
Abstract
Background/Introduction
Simultaneous localization and tracking (SLAT) has become a very hot topic in both academia and industry for its potential wide applications in robotic equipment, sensor networks and smart devices. In order to exploit the advantages supported by state filtering and parameter estimation, researchers have proposed adaptive structures for solving SLAT problems. Existing solutions for SLAT problems that rely on belief propagation often have limited accuracy or high complexity. To adapt the brain decision mechanism for solving SLAT problems, we introduce a specific framework that is suitable for wireless sensor networks.
Methods
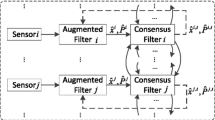
Motivated by the high efficiency and performance of brain decision making built upon partial information and information updating, we propose a cognitively distributed SLAT algorithm based on an adaptive distributed filter, which is composed of two stages for target tracking and sensor localization. The first stage is consensus filtering that updates the target state with respect to each sensor. The second stage employs a recursive parameter estimation that exploits an on-line optimization method for refining the sensor localization. As an integrated framework, each consensus filter is specific to a separate sensor subsystem and gets feedback information from its parameter estimation.
Results
The performance comparison in terms of positioning accuracy with respect to RMSE is shown and the simulation results demonstrate that the proposed ICF-RML performs better than the BPF-RML. This is expected since the distributed estimation with sufficient communication mechanism often achieves higher accuracy than that of less sufficient cases. Furthermore, the performance of the ICF-RML is comparable with that of the BPF-RML even if the latter assumes known prior network topology. We also observe from the results of tracking errors that ICF-RML accomplishes a remarkable improvement in the precision of target tracking and achieves more stable convergence than BPF-RML, in the scenario that all sensors are used to calculate the effect from data association errors.
Conclusion
We apply this approach to formulate the SLAT problem and propose an effective solution, summarized in the paper. For small-size sensor networks with Gaussian distribution, our algorithm can be implemented through a distributed version of weighted information filter and a consensus protocol. Comparing the existing method, our solution shows a higher accuracy in estimation but with less complexity.








Similar content being viewed by others


References
Song Y, Li QL, Kang YF. Conjugate unscented fastSLAM for autonomous mobile robots in large-scale environments. Cognit Comput. 2014;6:496–509.
Taylor C, Rahimi A, Bachrach J, Shrobe H, Grue A, Acm. Simultaneous localization, calibration, and tracking in an ad hoc sensor network. ACM/IEEE international conference on information processing in sensor networks. 2006;16–21.
Li WL, Jia YM, Du JP, Zhang J. Distributed multiple-model estimation for simultaneous localization and tracking with NLOS mitigation. Veh Technol IEEE Trans. 2013;62(6):2824–30.
Teng J, Snoussi H, Richard C, Zhou R. Distributed variational filtering for simultaneous sensor localization and target tracking in wireless sensor networks. Veh Technol IEEE Trans. 2012;61(5):2305–18.
Jiang XY, Lu B, Ren P, Luo CB, Wang XH. Augmented filtering based on information weighted consensus fusion for simultaneous localization and tracking via wireless sensor networks. Int J Distrib Sens Netw. 2015;2015(2):1–7.
Jiang XY, Ren P. Augmented consensus filter for simultaneous localization and tracking with limited sense range. Ann Telecommun. 2016;. doi:10.1007/s12243-016-0536-5.
Kantas N, Singh SS, Doucet A. Distributed maximum likelihood for simultaneous self-localization and tracking in sensor networks. Signal Process IEEE Trans. 2012;60(10):5038–47.
Meyer F, Hlinka O, Wymeersch H, Riegler E, Hlawatsch F. Distributed localization and tracking of mobile networks including noncooperative objects. Signal Inf Process Over Netw IEEE Trans. 2016;2(1):57–71.
Grime S, Durrant-Whyte HF. Data fusion in decentralized sensor networks. Control Eng Pract. 1994;2(5):849–63.
Olfati-Saber R, Sandell NF. Distributed tracking in sensor networks with limited sensing range. American control conference. 2008;3157–3162.
Cervantes JA, Rodriguez LF, Lopez S, Ramos F, Robles F. Autonomous agents and ethical decision-making. Cognit Comput. 2016;8(2):278–96.
Yang T, Shadlen MN. Probabilistic reasoning by neurons. Nature. 2007;447:1075–80.
Takahashi YK, Roesch MR, Stalnaker TA, Haney RZ, Calu DJ, et al. The orbitofrontal cortex and ventral tegmental area are necessary for learning from unexpected outcomes. Neuron. 2009;62(2):269–80.
Kamal AT, Farrell JA, Roy-Chowdhury AK. Information-weighted consensus filters and their application in distributed camera networks. Autom Control IEEE Trans. 2013;58(12):3112–25.
Jiang XY, Zhang HS, Wei W. NLOS error mitigation with information fusion algorithm for UWB ranging systems. J China Univ Posts Telecommun. 2012;19(2):22–9.
Kantas N, Singh SS, Doucet A. A distributed recursive maximum likelihood implementation for sensor registration. 9th international conference on information fusion, Piscataway, NJ, USA, July 10–13. 2006; p. 1–8.
Veale T, Li GF. Distributed divergent creativity: computational creative agents at web scale. Cognit Comput. 2016;8(2):175–86.
Yuan K, Ling Q, Tian Z. Communication-efficient decentralized event monitoring in wireless sensor networks. Parallel Distrib Syst IEEE Trans. 2015;26:2198–207.
Acnowledgments
This study was funded by the National Natural Science Foundation of China (Grant Nos. 61503413 and 61411130134), Shandong Provincial Natural Science Foundation (Grant No. ZR2015FL027), Shandong Outstanding Young Scientist Fund (Grant No. BS2013DX006), the UK Royal Society (Grant no. IE131036) and the Fundamental Research Funds for the Central Universities.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
Xiangyuan Jiang, Peng Ren and Chunbo Luo declare that they have no conflict of interest.
Informed Consent
Informed consent was not required as no humans or animals were involved.
Human and Animal Rights
This article does not contain any studies with human participants or animals performed by any of the authors.
Rights and permissions
About this article

Cite this article
Jiang, X., Ren, P. & Luo, C. A Sensor Self-aware Distributed Consensus Filter for Simultaneous Localization and Tracking. Cogn Comput 8, 828–838 (2016). https://doi.org/10.1007/s12559-016-9423-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12559-016-9423-7