
Abstract
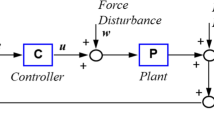
This paper presents a disturbance observer and adaptive controller design for a direct drive motion control system. An indirect adaptive controller is implemented to achieve desired tracking performance as well as deal with system parameters variation. To reduce tracking errors, a newly designed adaptive feed-forward controller is proposed based on an on-line estimated inverse model of the linear motor drive system. A digital disturbance observer is implemented to be included in the proposed feedback-feed-forward control structure to compensate for the undesired nonlinearity and external load disturbance of the direct drive system. Experimental results show that this control scheme can achieve superior contouring accuracy, disturbance rejection and robustness under the influence of friction and cogging force.
Similar content being viewed by others

References
VanBrussel H, Braembussche PV (1998) Robust control of feed drives with linear motors.CIRP Ann 47(1):325–328
Elfizy AT, Bone GM, Elbestawi MA (2004) Model-based controller design for machine tool direct drives. Int J Mach Tools Manuf 44(5):465–477
Tan KK, Huang SN, Lee TH (2002) Robust adaptive numerical compensation for friction and force ripple in permanent-magnet linear motors. IEEE Trans Magn 38(1):221–228
Otten G, Veries T, Amerongen J, Rankers A, Gaal E (1997) Linear motor motion control using a learning feedback controller. IEEE/ASME Trans Mechatron 2(3):179–187
Lin FL, Lin CH, Hong CM (2000) Robust control of linear synchronous motor servodrive using disturbance observer and recurrent neural network compensator. IEE Proc Electr Power Appl 147(4):263–272
Tan KK, Lee TH, Dou HF, Chin SJ, Zhao S (2003) Precision motion control with disturbance observer for pulse-width-modulated-driven permanent magnet linear motors. IEEE Trans Magn 39(3):1813–1818
Su WT, Liaw CM (2006) Adaptive positioning control for a LPMSM drive based on adaptive inverse model and robust disturbance observer. IEEE Trans Power Electron 21(2):505–517
Jacek FG, Zbigniew JP (2000) linear synchronous motors: transportation and automation systems. CRC Press, Boca Raton, FL
Famouri P (1992) Control of a linear permanent magnet brushless dc motor via exact linearization methods. IEEE Trans Energy Convers 7(3):544–551
Astrom KJ, Wittenmark B (1995) Adaptive control, 2nd edn. Addison-Wesley Reading
Yeh S-S, Hsu P-L (2004) Perfectly matched feedback control and its integrated design for multiaxis motion systems. ASME J Dyn Syst Meas Control 126:547–557
Yan MT, Huang CW, Wang CJ (2006) Development of an open architecture CNC system for a wire-EDM machine. Mat Sci Forum 505–507:481–486
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Yan, MT., Huang, KY., Shiu, YJ. et al. Disturbance observer and adaptive controller design for a linear-motor-driven table system. Int J Adv Manuf Technol 35, 408–415 (2007). https://doi.org/10.1007/s00170-007-1173-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-007-1173-y