPEN CASCADE. Procedia Comput Sci 133:779–785
Comas T, Diao C, Ding L, Williams S, Zhao Y (2017) A passive imaging system for geometry measurement for the plasma arc welding process. IEEE Trans Industr Electron 64(9):7201–7209
Wu C, Gao J, Liu X, Zhao Y (2003) Vision-based measurement of weld pool geometry in constant-current gas tungsten arc welding. Proc Inst Mech Eng Part B J Eng Manuf 217(6):879–882
Charrett T, Bandari Y, Michel F, Ding J, Williams S (2018) A non-contact laser speckle sensor for the measurement of robotic tool speed. Robot Comput-Integr Manuf 53:187–196
Huang S, Niklas B, Yamakawa Y, Senoo T, Ishikawa M (2017) Robotic contour tracing with high-speed vision and force-torque sensing based on dynamic compensation scheme. IFAC-PapersOnLine 50(1):4616–4622
Wang Y, Ding W, Mei D (2021) Development of flexible tactile sensor for the envelop of curved robotic hand finger in grasping force sensing. Measurement 180:109524
Segreto T, Karam S, Teti R, Ramsing J (2015) Feature extraction and pattern recognition in acoustic emission monitoring of robot assisted polishing. Procedia CIRP 28:22–27
Wang N, Zhong K, Shi X, Zhang X (2020) A robust weld seam recognition method under heavy noise based on structured-light vision. Robot Comput-Integr Manuf 61:101821
Liu J, Fan Z, Olsen S, Christensen K, Kristensen J (2015) Boosting active contours for weld pool visual tracking in automatic arc welding. IEEE Trans Autom Sci Eng 14(2):1096–1108
Xu Y, Fang G, Lv N, Chen S, Zou J (2015) Computer vision technology for seam tracking in robotic GTAW and GMAW. Robot Comput-Integr Manuf 32:25–36
Ye Z, Fang G, Chen S, Dinham M (2013) A robust algorithm for weld seam extraction based on prior knowledge of weld seam. Sens Rev 33:125–133
Xu Y, Yu H, Zhong J, Tao L, Chen S (2012) Real-time seam tracking control technology during welding robot GTAW process based on passive vision sensor. J Mater Process Technol 212(8):1654–1662
Xue K, Wang Z, Shen J, Zhen Y, Liu J, Wu D, Yang H (2021) Robotic seam tracking system based on vision sensing and human-machine interaction for multi-pass MAG welding. J Manuf Process 63:48–59
Yang L, Liu Y, Peng J, Liang Z (2020) A novel system for off-line 3D seam extraction and path planning based on point cloud segmentation for arc welding robot. Robot Comput-Integr Manuf 64:101929
Xiao R, Xu Y, Hou Z, Chen C, Chen S (2019) An adaptive feature extraction algorithm for multiple typical seam tracking based on vision sensor in robotic arc welding. Sens Actuators A 297:111533
You DY, Gao XD, Katayama S (2014) Review of laser welding monitoring. Sci Technol Weld Join 19(3):181–201
Shao W, Huang Y, Zhang Y (2018) A novel weld seam detection method for space weld seam of narrow butt joint in laser welding. Opt Laser Technol 99:39–51
Zhang L, Ye Q, Yang W, Jiao J (2013) Weld line detection and tracking via spatial-temporal cascaded hidden Markov models and cross structured light. IEEE Trans Instrum Meas 63(4):742–753
Iakovou D, Aarts R, Meijer J (2005) Sensor integration for robotic laser welding processes. Int Congress Appl Lasers Electro-Opt 2005(1):2301. Laser Institute of America
Ye G, Guo J, Sun Z, Li C, Zhong S (2018) Weld bead recognition using laser vision with model-based classification. Robot Comput-Integr Manuf 52:9–16
Lin C, Chang P, Luh J (1983) Formulation and optimization of cubic polynomial joint trajectories for industrial robots. IEEE Trans Autom Control 28(12):1066–1074
Boryga M, Graboś A (2009) Planning of manipulator motion trajectory with higher-degree polynomials use. Mech Mach Theory 44(7):1400–1419
Ge J, Deng Z, Li Z, Li W, Lv L, Liu T (2021) Robot welding seam online grinding system based on laser vision guidance. Int J Adv Manuf Technol 116(5):1737–1749
Funding
This work was supported by the municipal joint Fund for Natural Science of Hunan Provincial (grant number 2021JJ50116). The Special Fund for the Construction of Hunan Innovative Province (grant number. 2020GK2003). The General Project of Hunan Provincial Education Department, China (grant number. 20C0830).
Author information
Authors and Affiliations
Contributions
Jimin Ge: conceptualization investigation, writing-original draft, writing–review and editing. Zhaohui Deng: writing–review and editing, funding acquisition. Zhongyang Li: writing–review and editing. Wei Li: writing–review and editing. Tao Liu: review and editing. Hua Zhang: funding acquisition. Jiaxu Nie: review and editing.
Corresponding author
Ethics declarations
Ethical approval
We confirm that the manuscript has not been submitted to any other journal. The submitted work is original and has not been published elsewhere in any form or language.
Consent to participate
We confirm that all authors agree with the content and give explicit consent to submit.
Consent for publication
If the article is accepted, we grant the Publisher an exclusive license to publish the article.
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ge, J., Deng, Z., Li, Z. et al. An efficient system based on model segmentation for weld seam grinding robot. Int J Adv Manuf Technol 121, 7627–7641 (2022). https://doi.org/10.1007/s00170-022-09758-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-022-09758-0