
Abstract
Purpose
A touch panel navigation system may be used to enhance endoscopic surgery, especially for cauterization. We developed and tested the in vitro performance of a new touch panel navigation (TPN) system.
Methods
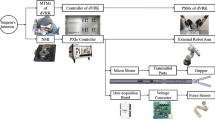
This TPN system uses finger motion trajectories on a touch panel to control an argon plasma coagulation (APC) attached to a robot arm. Thermal papers with printed figures were soaked in saline for repeated recording and analysis of cauterized trajectory. A novice and an expert surgeon traced squares and circles displayed on the touch panel and cauterized them using the APC. Sixteen novices and eight experts cauterized squares and circles using both conventional endoscopic and TPN procedures. Six novices cauterized arcs using the endoscopic and TPN procedures 20 times a day for 5 consecutive days.
Results
For square shapes, the offset was 5.5 mm with differences between the novice and the expert at 2 of 16 points. For circles, the offset was 5.0 mm and did not differ at any point. Task completion time for the TPN procedure was significantly longer than that for the endoscopic procedure for both squares and circles. For squares, the distance from the target for the TPN procedure was significantly smaller than that for the endoscopic procedure. For circles, the distance did not differ. There was no difference in task completion time and distance between the novices and the experts. Task completion time and distance improved significantly for the endoscopic procedure but not for the TPN procedure.
Conclusions
A new TPN system enabled the surgeons to accomplish continuous 3D positioning of the surgical device with automatic depth perception using finger tracing on a 2D monitor. This technology is promising for application in surgical procedures that require precise control of cauterization.








Similar content being viewed by others


References
Shimada J, Nishikawa A (2009) Remote control system. U.S. Patent Number 2009/0187288 to be issued
Shimada J, Ito K, Kato D, Shimomura M, Tsunezuka H, Okada S, Ishihara S (2012) Intuitive touch panel navigation system through Kyoto Digital Sosui Network. Comput Aided Surg Proc Info Common Technol 3:92–100. doi:10.1007/978-4-431-54094-6_11
Shimada J, Ito K, Kato D, Shimomura M, Tsunezuka H, Terauchi K, Ichise K, Ishihara S (2012) Intuitive touch panel control system with tablet PC. Int J CARS 7(Suppl 1):S173–174
Schulder M, Liang D, Carmel PW (2001) Cranial surgery navigation aided by a compact intraoperative magnetic resonance imager. J Neurosurg 94:936–945. doi:10.3171/jns.2001.94.6.0936
Krupa A, Gangloff J, Doignon C, de Mathelin M, Morel G, Leroy J, Soler L, Marescaux J (2003) Autonomous 3-D positioning of surgical instruments in robotized laparoscopic surgery using visual servoing. IEEE Trans Robotics Autom 19:842–853. doi:10.1109/TRA.2003.817086
Zaitsev M, Dold C, Sakas G, Hennig J, Speck O (2006) Magnetic resonance imaging of freely moving objects: Prospective real-time motion correction using an external optical motion tracking system. Neuroimage 31:1038–1050. doi:10.1016/j.neuroimage.2006.01.039
Voros S, Long JA, Cinquin P (2007) Automatic detection of instruments in laparoscopic images. Int J Robot Res 26:1173–1190. doi:10.1177/0278364907083395
Shin S, Kim Y, Kwak H, Lee D, Park S (2011) 3D tracking of surgical instruments using a single camera for laparoscopic surgery simulation. Stud Health Technol Inform 163:581–587. doi:10.3233/978-1-60750-706-2-581
Loukas C, Lahanas V, Georgiou E (2013) An integrated approach to endoscopic instrument tracking for augmented reality applications in surgical simulation training. Int J Med Robot 9:e34–e51. doi:10.1002/rcs.1485
Tonet O, Thoranaghatte RU, Megali G, Dario P (2007) Tracking endoscopic instruments without a localizer: a shape-analysis-based approach. Comput Aided Surg 12:35–42. doi:10.1080/10929080701210782
Uemura M, Tomikawa M, Kumashiro R, Miao T, Souzaki R, Ieiri S, Ohuchida K, Lefor AT, Hashizume M (2014) Analysis of hand motion differentiates expert and novice surgeons. J Surg Res 188:8–13. doi:10.1016/j.jss.2013.12.009
Yamaguchi S, Yoshida D, Kenmotsu H, Yasunaga T, Konishi K, Ieiri S, Nakashima H, Tanoue K, Hashizume M (2011) Objective assessment of laparoscopic suturing skills using a motion-tracking system. Surg Endosc 25:771–775. doi:10.1007/s00464-010-1251-3
Michael D, Diodato M, Sunil M, Prosad M, Mary E, Klingensmith M, Ralph J, Damiano M (2004) Robotics in surgery. Curr Probl Surg 41:752–810. doi:10.1067/j.cpsurg.2004.07.002
Loulmet D, Carpentier A, d’Attellis N, Berrebi A, Cardon M, Ponzio O, Aupècle B, Relland J (1999) Endoscopic coronary artery bypass grafting with the aid of robotic assisted instruments. J Thorac Cardiovasc Surg 118:4–10. doi:10.1016/S0022-5223(99)70133-9
Anthony RL, Castellanos AE, Desai PD, Meyers WC (2004) Robotic surgery: a current perspective. Ann Surg 239:14–21. doi:10.1097/01.sla.0000103020.19595.7d
The da Vinci Surgical System. http://www.intuitivesurgical.com. Accessed May 1, 2014
Chandra V, Nehra D, Parent R, Woo R, Reyes R, Hernandez-Boussard T, Dutta S (2010) A comparison of laparoscopic and robotic assisted suturing performance by experts and novices. Surgery 147:830–839. doi:10.1016/j.surg.2009.11.002
Lawton V, Dmitry O, Stephen H, Hani H, Leonid Z (2003) Measurements of the level of surgical expertise using flight path analysis from da Vinci robotic surgical system. Stud Health Technol Inform 94:373–378
Acknowledgments
This study was financially supported by a Grant-in-Aid for Scientific Research (A) (No. 17209047) and (B) (No. 22390270) from the Japan Society for the Promotion of Science.
Conflict of interest
None.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Okada, S., Shimada, J., Ito, K. et al. A touch panel surgical navigation system with automatic depth perception. Int J CARS 10, 243–251 (2015). https://doi.org/10.1007/s11548-014-1080-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11548-014-1080-2