
Abstract
Purpose
Neuro-registration is of primary importance as it has a bearing on the accuracy of neurosurgery. Although the accuracy of surgical robots is within the acceptable medical standards, the overall surgical accuracy is dictated by the errors in the neuro-registration process. The purpose of this work is to automate the neuro-registration process to improve the overall accuracy of the robot-based neurosurgery.
Method
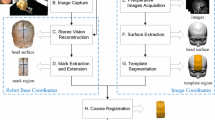
A highly accurate 6-degree-of-freedom Parallel Kinematic Mechanism (6D-PKM) robot is used for both neuro-registration and neurosurgery. In neuro-registration, after measurement of points in the medical image space, the end-platform of the 6D-PKM surgical robot carrying the camera will autonomously navigate towards the fiducial markers to measure its coordinates in the real patient space. An accurate relationship between the medical image space and the real patient space is established, and the same robot will navigate the surgical tool to the target.
Results
In order to validate the proposed method for autonomous neuro-registration, experiments are performed using four phantoms. The four phantoms are as follows: PVC skull model, two acrylic blocks and a glass jar with coaxial shells. These phantoms are specifically designed to simulate the neurosurgical process. All the phantoms are registered successfully using the above-stated method. After autonomous neuro-registration, the coordinates of the target point are determined. Neurosurgery validation is carried out by attaching a 1-mm-diameter needle to the robot platform, which is autonomously traversed to reach the target point passing through the two 2-mm-diameter coaxial holes. The experiments are repeated, and the results reveal very good repeatability.
Conclusion
A method for autonomous neuro-registration has been developed. The robot has been successfully registered using the above method. After successful neuro-registration the overall accuracy of the robot-based neurosurgery is considerably improved. The other benefits of the above method are as follows: elimination of line-of-sight problem, no need of extra unit for neuro-registration, less time for registration, intraoperative registration, human error reduction and low cost.

















Similar content being viewed by others

References
Paraskevopoulos D, Unterberg A, Metzner R, Dreyhaupt J, Eggere G, Wirtz C (2011) Comparative study of application accuracy of two frameless neuronavigation systems: experimental error assessment quantifying registration methods and clinically influencing factors. Neurosurg Rev 34:217–228. https://doi.org/10.1007/s10143-010-0302-5
Kholyavin AI, Nizkovolos VB (2016) Precision stereotactic frameless neuronavigation. Biomed Eng (NY) 50:249–252. https://doi.org/10.1007/s10527-016-9631-1
Salma A, Makiese O, Sammet S, Ammirati M (2012) Effect of registration mode on neuronavigation precision: an exploration of the role of random error. Comput Aided Surg 17:172–178. https://doi.org/10.3109/10929088.2012.691992
Bhutani G (2015) Modeling design and development of frameless stereotaxy in robot assisted neurosurgery. HBNI, Mumbai
Lozano AM, Gildenberg PL, Tasker RR (2009) Textbook of stereotactic and functional neurosurgery. Springer, Berlin
Kaushik A, Dwarakanath TA, Bhutani G, Venkat PPK (2017) Image based data preparation for robot based neurosurgery. In: Machines, Mechanism and Robotics, Proceedings of iNaCoMM 2017. Springer, Berlin
Surgical Navigation Surgical Navigation Systems : Stryker. http://www.stryker.com/latm/products/OREquipmentConnectivity/SurgicalNavigation/SurgicalNavigationSystems/index.htm. Accessed 26 Mar 2018
Medical Software and Hardware Innovators - Brainlab. https://www.brainlab.com/en/. Accessed 26 Mar 2018
Pirotte B, Voordecker P, Joffroy F, Massager N, Wikler D, Baleriaux D, Levivier M, Brotchi J (2001) The Zeiss-MKM system for frameless image-guided approach in epidural motor cortex stimulation for central neuropathic pain. Neurosurg Focus 11:E3. https://doi.org/10.3171/foc.2001.11.3.4
Ronna G (2017) A novel robotic neuronavigation system: RONNA G3. Strojniški Vestn J Mech Eng. https://doi.org/10.5545/sv-jme.2017.4649
Hassfeld S, Zoller J, Albert FK, Christian RW, Knauth M, Muhling J (1998) Preoperative planning and intraoperative navigation in skull base surgery. J Cranio-Maxillo-Facial Surg 26:220–225. https://doi.org/10.1016/S1010-5182(98)80017-6
Willems PWA, Van Der Sprenkel JWB, Tulleken CAF, Viergever MA, Taphoorn MJB (2006) Neuronavigation and surgery of intracerebral tumours. J Neurol 253:1123–1136. https://doi.org/10.1007/s00415-006-0158-3
Grillone GA, Jalisi S (2014) Robotic surgery of the head and neck: a comprehensive guide. Springer, Berlin
Suligoj F, Svaco M, Jerbic B, Sekoranja B, Vidakovic J (2017) Automated marker localization in the planning phase of robotic neurosurgery. IEEE Access 5:12265–12274. https://doi.org/10.1109/ACCESS.2017.2718621
Wang M, Song Z (2009) Automatic localization of the center of fiducial markers in 3D CT/MRI images for image-guided neurosurgery. Pattern Recognit Lett 30:414–420. https://doi.org/10.1016/j.patrec.2008.11.001
Korsager AS, Carl J, Østergaard LR (2016) Comparison of manual and automatic MR-CT registration for radiotherapy of prostate cancer. J Appl Clin Med Phys 17:294–303
Du J, Tang S, Jiang T, Lu Z (2006) Intensity-based robust similarity for multimodal image registration. Int J Comput Math 83:49–57. https://doi.org/10.1080/00207160500112944
Woods RP, Mazziotta JC, Cherry SR (1993) Mri-pet registration with automated algorithm. J Comput Assist Tomogr 17:536–546. https://doi.org/10.1097/00004728-199307000-00004
Brainlab Automatic Image Registration for Brainlab Navigation (GE). https://www.brainlab.com/en/surgery-products/overview-neurosurgery-products/intraoperative-mr/. Accessed 18 Mar 2018
Dwarakanath S, Bhutani G, Venkata PPK, Kaushik A (2017) Generalized point correspondence algorithm for neuro-registration. In: Machines, Mechanism and Robotics, Proceedings of iNaCoMM 2017. Springer, Berlin
Rozet I, Vavilala MS (2007) Risks and benefits of patient positioning during neurosurgical care. Anesthesiol Clin 25:631–653. https://doi.org/10.1016/j.anclin.2007.05.009
Kawaguchi M (2012) Essentials of neurosurgical anesthesia & critical care. Anaesth Intensive Care. https://doi.org/10.1007/978-0-387-09562-2
(2011) PS 3.3-2011 Digital Imaging and Communications in Medicine (DICOM) Part 3: Information Object Definitions. NEMA
Pianykh OS (2011) Digital imaging and communications in medicine (DICOM)
Hartley RZA (2004) Multiple view geometry. Cambridge
opencv dev team Camera calibration With OpenCV—OpenCV 2.4.13.6 documentation. https://docs.opencv.org/2.4/doc/tutorials/calib3d/camera_calibration/camera_calibration.html#theory. Accessed 19 Mar 2018
Alexander Mordvintsev & Abid K (2013) Pose Estimation—OpenCV-Python Tutorials 1 documentation. In: OpenCV. http://opencvpythontutroals.readthedocs.io/en/latest/py_tutorials/py_calib3d/py_pose/py_pose.html. Accessed 19 Mar 2018
Sinha SK, Dwarakanath TA, Jaju A (2017) Six DOF mirror alignment system for beam line applications. In: Machines, Mechanism and Robotics, Proceedings of iNaCoMM 2017. Springer, Berlin
Funding
Funding has been provided by Bhabha Atomic Research Centre, Mumbai, India.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
This article does not contain any studies with animals performed by any of the authors.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
Kaushik, A., Dwarakanath, T.A. & Bhutani, G. Autonomous neuro-registration for robot-based neurosurgery. Int J CARS 13, 1807–1817 (2018). https://doi.org/10.1007/s11548-018-1826-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-018-1826-3